基于CCD的透鏡焦距測量實驗系統的設計
2017-06-05 14:15:40郭振宇何鵬舉王西玲徐榮青
計算機技術與發展 2017年5期
郭振宇,謝 娜,何鵬舉,王西玲,諶 靜,徐榮青
(南京郵電大學 電子科學與工程學院,江蘇 南京 210003)
基于CCD的透鏡焦距測量實驗系統的設計
郭振宇,謝 娜,何鵬舉,王西玲,諶 靜,徐榮青
(南京郵電大學 電子科學與工程學院,江蘇 南京 210003)
針對傳統測量焦距讀數所引起誤差較大的問題,實驗系統在傳統放大率法測焦距的基礎上用CCD代替人眼實現數字化測量,并用電控平移臺控制步進精度,顯著提高了其測量精度和自動化程度。圖像清晰度評價是焦距測量的一個關鍵步驟,在對CCD工業相機獲取的圖片的清晰度評價中,提出了一種改進的灰度差分評價函數,提高了圖片清晰度評價精度和速度,從而提高了系統的測量速度。實驗進行了光學成像系統的搭建,以Matlab為開發平臺進行軟件開發,實驗系統搭建方便,操作簡單,測量精度和自動化程度高。實驗結果表明,該系統能夠對透鏡焦距(以正透鏡為例)進行準確測量,改進的清晰度評價函數聚焦速度比傳統的清晰度評價函數快3倍,測量焦距重復精度高于1%。
CCD;清晰度評價;焦距;實驗系統
0 引 言
機器視覺作為人工智能發展的一個分支,應用廣泛,用機器代替人眼來做測量無疑是一項提高精度的好方法。機器視覺系統是通過圖像攝取裝置(CMOS和CCD)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統以獲得需要的結果。該技術擴大了光學測量的范圍,提高了測量精度,大大增強了光學測量的手段。CCD(Charge Couple Devices)能夠把光信號轉換成電荷信號,經外部采樣放大及模數轉換電路轉換成數字圖像信號。其具有高解析度、低雜訊、動態范圍廣、良好的線性特性曲線、大面積感光、低影像失真等特點。
CCD作為一種提高精度的測量技術正被廣泛地應用在光學測量中[1-6]。文獻[1]中傳統的測量透鏡焦距的方法是用像屏獲取圖像,再對圖像進行人工處理。這種做法不僅測量的精度不高,而且操作難度大。文獻[7]中采用了VC++編寫程序來完成對圖像的處理,不僅開發效率低,而且還要求編程人員具有較高的代碼水平。為了能獲得較高精度的焦距測量值,采用CCD工業相機作為圖像獲取的工具;同時又為了能對圖像進行高效處理,采用了Matlab進行圖像的處理和分析,提高了開發效率。設計的光學系統具有搭建方便,結構簡單,以及測量精度高等優點。
根據最常用的放大率測焦距法的原理設計了切實可行的光學系統。在算法設計中,針對傳統的灰度差分算法聚焦精度低、運算速度慢的缺點,提出了一種改進的灰度差分算法,提高了聚焦速度,判別清晰度只需400 ms,比傳統的清晰度判別方法快了3倍;在圖像提取和測量中,采用Canny算法對圖像進行邊緣檢測,對圖像采集的多條光條相鄰兩條的間隔取平均求得相鄰光條像素間隔,同時進行多次像素間隔測量,用多次測量的結果進行像素標定,再進行焦距測量,提高了透鏡焦距的測量精度,測量重復精度高于1%。
1 光學系統的設計
1.1 實驗系統原理
放大率法是測量焦距最基本和最常用的方式,圖1為放大率法測焦距的原理圖。
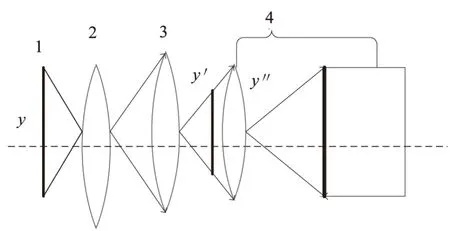
1.分劃板;2.平行光管;3.待測透鏡;4.測量系統CCD相機
平行光管物鏡焦平面上的分劃板經過待測透鏡后成像在待測透鏡的焦平面上,測量系統獲取待測透鏡焦平面的像進行處理。設平行光管的焦距為f,待測透鏡的焦距為f',分劃板一對刻線的原像為y,經過待測透鏡后變成y',則待測透鏡焦距與平行光管焦距以及刻線原像和經過透鏡成像的關系如式(1):

(1)
當在測量系統前加一個放大K倍的鏡頭時,得到y''。則可以得到:
y''=Ky'
(2)
由式(1)、(2)可得:

(3)
1.2 實驗系統搭建
文獻[1]中采用像屏來獲取圖像,該方案是比較傳統的實驗系統,讀數誤差會較大。系統采用CCD,有效降低了讀數誤差。
系統的搭建方案如圖2所示,主要由平行光管、固定裝置(用來固定平行光管和透鏡)、CCD工業相機和電控平移臺組成。
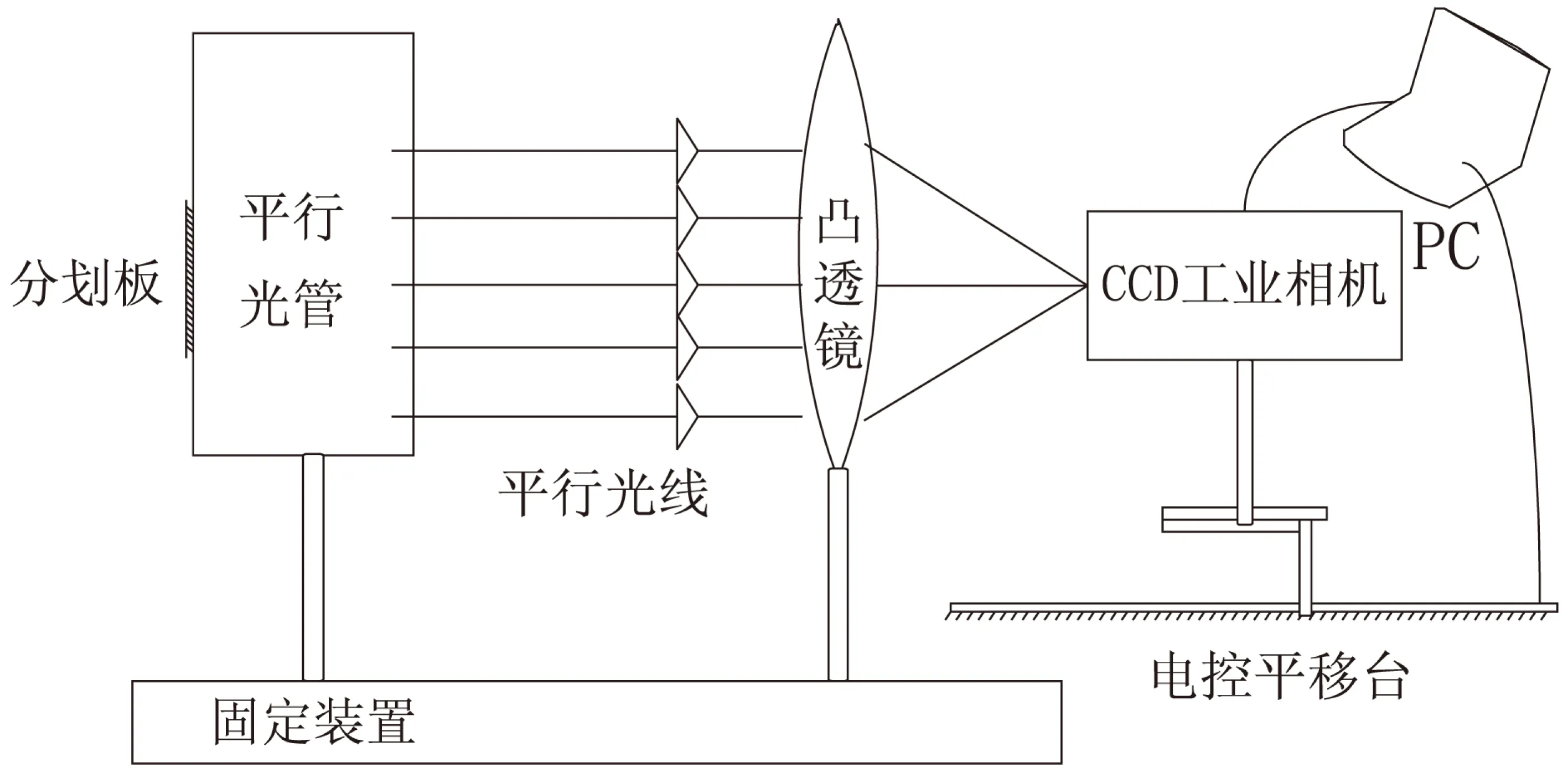
圖2 光學系統搭建方案
平行光管型號采用F550,焦距550 mm,口徑55 mm,相對孔徑1∶10。電控平移臺臺面尺寸150×150,行程1 000 mm,單脈沖行程0.001 25,最大速度10 mm/s,步進電機1.8°。CCD工業相機采用2.0接口數字攝像機,1/3 Sony ICX445 CCD傳感器芯片,體積為29 mm×29 mm×29 mm,單個像素尺寸為3.75 μm×3.75 μm,分辨率為1 292×964。
所有的器材按圖2所示搭建,搭建完畢后要先進行平行光管的校調,采用自準直法[8]。平行光管校調完成后,再調節待測鏡和CCD工業相機,最終讓平行光管、待測透鏡和CCD工業相機共軸。系統測量的正透鏡焦距范圍為30~225 mm,經過計算選用放大倍數為10倍的CCD工業相機鏡頭能符合測量范圍要求。
2 算法設計
2.1 圖像清晰度評價函數
圖像清晰度評價函數對CCD自動調焦技術起著至關重要的作用。自動調焦是建立在搜索算法上的調焦方法,通過編程對不同對焦位置所獲取的圖像進行清晰度的判別。聚焦速度和聚焦精度是判斷一個調焦方法好壞的重要標準。通過對傳統灰度差分算法的改進,提出了一種聚焦精度較傳統精度高的灰度差分算法。此外,將圖像中心截取1/4面積進行清晰度判別,這樣減少了圖像運算的像素點個數,減少了算法的運行時間,提高了聚焦的速度。
理想的圖像清晰度評價函數具有單峰性、無偏性等特點。常用的調焦評價函數[9-11]有灰度差分絕對值之和(SMD)、Vollath函數、梯度平方、TenenGrad函數、熵函數、Brenner函數等。假設圖像f(x,y)中某點的灰度值為I(x,y)。
(1)Brenner函數。
(4)
(2)Tenengrad函數。
Fk=∑∑[S(x,y)]2
(5)
其中
(6)
且S(x,y)>T,T為閾值。
(3)梯度向量平方函數。
(7)
其中
G(x,y)=[I(x+1,y)-I(x,y)]2
H(x,y)=[I(x,y+1)-I(x,y)]2
(8)
(4)Vollath函數。

(9)
(5)熵函數。
F=-∑pilogpi
(10)
其中,pi=Ni/N,N為圖像總的像素元素,pi為灰度值i出現的概率。當F值最大的時候圖像最清晰。
(6)灰度差分函數(SMD)。
(11)
其中
(12)
式(12)是傳統的灰度差分評價函數,只對灰度值水平和垂直方向做差。改進的灰度差分函數對像素I(x,y)的八鄰域做差值,八鄰域的位置如式(13)所示。

(13)
灰度差分絕對值只涉及加減法,便于實現,但是抗干擾能力不足,精準度不高。考慮到CCD對亮度信號的敏感性,以及選擇亮線黑底分劃板的情況,當圖像比較清晰時,圖片中亮度分量值較大;當圖像模糊時,圖片中的亮度分量值較小。所以,選擇八鄰域的灰度差分算法,增加了對周圍點的判斷,提高了聚焦精度。此外,為了提高清晰度判別速度,從圖片中心截取100×100像素矩陣做差分,減少了運算的點數。所以改進的函數如下所示。
(14)
其中


(15)


由圖3可以看出,ImproveSMD比SMD有著更好的聚焦精度,對圖像清晰度的評價更有優勢。此外,ImproveSMD雖然和Vollath函數具有相近的聚焦精度,但是改進的SMD的聚焦速度要好于Vollath函數。在選取100張圖片進行測試時,改進的SMD只要400 ms就能出結果,而Vollath要1.24 s才能出結果。所以綜合考慮聚焦精度和聚焦速度,選取改進的SMD作為實驗系統的圖像清晰度評價函數。
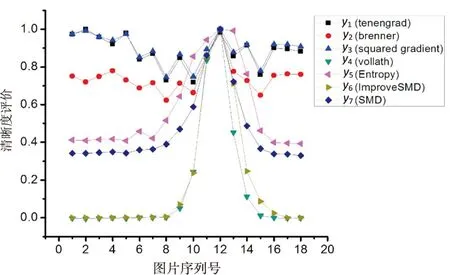
圖3 多種函數清晰度評價曲線圖
2.2 圖像特征的提取和測量
圖4是文中對圖像進行提取和測量的處理步驟。
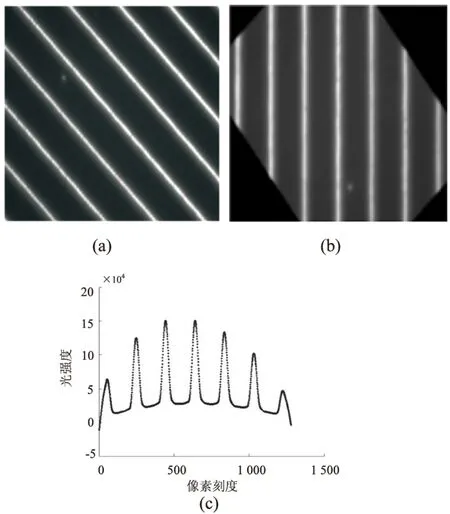
圖4 圖像處理過程
在采集的多張圖像中用改進的清晰度評價函數找出一張最清晰的圖片,如圖4(a)所示。由于系統采集到的圖片相對理想,所以利用簡單的非線性濾波器中值濾波完成去噪。然后進行圖像校正,步驟為:
(1)采用Canny算子進行邊緣檢測[12-13],該方法使用兩個閾值檢測強的和弱的邊緣,如果它們被連接到邊緣,那么輸出只包含弱邊緣。由于系統中成像清晰度較理想,邊緣輪廓簡單,所以采用Canny算子進行邊緣檢測。經過系統多次驗證,Canny算子能精確提取邊緣,效果能達到實驗系統要求。
(2)邊緣檢測后,需要進行直線的提取,把圖像邊緣的直線找出來。
(3)根據直線方程求出直線斜率,并計算出直線與垂直線間的夾角即為傾斜角,再根據這個夾角對圖像進行旋轉校正。校正后的圖像如圖4(b)所示。
考慮到分劃板做的比較精密,分劃板的刻線誤差很小,可以認為每條亮線的中心線就是灰度值最大的。對校正后的灰度圖像進行各列求和,這樣灰度圖像的行就是像素刻度值,列就是各列像素灰度值的累和。如圖4(c)所示,七個極值點對應著七條中心線的灰度和,橫軸表示像素刻度。相鄰極值點對應的橫軸坐標兩兩相減再求和,最后對多個間隔求平均,就可以計算出相鄰刻度線的間隔,然后根據式(3)就可以計算出透鏡焦距。多條線取平均值是一種減小誤差的好方法,對于提高系統的精度很有幫助。
2.3 像素標定
實驗系統中,圖像處理以像素為單位。所以,需要對像素進行標定,這樣才能求出測量焦距和像素之間的標定系數。
由式(3)可以得出,焦距與像素D之間滿足線性關系:f=AD+b。其中b為系統誤差。為了消除系統誤差,采用80mm和200mm的標準透鏡來確定A和b的值。
以焦距f1=80mm和f2=200mm在圖像最清晰處的每兩條刻線的像素間隔進行10次測量,對測得的結果求平均值,得出80mm的像素平均值D1=77.711 4,200mm的像素平均值D2=198.433 3。由f=AD+b可得:
b=f1-AD1
(16)
測試過程中多次測量像素間隔取平均值是為了減少誤差。計算出A=0.994 0 (mm/pix),b=2.754 9。
3 軟件設計
該實驗系統是用Matlab軟件開發的,系統主要由電控平移臺控制模塊、圖像采集和存儲模塊、圖像處理模塊和測量模塊組成。
軟件流程圖如圖5所示。
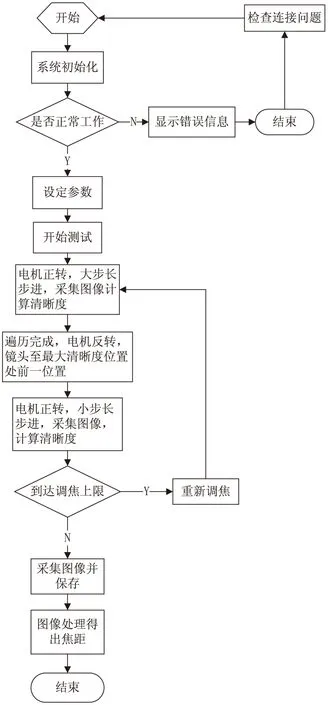
圖5 軟件系統流程圖
首先對CCD工業相機和電控平移臺進行初始化,然后開始測試。一開始電控平移臺從初始位置大步長朝遠離平行光管方向步進,用改進SMD計算最清晰像的位置;然后反方向步進回到最清晰位置前一個位置;再沿遠離平行光管方向進行小步進掃描,并用改進的SMD找出最清晰的像,提取圖像。圖像提取之后,經過圖像模塊的濾波、邊緣提取和圖像校正之后,通過測量直接算出焦距。
系統將CCD工業相機和電控平移臺通過USB接口連接筆記本,通過Matlab軟件控制電控平移臺的步進速度和精度,同時控制CCD拍照的張數,這就大大提高了自動化程度,并能快速測得焦距。
4 實驗結果
系統硬件和軟件設計完成后,開始進行實際測量。選取了透鏡焦距標準值為30mm,80mm,200mm和225mm進行測量,每組測4次。測量結果如表1所示。
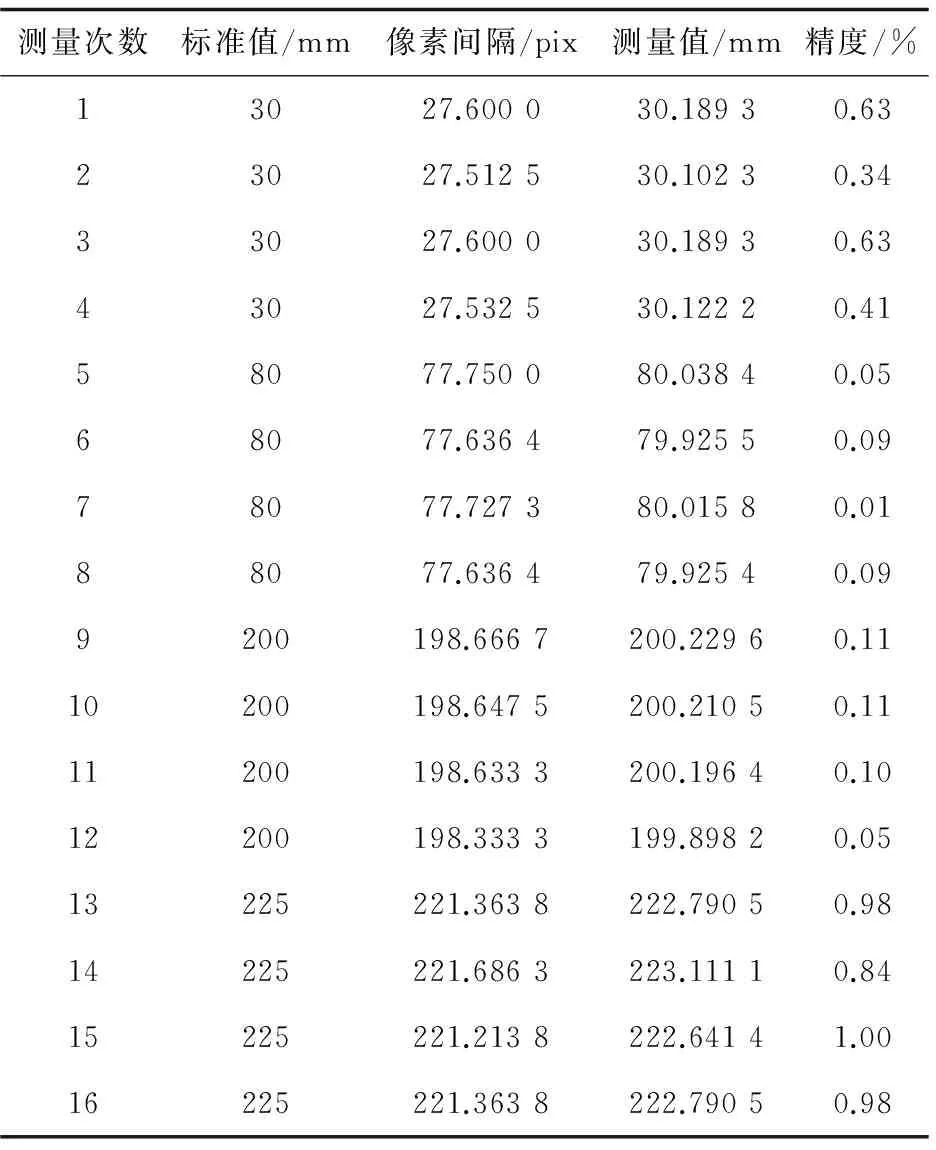
表1 測量結果
從表中可以看出,在經過像素標定后,系統在測量范圍為30~225mm間的相對誤差低于1%,表上只列出了4組測量結果。實際上,隨著測量次數不斷增加,在對每個透鏡經過20次測量后取平均值,得出了重復精度30mm在0.46%,80mm在0.05%,200mm在0.10%,225mm在0.92%。結果表明,系統利用較簡單的硬件搭建再配合軟件的處理,實現了符合實驗要求的對透鏡焦距較高精度的測量和低難度的操作,為后續焦距測量研究奠定了基礎。
5 結束語
為提高系統運行速度和焦距的測量精度,設計了用于實驗研究的基于CCD的透鏡焦距測量系統。該系統設計合理,搭建方便,測量速度快,測量精度高。系統加入了軟件控制,提高了自動化水平,方便操作。測量結果表明,實驗系統在范圍為30~225mm的透鏡焦距的測量中相對誤差控制在0.01%~1%,重復精度高于1%,聚焦速度是400ms,相較于傳統的聚焦算法快了3倍。
雖然實驗系統能實現較高精度的焦距測量,但是仍有兩個問題:一是在圖像采集過程中,容易受外界光照的影響,這就需要在后續硬件結構上進行改進,可以給硬件系統加工一個避光罩子,以保證系統圖像采集可以在一個穩定的環境中進行;二是相應的圖像測量算法還需進一步研究,以盡可能地降低像素誤差,提高測量精度。在后續軟硬件進一步改進之后,相對焦距誤差預計能達到0.10%。
[1] 饒世賢,劉仁明.一種簡單測量凸透鏡焦距的方法[J].大眾科技,2011(1):24-25.
[2] 尹 真,謝良星,黃明亮,等.用CCD測量凸透鏡焦距實驗的研究[J].宜春學院學報,2008,30(4):39-40.
[3] 王建偉,安志勇,段 杰,等.基于CCD的光學系統焦距自動測量技術[J].紅外與激光工程,2006,35(S):255-260.
[4] 林盛鑫,趙曉芳,楊 雷,等.基于紅外CCD的摻釓液體閃爍體液位測量方法[J].半導體光電,2016,37(2):294-297.
[5] 王鳳嬌,景文博,劉 學,等.一種基于圖像的光學系統測角精度檢測方法[J].長春理工大學學報:自然科學版,2016,39(1):71-76.
[6] 袁 婷,張 峰,陶小平,等.基于相位測量偏折術的反射鏡三維面形測量[J].光學學報,2016(2):101-107.
[7] 畢美華,劉文文.基于VC++6.0的IEEE1394CCD應用程序開發[J].現代顯示,2009(3):38-42.
[8] 吳小平,周起勃.大口徑長焦距平行光管系統及其裝校[J].光學儀器,1993,15(5):26-28.
[9]JiangXueping,ChengQian,XuZheng,etal.Quantitativemeasurementofacousticpressureinthefocalzoneofacousticlens-linefocusingusingtheSchlierenmethod[J].AppliedOptics,2016,55(10):2478-2483.
[10]BenoitA,CalletPL,CampisiP,etal.Qualityassessmentofstereoscopicimages[J].EURASIPJournalonImageandVideoProcessing,2009(1):1-13.
[11] 尤玉虎,劉 通,劉佳文.基于圖像處理的自動對焦技術綜述[J].激光與紅外,2013,43(2):132-136.
[12]MiaoC,ChaiZH,SunXL,etal.Retinalvesselcenterlinetrackingusingbilateralfilterandcannyedgedetector[J].InformationRecordingMaterials,2010,11(4):26-30.
[13]AkinlarC,ChomeE.CannySR:usingsmartroutingofedgedrawingtoconvertCannybinaryedgemapstoedgesegments[C]//Internationalsymposiumoninnovationsinintelligentsystemsandapplications.[s.l.]:IEEE,2015:1-6.
Design of Experiment System for Focal Length Measurement ofLens Based on CCD
GUO Zhen-yu,XIE Na,HE Peng-ju,WANG Xi-ling,CHEN Jing,XU Rong-qing
(College of Electronic Science and Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
The CCD-based experiment system is based on the traditional magnification method to measure the focal length and it uses CCD instead of the human eyes to achieve digital measurement.Meanwhile,the motor control console is used for stepper precision which significantly improves the accuracy and automation.The key to focal length measuring system is whether it can meet the real-time and focus accuracy in image clarity evaluation function.An improved definition evaluation algorithm called improved gray-difference evaluation has been proposed to improve the speed and accuracy of evaluation algorithm.And the quality of system has also been improved.Optical imaging system has been built in experiment and Matlab is used as a software development platform.It is convenient to set up the experiment system with high degree of automation and easy operation.Experimental results show that the system is accurate to measure the focal length of positive lens and the requirements of experiments have been met which the focus time of improved evaluation function is 3 times faster than traditional definition evaluation and that repeatability of measurement accuracy is better than 1%.
CCD;definition evaluation;focal length;experiment system
2016-05-25
2016-08-31 網絡出版時間:2017-03-13
國家自然科學基金資助項目(11304159);教育部博士點基金項目(20133223120006)
郭振宇(1991-),男,碩士研究生,研究方向為數字圖像處理和光通信技術;謝 娜,講師,研究方向為光信息處理;徐榮青,教授,通訊作者,研究方向為光傳感技術、光通信技術和光信息處理。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170313.1545.020.html
TN06
A
1673-629X(2017)05-0174-05
10.3969/j.issn.1673-629X.2017.05.036
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45