中國50th人體小腿有限元模型多工況優化建模方法
2017-06-01 12:20:41張冠軍王龍亮鄧小朋杜現平官鳳嬌
中國生物醫學工程學報 2017年2期
張冠軍 王龍亮 鄧小朋 杜現平 官鳳嬌
1(湖南大學汽車車身先進設計制造國家重點實驗室,長沙 410082)2(國防科學技術大學裝備綜合保障技術重點實驗室, 長沙 410073)
中國50th人體小腿有限元模型多工況優化建模方法
張冠軍1王龍亮1鄧小朋1杜現平1官鳳嬌2*
1(湖南大學汽車車身先進設計制造國家重點實驗室,長沙 410082)2(國防科學技術大學裝備綜合保障技術重點實驗室, 長沙 410073)
人體下肢是交通事故中最易受傷的部位之一,下肢有限元模型則成為研究下肢損傷機理和防護方法的重要工具,而要保證模型生物逼真度則需開展多工況全面驗證。人體模型驗證所需的生物力學試驗數據由于樣本尺寸、材料等多樣性造成力學響應存在差異,難于用一個模型同時滿足多個試驗數據。中國人體與歐美人體在幾何尺寸上的差異會造成生物力學響應的不同,因此有必要開發中國人體的有限元模型。通過CT、MRI掃描建立小腿幾何模型,利用由脛骨關鍵尺寸確定的縮放系數,將小腿幾何模型縮放至中國50百分位人體小腿。同樣采用縮放方法,將生物力學試驗數據縮放至小腿尺寸所對應的生物力學響應數據,以解決試驗樣本幾何差異的影響。以脛骨和腓骨的彈性模量、應力-應變曲線、失效應變以及肉體體積模量為設計變量,采用優化方法,同時擬合脛骨和腓骨在準靜態、動態載荷下不同加載位置的生物力學響應,以及小腿動態載荷下不同加載位置的生物力學響應,解決試驗樣本多樣性造成的模型驗證難題。當脛骨和腓骨皮質骨彈性模量分別取18.43和18.23 GPa、失效應變分別取1.2%和0.8%、小腿肉體體積模量取11.33 MPa時,所建小腿模型能夠較好地同時滿足多組試驗中樣本的生物力學響應,表明基于優化的多工況人體模型驗證方法能夠使有限元模型獲得較好的生物逼真度。
小腿;中國人體;優化;有限元模型;驗證
引言
交通安全問題是一個世界性難題,全球每年超過117萬人在交通事故中喪生,受傷者更是達到1 000萬人[1]。下肢是交通事故中最易受到損傷的部位之一[2],包括膝關節損傷、長骨骨折等[3]。下肢損傷不僅給受害者造成巨大傷痛,也會給社會和家庭帶來沉重負擔。為更好地了解下肢損傷的機理,許多研究者采用尸體實驗來研究下肢損傷,但由于實驗成本高、樣本難以獲得且重復性差等原因,人體有限元模型獲得了廣泛應用。
在國外,下肢有限元模型發展較早。1993年,Bermond等就開發了包括股骨、脛骨和主要韌帶的行人下肢模型,但幾何外形不準確[4]。1998年,Wykowski等開發了乘員下肢有限元模型,只有骨骼并且將骨骼定義為剛體[5]。2005年,Untaroiu等基于LS-DYNA求解器,開發了行人下肢有限元模型,定義了肌腱、肌肉和皮膚,并進行了較詳細的驗證[6]。2013年,Untaroiu等基于先前的模型,更詳細地提取骨骼幾何外形,建立了乘員下肢有限元模型[7]。在國內,下肢有限元模型研究起步比較晚,2000年后一些學者根據國外模型進行了材料改進和驗證[8-11],并沒有根據中國人體的幾何外形建立中國人體下肢有限元模型。目前的下肢有限元模型大多都是根據歐美人體建立的,而中國人體在尺寸上與歐美人體存在較大差異,其生物力學響應與中國人體存在多大差異目前并不明確。
不同組織層次的全面驗證是保證人體有限元模型生物逼真度的有效手段。但由于試驗樣本在幾何尺寸、組織材料等方面的差異,造成不同樣本的生物力學響應存在較大差異,這給模型驗證帶來了較大的挑戰,尤其是要同時滿足不同組織層次、不同載荷工況的多目標模型驗證。
因此,為建立具有較高生物逼真度且良好適用性的中國50th人體有限元模型,本研究利用醫學影像數據建立了中國50th人體小腿有限元模型,基于優化方法構建了模型驗證方法,對不同組織層次、不同加載方向、不同加載位置等多種工況下的小腿模型進行了驗證,使一個模型同時與多種試驗數據吻合。
1 小腿有限元模型建立
1.1 幾何模型
精確的幾何模型是獲得高質量有限元模型的基礎。利用CT和MRI醫學影像分別構建小腿長骨(脛骨和腓骨)和肉體幾何,如圖1所示。醫學影像數據來源于一位骨骼正常的接近中國50th的男性血管疾病患者(身高173.1 cm,體重69.7 kg)。
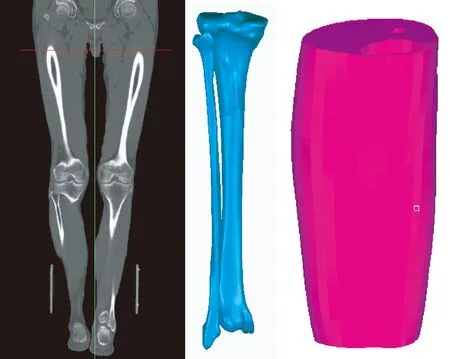
圖1 小腿醫學影像與脛骨、腓骨和肌肉的幾何模型Fig.1 The medical imaging and geometry of the shank
1.2 有限元模型
綜合使用ANSYSY ICEM CFD和Hypermesh對小腿模型進行網格劃分。脛骨體皮質骨采用4層六面體網格模擬;脛骨兩端皮質骨較薄,用殼單元模擬,松質骨采用體單元模擬。脛骨體與脛骨兩端皮質骨過渡區域選用階梯形狀逐漸過渡,以減小應力集中,如圖2所示。腓骨骨干皮質骨采用2層六面體單元模擬,兩端皮質骨采用厚度為1.5 mm的殼單元模擬,骨干皮質骨與兩端皮質骨的過渡同樣采用階梯形狀。小腿的肉體采用實體單元模擬,用CONTACT_TIED_NODES_TO_ SURFACE將肌肉與脛骨、腓骨連接。皮膚采用殼單元模擬,使用共節點方式與肌肉連接。
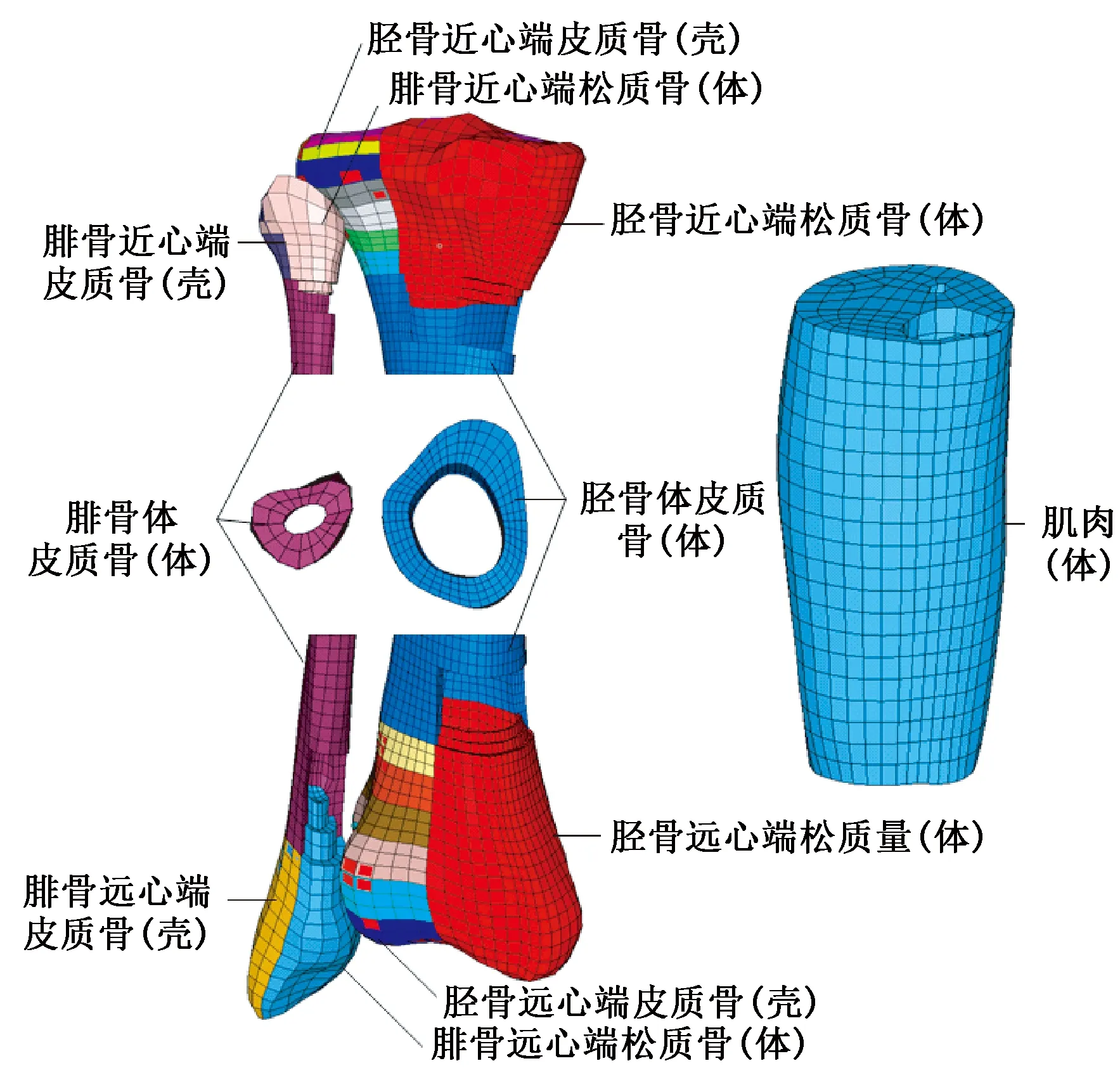
圖2 小腿網格的劃分Fig.2 The mesh division of legs
脛骨、腓骨模型雅克比小于0.60的單元比例不超過1%,最小值為0.42;翹曲度大于20°的單元比例不超過2%,最大值為120°;長寬比大于3.5的單元比例小于5%,最大值為5.2;最小單元尺寸4.69 mm,最大單元尺寸6.42 mm。
1.3 有限元模型尺寸縮放
由于本模型的人體尺寸(身高173.1 cm,體重69.7 kg)大于中國50百分位人體尺寸[12](身高 170.8 cm,體重65 kg),需要將小腿模型縮放到中國50百分位人體小腿尺寸。在碰撞過程中,脛骨是決定小腿生物力學響應的主要部分,因此本研究依據脛骨尺寸對小腿模型進行縮放。
軸向縮放系數主要依據中國50百分位人體與本樣本脛骨長的比例,橫向縮放系數主要依據中國50百分位人體與本樣本股骨上內關節面矢徑和上外關節面矢徑比例的平均值,縱向縮放系數主要依據中國50百分位人體與本樣本的上段寬和下段寬比例的平均值[12]。最終確定脛骨的軸向縮放系數為0.965,橫向縮放系數為0.969,縱向縮放系數為0.964,如表1所示。將脛骨模型按照3個方向縮放系數平均值縮放至中國50百分位男性脛骨的尺寸,并依據此比例對小腿腓骨、肉體和皮膚模型進行縮放,最終獲得中國50百分位男性小腿有限元模型。
1.4 小腿材料模型
脛骨、腓骨的皮質骨采用可分別定義拉、壓應力-應變曲線的彈塑性材料,應力-應變曲線初始值如圖3所示[13]。采用黏彈塑性材料模擬松質骨。皮膚采用彈性材料模擬,密度為1 000 kg/m3,彈性模量為1 MPa,泊松比為0.3,厚度為1 mm[14-15]。肉體使用黏彈性材料模擬,密度為1 000 kg/m3,體積模量為20 MPa,超彈性系數C1為1.2×10-4MPa,超彈性系數C2為2.5×10-4MPa,普羅尼算法系數S1為1.162,普羅尼算法系數S2為0.808,普羅尼算法系數T1為10.43 ms,普羅尼算法系數T2為84.1 ms[16]。采用失效應變作為失效準則來模擬損傷,在材料達到設定的失效應變后自動刪除失效單元。根據相關文獻設定模型優化前各參數取值,如表2所示[14, 17-24]。

表2 小腿模型材料參數設置Tab.2 Material parameters of leg model
2 小腿有限元模型的優化驗證
充分全面的驗證是保證有限元模型適應性和逼真度的基礎,本研究進行的模型驗證包括準靜態驗證和動態驗證,如表3所示。傳統的驗證方式采用試錯法手動調節材料參數對模型進行驗證,效率低且準確度有限。本研究采用優化方法自動獲得最佳材料參數值,能同時保證模型的生物力學響應與多個試驗結果吻合。

圖4 小腿模型驗證流程Fig.4 Flow chart of the shank model validation
先對脛骨近心端、中部、遠心端3個加載位置的動態仿真進行脛骨體皮質骨的彈性模量和拉、壓應力-應變曲線優化(此時未定義失效應變),將得到的最佳材料參數更新到脛骨模型,然后對脛骨近心端、中部、遠心端3個加載位置的動態仿真進行脛骨失效應變優化。同樣,對腓骨進行類似的優化驗證。接著將得到的最佳材料參數更新到小腿模型,對小腿近心端、中部、遠心端3個加載位置的動態仿真進行肉體材料的體積模量優化。最終獲取一組最佳材料參數,再對脛骨和腓骨的準靜態試驗進行校核。優化流程如圖4所示,設計變量的取值范圍如表4所示[7, 14, 19, 30-32]。

表3 小腿有限元模型驗證Tab.3 Finite element model validation of the shank
注:A-P為載荷由前向后方向,L-M為載荷由外側向內側。
Note:A-P: loading direction from anterior to posterior;L-M: loading direction from lateral to medial.
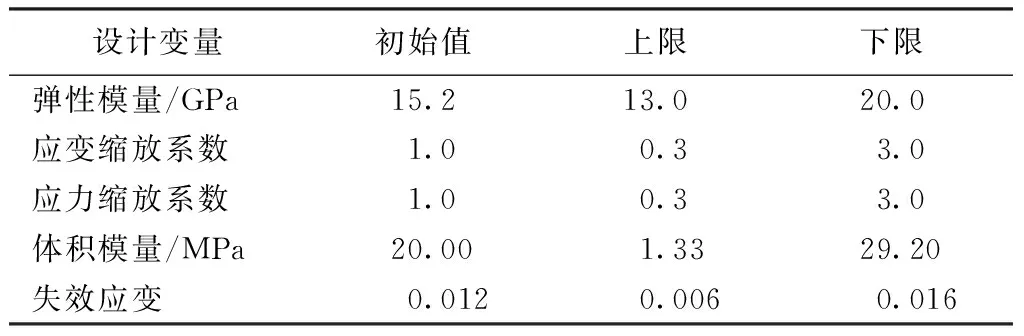
表4 設計變量的取值范圍Tab.4 The range of design variables
在脛骨和腓骨體皮質骨的彈性模量和拉、壓應力-應變曲線優化中,設計變量分別彈性模量和拉、壓應力-應變曲線橫(應變)、縱(應力)坐標的縮放系數。在肌肉材料參數優化中,設計變量為體積模量。目標函數為仿真與實驗的力-位移曲線的均方差f(X)的最小值[33],即
(1)
式中:X為設計變量,k=1,2, …,K,K為實驗曲線的條數;m=1,2, …,Pk,Pk為第k條曲線中計算點的個數;Wm為權重系數,本研究中各工況權重為1;fm(X)為響應面近似模型的計算值;Gm為實驗測試點的值。
在脛骨和腓骨體皮質骨的失效應變優化中,設計變量為失效應變。目標函數為各工況仿真與實驗的力-位移曲線的力極大值點對應的位移之差絕對值f(X)的最小值,即
(2)
式中:n=1,2,…,N,N為工況的個數;Xn為第n個工況中實驗的力-位移曲線的位移最大值;Xsn為第n個工況中仿真的力-位移曲線的力極大值對應的位移。
在優化中,如果某個工況下的目標實驗曲線有多個,則采用這些實驗曲線的平均曲線作為該工況優化的目標曲線。平均曲線的計算方法參照Lessley等的計算(2004)[34]。
2.1 生物力學實驗數據縮放
脛骨和腓骨動態仿真采用Takahashi等實驗(2003)中脛骨長度為467 mm的數據[35],小腿動態仿真采用Kerrigan(2008)縮放至美國50百分位人體的數據[36]。為了準確驗證中國50百分位人體的有限元模型,還需將實驗數據縮放到與中國50百分位人體幾何相對應的數值,以消除尺寸差異對生物力學響應的影響。
Kerrigan(2008)為準確獲得美國50百分位人體小腿的損傷耐受限度和彎曲響應,采用脛骨長度縮放系數λL計算位移縮放系數λD和力縮放系數λF,然后對實驗數據進行縮放[2],具體計算如下:
式中,L50th為美國50百分位人體的脛骨長度,L樣本為試驗樣本的脛骨長度。
實驗曲線中的位移、力、彎矩乘以相應的縮放系數,即可得到與美國50百分位相對應的曲線。按照上述實驗數據縮放方法,只需將美國50百分位人體的脛骨長度縮放至中國50百分位人體的脛骨長度。
由于脛骨準靜態試驗所用脛骨長度尺寸不能確定,本研究只對脛骨、腓骨和小腿動態仿真的實驗數據進行縮放。文獻中脛骨、腓骨和小腿動態實驗數據已經過縮放,所以本研究在脛骨、腓骨樣本的近心端1/3處、中間、遠心端1/3處的縮放系數相同,小腿樣本的近心端1/3處、中間、遠心端1/3處的縮放系數相同,如表5所示。實驗樣本的位移、力乘以相應縮放系數即可得到與中國50百分位人體尺寸相對應的縮放實驗曲線。
表5 實驗樣本的縮放系數和脛骨長度
Tab.5 The scaling coefficients of the experimental samples and the length of the tibia

縮放參數脛骨L樣本小腿L樣本Prox.Mid.Dist.Prox.Mid.Dist.中國50thL50th脛骨長/mm391.00391.00391.00378.70378.70378.70354.02λL0.9050.9050.9050.9350.9350.935—λD0.9050.9050.9050.9350.9350.935—λF0.8190.8190.8190.8740.8740.874—
2.2 脛骨、腓骨和小腿模型動態模型
鑒于人體側面遭受撞擊的幾率遠大于其他方向[36],本研究僅進行L-M方向的動態仿真。Kerrigan等(2003)和Kerrigan(2008)對脛骨、腓骨和小腿的近心端1/3處、中部、遠心端1/3處進行了三點彎曲實驗[28, 36]。在脛骨和腓骨的實驗中,沖擊塊被一層厚25 mm的ConforTM 泡沫包裹,沖擊速度為1.45 m/s,在小腿實驗中,加載速度為1.5 m/s。Untaroiu等(2005)[2]和Takahashi等(2003)[16]使用其數據開展了模型驗證。本研究參照上述實驗和仿真建立脛骨、腓骨和小腿的動態三點彎曲驗證模型,分別如圖5~7所示。金屬方盒、弧形板、支撐平板和沖擊塊均定義為剛體,泡沫定義為柔性體(Material #57)。長骨與金屬盒的連接定義為剛性連接(*CONSTRAINED_EXTRA_NODES _SET)[2,16]。

圖5 脛骨動態三點彎曲仿真模型Fig.5 Simulation of tibia dynamic 3-point bending test

圖7 小腿動態三點彎曲仿真模型Fig.7 Simulation of shank dynamic 3-point bending test

圖6 腓骨動態三點彎曲仿真模型
Fig.6 Simulation of fibula dynamic 3-point bending test
2.3 脛骨和腓骨模型準靜態仿真模型
依據Yamada、Asang、Ehler相關文獻[25-27]建立仿真模型。用直徑為25 mm的剛性圓筒沖擊器,以0.01 m/s的速度對長骨中部進行加載。根據載荷加載方向的不同,脛骨和腓骨準靜態三點彎曲仿真分為A-P和L-M兩個方向的驗證。仿真設置如圖8、9所示。

圖8 脛骨準靜態三點彎曲仿真模型。(a) A-P;(b) L-MFig.8 Quasi-static 3-point bending simulation of tibia. (a) A-P; (b) L-M

圖9 脛骨準靜態三點彎曲仿真模型。(a) A-P;(b) L-MFig.9 Quasi-static 3-point bending simulation of fibula. (a) A-P; (b) L-M
3 模型仿真結果
3.1 優化結果
圖10列出了典型的設計變量在優化過程中的收斂歷程。隨著迭代次數的增加,各設計變量興趣域空間逐漸縮小,各參數取值逐漸穩定。最終脛骨體皮質骨彈性模量為18.43 GPa,拉、壓應力-應變曲線橫、縱坐標的縮放系數分別為2.560和0.684,失效應變為1.2%;腓骨體皮質骨彈性模量為18.23 GPa,拉、壓應力-應變曲線橫、縱坐標的縮放系數分別為2.888和0.725,失效應變為0.8%;小腿肉體積模量為11.33 MPa。

圖10 材料參數收斂過程。(a)脛骨彈性模量;(b) 脛骨應力-應變曲線橫坐標(應變)縮放系數;(c) 脛骨應力-應變曲線縱坐標(應力)縮放系數;(d) 小腿體積模量Fig.10 Convergence process of material parameters. (a) Elastic modulus of the tibia; (b) Abscissa scaling factor of the tibial stress-strain curve; (c) Ordinate scaling factor of the tibial stress strain curve; (d) Bulk modulus of the shank
3.2 動態仿真優化結果
脛骨、腓骨和小腿材料參數優化后,仿真結果與縮放后試驗曲線的對比分別如圖11~13所示。

圖11 脛骨動態三點彎曲優化驗證結果。(a)近心端1/3處;(b)中部;(c)遠心端1/3處Fig.11 Dynamic 3-point bending validation results for tibia against test results with optimization method. (a) Proximal 1/3; (b) Middle-shaft; (c) Distal 1/3

圖12 腓骨動態三點彎曲優化驗證結果。(a)近心端1/3處;(b)中部;(c)遠心端1/3處Fig.12 Dynamic 3-point bending validation results for fibula against test results with optimization method. (a) Proximal 1/3; (b) Middle-shaft; (c) Distal 1/3

圖13 小腿動態優化驗證與縮放后的試驗曲線。(a)近心端1/3處;(b)中部;(c)遠心端1/3處Fig.13 Dynamic 3-point bending validation results for shank against test results with optimization method. (a) Proximal 1/3; (b) Middle-shaft; (c) Distal 1/3
由圖11~圖13可知,脛骨動態三點彎曲仿真的近心端1/3處和遠心端1/3處力-位移曲線與目標曲線吻合程度較好;脛骨中部三點彎曲仿真的力-位移曲線在上半段與目標曲線擬合較好,雖然在下半段存在一些偏差,但曲線的走勢基本一致。腓骨近心端、中部、遠心端3處加載位置的動態仿真都與目標曲線吻合良好。小腿近心端和中部加載位置的動態仿真與目標曲線吻合較好,但在遠心端1/3加載位置的仿真結果不夠理想。
3.3 準靜態仿真結果
使用優化后的材料參數進行脛骨和腓骨A-P、L-M兩個加載方向的準靜態三點彎曲仿真。由于實驗涉及的脛骨長度無法確定,在準靜態仿真時未對實驗曲線進行縮放。脛骨和腓骨的驗證結果分別如圖14、15所示。仿真結果在實驗曲線范圍內,并與實驗曲線保持了較好的一致性。模型發生損傷時的變形量和碰撞力也與實驗曲線吻合較好。
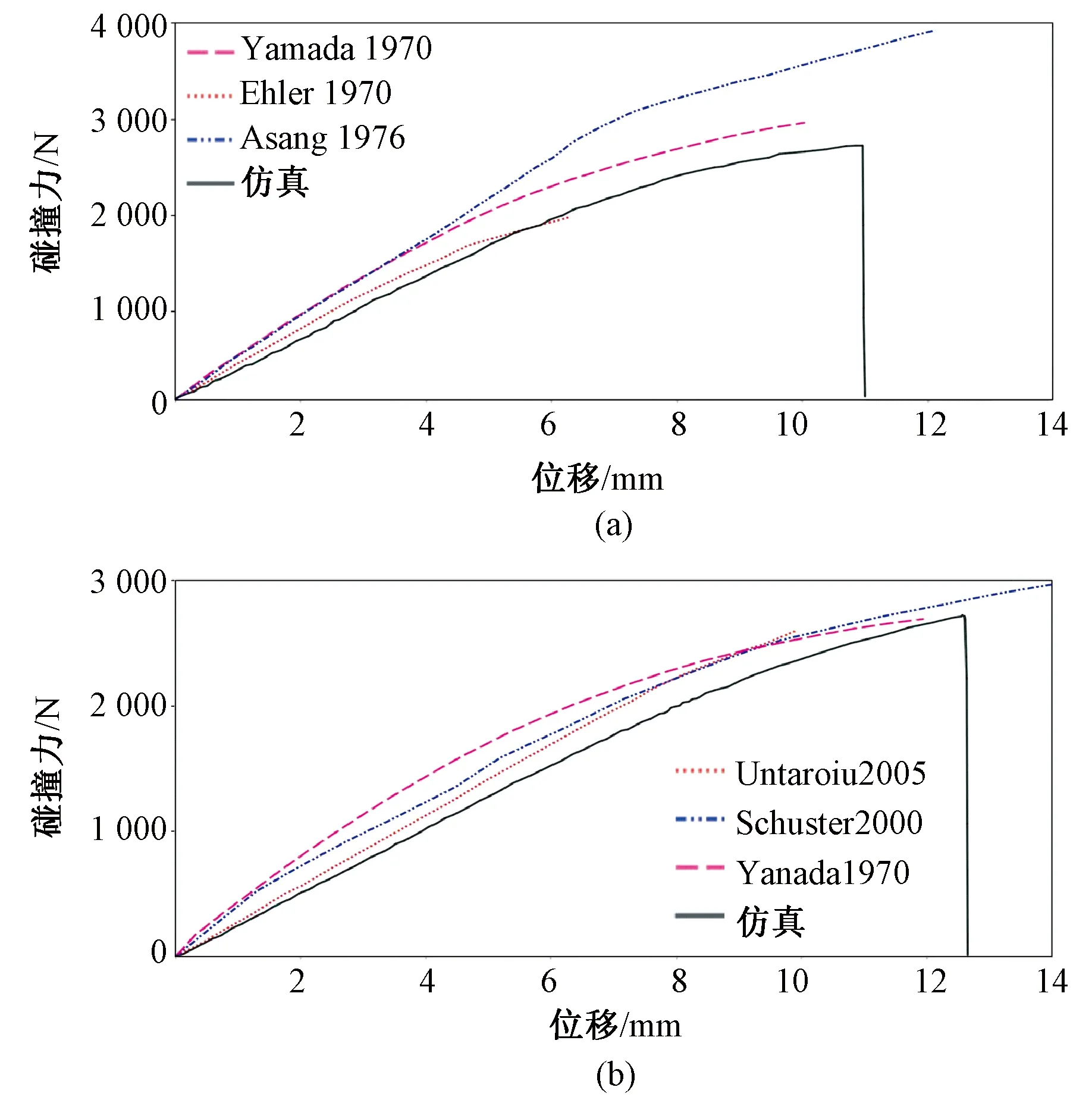
圖14 脛骨準靜態三點彎曲驗證結果。(a) A-P;(b) L-MFig.14 Quasi-static 3-point bending validation results for tibia against test results with optimization method
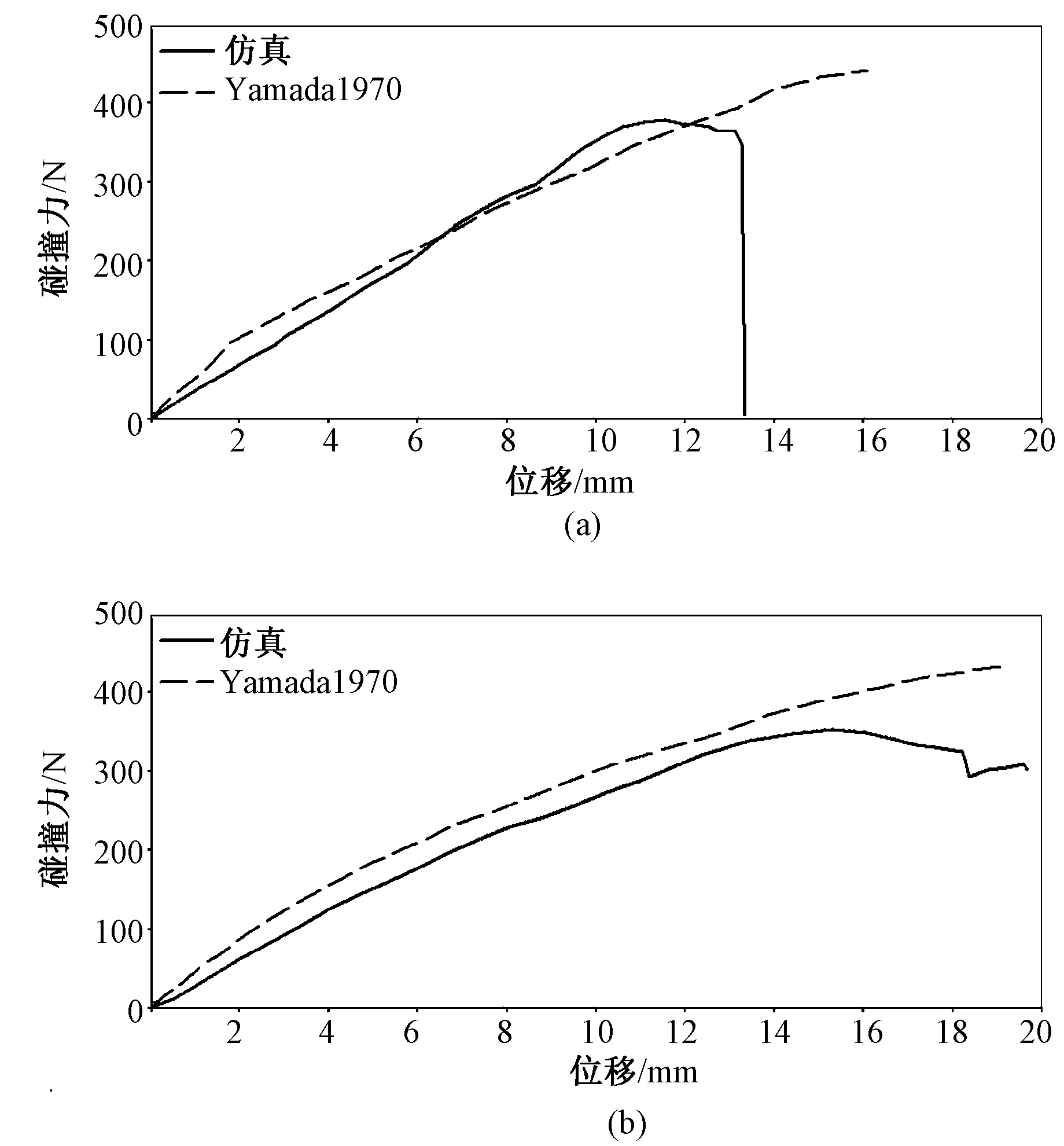
圖15 腓骨準靜態三點彎曲驗證結果。(a) A-P;(b) L-MFig.15 Quasi-static 3-point bending validation results for fibula against test results with optimization method. (a) A-P; (b) L-M
4 討論
本研究采用優化方法對所建立的中國50th男性人體小腿有限元模型進行了全面的驗證,股骨和脛骨的彈性模量、應力-應變曲線縮放系數、失效應變和小腿肉的體積模量等設計變量均能夠有效收斂于最優值。脛骨和腓骨皮質骨的彈性模量分別為18.43和18.23 GPa,這與多個文獻給出的14.3~21.1GPa[19, 37-38]的范圍一致。脛骨和腓骨皮質骨的失效應變分別為1.2%和0.8%,這與文獻[19]基本一致。小腿肉的體積模量為11.33 MPa,也在文獻給出的1.33~29.2 MPa[16,39]的范圍內。
腓骨近心端、中部和遠心端3處不同加載位置的動態仿真都與試驗曲線吻合良好,A-P、L-M兩個加載方向的準靜態仿真也與試驗曲線吻合較好。脛骨近心端和遠心端加載位置的動態仿真以及A-P、L-M兩個加載方向的準靜態仿真均與試驗結果吻合良好,但中部加載位置的動態仿真與試驗結果有一定差異。小腿中部加載的動態仿真與試驗結果吻合較好,但近心端和遠心端加載位置的動態仿真與試驗結果有一定差異。上述驗證所涉及的生物力學試驗對應的試樣樣本較多,樣本年齡分布較廣,個體差異帶來較大的生物力學響應的差異。因此,用一套材料參數同時滿足基于不同樣本的多組試驗曲線存在較大的現實難度。通過多工況同時優化并設置相同的權重,能夠最大限度地保證仿真結果的總體擬合效果。
由于缺少中國人體的生物力學試驗數據,本研究開展驗證所用的試驗數據均來源于歐美人體。但中國人體與歐美人體在解剖學結構方面存在一定的差異,而基于縮放方法的試驗數據縮放,能夠在一定程度上減小解剖學結構差異對模型驗證的影響。不管中國人體還是歐美人體均屬人類,兩者在力學特性及材料參數方面雖存在差異,但可能并不大。但是,將來仍需要針對中國人體開展相應的生物力學試驗,以揭示與歐美人體在力學特性方面的差異,并為中國人體數學模型的研究提供基礎性數據支持。
5 結論
本研究通過CT和MRI醫學影像數據建立了小腿骨骼和肉體幾何模型,并根據人體統計學數據將小腿模型縮放到中國50百分位人體尺寸。使用優化方法,對脛骨、腓骨和小腿不同加載位置的仿真進行優化,獲得了理想的材料參數,并能夠滿足準靜態下脛骨和腓骨不同加載方向的生物力學逼真度。結果表明,所建立的中國人體50百分位小腿模型具有較高的生物逼真度,基于優化和縮放方法的人體有限元模型驗證方法能夠有效解決試驗樣本幾何、材料多樣性帶來的多工況試驗數據擬合問題,保證模型具有較好的生物逼真度和較廣泛的適用性。
[1] Zhang Guanjun, Cao Libo, Hu Jingwen, et al. A field data analysis of risk factors affecting the injury risks in vehicle-to-pedestrian crashes [J]. Ann Adv Automot Med, 2008, 52: 199-214.
[2] Kim YS, Choi HH, Cho YN, et al. Numerical investigations of interactions between the knee-thigh-hip complex with vehicle interior structures [J]. Stapp Car Crash J, 2005, 49: 85-115.
[3] Yang Jikuang. Injury biomechanics in car-pedestrian collisions: development, validation and application of human-body mathematical models [D]. Gothenburg: Chalmers University of Technology, 1997.
[4] Bermond F, Ramet M, Bouquet R, et al. A finite element model of the pedestrian knee joint in lateral impact [C] // Proceedings of the International Research Council on the Biomechanics of Injury Conference. Eindhoven: INRETS-Bron, 1993: 117-129.
[5] Wykowski E, Sinnhuber R, Appel H. Finite element model of human lower extremities in a frontal impact [C]//Proceedings of the International Research Council on the Biomechanics of Injury Conference. Goteborg: IRCOBI Secretariat, 1998: 101-116.
[6] Untaroiu CD. Development and validation of a finite element model of human lower limb: including detailed geometry, physical material properties, and component validations for pedestrian injuries [D]. Charlottesville: University of Virginia, 2005.
[7] Untaroiu CD, Yue N, Shin J. A finite element model of the lower limb for simulating automotive impacts [J]. Annals of Biomedical Engineering, 2013, 41(3): 513-526.
[8] 楊濟匡, 方海峰. 人體下肢有限元動力學分析模型的建立和驗證 [J]. 湖南大學學報(自然科學版), 2005, 32(5): 31-36.
[9] 張冠軍. 行人下肢的碰撞損傷特性及相關參數研究 [D].長沙: 湖南大學, 2009.
[10] 李正東, 劉寧國, 黃平, 等. 下肢有限元模型的建立及損傷機制重建 [J]. 中國司法鑒定, 2012(6): 37-42.
[11] 蔣小晴, 楊濟匡, 王丙雨, 等. 乘員股骨在軸向壓力-彎矩下的損傷生物力學機理研究 [J]. 力學學報, 2013, 46(3): 465-474.
[12] 劉俊先, 張興和. 中國正常人體測量值 [M]. 北京: 中國醫藥科技出版社, 1994: 62-63.
[13] Novitskaya E, Chen PY, Hamed E, et al. Recent advances on the measurement and calculation of the elastic moduli of cortical and trabecular bone: a review [J]. Theoretical and Applied Mechanics, 2011, 38(3): 209-297.
[14] Beillas P, Begeman PC, Yang KH, et al. Lower limb: advanced FE model and new experimental data [J]. Stapp Car Crash J, 2001, 45: 469-494.
[15] Karimi A, Navidbakhsh M. Material properties in unconfined compression of gelatin hydrogel for skin tissue engineering applications [J]. Biomedical Engineering/ Biomedizinische Technik, 2014, 59(6): 479-486.
[16] Snedeker JG, Muser MH, Walz FH. Assessment of pelvis and upper leg injury risk in car-pedestrian collisions: comparison of accident statistics, impactor tests and a human body finite element model [J]. Stapp Car Crash J, 2003, 47: 437-458.
[17] Iwamoto M, Tamura A, Furusu K, et al. Development of a finite element model of the human lower extremity for analyses of automotive crash injuries [C] //SAE 2000 World Congress. Detroit: SAE International, 2000: 2000-01-0621.
[18] Schuster PJ, Chou CC, Prasad P, et al. Development and validation of a pedestrian lower limb non-linear 3-d finite element model [J]. Stapp Car Crash J, 2000, 44: 315-334.
[19] Takahashi Y, Kikuchi Y, Konosu A, et al. Development and validation of the finite element model for the human lower limb of pedestrians [J]. Stapp Car Crash J, 2000, 44: 335-355.
[20] Chawls A, Mukherjee S, Mohan D, et al. Validation of lower extremity model in THUMS [C] //Proceedings of the International Research Council on the Biomechanics of Injury conference. Graz: IRCOBI Secretariat, 2004: 155-166.
[21] Arnoux PJ, Cesari D, Behr M, et al. Pedestrian lower limb injury criteria evaluation: a finite element approach [J]. Traffic Injury Prevention, 2005, 6(3): 288-297.
[22] Untaroiu C, Darvish K, Crandall J, et al. A finite element model of the lower limb for simulating pedestrian impacts [J]. Stapp Car Crash J, 2005, 49: 157-181.
[23] Silvestri C, Ray M. Development of a finite element model of the knee-thigh-hip of a 50th percentile male including ligaments and muscles [J]. International Journal of Crashworthiness, 2009, 14(2): 215-229.
[24] Neale M, Thomas R, Bateman H, et al. A finite element modelling investigation of lower leg injuries [C] //Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV). Lyon: NHTSA, 2007: 07-0077.
[25] Yamada H. Strength of biological materials [M]. Baltimore: The Williams & Wilkins Company, 1970: 49-73.
[26] Ehler E, L?sche H. Die menschliche tibia unter biegebelastung [J]. Beitr. Orthop, 1970, 17(5): 291-304.
[27] Asang E. Experimental biomechanics of the human leg: a basis for interpreting typical skiing injury mechanisms [J]. The Orthopedic Clinics of North America, 1976, 7(1): 63-73.
[28] Kerrigan J, Ivansson B, Bose D, et al. Rate-sensitive constitutive and failure properties of human collateral knee ligaments [C]//Proceedings of the International Research Council on the Biomechanics of Injury conference. Lisbon: IRCOBI Secretariat, 2003: 177-190.
[29] Begeman P, Paravasthu N. Static and dynamic compression loading of the lower leg [C]//Proceedings of the Seventh Injury Prevention Through Biomechanics Symposium. Detroit: Wayne State University, 1997.
[30] Burstein AH, Reilly DT, Martens M. Aging of bone tissue: mechanical properties [J]. J Bone Joint Surg Am, 1976, 58(1): 82-86.
[31] Martens M, van Audekercke R, Delport P, et al. The mechanical characteristics of cancellous bone at the upper femoral region [J]. Journal of Biomechanics, 1983, 16(12): 971-983.
[32] Galbusera F, Freutel M, Dürselen L, et al. Material models and properties in the finite element analysis of knee ligaments: a literature review[J]. Frontiers in Bioengineering and Biotechnology, 2014, 2: 1-11.
[33] 官鳳嬌. 沖擊載荷下的生物組織材料參數反求及損傷研究 [D]. 長沙: 湖南大學, 2011.
[34] Lessley D, Crandall J, Shaw G, et al. A normalization technique for developing corridors from individual subject responses [C] //SAE 2000 World Congress. Detroit: SAE International, 2004: 2004-01-0288.
[35] Takahashi Y, Kikuchi Y, Mori F, et al. Advanced finite element lower limb model for pedestrians [C] //Proceedings of the 18th International Technical Conference on the Enhanced Safety of Vehicles (ESV). Lyon: NHTSA, 2003: No 218.
[36] Kerrigan JR. A computationally efficient mathematical model of the pedestrian lower extremity [D]. Charlottesville: University of Virginia, 2008.
[37] Rho JY, Ashman RB, Turner CH. Young's modulus of trabecular and cortical bone material: ultrasonic and microtensile measurements [J]. J Biomech, 1993, 26(2): 111-119.
[38] Snyder SM, Schneider E. Estimation of mechanical properties of cortical bone by computed tomography [J]. J Orthop Res, 1991, 9(3): 422-431.
[39] Ruan J, El-Jawahri R, Chai L, et al. Prediction and analysis of human thoracic impact response and injuries in cadaver impacts using a full human body finite element model [J]. Stapp Car Crash J, 2003, 47: 299-321.
Study on FE Modeling Method of the 50th Percentile Chinese Shank with Optimization Methods under Multi-Loading Condition
Zhang Guanjun1Wang Longliang1Deng Xiaopeng1Du Xianping1Guan Fengjiao2*
1(StateKeyLaboratoryofAdvancedDesignandManufacturingforVehicleBody,HunanUniversity,Changsha410082,China)2(CollegeofMechatronicEngineeringandAutomation,NationalUniversityofDefenseTechnology,Changsha410073,China)
The lower extremity of the human body is one of the most vulnerable parts in traffic accidents, and the finite element (FE) model of the lower limb has become an important tool to study mechanisms and protective methods of lower limb injuries. In order to ensure the fidelity of the model, it is necessary to carry out a comprehensive validation under multi-loading conditions. The biomechanical test data are different in the mechanical response due to the sample size and material diversity, so it is difficult to use one model to meet the multiple test data. The differences in geometric dimensions between Chinese and occidental human body would result in differences of biomechanical response, so it is necessary to develop the FE model of Chinese human body. In this paper, Geometry model based on the CT and MRI data was scaled to the 50 percentile male according to scaling factor derived from key dimensions of the tibia. The scaling method was also used to scale biomechanical test data to the biomechanical response data corresponding to the size of the leg. The elastic modulus, stress-strain curve, failure strain of the tibia and fibula and physical bulk modulus of the muscle were selected as design variables, the optimization method was used to fit tibia, fibula and calf biomechanical responses under different load positions in the quasi-static and dynamic loading conditions, which solved the problem with diversity caused by the test sample. When the elastic modulus of tibia and fibula were 18.43 and 18.23GPa, respectively, the failure strains were 1.156% and 0.8%, respectively, and physical bulk modulus of the calf was 11.33MPa, the calf model could fit the biomechanical responses well in many groups of tests. The FE model verification methods based on the optimization of multi-loading conditionsmade the FE model acquire better biofidelity effectively.
shank; Chinese human body; optimization; finite element model; validation
10.3969/j.issn.0258-8021. 2017. 02.010
2016-06-29, 錄用日期:2016-09-07
國家自然科學基金(11402296);中央高校基本科研業務費(531107040162);湖南大學汽車車身先進設計制造國家重點實驗室自主研究課題(51475002)
R318
A
0258-8021(2017) 02-0195-010
*通信作者(Corresponding author),E-mail: gfj0921@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24