電池化成用的能量回饋型直流變換器
2017-05-17 13:48:54李科科王介陽張建濤
自動化儀表 2017年5期
關鍵詞:系統
李科科,陳 健,王介陽,張建濤
(1.廣東工業大學信息工程學院,廣東 廣州 510006;2.廣東工業大學機電學院,廣東 廣州 510006)
電池化成用的能量回饋型直流變換器
李科科1,陳 健2,王介陽1,張建濤1
(1.廣東工業大學信息工程學院,廣東 廣州 510006;2.廣東工業大學機電學院,廣東 廣州 510006)
電池在首次使用前需要進行多次充放電。電池化成的效果將極大影響電池的使用性能。目前市面上主流的化成裝置主要采用電阻耗散的方式放電,能源利用率低。針對這一問題,為有效回收放電能量,實現循環利用,同時盡可能提高能源轉換效率,設計了基于雙向直流變換器的電池化成裝置。該裝置可以實現對電池能量的高效回收,徹底改變放電能量的丟失問題。采用開關電源的方案實施,將進一步提升能源的轉換效率。該裝置采用STM32F334作為控制器,以雙向Buck/Boost為主電路的拓撲結構,采取模糊PI結構對環路進行補償,實現對充放電過程中電壓和電流的高精度控制,控制精度高達0.05%(FS)。通過與傳統的化成裝置進行測試比較,結果表明,能量回饋型的電池化成裝置的節能率高達70%。該裝置將逐漸成為市場的主流。
電動汽車;直流變換器; 能量回饋; 電池化成; 高精度; 模糊控制
0 引言
電動汽車行業近年來的飛速發展,給電池相關產業提供了千載難逢的機遇[1]。電池是電動汽車的能量源,其在電動汽車中具有舉足輕重的地位。然而,電池出廠前往往需要進行多次的充放電過程。所謂的電池化成[2],是指對二次電池充放電的過程。老一代的電池化成工藝所使用的電源大多為線性電源[3]。眾所周知,線性電源具有紋波小、噪聲小等突出優勢[4],但同時也存在嚴重的缺陷,即充電完成后的電池能量只能通過熱能釋放,而不可以重復利用。這種無回收的化成方式不僅嚴重降低了能源的利用率,更是與當今“可重復、高效率”的節能減排[5]政策相沖突,因而迫切需要一種高效方案來彌補當前方式的不足。由此能量回饋式的電池化成方式應運而生[6]。
1 原理與設計
1.1 系統硬件設計
1.1.1 系統框架
能量回饋式電池化成系統能實現能量從交流220 V端到電池端的傳遞,反之亦然。在符合能量守恒的條件下,多個DC/DC模塊可以同時并聯在一個AC/DC模塊下,實現功率的擴展。但多個模塊并聯后將帶來更嚴重的電磁干擾(electro magnetic interference,EMI)問題[7],需要開發者花費更多的時間來處理通道之間的干擾。能量回饋型電池化成系統的整體框架圖如圖1所示。
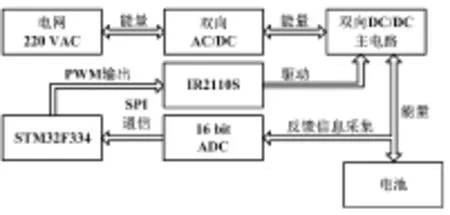
圖1 系統整體框架圖
STM32F334是意法半導體專門針對數字電源領域的主打芯片。STM32F334的分辨率高達217 ps。此外,靈活的上下沿死區時間設置、錯誤事件強制打斷輸出等豐富的片上資源,也為開發過程提供了諸多便捷。與傳統的DSP C2000系列產品相比,STM32F334具有明顯的價格優勢,所以越來越多的電源開發者選擇這款芯片作為主控芯片。
1.1.2 系統的主電路
拓撲結構所采用雙向Buck/Boost 拓撲[8]。它是一種以Buck拓撲為基礎的演變拓撲,準確來說,是在Buck拓撲的續流二極管端并上一個MOS管而構成的。系統主電路圖如圖2所示。
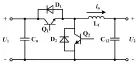
圖2 系統主電路圖
在充電模式下,系統可以看作一個同步整流的Buck電路;在放電模式下,系統可以看作同步整流的Boost電路。需要注意的是:由于負載是電池,所以電路始終是工作在CCM模式,而不會進入DCM模式。占空比和輸入、輸出電壓的關系可以參考CCM模式下它們之間的線性關系[9]。根據電路的開關模態,當上管導通、下管關斷時,輸入電壓U1、Q1和Lf以及輸入電壓U2組成一個回路;當下管導通、上管關閉時,由Q2、輸入電壓U2和Lf組成一個回路[10]。根據兩個回路可以列出微分方程,分析并推導關于電感、輸出電容Cf2和輸入電容Cf1的計算公式,供開發者在進行主電路參數設計時參考:
(1)
式中:U2為輸出電壓;T為開關周期;U1為輸入電壓,I0為額定輸出電流。
(2)
式中:U2為輸出電壓;T為開關周期:U1為輸入電壓;Lf為電壓紋波系數。
(3)
式中:I0max為最大的反向輸出電流;Dmax為最大占空比;fs為開關頻;ΔU為反向電壓紋波系數。
1.1.3 電壓采樣電路
對于高精度系統來說,采樣環路的器件選型不僅要求器件的非線性誤差較低,同時也要求器件的精度較高。電壓采樣電路如圖3所示。
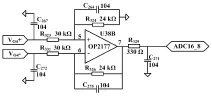
圖3 電壓采樣電路圖
該電壓采樣電路是由精密運放OP2177和精密電阻組成的四階低通有源濾波電路,能夠很好地濾除系統的開關噪聲和電源噪聲[11-12],大大減小了系統軟件濾波的壓力。
1.2 系統軟件設計及控制算法
1.2.1 控制框架
系統控制框圖如圖4所示。
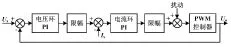
圖4 系統控制框圖
圖4中:Us為給定電壓值;Is為給定電流值。電壓環和電流環是采用模糊PI結構進行環路補償[13]。根據穩態特性和靜態特性的調整情況,最終電流環的帶寬為5 kHz,電壓環的帶寬為1.25 kHz。電壓電流雙閉環結構是一種常見的數字電源控制結構。當電路進入恒流狀態時,電流環起調節作用,電壓環承擔過壓關斷作用[12]。當電路進入恒壓狀態時,電壓環起調節作用,電流環起過流關斷作用。
1.2.2 模糊PI控制算法
PI控制是數字電源中常用的環路補償方法,通過傳遞函數化簡和離散域的轉換,可以得到離散型PI函數:
(4)
式中:K1為當前拍系數;K2為前一拍系數。
分析其離散型傳遞函數可知,PI控制其實也是一種特殊的2P2Z控制[14],因而可以采用環路補償的思想來解決P、I參數設定問題,利用波特圖來獲取P、I參數。首先需要獲取系統的開環傳遞函數。獲得系統的開環傳遞函數途徑有很多,環路分析儀是較實用的一種方法。系統經PI校驗前后的幅值裕量圖和相角裕量圖分別如圖5、圖6所示。由PI調節后,系統的相角裕度由校驗前的-2°改為校驗后的30°。根據轉角頻率,可以得到:Kp=51.6、Ki=1。
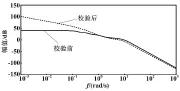
圖5 系統幅值裕量圖
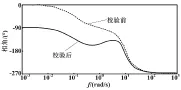
圖6 系統相角裕量圖
根據模糊PI的規則,可以得到:P=Kp+ΔKp、I=Ki+ΔKi。此外還需要獲得ΔKp和ΔKi。由偏差以及偏差的變化率,可以建立ΔKp和ΔKi的模糊規則表,模糊化后再經加權平均法進行解模糊,就可以獲得得ΔKp和ΔKi的值。需要說明的是,本系統中PI模糊控制器隸屬度函數采用三角形隸屬度函數形式。ΔKp和ΔKi模糊規則分別如表1、表2所示。

表1 ΔKp模糊規則表
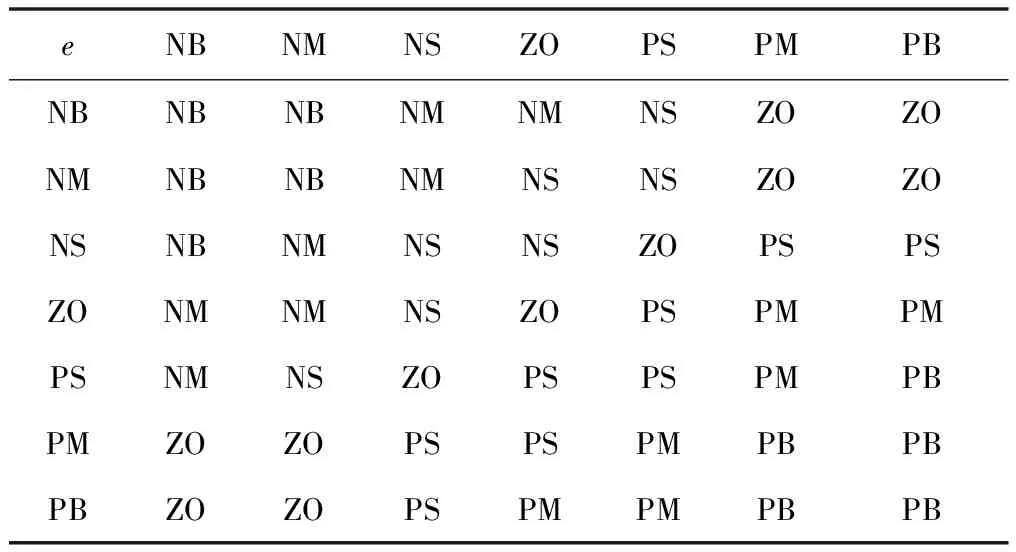
表2 ΔKi模糊規則表
模糊PI控制和PI控制系統響應對比圖如圖7所示。從圖7可見,模糊PI控制在調節時間、超調量等方面具有明顯的優勢。
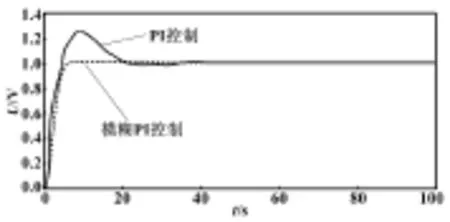
圖7 系統響應對比圖
2 試驗
實際設計過程中,為了獲得最佳的動靜態性能,主電路參數會根據計算進行微調。實際主要參數為:L=13 μH,輸出電容Co=940 μF,輸入電容Ci=470 μF,開關頻率為100 kHz。
①系統的精度分析。
實際生產過程中,由于器件本身的不一致性和元器件本身線性誤差的存在[15],需要將原始電壓、電流數據利用Matlab進行一次擬合。數據經過y=kx+b的一次校驗后,本系統的電壓和電流精度都保持在0.05%(滿度電流為10 A,滿度電壓為5 V)內。電流、電壓測量數據分別如表3、表4所示。
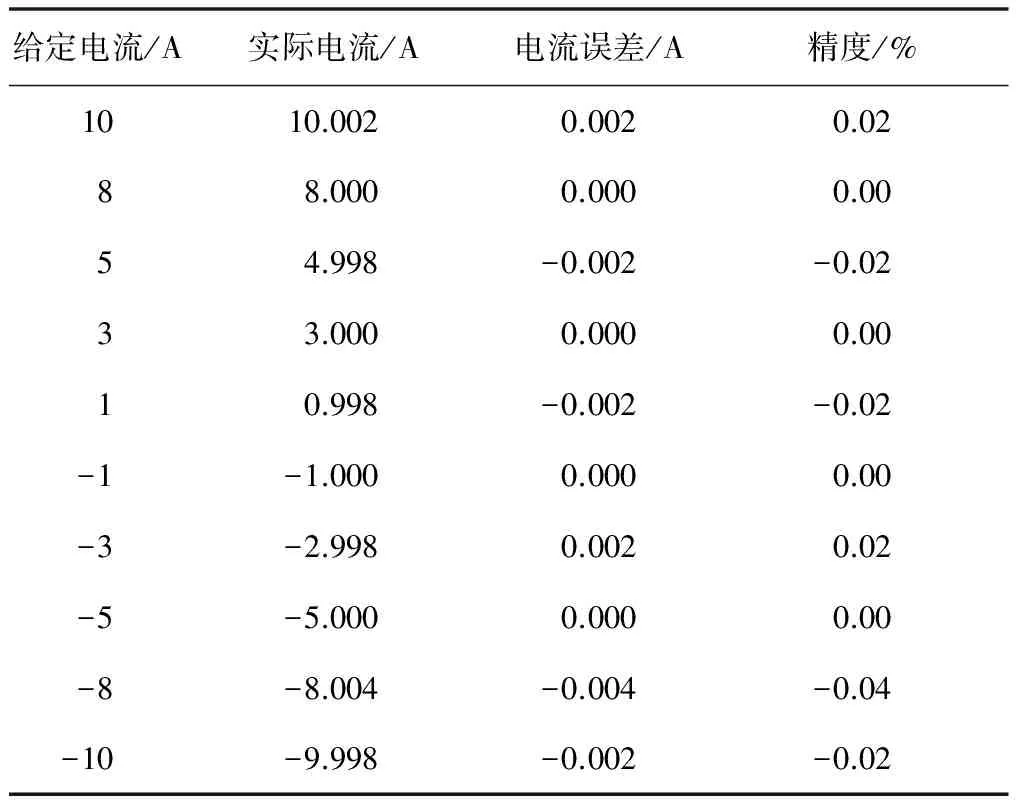
表3 電流精度和線性測量數據
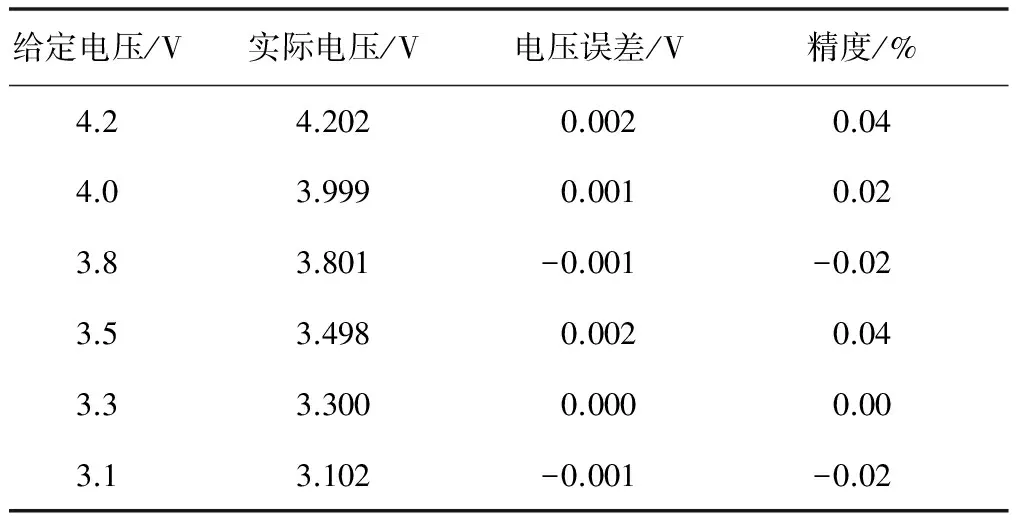
表4 電壓精度和線性測量數據
②試驗紋波分析。
在滿度充電情況下,電路輸出電流I=10 A,通過示波器測得紋波電流約60 mA;在滿度放電情況下,電路輸出電流I=-10 A,通過示波器測得紋波電流約為65 mA。本系統的充放電紋波系數均在1%以內。
3 結束語
采用模糊PI控制的能量回饋性電池化成裝置具有良好的動態特性和穩態特性,電壓和電流的穩定
精度都在0.05%(滿度電流:10 A,滿度電壓:5 V)內,與傳統的化成裝置相比,節能率高達70%。從性價比來說,本文采用的方案是目前能量回饋型電池化成裝置的最佳解決方案之一。當然這種方案也存在不足,例如放電電壓不能作為負壓等問題,需要通過進一步研究,使系統更加優化。
[1] 黃海宏,張燕鋒,陳天倫.高功率因數鋰電池化成能量回饋系統[J].電子測量與儀器學報,2014,28(11):6-12.
[2] 周宏林,肖帥,楊耕.一種雙向級聯式Buck Boost逆變器的建模與分析[J].電源學報,2012(3):19-21.
[3] 張雪圓.用于電池化成設備的雙向DCDC變換器的研究[D].北京:北京交通大學,2011.
[4] 何曉妮.基于DSP的鋰電池充放電系統研究[D].廣州:華南理工大學,2011.
[5] 孫頻東.一種新型的零電壓開關雙向DC-DC變換電源[J].電氣傳動, 2005,35(6):141-144.
[6] 孫佳,吳小華,尹欣.航天電源雙向變換器的研究[J].測控技術,2005,35(8):35-38.
[7] 林杰輝,潘永雄,蘇成悅.高PF全電壓可變負載BCM單級APFC反激變換器環路設計[J].廣東工業大學學報,2016,33(3):26-31.
[8] 宋修奎,唐雄民,章云.一種適合于單相電壓型逆變電源的并聯控制方案研究[J].廣東工業大學學報,2015,32(2):79-85.
[9] JANG S J,LEE T W,LEE W C,et al.Bi direc tional DC DC converter for fuel cell generation system [J].Power Electronics Specialists Conference,2004,35(6):4722-4728.
[10]王兆安,劉進軍.電力電子技術[M].北京:機械工業出版社,2009.
[11]POON N K,BRYAN M H.A Constant-power battery charger with inherent soft switching and power factor correction[J].IEEE Transactions on Power Electronics,2003,18(6): 1262-1269.
[12]徐琢.蓄電池模擬裝置主電路的拓撲及控制研究[J].電氣傳動,2013,32(12):69-73.
[13]劉 彬,沈愛弟,高迪駒.混合動力船舶雙向DC-DC變換器的研究與設計[J].現代電子技術,2014,37(24):133-137.
[14]CARICCHI F,CRESCRIMBINI F,CAPPONI F,et al.Study of bi-directional buck-boost converter topologies for application in electrical ve-hicle motor drives[C]//Applied Power Electronics Conference and Exposition Conference,1998.
[15]PRASANNA U R,RATHORE A K.Novel zero-current-switching current-fed half-bridge isolated DC/DC converter for fuel-cell-based applications [J].IEEE Transactions on Industry Applications,2013,49(4):1658-1668.
Energy Feedback Type DC Converter Used for Battery Formation
LI Keke1,CHEN Jian2,WANG Jieyang1,ZHANG Jiantao1
(1.School of Information Engineering,Guangdong University of Technology,Guangzhou 510006,China; 2.School of Electro-Mechanical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
Prior to the first use of battery,repeated charging and discharging are needed.The effect of battery formation may greatly affect the applicative performance of battery.At present,the resistance dissipation mode is mainly adopted in major commercial available formation devices for discharging,so the energy utilization is low.Aiming at this problem,the discharging energy needs to be recovered to achieve recycling use and to improve the efficiency of energy conversion.With the battery formation device based on bi-directional DC converter,high efficient battery energy recovery can be realized and the problem of discharging energy loss can be completely avoided.The switching power supply scheme may further improve the efficiency of energy conversion.In the system,STM32F334 is adopted as the controller,the bidirectional Buck/Boost is used as the main circuit topological structure,and the fuzzy PI structure is selected to compensate the loop,thus the high precision control of the voltage and current during the charging and discharging process is realized,the control precision is up to 0.05% (FS).Comparing with the traditional formation devices,the results indicate that the energy saving rate of the energy feedback type battery formation device is up to 70%,such device will gradually become the mainstream in the market.
Electric vehicle; DC converter; Energy feedback; Battery formation; High precision; Fuzzy control
廣東省省級科技計劃基金資助項目(2014A0103027)
李科科(1990—),男,在讀碩士研究生,主要從事電力電子方向的研究。E-mail:281991401@qq.com。 陳健(通信作者),男,博士,教授,主要從事機電液控制技術的研究。E-mail:chenjian7681@163.com。
TH89;TP21
A
10.16086/j.cnki.issn1000-0380.201705006
修改稿收到日期:2016-11-24
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
