利用虛擬觀測提升自動轉移飛行器導航精度
2017-06-15 14:34:19王鼎杰呂漢峰
宇航學報 2017年5期
關鍵詞:信息
王鼎杰,呂漢峰,吳 杰
(國防科技大學航天科學與工程學院軍事航天系,長沙410073)
利用虛擬觀測提升自動轉移飛行器導航精度
王鼎杰,呂漢峰,吳 杰
(國防科技大學航天科學與工程學院軍事航天系,長沙410073)
針對自動轉移飛行器(ATV)自主導航過程中的高精度要求,提出了一種利用加表虛擬觀測信息輔助捷聯慣性(SINS)/天文(CNS)的組合導航方案。該算法利用了ATV無動力軌道飛行時的完全失重條件來改進SINS導航動力學方程,并獲取加表零偏虛擬觀測信息,從而實現導航狀態的精確估計。不同更新率SINS/CNS/虛擬觀測等多源信息融合采用了擴展Kalman濾波方法。ATV典型軌道仿真結果表明,虛擬觀測信息的引入使ATV純慣性導航定位、定速精度分別提升了82.33%和 93.87%,使SINS/CNS組合導航定位、定速精度分別提升了98.35%和98.72%,定姿精度相應地維持不變。加表虛擬觀測的引入使SINS在不增添其他傳感器的情況下提升了導航精度,降低了SINS對外測信息的依賴性,具有重要實用價值。
捷聯慣性導航(SINS); 天文導航(CNS); 組合導航; 虛擬觀測; 自動轉移飛行器(ATV)
0 引 言
自動轉移飛行器(Automated transfer vehicle,ATV)是一類可以穿梭在不同軌道高度上的飛行器,是實現諸如空間碎片捕獲、衛星回收與在軌維護、星際航行探索等空間任務的一種重要工具[1]。在支撐ATV完成空間任務的各種技術中,導航技術是決定其效能的關鍵。
傳統導航方案采用慣性導航系統(Inertial navigation system,INS)自主、實時、連續地提供載體的位置、速度和姿態信息,然而由陀螺零偏和加表零偏引起的導航誤差隨時間不斷積累,故單一慣性導航技術已不能滿足ATV的高精度導航需求。因此,對于高精度ATV導航,必須采用組合導航方案。目前,通常采用衛星導航系統(Global navigation satellite system,GNSS)作為高精度外測信息源在線校準INS,但是GNSS易受電磁干擾、導航信息連續性較低且無法用于高軌衛星。與GNSS類似,作為無線電外測信息的地基偽衛星系統,其實現和維護均比GNSS容易,但其導航空域及性能受限于地面上地基偽衛星站的個數、位置及分布。以上劣勢限制了無線電導航在ATV上的應用。不同于無線電導航,天文導航(Celestial navigation system,CNS)利用星光觀測信息、完全自主地實現高精度姿態測量,因而INS/CNS組合導航系統廣泛應用于各種空間飛行器導航與制導[2-3]。目前,INS/CNS組合導航與制導系統已成功應用于美國三叉戟I和前蘇聯SS-N-8、SS-N-18、SS-N-20等潛射彈道導彈,CEP精度達到500m以內[4-5]。近年來,得益于光電技術最新進展而出現的捷聯慣性導航系統(Strapdown inertial navigation system,SINS),利用星光信息修正SINS姿態誤差、校準陀螺零偏、提升導航精度,正逐步替代精度相當的平臺式慣導系統[6]。作為一種極具潛力和實用價值的導航方式,SINS/CNS組合有望解決ATV高精度導航需求。
然而,在SINS/CNS組合導航實現問題中,僅采用星敏姿態修正SINS的組合導航方法能夠實現高精度實時定姿[7],卻因不能估計加表零偏而造成位置、速度等導航狀態誤差的發散。文獻[8-13]提出采用天文觀測角構建載體所處經度和緯度的觀測方程,由此對加表零偏在線估計。但是該方法需要直接敏感地平,這對于ATV導航場景存在局限性。文獻[14-18]提出采用間接敏感地平方式,利用星光折射信息建立視高度與飛行器位置、姿態的觀測方程,實現對加表和陀螺零偏在線標定,該方法仿真導航精度可達百米級。然而,這一結果是在不考慮大氣密度模型誤差的條件下獲得的,實際中不可避免的大氣密度模型誤差會對星光折射角或折射星視高度的計算引入不可忽略的系統性誤差。因此,這一方法距離工程實用還有一定距離。
值得注意的是,文獻[8-18]均未考慮載體運動過程中的動力學約束信息,限制了實際導航精度的提升效果。實際上,ATV絕大部分時間處于無動力飛行階段,即視加速度的理論輸入為零,則這個過程中加表的輸出值實際上相當于其零偏的觀測值。本文將研究含ATV動力學模型約束的SINS/CNS組合導航問題,利用約束信息改進并推導了ATV導航動力學方程和觀測方程,采用EKF對該階段的SINS系統零偏進行估計和修正,實現不引入其他傳感器的條件下,利用加表虛擬觀測信息提升ATV導航精度。
1 基于飛行模式的捷聯慣性導航基本方程
在地心慣性坐標系(J2000.0)i系中描述ATV運動規律,其捷聯慣性導航基本方程為[6]:
(1)
(2)
在采用地球橢球模型的情況下考慮二階帶諧項,則gi可表示為
(3)
式中:J2為二階帶諧系數;Re為地球赤道半徑;μ為地球引力常數;I為單位矩陣;c為常數對角矩陣且c=diag(1.5,1.5,4.5);r為位置矢量ri的模長;z為位置矢量ri的z軸分量。
按照ATV飛行過程中的受力特性,可以將其飛行過程劃分為有動力飛行階段和無動力飛行階段。有動力飛行主要分布在大氣層內飛行、大氣層外變軌或調姿等發動機工作的短暫飛行時間內,而無動力飛行階段則屬于長時間的無動力軌道飛行。為降低慣性導航誤差的傳播,在無動力飛行過程中解算位置速度時可將加表輸出項置零,即將式(1)改寫為:
(4)
式中:c=1或0。當ATV處在有動力段時c=1,處于無動力段時c=0。ATV處在有動力還是無動力飛行段可根據發動機開關指令進行判斷。
2 加表虛擬觀測信息輔助慣性/天文組合導航模型
傳統SINS/CNS組合導航是以CNS輸出姿態失準角信息為觀測量,以SINS/CNS誤差方程為狀態方程,構造Kalman濾波器實現最優估計[8-12]。然而,該方法不能準確估計加表零偏狀態量,從而影響ATV位置、速度的精確估計。本文通過構造虛擬觀測信息,實現在導航過程中對加表零偏進行估計和修正,由此可以一定程度上提高飛行器的導航精度。
2.1 系統動力學模型
SINS/CNS組合導航選用慣性系(J2000.0),選取位置誤差δri、速度誤差δvi、失準角θ、陀螺零偏bω、加表零偏bf和星敏安裝失準角θs等構成系統狀態變量。對式(4)擾動分析,且假設星敏安裝失準角不隨時間變化,由此可得系統誤差方程為:
(5)
式(5)的矩陣形式可表示為
(6)
式中:
對式(6)進行離散化,只保留一階項可得:
(7)

(8)
式中:Qk為慣性器件隨機測量噪聲協方差矩陣,由表1中加表、陀螺穩定性指標確定。
2.2 觀測模型
2.2.1 姿態觀測模型
在ATV離開大氣層后,星敏感器開始工作并輸出姿態失準角信息。由星敏感器安裝失準角和定姿誤差定義可知:
(9)
(10)
(11)
其中,ε為姿態測量噪聲,其協方差E{εεT}表征星敏感器的定姿精度(由星敏器件精度決定)。
2.2.2 加表虛擬觀測模型

(12)
式中:fb是加表理論測量值,在無動力飛行段其值為零,則無動力飛行階段加表零偏的觀測方程為:
(13)
因此,以式(7)為系統狀態方程,在有動力飛行時間內,采用式(11)構建觀測方程;而在無動力飛行過程中則采用式(11)和式(13)聯立構建觀測方程,即可采用經典卡爾曼濾波進行組合導航。
3 仿真校驗
仿真生成一條典型ATV飛行軌道,假定ATV從酒泉衛星發射中心發射,并通過軌道調整經低軌、中軌,最終飛至高軌。為保證ATV飛行過程中大部分時段對我國境內地面觀測站可見,設計的ATV仿真軌道如圖1~3所示。
ATV初始飛行時刻為2015年3月16日12時0分0秒(UTC),整個飛行時間為18000s,飛行終點處距地面約為4.0×104km,導航坐標系采用J2000.0坐標系。采用文獻[1]中的設置,自動轉移飛行器在經過低軌、中軌到達高軌的過程中共進行了3次短時間的軌道機動,軌道調整發動機產生的加速度大小為0.25m/s2,作用的時間段分別為800s~1000s、5400s~5600s和17000s~17200s。
為檢驗算法的有效性,分別針對純慣性導航和SINS/CNS組合導航兩種情形展開仿真研究。相關導航仿真參數如表1所示,設置星敏感器相對于慣導體系安裝失準角精度為20″,設定在主發動機關機后且自動轉移飛行器飛出大氣層后,星敏感器開始工作。假設姿態機動不影響加表測量。
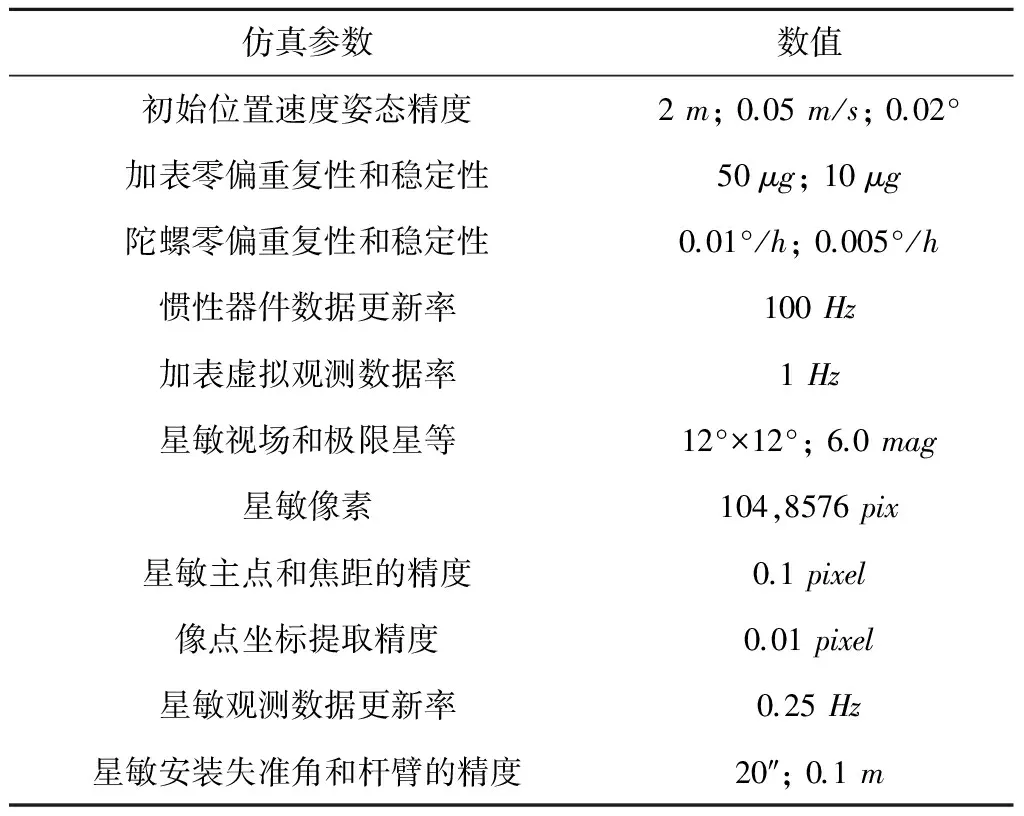
表1 ATV典型軌道導航仿真參數設置Table 1 ATV representative orbit simulation parameters
3.1 算例1:純SINS導航
ATV采用純慣性導航方式,通過引入加表虛擬觀測信息,對比研究該約束條件對純SINS導航精度的提升作用。采用Monte Carlo打靶試驗100次,得到導航過程中三維位置、速度和姿態誤差如圖4所示,其中每條藍色虛線表示一次打靶結果,實線表示3σ線。由圖4可知,打靶結果均處于3σ線以下,由此得到如表2所示的均方根誤差精度指標。
由表2可知,虛擬觀測信息的輔助使ATV純SINS定位精度提升了82.33%,定速精度提升了93.87%,定姿精度維持不變。這是因為加表虛擬觀測抑制了加表零偏帶來的發散,而對陀螺零偏沒有直接影響。仿真結果表明,加表虛擬觀測信息使得SINS在不引入其他傳感器的條件下,提升了SINS導航精度,降低了SINS對外測信息的依賴性。
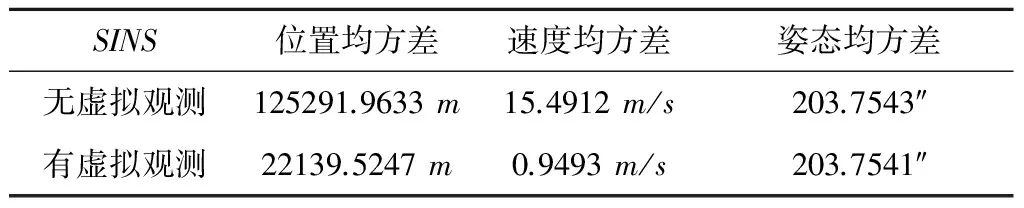
表2 ATV典型軌道純慣性導航RMSE精度對比Table 2 Root-square-mean errors comparison for SINS-only simulation
3.2 算例2:SINS/CNS組合導航
ATV采用SINS/CNS組合導航方式,通過引入加表虛擬觀測信息,對比研究該約束條件對SINS/CNS組合導航精度的提升作用。采用Monte Carlo打靶試驗100次,得到導航過程中三維位置、速度和姿態誤差如圖5所示,其中每條虛線表示一次打靶結果,實線表示3σ線。由圖5可知,打靶結果基本均處于3σ線以下,由此可得到如表3所示的均方根誤差精度指標。由式(5)可知,加表零偏對安裝失準角沒有影響,也即虛擬觀測引入與否對安裝失準角估計不產生影響。安裝失準角估計情況見圖5(c)。
由表3可知,虛擬觀測信息的輔助使SINS/CNS組合定位精度提升了98.35%,定速精度提升了98.72%,定姿精度維持不變。將表3與表2對比可得:第一,在無虛擬觀測信息時,CNS信息源的引入主要提升了系統定姿精度(99.92%),而對定位精度(1.56%)和定速精度(0.22%)略有提升。第二,在利用虛擬觀測時,CNS的引入使得ATV導航定位、定速、定姿精度分別提高了90.83%、79.22%和99.92%。仿真結果表明,加表虛擬觀測信息在不增添其他傳感器的條件下,極大提升了傳統SINS/CNS導航精度。

表3 ATV典型軌道SINS/CNS組合導航RMSE精度對比Table 3 Root-square-mean errors comparison for SINS/CNS integrated simulation
4 結 論
針對自動轉移飛行器高精度自主導航應用背景,本文提出了一種利用加表虛擬觀測信息增強傳統捷聯慣導/天文組合導航精度的方法。該方法基于ATV無動力軌道飛行中的完全失重條件來改進SINS導航動力學方程、建立加表零偏虛擬觀測信息,并構建擴展Kalman濾波器對不同更新率的SINS/CNS/虛擬觀測等多源信息融合,實現導航狀態的最優估計。從仿真結果可知,虛擬觀測信息的引入使ATV純慣性導航定位、定速精度分別提升了82.33%和 93.87%,使SINS/CNS組合導航定位、定速精度分別提升了98.35%和98.72%,定姿精度相應地維持不變。因此,采用加表虛擬觀測信息可以在不增添傳感器的情況下提升SINS導航精度,降低了SINS對外測信息的依賴性,具有重要的實用價值。
[1] 溫永智. 高軌自動轉移飛行器導航方法研究[D]. 長沙: 國防科學技術大學, 2011. [Wen Yong-zhi. Navigation methods for automated transfer vehicle on high earth orbits [D]. Changsha: National University of Defense Technology, 2011.]
[2] Quan W, Li J L, Gong X L, et al. INS/CNS/GNSS integrated navigation technology [M]. Beijing: Springer, 2015.
[3] 葉兵, 張洪波, 吳杰. 單星星光/慣性復合制導最佳星快速確定方法研究[J]. 宇航學報, 2009, 30(4):1371-1375. [Ye Bing, Zhang Hong-bo, Wu Jie. Study on quick ascertaining method of optimal single star in celestial-inertial integrated guidance [J]. Journal of Astronautics, 2009, 30(4): 1371-1375.]
[4] Zhang L J, Yang H B, Zhang S F, et al. Strapdown stellar-inertial guidance system for launch vehicle [J]. Aerospace Science and Technology, 2014, 33(1): 122-134.
[5] Zhang H B, Zheng W, Tang G J. Stellar/inertial integrated guidance for responsive launch vehicles [J]. Aerospace Science and Technology, 2012, 18(1): 35-41.
[6] David H T, John L W. Strapdown Inertial Navigation Technology [M]. London: Peter Peregrinus, 2004.
[7] 王新國, 許化龍, 李愛華. 一種應用于星光觀測導航姿態確定的強跟蹤濾波算法[J]. 宇航學報, 2008, 29(3):873-877. [Wang Xin-guo, Xu Hua-long, Li Ai-hua. A novel strong tracking EKF algorithm in application of missile attitude determination by star observations [J]. Journal of Astronautics, 2008, 29(3): 873-877.]
[8] Jamshaid A, Fang J C. Realization of an autonomous integrated suite of strapdown astro-inertial navigation systems using unscented particle filtering [J]. Computers and Mathematics with Applications, 2009, 57(2): 169-187.
[9] Xu F, Fang J C. Velocity and position error compensation using inertial navigation system/celestial navigation system integration based on ensemble neural network [J]. Aerospace Science and Technology, 2008, 12(4): 302-307.
[10] Ning X L, Liu L L. A two-mode INS/CNS navigation method for lunar rovers [J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(9): 2170-2179.
[11] He Z, Wang X L, Fang J C. An innovative high-precision SINS/CNS deep integrated navigation scheme for the Mars rover [J]. Aerospace Science and Technology, 2014, 39: 559-566.
[12] Guan X J, Wang X L, Fang J C, et al. An innovative high accuracy autonomous navigation method for the Mars rovers [J]. Acta Astronautica, 2014, 104(1): 266-275.
[13] 熊智, 劉建業, 郁豐, 等. 基于天文角度觀測的機載慣性/天文組合濾波算法研究[J]. 宇航學報, 2010, 31(2):397-403. [Xiong Zhi, Liu Jian-ye, Yu Feng, et al. Research of airborne INS/CNS integrated filtering algorithm based on celestial angle observation [J]. Journal of Astronautics, 2010, 31(2): 397-403.]
[14] Qian H M, Sun L, Cai J N, et al. A novel navigation method used in a ballistic missile [J]. Measurement Science and Technology, 2013, 24(10): 1366-1374.
[15] Qian H M, Sun L, Cai J N, et al. A starlight refraction scheme with single star sensor used in autonomous satellite navigation system [J]. Acta Astronautica, 2014, 96(1): 45-52.
[16] Ning X L, Wang L H, Bai X B, et al. Autonomous satellite navigation using starlight refraction angle measurements [J]. Advances in Space Research, 2013, 51(9): 1761-1772.
[17] Yang S J, Yang G L, Zhu Z L, et al. Stellar refraction-based SINS/CNS integrated navigation system for aerospace vehicles [J]. Journal of Aerospace Engineering. 2016, 29(2): 1-11.
[18] 寧曉琳, 王龍華, 白鑫貝, 等. 一種星光折射衛星自主導航系統方案設計[J]. 宇航學報, 2012, 33(11):1601-1610. [Ning Xiao-lin, Wang Long-hua, Bai Xin-bei, et al. A scheme design of satellite autonomous navigation system based on stellar refraction [J]. Journal of Astronautics, 2012, 33(11): 1601-1610.]
通信地址:湖南省長沙市開福區德雅路109號(410073)
電話:(0731)84573139
E-mail:wangdingjie11@nudt.edu.cn
吳 杰(1964-),男,博士,教授,主要從事高精度衛星導航研究。本文通信作者。
通信地址:湖南省長沙市開福區德雅路109號(410073)
電話:(0731)84573139
E-mail:wujie_nudt@sina.com
(編輯:牛苗苗)
Accuracy Enhancement of SINS/CNS Integrated Navigation Using Virtual Observations for Automated Transfer Vehicles
WANG Ding-jie, LV Han-feng, WU Jie
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
A method for designing accurate autonomous navigation system is proposed in this paper for automated transfer vehicles (ATV). This paper devises an accuracy enhancement approach for traditional integrated navigation of a strapdown inertial navigation system (SINS) and a celestial navigation system (CNS) with the virtual observations. This approach benefits from the use of the fact that ATV is in complete weightlessness in orbit without maneuvers. The improved state equations and virtual observation equations are established based on such a constraint, and an extended Kalman filter is used to accomplish the state estimation from SINS, CNS and virtual observations in different data rates.The simulation results indicate that the proposed algorithm can improve both the position and velocity accuracies without loss of attitude estimation accuracy by about 82.33% and 93.87% compared with standalone inertial navigation, by about 98.35% and 98.72% compared with traditional SINS/CNS integration. The introduction of virtual observations can resist the divergence of position and velocity errors due to inaccurate accelerometer bias estimation effectively. This is of significant importance in engineering because the navigation accuracy is improved without the aid of other sensors, meaning it reduces the reliance on the external information for SINS.
Strapdown inertial navigation system (SINS); Celestial navigation system (CNS); Integrated navigation; Virtual observation; Automated transfer vehicle (ATV)
2016-09-18;
2017-03-22
國防科學技術大學優秀研究生創新資助項目(B140103)
V448.22+4
A
1000-1328(2017)05-0526-07
10.3873/j.issn.1000-1328.2017.05.011
王鼎杰(1990-),男,博士生,主要從事慣性導航及組合導航研究。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
