基于MATLAB的雙饋風電機組仿真技術研究
2017-05-15 01:49:44單媛陳林盧勇
風能 2017年1期
文 | 單媛,陳林,盧勇
基于MATLAB的雙饋風電機組仿真技術研究
文 | 單媛,陳林,盧勇
風電場大多集中在擁有巨大風能資源的高山、荒野、海灘、海島等偏遠地區,其自然環境十分惡劣。而且,風電機組是一項涉及機械、電力、電子、液壓、控制、計算機、空氣動力學等多學科的綜合性高技術系統工程,在真實的風電機組上進行實驗研究,需要耗費大量的人力、物力、財力。
在機組的設計和研究初期,槳葉的空氣動力學特性、傳動鏈的結構動力學特性、電氣特性通常采用實測方法來完成,隨著科技的不斷進步,現在一般采用軟件模擬系統來實現各個部件的特性。與真實的風電場機組試驗相比,軟件系統模擬不受環境限制,便于在短時間內對各種工況條件下的風電機組控制運行特性進行全面檢驗、分析與研究。
目前國內用于風力發電研究的仿真軟件主要有MATLAB/Simulink、GH Bladed、HAWC、DigSILENT、PSCAD、ANSYS、Saber等,這些軟件在風力發電仿真研究方面各有側重點,在國內研究應用比較多的是MATLAB/ Simulink和GH Bladed。本文將圍繞MATLAB軟件對風電原理與仿真技術進行研究。
風電機組數學建模
一、風速模型
風速模型是由平均風速、漸變風、隨機風和陣風4種風況疊加的模型。基本風由風電場測風所得的威布爾分布參數近似確定,其數學模型為:

式中,VA為平均風速;A、 K˙為威布爾分布的尺度參數和形狀參數;Γ為伽馬函數。A和值是通過測風塔一段時間的統計計算得到,該方法將這段時間內的風速等效為穩態的平均風速。
風速的漸變特性為風速在一段時期內按照固定速度上升或者下降,其數學模型為:
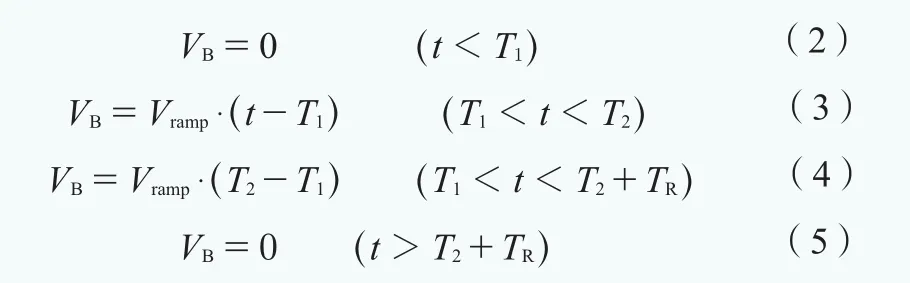
式中,VB為漸變風速;Vramp為風速斜率;T1為漸變風開始時間;T2為漸變風結束時間;TR為漸變風保持時間。
風速的陣風特性為風速在某一時刻突然快速上升到達峰值后快速下降,其數學模型為:
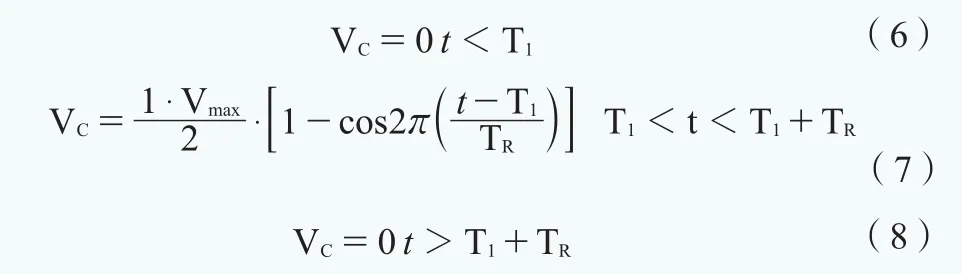
式中,VC為陣風風速;Vmax為陣風峰值;T1為陣風開始時間;TR為陣風持續時間。風速的隨機特性為風速圍繞平均風速以多個頻率、幅值疊加隨機變化。
隨機風速數學模型為:
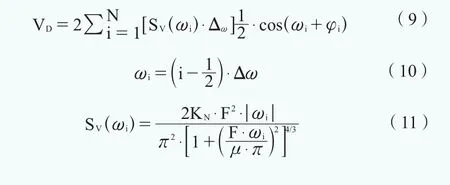
式中,φi為0-2π之間均勻分布的隨機變量;KN為地表粗糙系數,一般取0.004;F為擾動范圍(m2);μ為相對高度的平均風速(m/s);Sv(ωi)為風速隨機分量分布譜密度(m2/s);通過對功率譜密度函數進行積分即可得到短期的風速數據。
模擬實際作用在風電機組上的風速為:
式中,VS為合成仿真風速;VA為平均風速;VB為漸變風速;VC為陣風風速;VD為隨機風速。
二、氣動數學模型
根據風能的流體動能、動量和貝茲理論,風輪從風能中捕獲的氣動功率為:

式中,ρ為空氣密度,Cp(λ,β)為風電機組的風能利用系數;A為掃風面積;v為風速;λ為葉尖速比,β為槳距角。
Cp(λ,β)為風電機組的風能利用系數可用下式近似表達:

系數c1=0.5176,c2=116,c3=0.4,c4=5,c5=21,c6=0.0068。Cp中λ的值對應不同的β值。如圖1所示,Cp的最大值(Cpmax=0.48)是β=0和λ=8.1的最佳風能捕獲系數。
風輪從風中捕獲風能轉換的機械轉矩為:

式中,Tm為機械轉矩;ω1為上一次風輪轉速。風輪的加速度為:

式中,Tm為機械轉矩;Ti為電磁轉矩,T為轉動慣量。風輪轉速為:

式中,a為風輪加速度,ω為當前轉速,ω1為上一次風輪轉速。
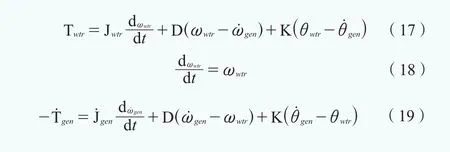
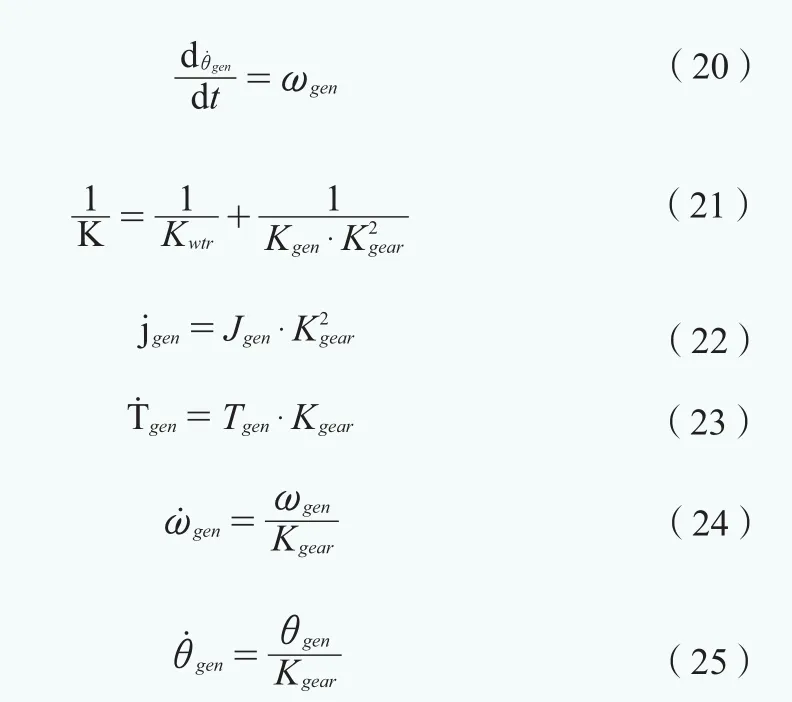
三、傳動數學模型
風電機組的傳動系統包括風輪、主軸、齒輪箱、聯軸器和發電機。為了便于數學建模和計算分析,將傳動系統等效成風輪、發電機2個質量塊的二階彈性阻尼模型,發電機等效到風輪轉速端模型。
四、變槳響應模型
變槳系統一般包含位置閉環控制、速度閉環控制和轉矩閉環控制等,數學模型較為復雜。為了簡化變槳系統模型,可將變槳系統等效為位置的一階響應模型,其數學模型的傳遞函數為:

式中,θout為槳距角一階響應輸出值;θset為槳距角設定值。
五、發電機響應模型
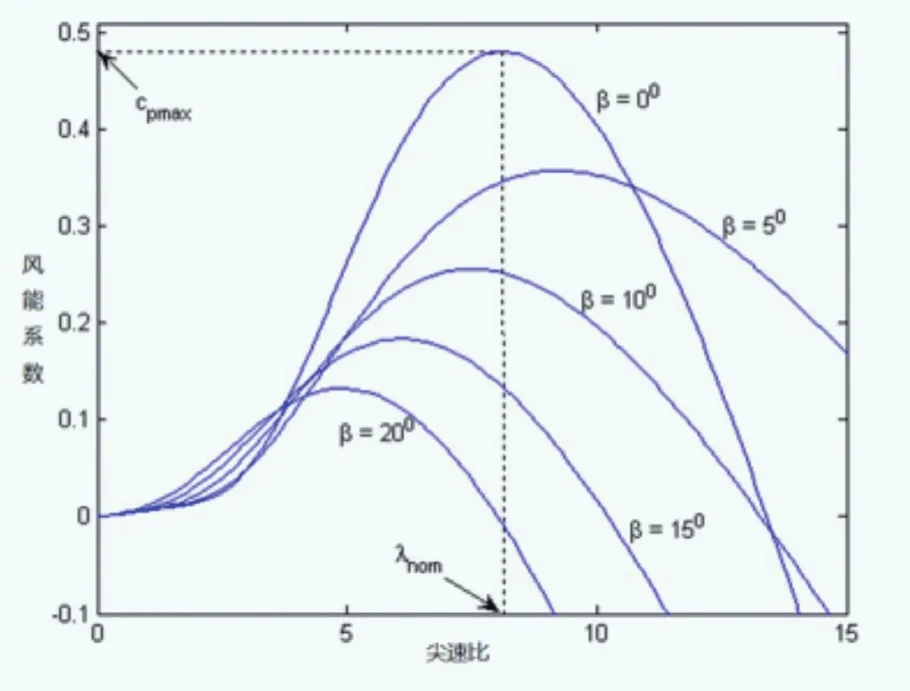
圖1 風電機組風能系數曲線
發電機一般包含有功閉環控制、無功閉環控制、轉矩閉環控制等,數學模型較為復雜。發電機和變流器與風電機組控制系統之間的控制接口一般為轉矩,為了簡化發電機模型,忽略發電機的電氣特性,可將發電機等效為轉矩的一階響應模型,其數學模型的傳遞函數為:
式中,Tout為槳距角一階響應輸出值;Tset為槳距角設定值;Pgen為發電機機械功率;ωgen為發電機角速度。
最大風能捕獲策略
風電機組最大能量捕獲的方法:風速在切入風速和額定風速之間變化時,以發電機轉速作為控制輸入量,根據轉速傳感器測得的轉速信號,控制發電機轉速變化,使得尖速比維持最佳值不變,同時保持槳葉槳距角為0度,使得風電機組追蹤最佳功率曲線,具有最高的風能轉換效率。
對于變速變槳距風電機組來說,在風速低于額定風速的情況下,主要采用變速調節方式,即通過調節發電機轉子轉速,得到最佳葉尖速比,獲得最大風能轉換功率;當風速大于額定風速時,采用變槳距恒功率調節方式,即通過調節槳距角,使得發電機輸出功率基本等于額定功率。變速變槳距機組轉矩-轉速關系曲線如圖2所示。變速變槳距的轉矩-轉速關系曲線由A-B-C-D組成,轉速低于A點時,此時機組無動作,輸出功率為0;A-B段為機組快速啟動階段;B-C段為機組變速控制時追蹤最大功率曲線階段;C-D段機組轉速不再增大,而轉矩繼續增大;到達D點后,機組采用變槳距控制,維持額定功率不變。
雙饋風電機組仿真
在MATLAB中分別建立風電機組主電路模型模塊、氣動模型模塊、傳動鏈模型模塊、發電機模型模塊、變流器控制系統模塊。分別對各個模塊進行參數設置,并封裝成雙饋風電機組仿真模型。雙饋風電機組仿真模型如圖3所示。A、B、C分別為雙饋感應電機三相電信號輸入端;Wind為風速輸入信號;Trip為系統保護輸入信號,取邏輯值0或1,當取Trip為0時,雙饋感應電機并網,控制系統起作用,取1時,雙饋感應電機離網,控制系統不起作用。一個輸出端m為混合信號輸出端,它包含雙饋電機定轉子電壓、電流、有功功率、無功功率、機械轉矩、電磁轉矩、轉子轉速、槳葉槳距角等29個信號。
仿真驗證
在MATLAB中建立風電場仿真模型,該模型使用母線電壓、變壓器等模擬雙饋風電機組外圍設備,使雙饋風電機組能模擬電網正常發電運行。仿真參數設置如下:雙饋感應電機額定功率為6*2 MW;定子額定電壓為690V;額定頻率為50 Hz;定子電阻為0.00658Ω;轉子電阻為0.00549Ω;勵磁漏感為2.9 pu;慣性常數為5.04;摩擦系數0.013;轉換器最大功率0.5pu;標稱直流母線電壓1050V;C點風速12m/s;三相電抗器L1為2500MVA,X0/X1=3;變壓器T1為47MVA,110kV/35kV;變壓器T2為6*1.75MVA,35kV/690V;變壓器T3為接地變壓器。風電場仿真模型如圖4所示。
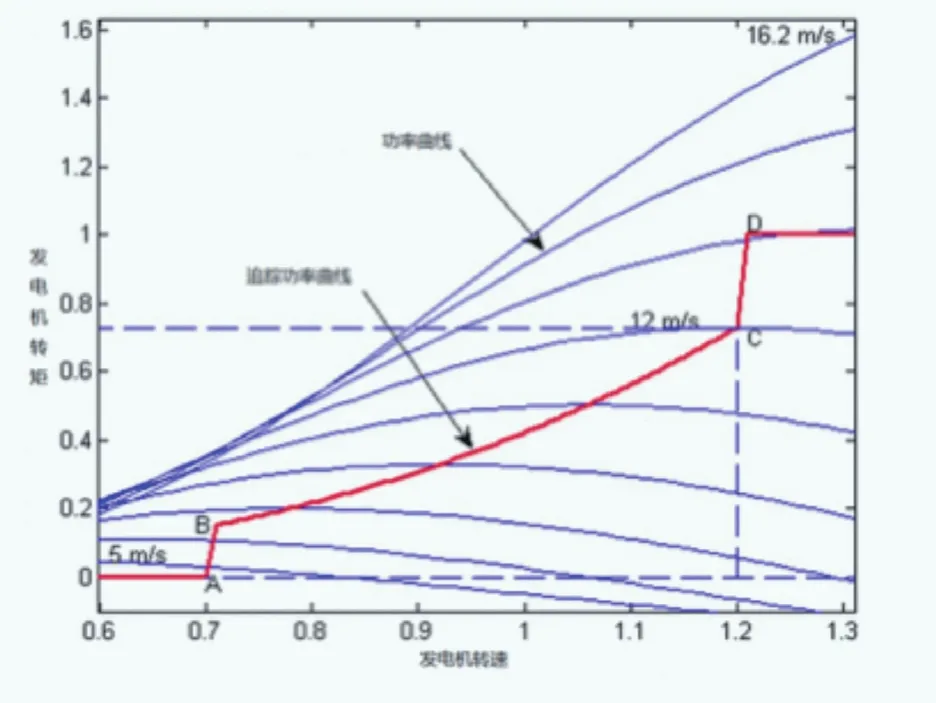
圖2 變速變槳距風電機組轉矩-轉速關系曲線
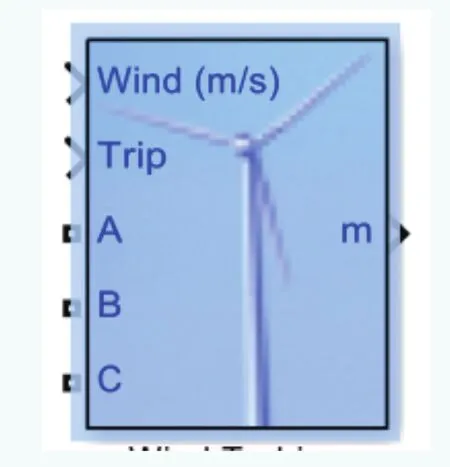
圖3 雙饋風電機組仿真模型
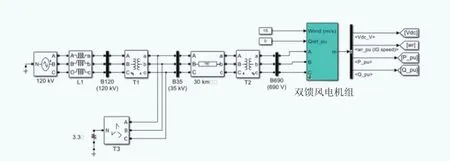
圖4 風電場仿真模型
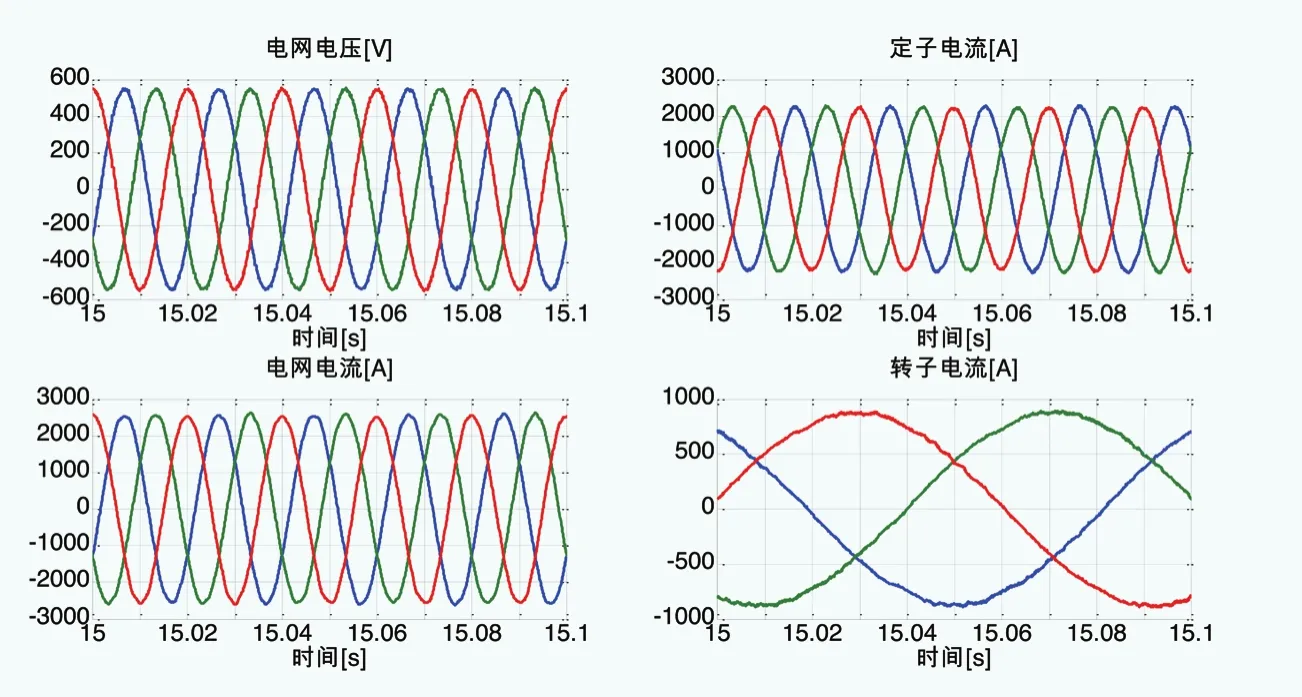
圖5 電網電壓、電網電流相關參數運行的仿真結果
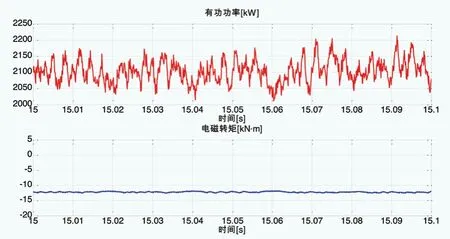
圖6 風電機組有功功率、電磁轉矩仿真結果
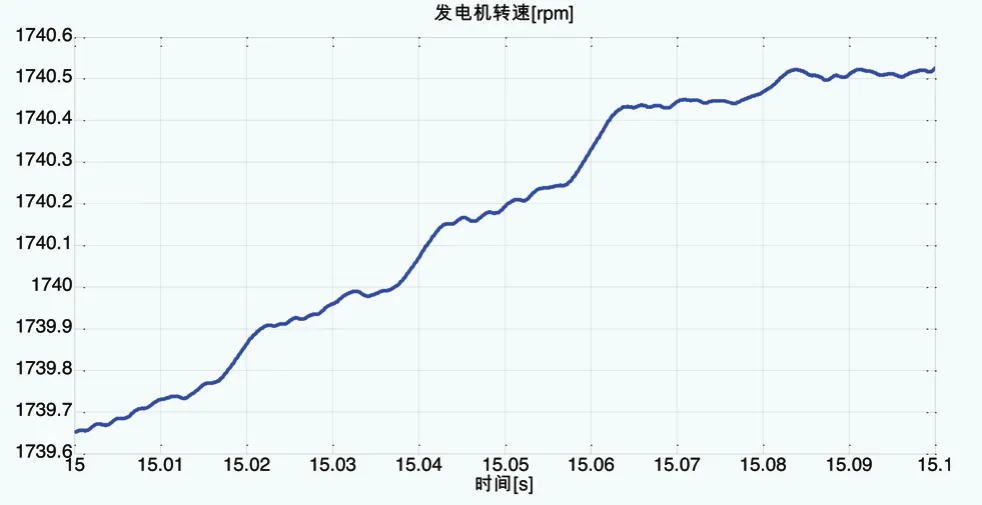
圖7 風電機組發電機轉速仿真結果
仿真過程中,風速輸入信號為一階躍信號,風速在時間5s時由8m/s階躍到14m/s。C點風速設定為12m/s,仿真算法選擇可變步長算法,仿真運行時間為50s。電網電壓、電網電流相關參數運行的仿真結果如圖5所示,風電機組相關參數的仿真結果如圖6、圖7所示。
結語
本文以風電機組主電路模型模塊、氣動模型模塊、傳動鏈模型模塊、發電機模型模塊、變流器控制系統模塊為基礎,在MATLAB中建立機組的簡化模型,該模型與三相電抗器、變壓器等機組外圍設備形成一個風電場,使雙饋機組能模擬電網正常發電運行。通過仿真參數設置模擬了一個12MW風電場的運行情況,替代了傳統物理實驗的方式。隨著技術的不斷發展和進步,MATLAB建模仿真技術的應用也越來越受到關注和重視。
(作者單位:中車株洲電力機車研究所有限公司風電事業部)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
大電機技術(2017年3期)2017-06-05 09:36:02
光學精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31