無人機影像構建文物三維模型研究
2017-05-15 00:38:04李國柱喜文飛李菁珊
蘇州科技大學學報(自然科學版) 2017年2期
李國柱,喜文飛,李菁珊
(1.昆明市測繪研究院,云南 昆明 650051;2.云南師范大學 旅游與地理科學學院,云南 昆明 650500;3.云南冶金集團股份有限公司,云南 昆明 650224)
無人機影像構建文物三維模型研究
李國柱1,喜文飛2,李菁珊3
(1.昆明市測繪研究院,云南 昆明 650051;2.云南師范大學 旅游與地理科學學院,云南 昆明 650500;3.云南冶金集團股份有限公司,云南 昆明 650224)
海量點云數據可以很好構建文物的三維建模,常規的建模周期時間長,外業工作量大。利用無人機攝影技術,依據數字攝影測量原理和計算機視覺原理,通過對影像數據進行定向、匹配、空三加密獲取點云數據,利用點云數據可以進行三維模型構建,結合實際實驗案例進行分析,新方法適合室外文物的三維建模,可達到較好的效果。
點云數據;文物保護;無人機;數字攝影;三維建模
文物是人類智慧的結晶。如何采用新技術在不損傷文物的前提下進行保護,是很多學者研究的一個課題[1]。三維激光掃描技術具有快速獲取目標物體表面三維數據的優勢[2-5],基于海量的點云數據,可以精確快速重建文物完整的三維數字模型,這對文物保護、文物三維虛擬演示、文物修復等領域的研究具有重大意義[6-7]。由于地面三維激光掃描硬件和軟件設備比較貴重,專業性強,而且設站位置有限,不可避免地存在測繪死角,每次只能獲取文物的側面信息,要獲得完整的全部信息,手段十分復雜,因此,地面三維激光掃描技術無法廣泛應用在文物保護中,而最新的無人機攝影技術就可以彌補該方面的不足。
無人機是一個集多技術并依托于硬件的高科技產物,利用無人機可以全方位的對目標物體進行信息采集,在被測物周圍不同角度拍攝一組數字影像,可獲取目標物體豐富的紋理信息,適合小范圍、低成本、低精度的測量任務[8]。王峰等人采用無人機和三維激光掃描技術進行三維建模[9],王鶴等人采用無人機進行滑坡三維重建[10],柴子為等人利用無人機影像進行景觀DEM構建[11],羅寒等人采用影像和三維激光掃描技術進行文物重建[12],無人機技術在各行各業得到了廣泛的應用。筆者以云南師范大學校內某處文物為例,利用無人機技術,結合無人機影像處理軟件及點云數據的三維構網技術進行三維模型構建。
1 SIFT算法原理
數字攝影測量和計算機視覺技術可以對影像進行模型重建,利用無人機獲取影像之后,采用特征點匹配算子進行相片拼接,最后利用重建算法來重構目標物的空間三維信息。文中采用SIFT算子進行影像匹配,首先敘述一下該算法原理。
SIFT算法是David G.Lowe提出的一種基于尺度空間的特征匹配算法,主要是利用高斯差分金字塔模型[13]。高斯金字塔的本質上為信號的多尺度表示法,將同一信號或圖片多次的進行高斯模糊,并且向下取樣,以產生不同尺度下的多組信號或圖片以進行后續的處理。
Koenderink和Lindeberg在基于一系列合理的假設條件下,證明了高斯函數可能是實現圖像尺度變換的唯一尺度空間核,可以將一幅圖像的尺度空間定義為

式中:*代表x和y的卷積操作,(x,y)是像素點空間坐標,s是像素點尺度坐標,G(x,y,s)是尺度可變高斯核函數,定義為

David G.Lowe提出了使用高斯差分算子來建立圖像的高斯差分尺度空間。利用不同尺度的高斯差分核與圖像卷積,就可以得到不同尺度的高斯差分圖像D(x,y,s),所有的高斯差分圖像組成了圖像的高斯差分金字塔。

對無人機影像進行相對定向之后,再根據SIFT算子的特征點匹配算法獲取大量特征點,然后根據特征點進行自動匹配。
2 實驗案例
2.1 無人機獲取數據
文中以云南師范大學校園一處文物為例,采用無人機對目標環繞飛行一周進行拍照。
無人機:大疆無人機PHANTOM3;指標為:起飛重量1 280 g,采用GPS/GLONASS雙模,像素1 240萬,鏡頭FOV 94°20 mm,f/2.8。
運行環境為:Win7系統,內存4.00 GB,64位操作系統。編程軟件為C++,建模軟件為Geomagic軟件。
拼接軟件采用Pix 4D mapper軟件,該軟件是一款集全自動、快速、專業、精度為一體的無人機數據和航空影像處理軟件,可以快速實現點云數據提取。
這次實驗構建三維模型的主要思路設計如下:(1)利用無人機獲取原始影像數據,獲取過程中保持航向重疊度不能低于60%,獲取過程中要保持航高一致,外業采集數據光線要均勻;(2)獲取的影像數據要進行質量檢查,利用軟件檢查影像是否滿足建模的質量需求,如果不滿足要進行補飛;(3)采用SIFT算子進行影像匹配;(4)根據空三加密的原則生成點云數據;(5)構建空間三角網;(6)構建三維模型。
其主要操作處理流程如圖1所示。

圖1 影像數據處理流程
依照上述操作流程,利用無人機獲取了文物的照片,原始照片如圖2所示,對照片進行了配準對齊、生成密集點云等一系列操作后,生成的點云數據如圖3中所示,從圖3可以看出,產生了很多雜點,模型重建前必須要進行點云去噪工作,去噪后的點云數據如圖4所示。

圖2 原始照片

圖3 點云數據
圖4 去噪的點云數據
2.2 構建空間三角網算法
算法思路:
第一步:離散點云數據的導入,點云數據重心坐標及密度的計算。
第二步:構建第一條基邊。以任意一點為起點,設定距離閾值和搜索范圍,搜索最近點構建基邊。搜索范圍的設置:根據點云密度,設置邊長為d的正方體空間進行搜索。構建第一個三角形。
第三步:構建完第一個三角形后,開始搜索“第三點”,“第三點”與最近的邊可以構成新的三角形,計算前一個三角形與新三角形的法向量夾角,設定閾值為90°(閾值可以根據物體表面的復雜度及點云數據密度來設定),如果小于90°,則符合要求,最后采用最大夾角法來選取最佳點,如果大于90°,則舍棄,繼續搜索。
基于以上思想,構建的空間三角網如圖5所示,圖5為整個文物的三角網模型,從圖上可以看出,構建的三角網可以很好的表現文物的細節部分,曲率變化比較明顯的地方顯示的也非常清晰。?

圖5 點云數據空間三角網
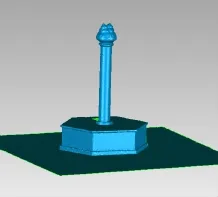
圖6 文物三維模型
利用構建的空間三角網對點云數據建立拓撲關系,構建的拓撲關系在Geomagic軟件里進行三維模型構建,構建的模型如圖6所示。從該三維模型可以看出,模型非常逼真,可以滿足文物的精細建模。
3 結語
利用無人機影像進行三維建模,通過將影像轉換為點云數據,再利用生成的點云數據結合空間三角網構網手段,可以很好的構建文物的三維模型,與常規的三維激光掃描構建文物相比,該方法成本低、建模速度快,對室外文物可以全方位無死角地構建三維模型,這對于建筑物快速構建三維模型也有很好的借鑒意義。當然,對于室內的文物,無人機攝影技術是不能滿足需要的。
[1]王昌翰,向澤君,劉潔.三維激光掃描技術在文物三維重建中的應用研究[J].城市勘測,2010(6):67-70.
[2]張宏偉,賴百煉.三維激光掃描技術特點及其應用前景[J].測繪通報,2012(S1):320-322.
[3]尹玉廷.地面3維激光掃描技術在古建筑保護中的應用研究[J].測繪與空間地理信息,2013,36(2):91-93.
[4]田宗建.3維激光掃描技術在測量中的應用[J].測繪與空間地理信息,2012,35(7):124-125.
[5]白成軍,吳蔥.文物建筑測繪中三維激光掃描技術的核心問題研究[J].測繪通報,2012(1):36-38.
[6]吳玉涵,周明全.三維掃描技術在文物保護中的應用[J].計算機技術與發展,2009,19(9):173-176.
[7]喜文飛,李國柱.一種新的點云數據壓縮質量評定方法[J].甘肅科學學報,2013,25(3):73-75.
[8]李隆方,張著豪,鄧曉麗,等.基于無人機影像的三維模型構建技術[J].測繪工程,2013,22(4):85-89.
[9]王峰,宋楊,高志國,等.UAV航測和TLS技術在廣鋼遺址測繪建模中的應用[J].測繪通報,2016(4):72-74.
[10]王鶴,劉軍,王秋玲.利用無人機影像進行滑坡地形三維重建[J].測繪與空間地理信息,2015,38(12):68-71.
[11]柴子為,康峻,王力,等.基于無人機影像的山地人工林景觀DEM構建[J].遙感技術與應用,2015,30(3):504-508.
[12]羅寒,王建強,張飛,等.兩種建模方法在古文物三維模型重建中的研究[J].工程勘察,2016,44(2):41-44.
[13]LOWE D G.Distinctive image features from scale-invariant key points[J].International Journal of Computer Vision,2004,60(2):91-110.
3D modeling of the cultural relics with UAV photography
LI Guozhu1,XI Wenfei2,LI Jingshan3
(1.Kunming Institute of Surveying and Mapping,Kunming 650051,China;2.College of Tourism and Geographic Sciences,Yunnan Normal University,Kunming 650050,China;3.Yunnan Metallurgical Group Co.,Ltd.,Kunming 650224,China)
The 3D modeling of the cultural relics can be done with the massive data of point cloud.The traditional modeling of cultural relics was longer,and the technical difficulty was greater.With the UAV photography based on the principles of digital photogrammetry and those of computer vision,we obtained point cloud data by directing,matching,empty three encrypting the image data.Then the 3D modeling was constructed with those point cloud data.The experimental results show this method is suitable for the outdoor 3D modeling of cultural relics and can achieve a good effect.
point cloud data;cultural relic protection;unmanned aerial vehicle;digital photography;3D modeling
責任編輯:謝金春
P208
:A
:2096-3289(2017)02-0063-04
2016-10-20
國家自然科學基金資助項目(41361042);云南省教育廳研究基金資助項目(2016ZZX067)
李國柱(1973-),男,云南昆明人,正高級工程師,碩士,研究方向:測繪生產管理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46
