顧及道路約束條件的動態目標檢測與跟蹤方法
2017-06-19 18:47:25焦金龍盧小平
測繪通報 2017年5期
焦金龍,盧小平
(河南理工大學礦山空間信息技術國家測繪地理信息局重點實驗室,河南 焦作 454003)
顧及道路約束條件的動態目標檢測與跟蹤方法
焦金龍,盧小平
(河南理工大學礦山空間信息技術國家測繪地理信息局重點實驗室,河南 焦作 454003)
智能交通是智慧城市的重要組成部分,面對復雜多變的道路背景,如何能夠快速檢測、跟蹤道路監控影像中的動態目標,是智能交通建設的關鍵技術難點。本文根據道路監控視頻特點,提出了采用道路約束條件與顏色特征集相結合的動態目標跟蹤方法,以道路約束條件確定運動目標搜索區域,利用HSV顏色特征集進行特征匹配,然后基于IIR濾波背景法對背景影像進行更新及動態目標的檢測,并根據道路約束條件與顏色特征相結合跟蹤方法實現對動態目標的跟蹤及動作預測。試驗結果表明該方法可準確對運動目標進行檢測與跟蹤,且對慢速運動目標也具有較好的響應能力,實現了對道路動態目標的實時檢測與跟蹤。
道路約束條件;HSV顏色空間;IIR濾波
隨著智慧城市建設工作的全面展開,智慧交通作為智慧城市的重要組成部分受到廣泛關注。智慧交通旨在解決道路交通現有的諸多問題,通過采用人工智能分析的方式對交通事故、道路附屬設施等進行有效檢測和快速處理,達到保護公民生命和財產安全的目的。近年來,隨著交通路況視頻監控網絡的大面積布設,動態目標跟蹤及監測作為交通管理的重要環節受到廣泛關注。因此,如何將計算機視覺和視頻監控技術有效結合,在盡可能少或完全脫離人為干預的條件下,通過對所監控影像序列的逐層分步計算與分析,達到對場景中蘊含的高層次語義信息的感知、分析與理解,從而實現智能監控是當前研究的熱點。
目前,動態目標檢測根據鏡頭狀態主要分為兩類:動態場景下的目標檢測和靜態場景下的目標檢測。動態場景即前景和背景均處于運動狀態,常用算法有基于特征的目標檢測[1-3]及基于相位相關的檢測算法[4];而靜態場景中由于背景處于靜止狀態,常采用幀間差分法[5]、光流法[6]及背景差分法[7-8]等進行目標檢測。背景差分法檢測運動目標速度快、檢測準確且易于實現,是目前動態目標檢測最常用的算法,但由于實際情況中場景的復雜性、不可預知性及各種環境干擾和噪聲的存在(如光照的突然變化、實際背景圖像中有些物體的波動、攝像機的抖動、運動物體進出場景對原場景的影響等),使得背景的建模和模擬變得比較困難。針對上述難點,國內外學者嘗試建立自適應背景模型實現對背景的更新,以解決背景差分法應用的局限問題[9-13]。
本文提出通過彩色空間轉換到HSV空間,根據HSV顏色空間色調和亮度分離特性,采用色調分量作為待處理數據,利用IIR(infinite impulse response digital filter)濾波法對背景模型進行自適應更新,完成對動態目標的檢測,并采用道路約束條件和HSV特征相結合的方法對運動目標進行搜索、匹配及預測,從而實現動態目標的實時跟蹤。
1 動態目標實時跟蹤
1.1 HSV彩色空間變換
在RGB顏色空間上,彩色圖像的3個分量不僅代表色彩和亮度,而且還存在著很大的相關性,即光線的變化會直接引起R、G、B這3個分量同時變化,對圖像的處理結果影響較大。
HSV(hue、saturation、value)是根據顏色的直觀特性創建的一種顏色空間,即六角錐體模型,是一種非線性顏色表示系統。顏色的表征參數是色調(H)、飽和度(S)、亮度(V),其中亮度分量V和色調分量(H、S)相互獨立,與圖像的彩色信息無關。如果僅考慮H、S兩個分量,則在一定程度上會抑制光照變化產生的影響。RGB彩色空間到HSV彩色空間的轉換公式[14]如下
V=max(R,G,B)
(1)
(2)
(3)
1.2 自適應背景差分法
1.2.1 單一模型背景差分法
背景差分法又稱背景減除法,通過對圖像進行統計建模獲取一個經驗背景模型,然后將當前圖像與背景圖像進行差分,根據它們之間的差異提取出目標,從而實現運動目標的檢測,其數學表達式[15]如下
(4)
(5)
式中,Di(x,y)為背景差值后的影像;Ii(x,y)為第i幀影像;B(x,y)為背景影像;T為閾值;Mi(x,y)為二值化影像。
該算法具體步驟為:
(1) 設定閾值T,將前景圖像與背景圖像進行相減得到差值D。
(2) 對比T與D,如果D>T,就判定此像素點是運動目標上的點;反之,則認定不是運動目標上的點。
此外,檢測算法的靈敏度取決于閾值的大小,實際檢測動態目標時,背景通常存在各種干擾,且隨著時間變化背景也會隨之改變,因此難以建立適用于整個圖像序列的理想背景模型,這也是該方法的不足之處。
1.2.2IIR濾波背景建模
IIR濾波器是一種結構簡單、可人為調控獲取最佳背景模型的建模方法,比基于統計的建模方法應用更加普遍。
IIR濾波器以第一幀影像作為背景影像,與下一幀影像進行加權分配獲取新的背景影像,并以此進行迭代,直至所有幀影像處理完畢。背景更新的數學模型[16]如下
(6)
獲得背景差分影像后對影像進行二值化處理,并對影像進行邊緣檢測,將邊緣長度小于100的視為噪聲區域進行過濾,從而檢測出動態目標。
1.3 道路約束下的動態目標跟蹤
動態目標跟蹤就是將檢測出的圖像序列與前景目標間建立聯系,從而確定運動目標的軌跡,即以圖像序列中的目標檢測為基礎提取目標的物理特征,并據此對目標進行匹配,將圖像序列連續幀中的運動目標進行關聯,從而實現在圖像序列中對該運動目標的連續跟蹤。
1.3.1 道路約束條件
目標在道路上的運動由于受到道路安全規定的制約,其運動軌跡具有一定的規律性。因此,可將道路的雙向道劃分為A1、A2兩個集合,并對A1和A2定義行駛方向;然后根據運動目標的形心位置對其所屬集合進行判定,將該集合的行駛方向作為目標跟蹤的初始搜索方向,這樣可在一定程度上減少待匹配的目標數量,尤其是在運動目標數量過多情況下,能夠快速實現運動目標的跟蹤。
1.3.2HSV顏色特征集
顏色特征對目標圖像的旋轉變化、尺度變化及少量局部遮擋等干擾因素具有良好的穩定性。目前常用的是顏色直方圖模型,它具有構造簡單、計算量小、易于疊加等優點。計算顏色直方圖需要將顏色空間進行劃分,形成多個直方圖簇。通過統計圖像或圖像區域中顏色落入相應簇中的像素數量,實現對顏色直方圖特征的提取。
本文采用道路約束條件與顏色特征集相結合的跟蹤方法,以道路約束條件確定運動目標搜索區域,通過HSV顏色特征集進行特征匹配,同時對匹配成功的運動目標對的形心位置進行差值運算,獲取其運動矢量,實現對運動目標的預測。
2 試驗與結果評價
2.1 試驗驗證
試驗采用道路交叉口的監控視頻數據。道路作為動態目標的載體,選擇道路覆蓋區域內的目標進行檢測,不僅可以有效減少動態目標的搜索區域,還可以消除非道路下的噪聲區域,提高動態目標檢測的準確性。由于視頻場景中鏡頭、道路及附屬設施均處于靜止狀態(即在影像中的覆蓋區域位置保持不變),因此可以直接對道路覆蓋區域建立掩膜文件,對視頻區域內動態目標快速提取。圖1為采用掩膜方法提取的結果。
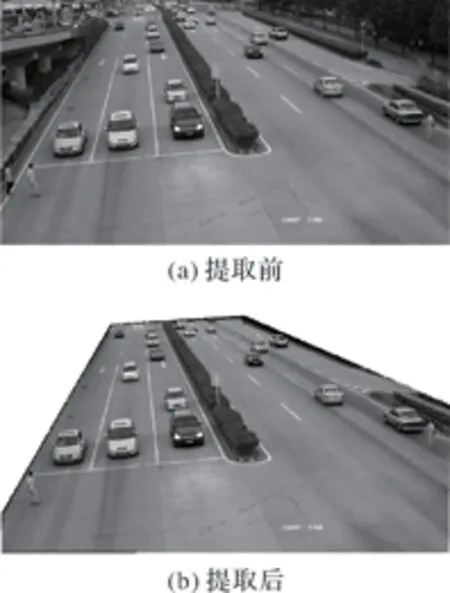
圖1 有效區域提取結果
2.2 道路目標的檢測與跟蹤結果分析
為驗證本方法的有效性,本文從目標檢測及車輛跟蹤兩個方面進行對比分析。分析結果如下:
(1) 在獲取差分影像后,通過對其進行濾波及數學形態的閉運算后,生成一個只含有運動目標信息的影像。圖2(a)、(b)分別為第1幀影像和第10幀影像,從中可以看出人行道上有兩個行人,圖中左邊的白色車輛處于慢速運動,而右邊的車輛保持靜止。從圖2(c)可以看出,圖像中處于運動的行人及慢速運動的車輛均被檢測到,其他區域全部默認為背景影像,動態目標檢測效果理想。

圖2 動態目標檢測結果
(2) 為驗證跟蹤方法的有效性,本文選取運動目標數量較多的區域進行驗證(如圖3所示)。圖3為從第1幀影像開始每隔5幀影像的跟蹤結果,其中不同的灰度框表示不同的運動目標,從中可以看出本文跟蹤方法能夠準確地對運動目標進行跟蹤且未出現目標丟失或目標跟蹤錯誤等現象,可靠性較高。
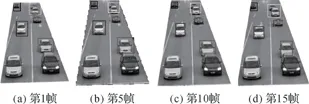
圖3 動態目標跟蹤結果
3 結 語
本文通過HSV顏色特征、IIR濾波背景模型及帶有道路約束的目標跟蹤法三者相結合的方法,對道路目標進行檢測跟蹤,實例驗證表明了本文所提方法在滿足實時性的前提下,能夠快速準確地對道路運動目標進行檢測與跟蹤。
[1] 譚熊, 余旭初, 劉景正,等. 基于無人機視頻的運動目標快速跟蹤[J].測繪通報, 2011(9):32-34.
[2] 王文龍, 李清泉. 基于蒙特卡羅算法的車輛跟蹤方法[J]. 測繪學報, 2011, 40(2):200-203.
[3] 陳巖, 劉開華. 動態背景下運動目標的檢測與跟蹤[J]. 通信技術, 2003(12):104-106.
[4] 趙高鵬, 薄煜明, 陳益. 一種基于特征匹配的目標識別跟蹤方法[J]. 火炮發射與控制學報, 2009(1):30-34.
[5] 屠禮芬, 仲思東, 彭祺,等. 基于混合差分法的運動目標檢測[J]. 科學技術與工程, 2012, 12(2):325-329.
[6] 吳垠, 李良福, 肖樟樹,等. 基于尺度不變特征的光流法目標跟蹤技術研究[J]. 計算機工程與應用, 2013, 49(15):157-161.
[7] 譚艷, 王宇俊. 一種結合背景差分的改進CamShift目標跟蹤方法[J]. 西南師范大學學報(自然科學版), 2016, 41(9):120-125.
[8] 龔鼎, 曹廣忠. 一種基于背景差分算法的實時運動檢測跟蹤系統的設計[J]. 電腦知識與技術(學術交流), 2016, 12(8):207-209.
[9] KIM K,CHALIDABHONGSE T H,HARWOOD D, et al. Real-time Foreground-background Segmentation Using Codebook Model[J]. Real-time Imaging, 2005, 11(3):172-185.
[10] STAUFFER C, GRIMSON W E L. Adaptive Background Mixture Models for Real-time Tracking[C]∥cvpr. IEEE Computer Society. [S.l.]:IEEE 1999.
[11] STAUFFER C, GRIMSON W E L. Learning Patterns of Activity Using Real-time Tracking[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2000, 22(8):747-757.
[12] 韓明, 劉教民, 孟軍英,等. 一種自適應調整K-ρ的混合高斯背景建模和目標檢測算法[J]. 電子與信息學報, 2014, 36(8):2023-2027.
[13] 黃玉, 殷萇茗, 周書仁. 基于YCbCr的自適應混合高斯模型背景建模[J]. 計算機工程與科學, 2015, 37(1):152-156.
[14] 范五東, 周尚波, 辛培宸. HSV顏色空間特征與Kalman濾波融合的目標跟蹤[J]. 計算機工程與應用, 2011, 47(13):169-173.
[15] 楊宇騰. 基于背景差分法與虛擬區域融合的視頻中車流量統計的方法[D]. 昆明:云南大學, 2015.
[16] 余紹軍, 蔣钘, 蔣鑫暉. 一種基于灰度相關性的背景更新算法[J]. 電子世界, 2013(3):58-60.
A Method of Dynamic Target Detection and Tracking Based on Road Constraint Condition
JIAO Jinlong,LU Xiaoping
(Key Laboratory of Mine Spatial Information and Technology of NASMG, Jiaozuo 454003, China)
As an important part of intelligent city, intelligent transportation is an important guarantee for urban road safety. The difficulty is how to quickly detect and track dynamic targets in road monitoring images with the complex and changeable road background. According to the characteristics of road monitoring video, a dynamic target tracking method is proposed based on the combination of road constraints and color feature sets. Firstly, the moving target search region is determined by road constraints, and HSV color feature set is used for feature matching. Then the background image is updated and the dynamic target is detected based on IIR filtering background method. Finally, tracking and motion forecasting of dynamic objects are realized based on the tracking method which combines the road constraints and color features. The experimental results show that the method can detect and track the moving target accurately. It also has good response ability to the small displacement target and realizes the real-time detection and tracking of the road dynamic target.
road constraint condition;HSV color space;infinite impulse response digital filter
焦金龍,盧小平.顧及道路約束條件的動態目標檢測與跟蹤方法[J].測繪通報,2017(5):47-50.
10.13474/j.cnki.11-2246.2017.0152.
2016-12-26;
2017-03-08
2016年度國家重點研發計劃項目(2016YFC0803103);河南省高校創新團隊支持計劃項目(14IRTSTHN026);河南省創新型科技創新團隊支持計劃
焦金龍(1991—),男,碩士生,研究方向為攝影測量與遙感。E-mail:jjinlong91@163.com
盧小平
P23
A
0494-0911(2017)05-0047-04
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12