基于表面肌電非負(fù)矩陣分解與一致性的肌間協(xié)同-耦合關(guān)系研究
2017-06-01 12:20:41李欣欣楊春華楊芳梅陳曉玲吳曉光
謝 平 李欣欣 楊春華 楊芳梅 陳曉玲 吳曉光
(燕山大學(xué)電氣工程學(xué)院河北省測(cè)試計(jì)量技術(shù)及儀器重點(diǎn)實(shí)驗(yàn)室,河北 秦皇島 066004)
基于表面肌電非負(fù)矩陣分解與一致性的肌間協(xié)同-耦合關(guān)系研究
謝 平*李欣欣 楊春華 楊芳梅 陳曉玲 吳曉光
(燕山大學(xué)電氣工程學(xué)院河北省測(cè)試計(jì)量技術(shù)及儀器重點(diǎn)實(shí)驗(yàn)室,河北 秦皇島 066004)
肌肉協(xié)同模型是神經(jīng)產(chǎn)生并控制運(yùn)動(dòng)的低維度結(jié)構(gòu),探討不同動(dòng)作任務(wù)下的表面肌電信號(hào)(sEMG)間的相干性分析,可以體現(xiàn)相應(yīng)肌群的協(xié)同耦合關(guān)系,進(jìn)而能從神經(jīng)控制運(yùn)動(dòng)與肌肉相互配合協(xié)調(diào)的角度揭示運(yùn)動(dòng)產(chǎn)生與執(zhí)行規(guī)律。組織8名年輕健康受試者(男女均半、20~24歲)進(jìn)行上肢腕部屈、伸實(shí)驗(yàn),采集動(dòng)作時(shí)相應(yīng)肌群的sEMG數(shù)據(jù),引入非負(fù)矩陣分解(NMF)方法分析肌間協(xié)同性,并進(jìn)一步對(duì)協(xié)同性較高的肌群采用一致性分析方法,研究信號(hào)beta(15~35 Hz)和gamma(35~60 Hz)頻段的耦合強(qiáng)度關(guān)系,探討腕部伸屈動(dòng)作下不同受試者之間的協(xié)同-耦合性差異。結(jié)果表明:腕伸動(dòng)作下,主動(dòng)肌橈側(cè)腕短伸肌(ECR)、指伸肌(ED)、尺側(cè)腕伸肌(ECU)、肱橈肌(B)在協(xié)同模塊W5中具有協(xié)同關(guān)系,且肌間耦合強(qiáng)度顯著(P<0.05),beta頻段與gamma頻段一致性顯著面積相差較大(1.261±0.966);腕屈動(dòng)作下,分別在協(xié)同模塊W1W4W5中存在具有協(xié)同關(guān)系的肌肉對(duì),且肌肉間耦合強(qiáng)度顯著(P<0.001),在beta和gamma頻段一致性顯著面積相差較小(0.412±0.163),但主動(dòng)肌橈側(cè)腕屈肌、指淺屈肌間不具有協(xié)同性,耦合關(guān)系較弱。以上說(shuō)明:神經(jīng)控制運(yùn)動(dòng)的方式不同,體現(xiàn)為肌肉協(xié)同-耦合關(guān)系有所差異;在同一協(xié)同模塊中,協(xié)同性較高的肌肉間耦合關(guān)系較強(qiáng),揭示神經(jīng)控制運(yùn)動(dòng)規(guī)律與肌肉相互配合方式;運(yùn)用此方法進(jìn)行肌間協(xié)同-耦合聯(lián)合分析,可望深入揭示中樞神經(jīng)模塊化協(xié)同控制運(yùn)動(dòng)機(jī)制,進(jìn)一步為運(yùn)動(dòng)障礙患者功能分析和評(píng)價(jià)提供科學(xué)依據(jù)。
表面肌電;肌肉協(xié)同;肌間耦合;非負(fù)矩陣分解;一致性分析
引言
人體運(yùn)動(dòng)是一種由神經(jīng)肌肉激活和生物力學(xué)輸出產(chǎn)生的高復(fù)雜度活動(dòng)[1],在運(yùn)動(dòng)過(guò)程中,模塊化結(jié)構(gòu)常被用于解決肌肉間如何組織與協(xié)調(diào)多自由度變化的問(wèn)題[2]。這種模塊化結(jié)構(gòu)定義多塊肌肉共同作用形成激活模型,通過(guò)調(diào)節(jié)模型激活時(shí)間與強(qiáng)度來(lái)完成動(dòng)作的“搭建”[3-4],而在模型內(nèi)部肌肉間同樣存在依附與共同作用關(guān)系。因此,研究模塊化結(jié)構(gòu)中肌間關(guān)系特性,更有助于了解中樞神經(jīng)系統(tǒng)(central nervous system, CNS)控制人體運(yùn)動(dòng)的產(chǎn)生、執(zhí)行及協(xié)調(diào)方式。
中樞神經(jīng)系統(tǒng)對(duì)肌肉的模塊化分解被稱為肌肉協(xié)同分析,不僅可以對(duì)存在協(xié)同作用的肌肉進(jìn)行提取,而且能夠獲取反映肌肉激活的主要成分。針對(duì)以上特點(diǎn),因子分解方法、主成分分析方法及非負(fù)矩陣分解(nonnegative matrix factorization, NMF)方法常被用于肌肉激活模式分析[5]、姿態(tài)時(shí)空特性分析[6]、腦電的相位空間重構(gòu)[7]、能量譜特征提取[8]及腕部動(dòng)作識(shí)別[9]等方面。以上分析方法均能從不同角度揭示神經(jīng)從組織協(xié)調(diào)到運(yùn)動(dòng)執(zhí)行的規(guī)律,但因子分解方法、主成分分析方法是將多指標(biāo)轉(zhuǎn)化為少數(shù)幾個(gè)綜合指標(biāo),降低了原始數(shù)據(jù)維度,而NMF方法的目的是將數(shù)據(jù)拆解成目標(biāo)形式,且分解矩陣中所有元素均具有非負(fù)特性,使得分解形式和結(jié)果對(duì)肌肉激活具有更好的解釋性。針對(duì)多通道肌電信號(hào)數(shù)據(jù)量大的特點(diǎn),NMF方法能夠簡(jiǎn)化數(shù)據(jù)形式,對(duì)目標(biāo)信號(hào)實(shí)現(xiàn)簡(jiǎn)便、準(zhǔn)確提取,因此更適合于協(xié)同分析。
肌肉協(xié)同作用可以反映多塊肌肉的相互組合與協(xié)調(diào)關(guān)系,而兩肌肉間的相互依附與共同作用關(guān)系,即耦合關(guān)系,可以從神經(jīng)振蕩傳遞運(yùn)動(dòng)控制信息角度反映肌肉間的功能聯(lián)系[10-11]。計(jì)算肌間耦合特性的常用方法為一致性(coherence)分析方法,腕部屈伸運(yùn)動(dòng)研究發(fā)現(xiàn),在姿勢(shì)變化時(shí)肌間一致性也會(huì)相應(yīng)調(diào)整[12],運(yùn)動(dòng)過(guò)程中肌間耦合主要表現(xiàn)在beta(15~35 Hz)頻段和gamma(35~60 Hz)頻段[13],beta頻段的肌間耦合代表了從初級(jí)運(yùn)動(dòng)皮層到運(yùn)動(dòng)神經(jīng)元的傳遞過(guò)程,而gamma頻段振蕩體現(xiàn)與認(rèn)知功能相關(guān)的腦皮層信息整合過(guò)程[14],各頻段的肌間耦合分析為理解運(yùn)動(dòng)控制過(guò)程的組織與協(xié)調(diào)提供了理論基礎(chǔ)。
過(guò)去研究側(cè)重于單獨(dú)的肌肉協(xié)同或肌間耦合分析,在神經(jīng)控制運(yùn)動(dòng)方式[1]、肌肉間相互作用關(guān)系[13]以及神經(jīng)通路與生物力學(xué)之間的相互影響[4]等方面分別做出闡述。肌肉協(xié)同的模塊化結(jié)構(gòu)是多塊肌肉表達(dá)運(yùn)動(dòng)過(guò)程與運(yùn)動(dòng)目的方式,可以深入觀察CNS生成的控制結(jié)構(gòu),D’Avella等早期研究發(fā)現(xiàn),協(xié)同作用是肌肉多自由度問(wèn)題的解決方案[2],對(duì)于運(yùn)動(dòng)控制來(lái)說(shuō),CNS只需要控制較少的模塊變量,就可控制眾多的運(yùn)動(dòng)單元和肌肉。肌間耦合可在頻段上分析協(xié)同模塊的關(guān)聯(lián)程度,并與生物力學(xué)運(yùn)動(dòng)相關(guān)聯(lián)。肌間協(xié)同與耦合綜合分析,可以從神經(jīng)控制層面上探究肌間功能耦合關(guān)系與肌肉激活模型的關(guān)聯(lián)程度,近期研究AMarchis C D等發(fā)現(xiàn),下肢肌肉協(xié)同模塊中部分肌肉間存在耦合關(guān)系[3],在神經(jīng)控制方面具有相互聯(lián)系,僅發(fā)現(xiàn)肌間耦合在gamma頻段中存在重要影響,對(duì)于肌肉協(xié)同性與肌間耦合特性之間具體關(guān)聯(lián)關(guān)系并沒(méi)有詳盡闡述。
為進(jìn)一步探索上肢不同運(yùn)動(dòng)下神經(jīng)控制及運(yùn)動(dòng)協(xié)調(diào)機(jī)制,針對(duì)多通道表面肌電信號(hào)(surface electromyography, sEMG)的神經(jīng)控制規(guī)律特性,探討肌肉協(xié)同方式、肌間耦合強(qiáng)度及各頻段上耦合強(qiáng)度差異性,本研究提出非負(fù)矩陣分解-一致性方法用于研究人體上肢腕部屈伸動(dòng)作下肌間協(xié)同-耦合關(guān)系,從神經(jīng)控制運(yùn)動(dòng)與肌肉相互配合協(xié)調(diào)的角度聯(lián)合揭示運(yùn)動(dòng)的產(chǎn)生與執(zhí)行規(guī)律,為深入分析人體運(yùn)動(dòng)的協(xié)調(diào)機(jī)制和控制規(guī)律提供研究方法和依據(jù),為研究神經(jīng)控制運(yùn)動(dòng)機(jī)理打下了基礎(chǔ)。
1 實(shí)驗(yàn)數(shù)據(jù)采集及預(yù)處理
1.1 實(shí)驗(yàn)數(shù)據(jù)采集
受試者為8名(男4名,女4名)無(wú)上肢運(yùn)動(dòng)功能障礙或關(guān)節(jié)損傷歷史的健康人。年齡20~24歲,體重47~75 kg,身高160~178 cm,均為右利手,無(wú)神經(jīng)肌肉障礙[15]。所有受試者均自愿參加此測(cè)試,受試前24 h內(nèi)未作劇烈運(yùn)動(dòng),排除運(yùn)動(dòng)疲勞的影響。
sEMG采集采用DELSYS公司的表面肌電采集裝置。實(shí)驗(yàn)記錄兩種腕部基本動(dòng)作方式,即腕伸(wrist extension, WE)與腕屈(wrist flexion, WF)。sEMG信號(hào)采集帶寬為5~450 Hz,采樣頻率為2 000 Hz。采用四點(diǎn)式銀條采集表面肌電信號(hào),電極順著肌纖維方向粘貼。采集前先用酒精擦拭被測(cè)部位,去除皮膚表面油脂和皮屑。上臂支架,支撐上肢與身體成90°,如圖1(a)所示。設(shè)備只允許前臂關(guān)節(jié)運(yùn)動(dòng)并約束肩膀來(lái)回?fù)u擺,防止手臂疲勞對(duì)實(shí)驗(yàn)產(chǎn)生影響,對(duì)腕部運(yùn)動(dòng)沒(méi)有任何輔助或阻力。在計(jì)算機(jī)上顯示目標(biāo)圖像,以最大程度完成動(dòng)作,初始狀態(tài)和間歇狀態(tài)均保持前臂放松。
同步采集右側(cè)上肢8塊肌肉sEMG信號(hào),分別為指淺屈肌(flexor digitorum superficialis, FDS)、指伸肌(extensor digitorum, ED)、肱橈肌(brachioradialis, B)、橈側(cè)腕屈肌(flexor carpi radialis, FCR)、掌長(zhǎng)肌(palmarislongus, PL)、橈側(cè)腕短伸肌(extensor carpi radialis, ECR)、尺側(cè)腕伸肌(extensor carpi ulnaris, ECU)和肱二頭肌(biceps brachii, BB),采集位置如圖1(b)所示。
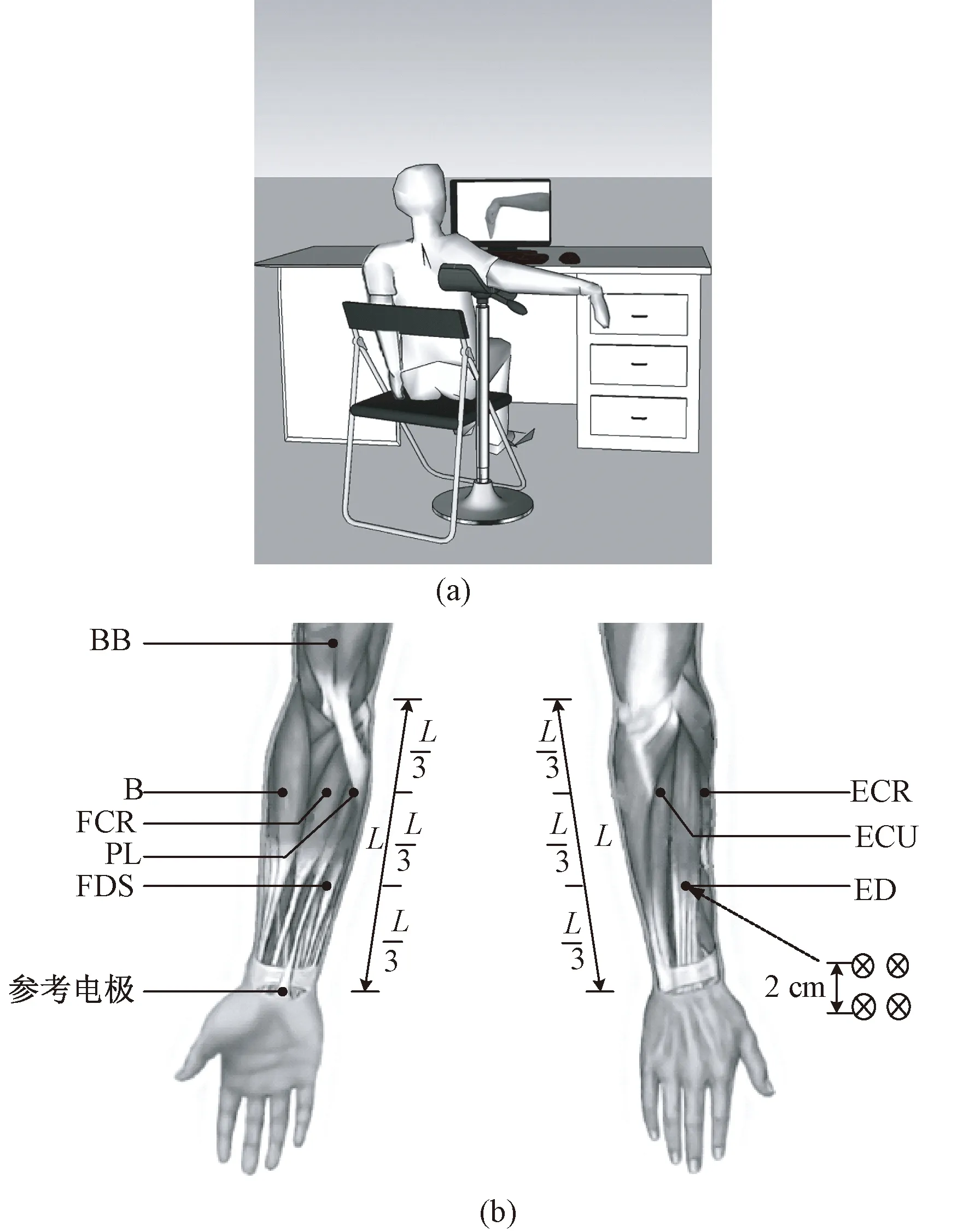
圖1 上肢表面肌電信號(hào)采集實(shí)驗(yàn)。(a) 上肢擺位與腕部運(yùn)動(dòng);(b) 腕部屈伸運(yùn)動(dòng)相關(guān)肌肉與表面肌電采集位置Fig.1 Experimental on sEMG signal acquisition of upper limbs. (a) Upper limb position and wrist motion; (b) Wrist flexion - extension related muscle and sEMG signal acquisition position
1.2 肌電信號(hào)預(yù)處理
根據(jù)動(dòng)作演示(見(jiàn)圖1),設(shè)置動(dòng)作圖片顯示時(shí)間為4 s,動(dòng)作切換間歇時(shí)間為3 s。在處理數(shù)據(jù)過(guò)程中,去除有效數(shù)據(jù)中的前0.5 s與后0.5 s,保證在中間過(guò)程中手腕保持靜止。為了更好地分析數(shù)據(jù),獲得有效的sEMG信號(hào)特征,需對(duì)原始信號(hào)進(jìn)行預(yù)處理。首先,對(duì)信號(hào)做去均值處理,并用于一致性分析,以避免帶通處理對(duì)信號(hào)造成影響,保證低頻波段的真實(shí)有效性[16-17];然后,進(jìn)行低通與高通濾波(截止頻率為4、200 Hz),整流后提取信號(hào)包絡(luò);最后,對(duì)處理后的信號(hào)進(jìn)行最大值歸一化,用于肌肉協(xié)同分析。
1.3 非負(fù)矩陣分解-一致性分析方法
為研究協(xié)同肌肉間耦合特性,本研究提出非負(fù)矩陣分解-一致性分析方法應(yīng)用于上肢腕部屈伸動(dòng)作的肌電信號(hào)分析中。先應(yīng)用非負(fù)矩陣分解方法來(lái)確定肌肉協(xié)同結(jié)構(gòu),得到協(xié)同性較強(qiáng)的肌肉對(duì),并結(jié)合一致性方法計(jì)算協(xié)同性肌肉間的耦合強(qiáng)度。
1.3.1 基于非負(fù)矩陣分解的肌肉協(xié)同分析
針對(duì)肌肉激活模式中的非負(fù)與模塊化的概念,采用非負(fù)矩陣分解(NMF)算法[18]提取肌肉協(xié)同。NMF通過(guò)發(fā)掘數(shù)據(jù)之間的內(nèi)在關(guān)系獲得映射矩陣,再把高維數(shù)據(jù)投影到低維子空間中,從而達(dá)到聚類、降維等目的。NMF算法的形式為
(1)
式中:Wiα為基矩陣,Hαμ為系數(shù)矩陣,n為基矩陣分解列數(shù);原矩陣Viμ的列向量可以解釋為Hαμ中所有列向量的加權(quán)和,而權(quán)重系數(shù)為Wiα中對(duì)應(yīng)列向量中的元素。

基于非負(fù)矩陣分解方法對(duì)肌電信號(hào)建立肌肉協(xié)同模型,如圖2所示。具體過(guò)程如下,構(gòu)建三通道肌電原始信號(hào)矩陣Viμ,其中i=3為信號(hào)個(gè)數(shù),μ為0.5s時(shí)間內(nèi)的采樣點(diǎn)數(shù),如圖2(a)所示,當(dāng)分解列數(shù)n=2時(shí),分解得到肌肉協(xié)同矩陣W32、激活尺度系數(shù)矩陣H2μ,如圖2(b)所示。并對(duì)兩個(gè)分解矩陣進(jìn)行重構(gòu),得到重構(gòu)矩陣V′iμ,如圖2(c)所示。
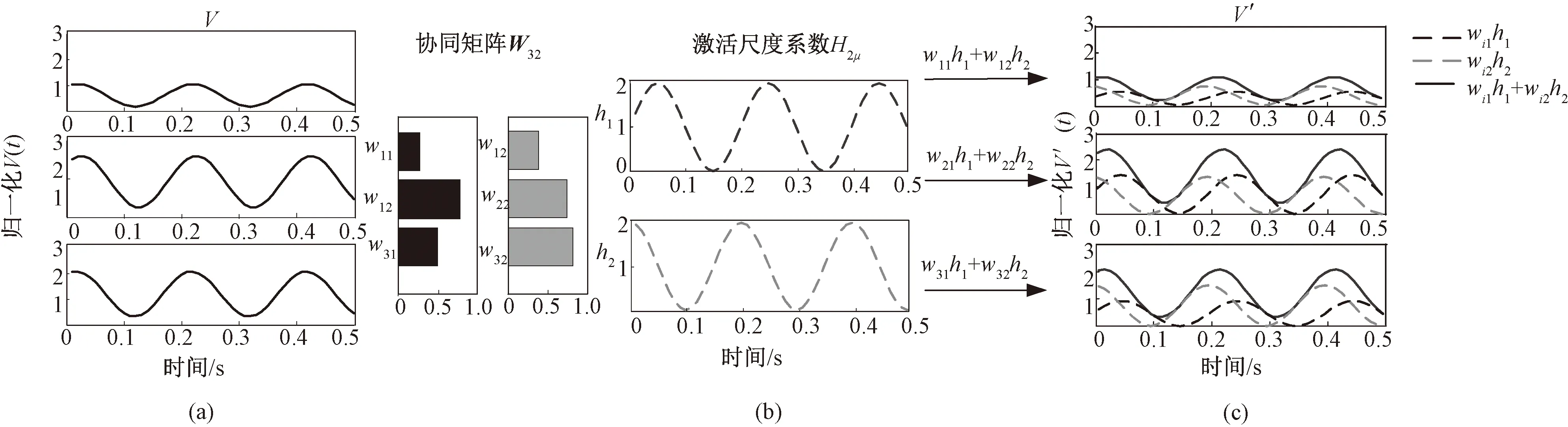
圖2 基于非負(fù)矩陣分解方法的肌肉協(xié)同模型。(a) 模擬肌電信號(hào)模型;(b) 協(xié)同模型;(c) 肌電重構(gòu)模型Fig.2 The synergy model of muscles based on the nonnegative matrix factorization method. (a) Simulated sEMG signal model; (b) Synergy model; (c) sEMG reconstruction model
為確定上述分解過(guò)程中肌肉協(xié)同矩陣列數(shù)n,即基矩陣分解列數(shù),運(yùn)用解釋方差(variabilityaccountedfor,VAF)[19]計(jì)算方法,定義如下:
(2)
式中,RSS為殘差平方和(residualsumofsquares,RSS),TSS為總平方和(totalsumofsquares,TSS),Viμ是原始肌肉激活模式矩陣,V′iμ是NMF算法重構(gòu)后的數(shù)據(jù)矩陣。
經(jīng)過(guò)不斷迭代計(jì)算,通過(guò)VAF值來(lái)判斷分解模型準(zhǔn)確程度,在n較小情況下,VAF值較低,此時(shí)的分解模型僅涵蓋原始信號(hào)部分有用信息,Clark等[20]研究發(fā)現(xiàn),當(dāng)分解模塊數(shù)少時(shí),其分解出的模塊是許多模塊的疊加,且不足以表現(xiàn)原始信號(hào)信息。認(rèn)為當(dāng)VAF值大于92%,且隨著n值的增加VAF增加小于2%時(shí),此時(shí)n為有效分解列數(shù)。為更好地表現(xiàn)重構(gòu)信號(hào)的細(xì)節(jié),對(duì)原始信號(hào)有用信息盡量保留,當(dāng)協(xié)同模塊數(shù)目為n=5,滿足上述條件,從而確定協(xié)同結(jié)構(gòu)。
1.3.2 基于一致性分析方法的協(xié)同肌肉耦合強(qiáng)度分析
根據(jù)本文第1.3.1節(jié)非負(fù)矩陣分解方法得到的肌肉協(xié)同模式,對(duì)協(xié)同性較強(qiáng)的肌肉對(duì)進(jìn)行耦合強(qiáng)度分析。兩肌電信號(hào)x、y在頻率λ處的Coherence計(jì)算公式為
(3)

信號(hào)間一致性程度可用顯著一致性閾值S描述[21],計(jì)算公式為
(4)
式中:n表示參與譜估計(jì)的數(shù)據(jù)段數(shù)目;α為置信水平(α=0.95),超過(guò)顯著性閾值P<α?xí)r兩肌電相干顯著。
為了比較組間一致性,本研究提出一致性面積指標(biāo)AC,即一致性曲線與一致性閾值S之間區(qū)域面積,用來(lái)描述各頻段不同受試者之間的統(tǒng)計(jì)差異,有
(5)
式中:Δλ表示頻率分辨率;AC的數(shù)值越大,表示協(xié)同性肌肉間耦合強(qiáng)度越高。
2 結(jié)果
在不同的運(yùn)動(dòng)狀態(tài)下,肌肉協(xié)調(diào)與激活方式有所不同,所以對(duì)腕屈腕伸動(dòng)作下肌肉進(jìn)行協(xié)同-耦合分析,即采用本文第1.3.1與1.3.2節(jié)中非負(fù)矩陣分解-一致性方法,分析本文第1.1節(jié)采集并經(jīng)過(guò)本文第1.2節(jié)預(yù)處理后的肌電信號(hào)。
2.1 腕伸(WE)動(dòng)作下肌肉協(xié)同-耦合分析
提取腕伸動(dòng)作肌電活動(dòng)段數(shù)據(jù),并進(jìn)行協(xié)同肌肉間的耦合強(qiáng)度分析,得到腕伸動(dòng)作的分解協(xié)同模塊與激活尺度系數(shù)關(guān)系(見(jiàn)圖3(a)),對(duì)具有協(xié)同作用的肌肉對(duì)進(jìn)行一致性分析得到曲線(見(jiàn)圖4(a)),并對(duì)非協(xié)同性肌肉對(duì)進(jìn)行一致性分析得到曲線(見(jiàn)圖4(b))。
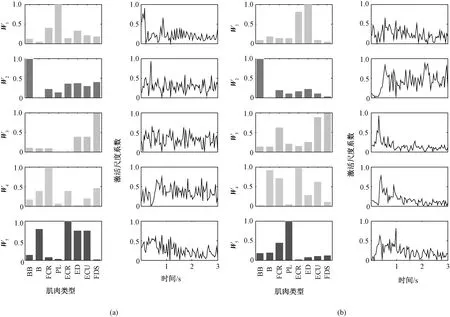
圖3 各動(dòng)作下的平均肌肉協(xié)同模型(左列為協(xié)同模型,右列為激活尺度系數(shù))。(a)腕伸動(dòng)作;(b) 腕屈動(dòng)作Fig.3 The average synergy model of under each movement (The left column is the synergy model and the right column is the activation scale factor). (a) Synergy model of wrist extension; (b) Synergy model of wrist flexion
由圖3(a)可見(jiàn),在腕伸動(dòng)作下,ECR(橈側(cè)腕長(zhǎng)伸肌)、ED(指伸肌)、ECU(尺側(cè)腕伸肌)、B(肱橈肌)在協(xié)同模塊W5中具有協(xié)同關(guān)系,其他模塊中肌肉間協(xié)同關(guān)系不明顯。為了更好地對(duì)比觀察協(xié)同性肌肉于非協(xié)同肌肉的一致性關(guān)系,筆者選擇6塊不具有協(xié)同性的肌肉進(jìn)行對(duì)比分析。具有協(xié)同性的肌肉一致性分析如圖4(a)所示,不具有協(xié)同性的肌肉對(duì)一致性分析如圖4(b)所示。由圖可見(jiàn),具有協(xié)同性的肌肉耦合強(qiáng)度較強(qiáng),而不具有協(xié)同性的肌肉其一致性曲線僅在顯著性閾值左右變化。

圖4 腕伸WE動(dòng)作下肌間一致性。(a)具有協(xié)同性肌肉間一致性;(b)非協(xié)同性肌肉間一致性Fig.4 Intramuscular coherence in wrist extension movement. (a)Coherence between strong synergy muscles; (b)Coherence between uncooperative muscles
對(duì)上述一致性分析結(jié)果,利用顯著性面積公式(見(jiàn)式(5)),計(jì)算所有被測(cè)者alpha(8~15Hz)、beta(15~35Hz)、gamma(35~60Hz)頻段的顯著性面積AC。WE動(dòng)作下,圖4(a)中所有協(xié)同性肌肉對(duì)與圖4(b)中非協(xié)同肌肉對(duì)平均顯著性面積比較如表1所示。可見(jiàn),協(xié)同性肌肉與非協(xié)同性肌肉間的組間顯著性水平P<0.05,因此可認(rèn)為協(xié)同性與否對(duì)肌間一致性在各頻段的顯著性面積有顯著影響,置信度為95%。協(xié)同性肌肉一致性顯著面積在beta頻段與gamma頻段相差為1.261±0.966,在gamma頻段顯著性更明顯。
表1 WE動(dòng)作下協(xié)同關(guān)系的顯著性面積比較
Tab.1 The significant area of synergistic function measures ANOVA of WE movement
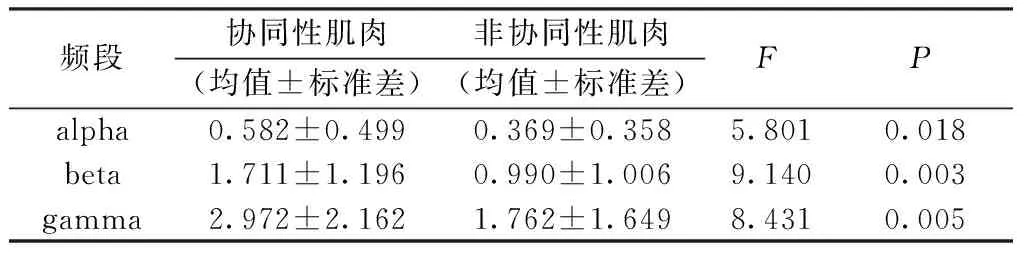
頻段協(xié)同性肌肉非協(xié)同性肌肉(均值±標(biāo)準(zhǔn)差)(均值±標(biāo)準(zhǔn)差)FPalpha0.582±0.4990.369±0.3585.8010.018beta1.711±1.1960.990±1.0069.1400.003gamma2.972±2.1621.762±1.6498.4310.005
2.2 腕屈(WF)動(dòng)作下肌肉協(xié)同-耦合分析
同樣,與本文第2.1節(jié)相似,得到分解協(xié)同模塊與激活尺度系數(shù)關(guān)系(見(jiàn)圖3(b))和具有協(xié)同性的肌間一致性分析曲線(見(jiàn)圖5(a)),以及不具有協(xié)同性的肌肉的肌間一致性分析曲線(見(jiàn)圖5(b))。
由圖3(b)可見(jiàn),在腕屈動(dòng)作下,W1模塊中具有協(xié)同性的肌肉為ED-ECR;W4模塊中有ECR-B、B-FCR、FCR-ECU、B-ECU,W5模塊中有FCR-PL。觀察圖5(a)、(b)可見(jiàn),具有協(xié)同性的肌肉,肌間耦合強(qiáng)度較強(qiáng),而非協(xié)同性肌肉,肌間耦合強(qiáng)度相對(duì)較弱。
同樣,利用顯著性面積公式(見(jiàn)式(5)),計(jì)算所有被測(cè)者alpha、beta、gamma頻段的顯著性面積AC。WF動(dòng)作下,圖5(a)中所有協(xié)同性肌肉對(duì)與圖5(b)中非協(xié)同肌肉對(duì)的顯著性面積比較如表2所示。
表2 WF動(dòng)作下協(xié)同關(guān)系的顯著性面積比較
Tab.2 The significant area of synergistic function measures ANOVA of WF movement
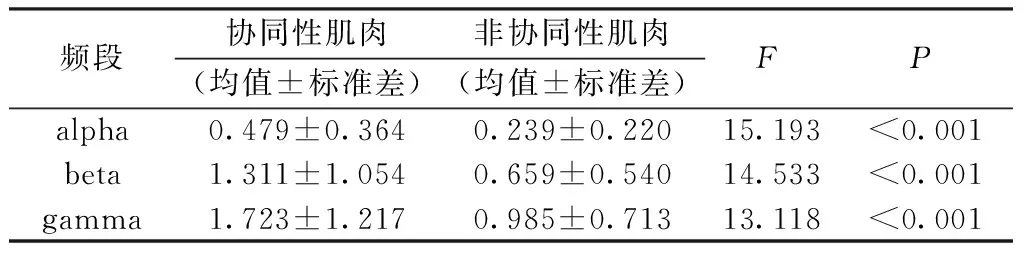
頻段協(xié)同性肌肉非協(xié)同性肌肉(均值±標(biāo)準(zhǔn)差)(均值±標(biāo)準(zhǔn)差)FPalpha0.479±0.3640.239±0.22015.193<0.001beta1.311±1.0540.659±0.54014.533<0.001gamma1.723±1.2170.985±0.71313.118<0.001
由表2可見(jiàn),協(xié)同性肌肉與非協(xié)同性肌肉間的組間顯著性水平P<0.001為極顯著統(tǒng)計(jì)差異性,因此可以認(rèn)為協(xié)同性與否對(duì)肌間一致性在各頻段的顯著性面積有顯著影響。協(xié)同性肌肉一致性顯著面積在beta頻段與gamma頻段相差為0.412±0.163,在beta與gamma頻段顯著性差異不明顯。
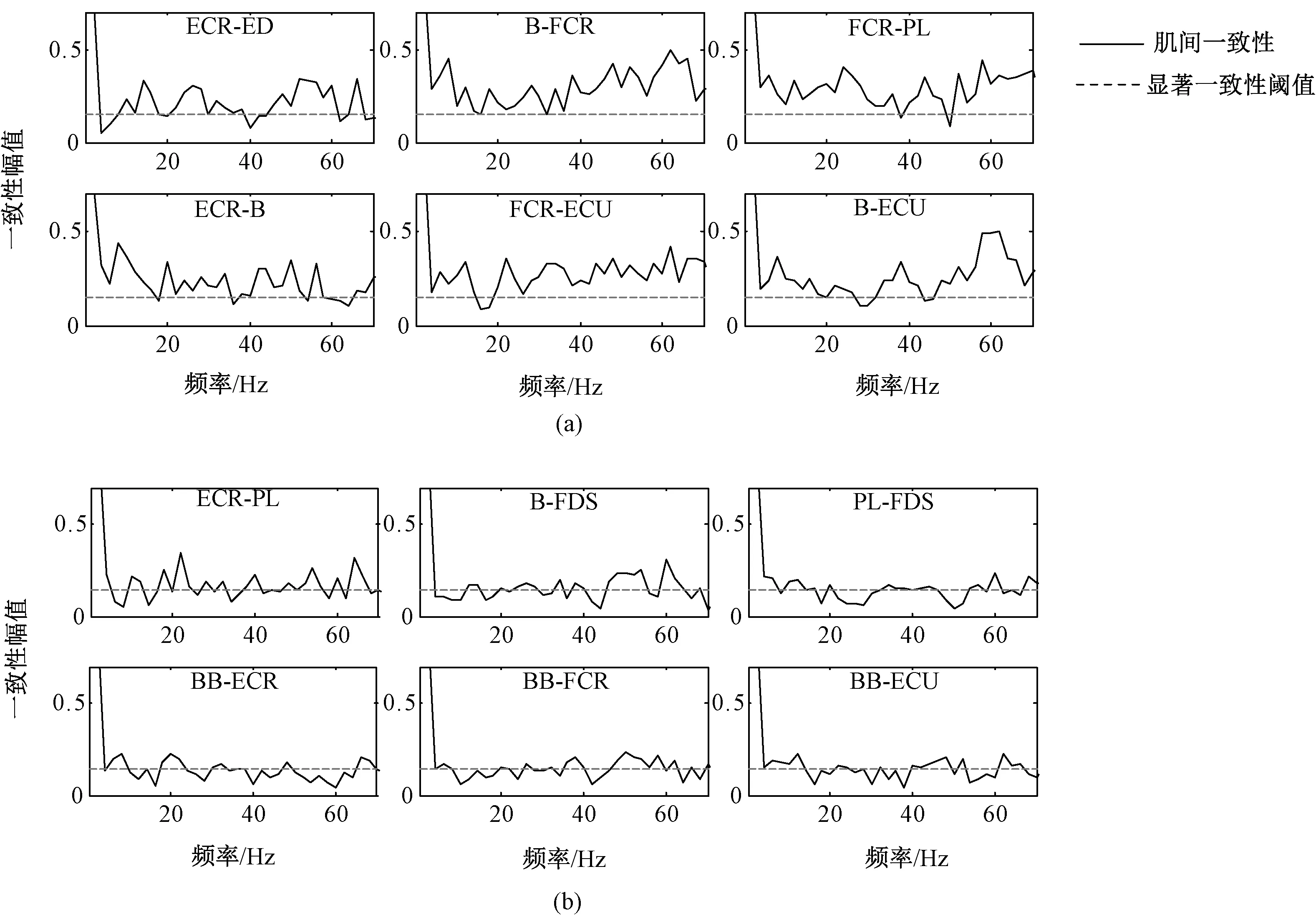
圖5 腕屈WF動(dòng)作下肌間一致性。(a)具有協(xié)同性肌肉間一致性;(b)非協(xié)同性肌肉間一致性Fig.5 Intramuscular coherence in wrist flexion movement. (a)Coherence between strong synergy muscles; (b)Coherence between uncooperative muscles
3 討論與結(jié)論
從上肢擺位與腕部運(yùn)動(dòng)示意圖1(a)中可看出,肱二頭肌作用為支撐前臂,與其他肌肉功能有所不同,圖3中腕屈與腕伸動(dòng)作的共享協(xié)同模塊W2中肱二頭肌比重最高,其他肌肉相對(duì)較低,從而印證協(xié)同模塊分解能夠?qū)⒐餐饔眉∪簞澐殖鰜?lái),對(duì)中樞神經(jīng)系統(tǒng)模塊化控制肢體運(yùn)動(dòng)的假設(shè)提供依據(jù)。
從上述兩種動(dòng)作下的肌間協(xié)同-耦合分析結(jié)果可見(jiàn):腕屈與腕伸動(dòng)作下都具有其特殊的協(xié)同模塊,并與共享協(xié)同模塊W2共同作用,從而產(chǎn)生靈活多樣的運(yùn)動(dòng)方式。在腕伸(WE)動(dòng)作下,主動(dòng)肌主要為ECR(橈側(cè)腕長(zhǎng)伸肌)、ED(指伸肌)、ECU(尺側(cè)腕伸肌),如圖3(a)所示,在W5模塊中,上述肌肉所占比重較高,相互間具有協(xié)同性,產(chǎn)生共同作用,且根據(jù)圖4(a)中上述肌肉兩兩間存在耦合關(guān)系,表明該動(dòng)作下CNS是通過(guò)相同的神經(jīng)元信息來(lái)控制伸肌完成動(dòng)作。在腕屈(WF)動(dòng)作下,主動(dòng)肌主要為FCR(橈側(cè)腕屈肌)、FDS(指淺屈肌),如圖3(b)所示。未在分解模塊中發(fā)現(xiàn)上述肌肉同時(shí)比重較高地分布在同一模塊中,肌肉之間不具有協(xié)同性,且根據(jù)圖4(b)中上述肌肉間耦合強(qiáng)度相對(duì)較低,表明該動(dòng)作下神經(jīng)控制屈肌通過(guò)單獨(dú)指令完成,以避免出現(xiàn)肌肉間混連發(fā)生。由此可知,在不同動(dòng)作下,神經(jīng)控制運(yùn)動(dòng)的編碼方式有所不同,使得肌肉間形成不同的組合方式,并通過(guò)肌肉間相互配合協(xié)調(diào),從而形成不同動(dòng)作[4]。
進(jìn)一步發(fā)現(xiàn),在同一模塊中具有協(xié)同性的肌肉對(duì)的肌間耦合強(qiáng)度明顯高于非協(xié)同性肌肉(見(jiàn)圖4、5),主要表現(xiàn)在beta頻段與gamma頻段中(見(jiàn)表1、2)。神經(jīng)控制運(yùn)動(dòng)的神經(jīng)元傳遞信息大部分存在beta頻段[18,23-24]。在腕伸(WE)動(dòng)作下,beta頻段與gamma頻段顯著性面積AC均值相差較大。研究發(fā)現(xiàn):在適中的肌力輸出情況下,肌間耦合強(qiáng)度會(huì)在beta頻段明顯增強(qiáng);在較大肌力輸出時(shí),同步頻率會(huì)向高頻移動(dòng),出現(xiàn)在gamma頻段[10]。在執(zhí)行腕伸動(dòng)作時(shí),比腕屈動(dòng)作需更大的肌力輸出,其肌間耦合強(qiáng)度在gamma頻段較強(qiáng)。Marchis等研究同樣發(fā)現(xiàn),在gamma頻段中存在肌間耦合關(guān)系[3],其可能與力量的增大與維持有關(guān)。
綜上所述,本研究將非負(fù)矩陣分解和肌間一致性分析方法相結(jié)合,應(yīng)用于上肢不同動(dòng)作下的表面肌電信號(hào)分析,不僅可以有效分解具有協(xié)同關(guān)系的活動(dòng)肌群,也可進(jìn)一步得到肌群內(nèi)部肌肉間的協(xié)同-耦合關(guān)系,為探究神經(jīng)控制運(yùn)動(dòng)的肌肉協(xié)調(diào)與分工協(xié)作方式提供研究方法和依據(jù)。結(jié)果表明,在上肢屈伸動(dòng)作下,肌肉協(xié)同方式體現(xiàn)為具有相似功能的模塊,且協(xié)同性強(qiáng)的肌肉間耦合關(guān)系較強(qiáng),主要表現(xiàn)在beta頻段與gamma頻段。筆者關(guān)于肌間協(xié)同-耦合關(guān)系的研究,驗(yàn)證了中樞神經(jīng)系統(tǒng)的模塊化控制假設(shè),并從神經(jīng)控制運(yùn)動(dòng)與肌肉相互配合協(xié)調(diào)的角度聯(lián)合揭示運(yùn)動(dòng)的產(chǎn)生與執(zhí)行規(guī)律,為深入研究神經(jīng)控制運(yùn)動(dòng)機(jī)理提供了依據(jù),也對(duì)運(yùn)動(dòng)功能定量分析和評(píng)價(jià)提供了新方法。
(致謝:感謝實(shí)驗(yàn)工作人員劉歡、邱石在研究工作中給予支持。)
[1] Gottlieb GL. Muscle activation patterns during two types of voluntary single-joint movement [J]. Journal of Neurophysiology, 1998, 80(4): 1860-1867.
[2] D’Avella A, Tresch M. Muscle Synergies for Motor Control [M]// Handbook of Neural Engineering. Hoboken: MA kay wiley, 2006: 449-465.
[3] Marchis CD, Severini G, Castronovo A M, et al. Intermuscular coherence contributions in synergistic muscles during pedaling [J]. Experimental Brain Research, 2015, 233(6): 1907-1919.
[4] Geyer H, Herr H. A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities [J]. IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2010, 18(3): 263-273.
[5] Russo M, Dandola M, Portone A, et al. Dimensionality of joint torques and muscle patterns for reaching [J]. Frontiers in Computational Neuroscience, 2014, 8(3): 24.
[6] Tresch MC, Jarc A. The case for and against muscle synergies [J]. Current Opinion in Neurobiology, 2009, 19(6): 601-607.
[7] Ivanenko YP, Poppele RE, Lacquaniti F. Five basic muscle activation patterns account for muscle activity during human locomotion [J]. The Journal of Physiology, 2004, 556(1): 267-282.
[8] Torresoviedo G, Ting LH. Muscle synergies characterizing human postural responses [J]. Journal of Neurophysiology, 2007, 98(4): 2144-2156.
[9] 張啟忠,席旭剛,馬玉良,等. 基于表面肌電信號(hào)的手腕動(dòng)作模式識(shí)別 [J]. 中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào), 2013, 32(3): 257-265.
[10] d’Avella A, Portone A, Fernandez L, et al. Control of fast-reaching movements by muscle synergy combinations [J]. The Journal of Neuroscience, 2006, 26(30): 7791-7810.
[11] De MC, Castronovo AM, Bibbo D, et al. Muscle synergies are consistent when pedaling under different biomechanical demands [C]// International Conference of the IEEE Engineering in Medicine & Biology Society. Conf Proc IEEE Eng Med Biol Soc, 2012: 3308-3311.
[12] Keenan KG, Massey WV, Walters TJ, et al. Sensitivity of EMG-EMG coherence to detect the common oscillatory drive to hand muscles in young and older adults [J]. Journal of Neurophysiology, 2012, 107(10): 2866-2875.
[13] Jesunathadas M, Laitano J, Hamm TM, et al. Across-muscle coherence is modulated as a function of wrist posture during two-digit grasping [J]. Neuroscience Letters, 2013, 553(8): 68-71.
[14] 謝平,宋妍,郭子暉,等. 中風(fēng)康復(fù)運(yùn)動(dòng)中肌肉異常耦合分析 [J]. 生物醫(yī)學(xué)工程學(xué)雜志, 2016, 33(2): 244-254.
[15] Patino L, Omlor W, Chakarov V, et al. Absence of gamma-range corticomuscular coherence during dynamic force in a deafferented patient [J]. Journal of Neurophysiology, 2008, 99(4): 1906-1916.
[16] Ting LH, Mckay JL. Neuromechanics of muscle synergies for posture and movement [J]. Current Opinion in Neurobiology, 2007, 17(6): 622-628.
[17] Lee DD, Seung HS. Learning the parts of objects by non-negative matrix factorization [J]. Nature, 1999, 401(6755): 788-791.
[18] Gopalakrishnan A, Modenese L, Phillips AT. A novel computational framework for deducing muscle synergies from experimental joint moments [J]. Frontiers in Computational Neuroscience, 2014, 8: 153.
[19] Kattla S, Lowery MM. Fatigue related changes in electromyographic coherence between synergistic hand muscles [J]. Experimental Brain Research, 2010, 202(1): 89-99.
[20] Brach P, Alessander DS, Mark J, et al. Force-independent distribution of correlated neural inputs to hand muscles during three-digit grasping [J]. Journal of Neurophysiology, 2010, 104(2): 1141-1154.
[21] Clark DJ, Ting LH, Zajac FE, et al. Merging of healthy motor modules predicts reduced locomotor performance and muscle coordination complexity post-stroke [J]. Journal of Neurophysiology, 2010, 103(2): 844-857.
[22] Fisher KM, Zaaimi B, Williams TL, et al. Beta-band intermuscular coherence: a novel biomarker of upper motor neuron dysfunction in motor neuron disease [J]. Brain A Journal of Neurology, 2012, 135(9): 2849-2864.
[23] Farmer SF, Swash M, Ingram DA, et al. Changes in motor unit synchronization following central nervous lesions in man [J]. Journal of Physiology, 1993, 463(12): 3364-3377.
[24] Norton JA, Wood DE, Marsden JF, et al. Spinally generated electromyographic oscillations and spasms in a low-thoracic complete paraplegic [J]. Movement Disorders, 2003, 18(1): 101-106.
Research on the Intermuscular Synergy and Coupling Analysis Based on Surface EMG Nonnegative Matrix Factorization-Coherence
Xie Ping*Li Xinxin Yang Chunhua Yang Fangmei Chen Xiaoling Wu Xiaoguang
(KeyLabofMeasurementTechnologyandInstrumentationofHebeiProvince,YanshanUniversity,Qinhuangdao066004,Hebei,China)
The muscle synergy model is a low-dimensional structure in which nerves produce and control motion. The aim of this work was to study whether the coherence of surface electromyography could reflect the synergy-coupling relationship of the muscle groups under different movements and reveal the laws of movement generation and execution from the point of neural control and muscle coordination. In this study, we chose eight young healthy subjects (4 men and 4 women, 20~24 years old) to perform the upper limb wrist flexion and extension experiments, the sEMG data from different muscle groups were collected during the action. This study analyzed synergy between muscles by nonnegative matrix factorization. The coherence analysis method was used to study intermuscular coupling relationship in the beta (15~35 Hz) and gamma (35~60 Hz) band with the signals of high synergy muscles, and the differences of synergy-coupling between different subjects under wrist flexion and extension were investigated. Results showed that active muscles of extensor carpi radialis (ECR), extensor digitorum (ED), extensor carpi ulnaris (ECU) and brachioradialis (B) had synergistic relationship in synergy modelW5under the wrist extension movement, the intensity of intermuscular coupling was significantly different (P<0.05), and there was a significant difference in the value of coherence area between beta and gamma band (1.261±0.966). In the wrist flexion movement, intermuscular synergy appeared in synergy modelsW1W4W5, the intensity of intermuscular coupling was significantly different (P<0.001), and there was a nuance in the value of coherence area between beta and gamma band (0.412±0.163), active muscles of flexor carpi radialis (FCR) and flexor digitorum superficialis (FDS) had no synergistic relationship, the intermuscular coupling relationship was small. Taken above together, there were differences in the neural control action, which showed the different intermuscular synergy-coupling relationship. In the same synergy model, the intermuscular coupling relationship with high synergism was stronger. It revealed the law of the neural control action and muscle interaction with each other. The proposed method was expected to be applied in the future to reveal the central nervous system of modular synergistic control mechanism of movement, and to provide scientific basis for functional analysis and evaluation of patients with movement disorders.
sEMG; muscle synergy; intermuscular coupling; nonnegative matrix factorization; coherence analysis
10.3969/j.issn.0258-8021. 2017. 02.004
2016-07-27, 錄用日期:2016-11-05
國(guó)家自然科學(xué)基金(61271142,61503325);河北省自然科學(xué)基金(F2015203372)
R318
A
0258-8021(2017) 02-0150-08
*通信作者(Corresponding author),E-mail: pingx@ysu.edu.cn
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學(xué)問(wèn)題(2021年4期)2021-11-05 07:02:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
動(dòng)漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文周刊·小學(xué)一年級(jí)版(2016年28期)2017-06-03 00:28:49
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
中國(guó)公共安全(2017年11期)2017-02-06 05:28:08