飛機舵面液壓助力器及舵面系統建模與性能仿真
2017-06-15 17:16:54鄧支強喬晉紅
中國機械工程 2017年7期
陳 劍 鄧支強 喬晉紅
合肥工業大學噪聲振動工程研究所,合肥,230009
飛機舵面液壓助力器及舵面系統建模與性能仿真
陳 劍 鄧支強 喬晉紅
合肥工業大學噪聲振動工程研究所,合肥,230009
以某型飛機飛行操縱系統典型液壓助力器為研究對象,建立了液壓助力器及舵面系統仿真分析模型。綜合考慮油液剛度、結構剛度、摩擦、泄漏等非線性因素對系統的影響,推導出包含負載、活塞、缸體和閥芯動態的系統模型。針對助力器及舵面系統穩定性和靜動態特性展開分析研究,闡述了關鍵參數對系統性能和穩定性的影響。仿真結果表明,該系統穩定性良好,響應迅速,具有良好的靜動態性能。
液壓助力器;飛行控制;穩定性;靜動態特性
0 引言
飛行操縱控制系統中的液壓助力器是飛行控制系統的重要組成部分,其性能的好壞及可靠性直接影響飛機和飛行控制系統的性能及安全[1-2]。液壓助力器及控制舵面系統動態特性的研究,對于解決長期存在的飛機平尾抖動問題,提升新品種設計性能及保障飛行安全具有重要意義。
液壓助力器屬于機液位置伺服系統,是典型的非線性機液系統[3]。對此系統作總體考慮,先建立助力器及舵面系統的仿真模型,再根據實際的設計、樣機、工作狀況來構建系統模型,提高模型的精度,這樣,一些復雜的因素如間隙、動靜摩擦、阻尼和泄漏等因素就都可找到合適的解決方法[4]。
1 助力器及控制舵面建模
飛機舵面操縱系統使用的液壓伺服作動器是一種機液位置伺服系統,由液壓動力單元的閉合機械反饋機構構成反饋控制系統[3]。助力器主要由四邊滑閥、對稱液壓缸及反饋機構組成,工作原理如圖1所示。
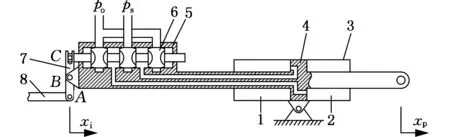
1.液壓油腔1 2.液壓油腔2 3.缸體 4.活塞 5.活塞桿殼體 6.閥芯 7.搖臂 8.拉桿圖1 助力器原理圖Fig.1 Principle diagram of hydraulic booster
無輸入時,搖臂7處于垂直位置,閥芯6中立,阻斷連接液壓缸1腔、2腔的油路,活塞4位移被鎖定。假設拉桿8對系統有一個向右的位移xi,此時活塞及活塞桿組件由于摩擦和慣性,并不產生運動,則搖臂7只能繞B點逆時針轉動一定角度,于是滑閥閥芯便相對于活塞桿殼體5向左運動一定位移xv,從而打開液壓缸1腔、2腔的油路。此時,1腔與進油路連通,2腔與回油路連通。在兩腔液壓油壓力差的驅動下,活塞向右運動。此運動使搖臂7繞A點順時針轉動(外界輸入停止,A點相當于固定點),于是閥芯相對于活塞桿殼體向右運動使閥芯位移xv減小,直到閥芯再次將兩腔油路阻斷,閥芯回到中立位置,搖臂7重新轉到垂直位置,活塞也相應停止不動。拉桿反向運動亦然,系統以此保持活塞輸出位移xp與拉桿輸入位移xi的一一對應。
液壓助力器及舵面控制系統根據具體的反饋機構,布置形式有多種,現以典型的結構形式加以分析說明。圖2所示為助力器及舵面控制系統模型和等效模型。圖2中,Mp為活塞及桿慣量;Mc為缸體慣量;ML為等效慣性負載;KL為等效彈性負載;Kss為缸體支撐結構剛度;Kst為連接結構剛度;ps為額定工作壓力;p0為額定回油壓力;Bp為活塞黏性阻尼;BL為等效阻尼負載;Bss為缸體支撐結構阻尼;Bst為連接結構阻尼;xc為缸體位移;xL為負載位移;Cip為內泄漏系數;Cep為外泄漏系數;q1為流入1腔的流量;q2為流入2腔的流量;p1為1腔的油壓壓力;p2為2腔的油壓壓力。
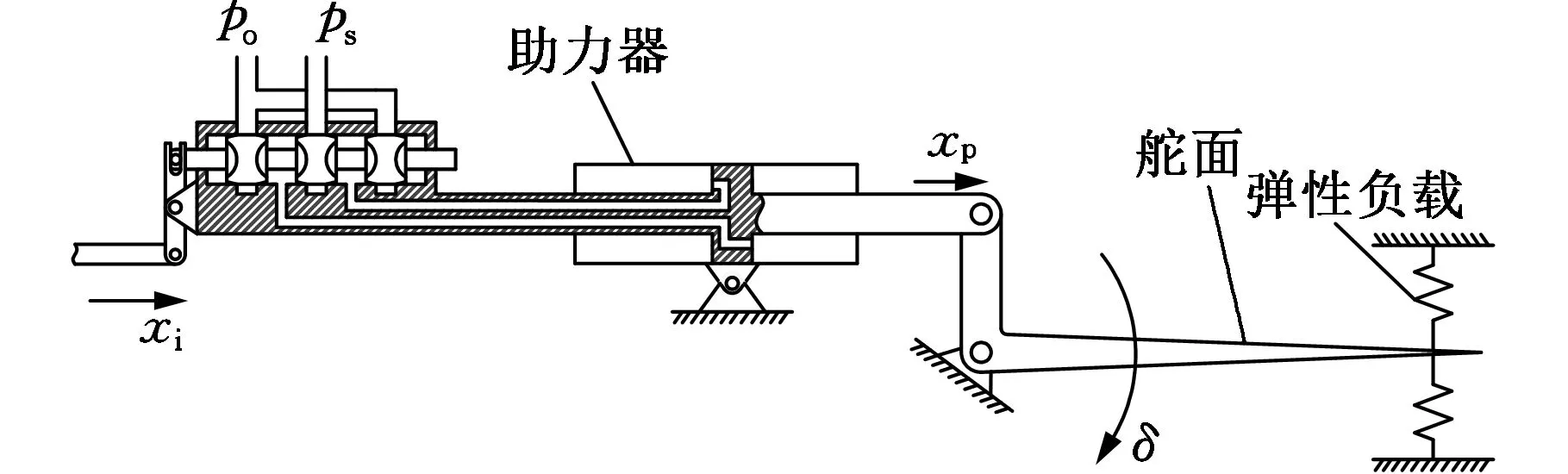
(a)系統模型
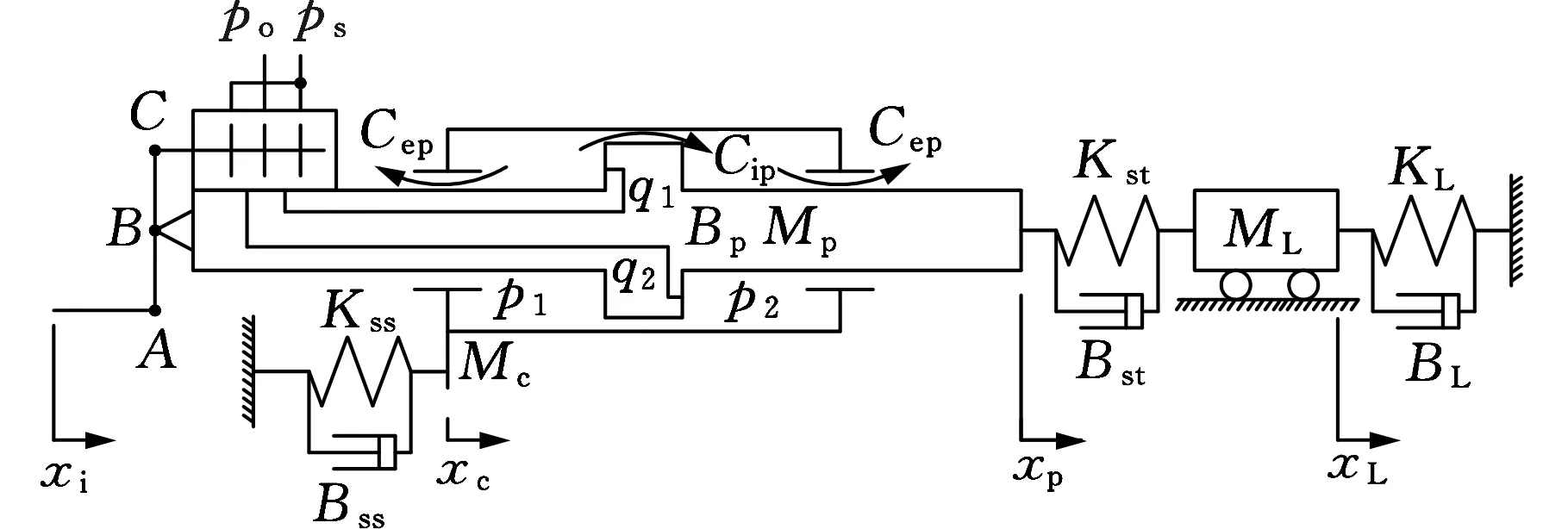
(b)等效模型圖2 助力器及控制舵面模型Fig.2 Model of booster and rudder
1.1 滑閥模型
滑閥作為系統中的功率放大元件,其設計的合理與否對系統的性能有著決定性的影響[3]。為簡化助力器常用的零開口四邊滑閥反饋機構的建模,將搖臂部分的質量及阻尼折算到滑閥模型中,最終得到如下滑閥模型:
(1)
式中,Fi為驅動力;Mv為閥芯、閥腔流體及前置機構折算質量;Bv為閥芯/套黏性阻尼及反饋機構阻尼系數;Kf為穩態液動力剛度;FL為負載力。
由式(1)可知,在該子模型中需要設置慣量、阻尼、動靜摩擦等主要參數以模擬閥芯的動態過程。穩態液動力的計算與閥芯凸肩工作邊的形式及滑閥開口梯度有關,關系到滑閥的具體設計。閥口的流量特性要用液壓元件閥芯閥套組合子模型來模擬。本文采用零開口四邊滑閥,穩態液動力Fs=2CvCdW(ps-pf)xvcosθ=Kfxv[5],其中,W為滑閥面積梯度;Cv為流速系數;Cd為流量系數;pf為負載壓力;θ為滑閥節流口射流角。為保證流量與閥芯開度的線性關系,采用矩形過流窗口形式。在閥芯子模型中設置閥芯頸部直徑、閥芯凸肩直徑、開口梯度、閥芯工作邊圓角半徑和閥芯閥套間隙等設計參數,由此給定滑閥的流量特性:
當活塞正向運動(xv≥0)時,有
(2)
當活塞反向運動(xv<0)時,有
(3)
式中,ρ為油液密度。
1.2 反饋機構模型
由前文的工作原理可知,活塞的輸出位移通過搖臂反饋給閥芯。在閥芯建模時已將搖臂的慣量折算到閥芯上,故此處不必再建立搖臂的動態模型,只需要表明反饋關系即可。系統的實時誤差
e=KiRxi-KfRxp
(4)
式中,KiR、KfR分別為輸入比與反饋比。
搖臂施加給閥芯的驅動力
Fi=(e-xv)Kr
(5)
式中,Kr為搖臂剛度;e-xv為閥芯實時誤差。
由于將位移反饋改為力反饋,故需采用彈簧子模型模擬搖臂剛度,增益元件和比較元件表達反饋關系。
1.3 液壓缸模型
助力器通常采用對稱雙桿結構保障雙向運動一致性[6]。建模關鍵是要體現活塞及活塞桿組件和缸體的動態特性和流量連續性,它們分別由液壓缸的動力參數和結構參數決定[7-9]。
1.3.1 活塞及活塞桿組件和缸體動態特性建模
活塞及活塞桿組件力平衡方程為
(6)
缸體力平衡方程為
(7)
式中,Ap為活塞有效面積。
由式(6)、式(7)可知,活塞及活塞桿組件和缸體的動態特性可以由其慣量、阻尼和剛度來表征,本文采用相應形式的質量塊子模型及彈簧子模型完成動態特性建模。
1.3.2 液壓缸流量連續性方程
對液壓缸的流量特性進行精確建模需要考慮缸體的位移、油液的壓縮性和液壓缸的內外泄漏[10-11]。綜合以上因素,液壓缸流量連續性方程為
(8)
式中,Ey為有效油液彈性模量;V1、V2分別為液壓油腔1、2的容積。
液壓缸的流量特性主要由其結構設計參數決定,本文采用活塞子模型、泄漏子模型及可變容積子模型來完成建模。主要參數有活塞及活塞桿的直徑、活塞寬度、活塞與缸體間的間隙和等效缸體體積彈性模量。
1.4 負載動態特性模型
負載主要有三類,即慣性負載、彈性負載和阻尼負載。在AMESim中,可用質量塊子模型、彈簧子模型和阻尼子模型來模擬以上負載。負載力平衡方程為
(9)
由式(9)可知,根據慣量、阻尼和剛度,再結合前系統的連接剛度和阻尼即可以模擬負載部分的動態特性。
2 系統仿真
通過上述分析,結合助力器的具體結構形式,建立系統仿真模型,如圖3所示。
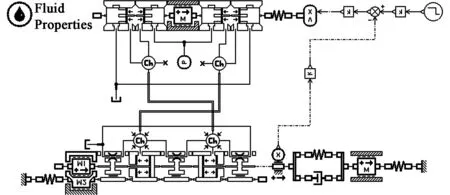
圖3 助力器及舵面系統AMESim仿真模型Fig.3 AMESim simulation model of booster an rudder system
以某型液壓助力器的結構參數和工作條件為基礎構成本文模型的基本輸入參數,主要參數如表1和表2所示。
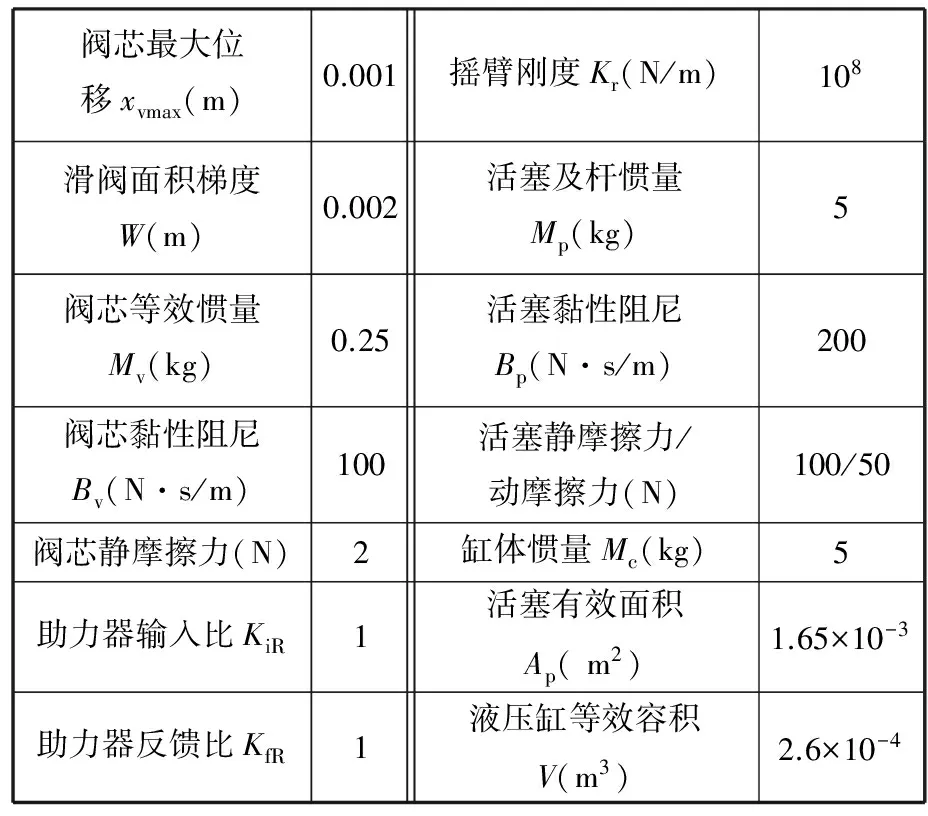
表1 助力器參數Tab.1 Parameter of hydraulic booster
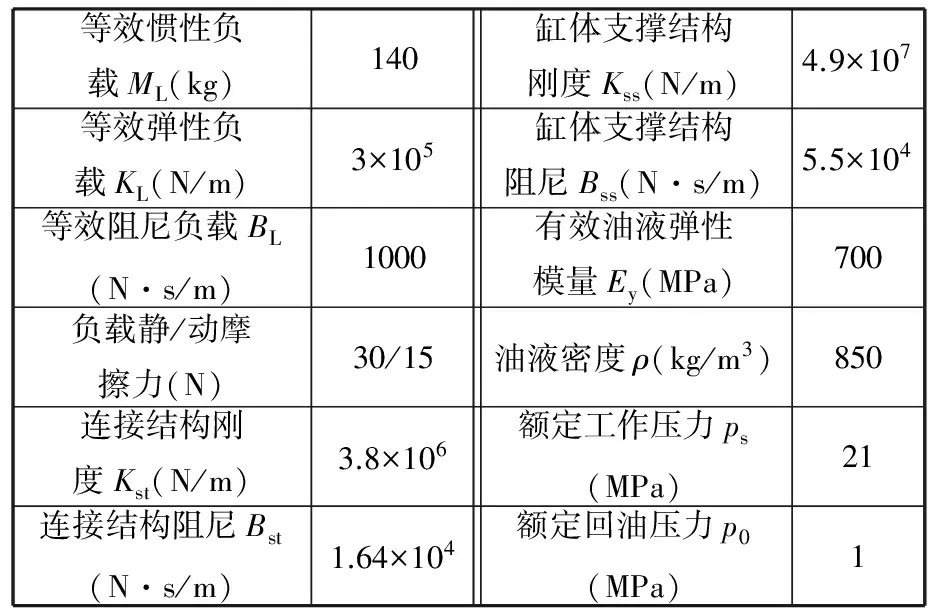
表2 外部參數Tab.2 External parameter
完成參數設置后進入仿真模式運行仿真。在進行分析時,需注意設置線性化時刻及控制變量和觀測變量。
3 仿真結果與分析
3.1 關鍵參數分析
(1)滑閥面積梯度W與閥芯最大位移xvmax決定滑閥的最大流通面積,從而決定活塞的最大運動速度。面積梯度直接影響流量增益Kq,即決定了系統的開環放大系數和系統的響應時間常數。閥芯位移即為系統的跟隨誤差。在規定的最大運動速度下,面積梯度大時,系統響應迅速,跟隨誤差小,但穩定性差;面積梯度小時,則結果正好相反。W對活塞單位階躍響應的影響如圖4所示。這兩個參數在系統快速性、準確性和穩定性方面需統籌考慮。

圖4 不同面積梯度下活塞單位階躍響應Fig.4 Piston unit step response under different area gradient
(2)系統位移反饋比KfR。該參數的存在使系統由開環變為閉環伺服控制,它對閉環系統的穩定性具有重要的影響。大的反饋系數使系統更加靈敏,但難以保證系統的穩定;而減小反饋系數,將減小反饋增益,增大跟蹤誤差。圖5所示為反饋比對系統響應的影響。

圖5 不同反饋比下活塞單位階躍響應Fig.5 Piston unit step response under different feedback ratio
(3)系統中各處存在的阻尼是典型的軟參數,對系統的穩定性有著重要的影響,通常需要根據經驗或是實測數據來設定。如果設計有阻尼器,則可根據設計值來設定阻尼值。從圖6中可以看出,增大阻尼能使系統變得更穩定,但會犧牲快速性能。
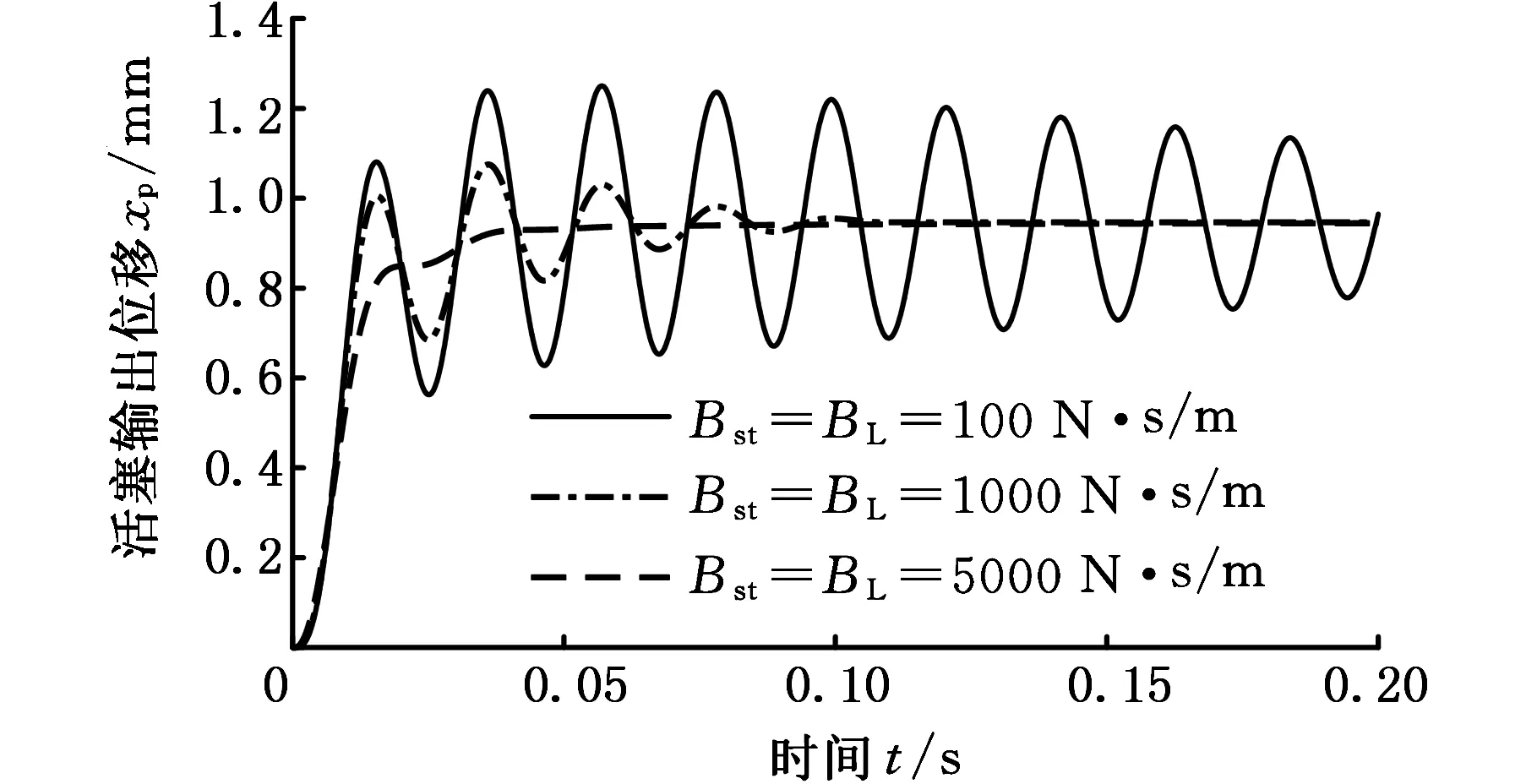
圖6 不同阻尼下負載單位階躍響應Fig.6 Load unit step response under different damping
3.2 時域響應與分析
階躍幅值取閥芯最大開度值1 mm,在0 s處觸發階躍信號,仿真時間為0.2 s,通信間隔為0.0001 s,進行階躍信號仿真,階躍響應曲線如圖7所示。由圖7可知,活塞響應的建立時間為0.02 s,超調量為5%,調整時間為0.063 s,穩態誤差為0.203 μm。負載響應的建立時間為0.017 s,超調量為21%,調整時間為0.113 s,穩態誤差為55 μm。

圖7 階躍輸入響應曲線Fig.7 Step inputresponse curve
階躍響應曲線及各項指標表明,系統是穩定的,且響應迅速,動態過渡時間短,穩態誤差較小。活塞的響應曲線是二階振蕩環節和一階慣性環節的綜合,說明該系統以三階模型來表示將更加準確。活塞的動靜摩擦、搖臂的剛度、閥芯的摩擦力及閥芯工作邊的圓角大小都將影響活塞的穩態位移誤差,但由響應曲線可知,該值已經十分微小,可以不考慮。負載的穩態位移曲線略低于1 mm的輸入信號,是因為反饋取自活塞位移,由彈性負載引起的負載與活塞之間的相對位移未能進行校正。這一指標主要取決于助力器與舵面之間傳動機構的靜剛度,提高剛度可以減小位移誤差。
圖8所示為系統內部各變量的動態響應曲線。從圖8中可以直觀地觀察階躍響應時閥芯開度的最大值,以及動態變化過程,同時也可以查看負載流量、活塞速度和負載速度的動態過程,并進行必要的定性或定量分析。對部分參數進行調整后,流量和速度曲線都趨向于平滑,表明系統內部動態平穩,活塞和缸體的固有頻率并沒有影響系統動態的平穩性,仍然以負載的動態特性為主。

圖8 階躍輸入系統內部動態曲線Fig.8 System internal dynamic curve under step input
液壓缸兩腔的壓力動態過程如圖9所示,兩腔的壓力值為對稱變化,且變化平穩,沒有出現高頻的振蕩現象。壓力波動的最大幅值為0.6 MPa(6bar),達到穩態的時間為0.07 s,穩態壓差與彈性負載力平衡。只有在系統輸出為0時,穩態壓差才為0。
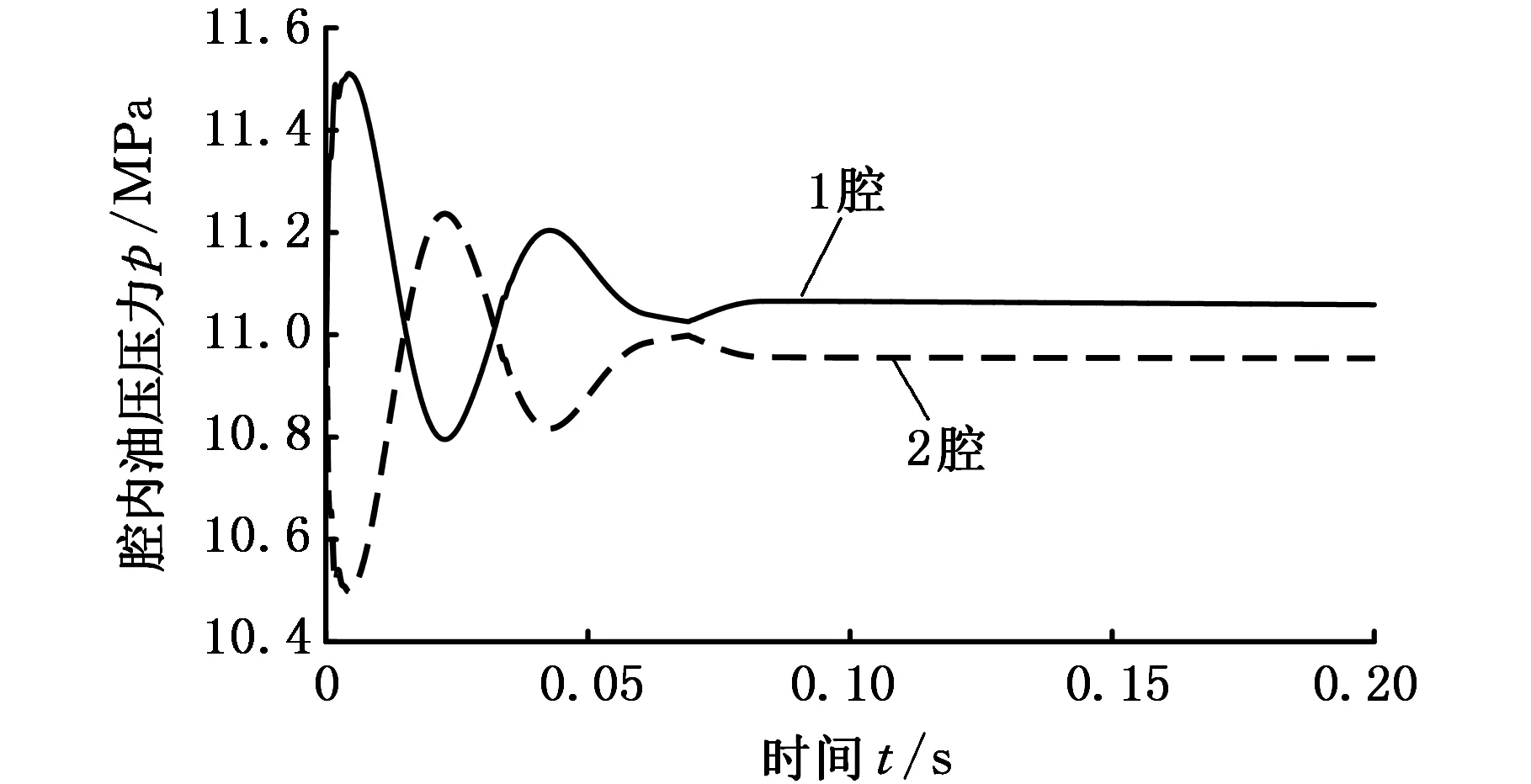
圖9 階躍輸入兩腔壓力動態曲線Fig.9 Two cavity dynamic pressure curve under step input
3.3 頻率響應與分析
對系統進行線性化分析,可以得到系統的頻率響應曲線。圖10為系統的開環伯德圖和閉環伯德圖。從開環伯德圖中可以看出,系統的幅值裕度為21.85 dB,大于6 dB,相位裕度為80.66°,大于45°,說明系統具有良好的穩定性。從閉環伯德圖可以看出,在輸入為1 Hz時,輸出相位滯后為5.69°,在工作頻段內具有很好的相位跟隨性。閉環截止頻率為11 Hz,遠大于最大工作頻率,系統工作帶寬滿足要求。

(a)開環伯德圖
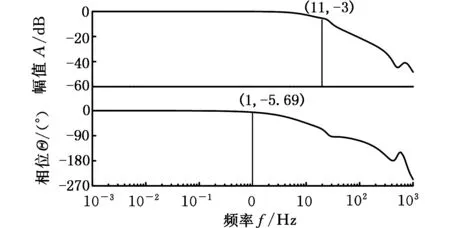
(b)閉環伯德圖圖10 系統伯德圖Fig.10 Bode diagram
系統的特征根為S1=-63.5,S2=-38.6±14.5j,S3=-1516.8±2072.5 j,S4=-1149.7±4436.8 j。可知所有的極點都位于虛軸的左側,S3和S4離虛軸較遠,對系統的影響較小。系統相應的過渡過程主要由閥控缸部分的閉環極點引起的暫態分量決定[12]。結合圖7階躍響應曲線可知,系統的響應速度快,存在振蕩,有些超調。S1離S2相對較近,負實數極點對應的暫態分量將對過渡過程有一定的影響,這與階躍響應曲線反應出的結果基本一致。
4 結論
(1)系統的穩定性對關鍵參數的設計十分敏感,滑閥面積梯度W大,則開環增益大,響應迅速,跟隨誤差小,但系統穩定性差,反之則結果正好相反。反饋比KfR體現了系統快速性和穩定性的矛盾,增大反饋比能使系統反應敏捷,而穩定性和動態品質將變差。各處結構阻尼對保證系統穩定具有重要作用,然而無法精確確定,是仿真分析需要重點關注的參數。
(2)通過增加搖臂剛度Kr,提出閥芯實時誤差(e-xv)這一概念,將系統閉環由位置反饋轉變為力反饋,從而建立閥芯的動態模型,考察閥芯動態對系統性能的影響,同時也為進一步的研究提供了新的思路。
(3)分別建立活塞及活塞桿組件和缸體的動態模型,獨立分析活塞及活塞桿組件和缸體響應特性,以及其對負載(舵面)響應的影響。
(4)仿真結果表明仿真模型能夠準確地對系統的動態特性進行預測,階躍響應與頻響曲線都表明系統是穩定的,從系統內部變量的動態過程可以看出,系統具有良好的動態過渡特性。
[1] 王永熙.飛機飛行控制液壓伺服作動器[M].北京:航空工業出版社,2014:1-2. WANG Yongxi. Aircraft Flight Control Hydraulic Servo Actuator[M]. Beijing: Aviation Industry Press,2014:1-2.
[2] 郭輝,王平軍,郭濤.基于Simulink的飛機液壓助力器建模與仿真研究[J].機床與液壓,2007,35(9):222-223. GUO Hui,WANG Pingjun,GUO Tao. Modeling and Simulation for Hydraulic Booster Based on Simulink[J].Machine Tool & Hydraulics,2007,35(9):222-223.
[3] 王春行.液壓伺服控制系統[M].北京:機械工業出版社,1989:96-97. WANG Chunxing. Hydraulic Servo Control System[M]. Beijing: Mechanical Industry Press,1989:96-97.
[4] 郭軍,吳亞峰,儲妮晟.AMESim仿真技術在飛機液壓系統中的應用[J].計算機輔助工程,2006,5(2):42-45. GUO Jun,WU Yafeng,CHU Nisheng. Application of AMESim in Aircraft Hydraulic System[J].Computer Aided Engineering,2006,15(2):42-45.
[5] 胡均平,劉成沛,郭勇,等.液壓打樁錘主控滑閥穩態液動力研究[J].合肥工業大學學報(自然科學版),2011,34(12):1787-1791. HU Junping,LIU Chengpei,GUO Yong,et al. Study of Steady-state Flow Force of Main Control Spool Valve of Hydraulic Pile Driving Hammer[J].Journal of Hefei University of Technology(Natural Science),2011,34(12):1787-1791.
[6] 周華剛,曹春泉,余慧玲.飛機液壓助力器模型分析[J].機床與液壓,2014,42(7):137-140. ZHOU Huagang,CAO Chunquan,YU Huiling. Analysis of Hydraulic Booster Model for Aircraft[J].Machine Tool & Hydraulics,2014,42(7):137-140.
[7] 陳宇金,李磊,萬興云.基于AMESim的直升機液壓助力器建模與分析[J].直升機技術,2012(4):45-51. CHEN Yujing,LI Lei,WAN Xingyun. Modeling and Simulation of Helicopter Hydraulic Actuater Based on AMESim[J].Helicopter Technique,2012(4):45-51.
[8] 董振樂,馬大為,姚建勇,等. 含磁滯補償的電液伺服系統預設性能跟蹤控制[J]. 中國機械工程,2016,27(8):995-1000. DONG Zhenle,MA Dawei,YAO Jianyong, et al. Prescribed Performance Tracking Control of Electro-hydraulic Servo Systems with Hysteresis Compensation[J].China Mechanical Engineering,2016,27(8):995-1000.
[9] 王玄,陶建峰,張峰榕,等. 泵控非對稱液壓缸系統高精度位置控制方法[J].浙江大學學報(工學版),2016,50(4):597-602. WANG Xuan,TAO Jianfeng, ZHANG Fengrong, et al. Precision Position Control of Pump-controlled Asymmetric Cylinder[J]. Journal of Zhejinag University(Engineering Science),2016,50(4):597-602.
[10] 王建強,陳立群,夏永勝,等.非對稱閥控非對稱缸系統仿真與優化研究[J].合肥工業大學學報:自然科學版,2012,35(5):595-597. WANG Jianqiang,CHEN Liqun,XIA Yongsheng,et al. System Simulation and Optimization Research on Asy-mmetric Cylinder Controlled by Asymm-etric Valve[J].Journal of Hefei University of Technology:Natural Science,2012,35(5):595-597.
[11] 葉小華,岑豫皖,趙韓,等.基于液壓彈簧剛度的閥控非對稱缸建模仿真[J].中國機械工程,2011,22(1):23-27. YE Xiaohua,CEN Yuwan,ZHAO Han,et al. Modeling and Simulation of Hydraulic Spring Stiffness-based Asymmetrical Cylinder Controlled by Valve[J].China Mechanical Engineering,2011,22(1):23-27.
[12] 陳佳,邢繼峰,彭利坤. 基于傳遞函數的數字液壓缸建模與分析[J].中國機械工程,2014,25(1):65-70. CHEN Jia,XING Jifeng,PENG Likun. Modeling and Analysis of Digital Cylinder Based on Transfer Function[J]. China Mechanical Engineering,2014,25(1):65-70.
(編輯 袁興玲)
作者簡介:陳 劍,男,1962年生。合肥工業大學噪聲振動工程研究所教授、博士研究生導師。主要研究方向為汽車NVH與CAE、機器低噪聲設計、液壓系統振動與噪聲控制。發表論文50余篇。鄧支強,男,1991年生。合肥工業大學噪聲振動工程研究所碩士研究生。喬晉紅,男,1989年生。合肥工業大學噪聲振動工程研究所碩士研究生。
Aircraft Hydraulic Booster and Rudder System Modeling and Performance Simulation
CHEN Jian DENG Zhiqiang QIAO Jinhong
Institute of Sound and Vibration Research, Hefei University of Technology, Hefei,230009
A simulation model for analyzing a hydraulic booster and rudder system was established based on a typical hydraulic booster of a certain type of aircraft flight control system. The system model that consisted of the dynamics of load, piston, cylinder, and spool of the valve was derived by considering the influences of nonlinear factors such as oil stiffness, structure stiffness, friction and leakage. The influences of key parameters on the system performance and stability were analyzed and elaborated by focusing on the system stability and static dynamic characteristics. The simulation results show that this system has good stability and quick response, as well as good performance in both of static and dynamic.
hydraulic booster; flight control; stability; static and dynamic characteristics
文 靜,女,1992年生。上海大學機電工程及自動化學院碩士研究生。主要研究方向為機械設計。E-mail:1562851783@qq.com。何永義,男,1965年生。上海大學機電工程與自動化學院研究員、博士研究生導師。
2016-05-27
V249.11
10.3969/j.issn.1004-132X.2017.07.008
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19