分體式電纜隧道檢測機器人的移動結構研究
2017-06-23 13:27:14楊華夏
自動化儀表 2017年6期
馮 凌,楊華夏,魏 東
(國網重慶市電力公司電力科學研究院,重慶 401123)
分體式電纜隧道檢測機器人的移動結構研究
馮 凌,楊華夏,魏 東
(國網重慶市電力公司電力科學研究院,重慶 401123)
隨著城市電纜隧道的不斷增加,為確保電纜隧道內環境檢測和電纜的安全運行,對電纜隧道檢測機器人進行研究具有重要意義,而目前國內外對于電纜隧道檢測機器人的研究還處于初期發展階段。介紹了電纜隧道檢測機器人的現狀,為采集電纜隧道內部環境圖像、溫度、有毒氣體等信息,需要開發適應復雜環境的機器人移動結構。通過對電纜隧道環境類似的管道機器人移動結構現狀分析與綜合比較,將履帶、輪式、多節機器人移動結構作為設計的重點參考對象。通過進一步分析履帶、輪式、多節機器人移動結構的特點,提出了多節分體式機器人的研究思路,并設計了分體式機器人移動結構。通過機器人運動分析,驗證了該移動結構的優越性。基于分體式電纜隧道檢測機器人移動結構研究,為后續電纜隧道檢測機器人的研究提供了有益借鑒和參考。
機器人; 電纜隧道; 傳感器; 通信; 環境監測; 輸油管道; 管道檢測
0 引言
隨著經濟的發展,城市用電量不斷攀升,鋪設的輸電線路也越來越多。市區外電纜敷設以架空輸電線路為主,而市區內則采用直埋、電纜隧道以及排管等方式[1]。為了合理規劃城市布局,保證人員和設施的安全,電纜隧道的敷設方式越來越受到重視。為實現電纜隧道內部環境的檢測和確保電纜的安全運行,研究電纜隧道檢測機器人具有積極意義。
電纜隧道是容納大量敷設在電纜支架上電纜的走廊或隧道式構筑物。由于隧道內部可能存在可燃性、有毒性氣體,會對人工作業造成危害;當隧道內電纜發生故障時,容易引起爆炸、火災等異常情況,會產生大量濃煙和有毒氣體,既腐蝕電氣設備,又對人體有害。此外,電纜隧道內因諸多原因引起的積水現象也給電纜的長時間運行帶來了極大的安全隱患[2]。
目前,電纜隧道的檢測主要采用人工方式[3],國內外仍缺乏對電纜隧道檢測機器人的有關研究。在分析現有少量的電纜隧道機器人和工作環境相近的管道機器人移動結構的基礎上,提出一種適合電纜隧道環境的機器人移動結構。
1 電纜隧道檢測機器人現狀分析
電纜隧道檢測機器人是管道檢測機器人的一種。由于檢測對象繁多,需要搭載多種傳感器設備。電纜隧道檢測機器人需要對隧道內部的工作環境進行圖像采集,對溫度和有毒有害氣體(如CO、CO2、CH4、SO2等)濃度進行檢測,并將采集到的實時信息傳送到地面處理中心[4]。
基于電纜隧道復雜的環境和種類繁多的檢測對象,電纜隧道檢測機器人需要采用獨特的機械結構設計。管道機器人移動結構分類如圖1所示,包括流體壓力式、輪式、爬行式、彈性桿式、腳式、蠕動式等[5]。本文主要針對比較接近電纜隧道的工作環境,對管道機器人移動結構進行分類和研究。

圖1 管道機器人移動結構分類圖
2 電纜隧道檢測機器人移動結構分析
由于國內外對電纜隧道檢測機器人的研究比較少,而且電纜隧道可以看作管道的一種特殊環境,因此可以參考現有管道機器人的設計方案,解決電纜隧道檢測機器人面臨的技術難題。按照管道機器人的工作環境進行分類,能夠更好地適應電纜隧道環境的特殊性;工作環境主要可分為輸油管道、燃氣管道、排水管道、空調風管、油煙管道等[6]。下面在分析各種管道機器人的基礎上探討解決方案。
2.1 管道檢測和維護機器人
2.1.1 輸油管道檢測和維護機器人
輸油管道可實現汽油、柴油、煤油等成品油的長距離輸送,目前正向大口徑、高壓力的大型管道發展。從20世紀50年代開始,為了實現長距離輸油管道運輸、自動檢測及維護,美、法、英、日等國著手研制管道檢測機器人。典型的成果是無動力管道檢測和維護設備[7],該設備外徑略大于管道直徑,將其壓入管道后,由設備首尾兩端管內流體形成的壓差提供動力,克服管壁與活塞間的摩擦力向前運動。
無動力管道檢測和維護設備是為特定管道設計的,行走距離遠且不必拖纜作業;但其無法大范圍變徑管道,且無自主行走能力,在管道內只能單向運動,不能適應管徑變化,運動速度不易控制,所以并不適合電纜隧道的設計要求。
2.1.2 燃氣管道檢測和維護機器人
燃氣管道可將煤氣、天然氣等燃氣輸送給工業企業、公共建筑和居民用戶使用。燃氣管機器人誕生于20世紀40年代,到20世紀90年代取得較快發展。為了適應不同直徑管道的檢測,燃氣管道機器人需具備管徑適應調整機構,主要包括兩個方面[8]:在不同直徑的管道中能張開或收縮,改變機器人的外徑尺寸,使機器人能在各種直徑的管道中行走作業;可以提供附加正壓力,增加機器人的驅動輪與管道內壁間的壓力,改善機器人的牽引性能,增加管內移動檢測距離。
燃氣管道機器人的移動結構主要采用多節方式或者磁性內外輪方式,能有效通過T型或90°彎管,行動方便;但對管壁材料有依賴性或對管道半徑有局限。其中多節結構的優異性可以為電纜隧道檢測機器人提供參考。
2.1.3 排水管道檢測和維護機器人
排水管道是匯集和排放污水、廢水和雨水的管渠。20世紀80年代,歐美國家已經研制出具有實用價值的排水管道機器人。排水管道機器人以輪式為主[9],可以在有淤泥和大量積水的環境下工作,能夠在管道內自由行走,可為電纜隧道檢測機器人的移動結構提供有效參考。
2.2 管道清潔機器人
2.2.1 風管清潔機器人
風管是實現空氣輸送和分布的管道系統,可按截面形狀分為圓形風管、矩形風管、扁圓風管等。20世紀90 年代末才誕生了風管清掃移動機器人,其中代表性的產品有:英國的 Indoor、瑞典的 Wintclean、韓國的Hanlin、加拿大的沙漠風暴等[10]。這些機器人的結構大同小異,移動機構基本采用輪式或雙履帶式,性能水平并沒太大差別。中國的履帶式風管管道機器人主要有上海億仕龍公司和東華大學的多履帶腿式風管機器人[11]。浙江大學研究的中央空調管道式通風系統清潔機器人能夠同時清掃兩個壁面[12]。
風管機器人主要采用輪式或者履帶式,能在風管中自由移動,可作為電纜隧道檢測機器人的有效參考。
2.2.2 油煙管道清潔機器人
油煙管道可實現對油煙的排放。油煙管道清洗機器人是專門針對酒店、賓館、學校、企事業單位等的油煙管道專用清洗機器人。機械裝置主要由爬行裝置和噴桿運動機構組成,其工作原理為:機器人由爬行裝置實現管道內部的運動作業,噴桿運動機構以爬行機構為搭載平臺,裝載高壓流噴桿來實現管道內部的全面清洗。油煙管道機器人主要采用螺旋式或者履帶式結構。螺旋管道機器人采用螺旋運動方式,能夠更好地適應油煙管道環境。中國武漢亞伯蘭機電有限公司生產的煙道機器人的質量為18 kg,最大爬坡能力為30%,采用高壓射流清洗,電源220 V,功率60 W[13]。大連工業大學也提出了類似的煙道機器人[13]。
螺旋式油煙管道機器人對管道半徑有依賴,履帶式油煙管道機器人可以更自由地行走,可作為電纜隧道檢測機器人的有效參考。
2.2.3 排水管道清淤機器人
排水管道的清潔主要采用高壓水射流技術,并結合傳統管道清洗技術,主要應用于市政燃氣、給排水工程、油田、礦業、電力、造紙、化工、建筑等行業。
2000年,德國圣奧古斯汀的Fraunhofer自動化智能系統研究所成功研制了世界上第一個鏈式污水管道機器人——MAKRO管道機器人[14]。它采用分段蠕蟲狀外形設計,具備了前所未有的靈活性,適用于大直徑、淤積不嚴重、管路復雜的排水管道。2002年,美國佛羅里達大學電子及計算機工程學院智能機械設計實驗室研制了OH’S管道清理機器人[15],該機器人由頭部、驅動、穩定性控制三個部分組成。清華大學研制的下水自動清淤機器人[16]適用于直徑為400 mm的管道,載體采用了輪式行走機構、四輪驅動方式,以三相異步電機作原動機。哈爾濱工程大學的城市排水管道穿纜檢測機器人[17]采用了履帶式行走機構,可檢測、疏通直徑大于500 mm的城市排水管道。
排水管道清潔機器人主要采用輪式和履帶式結構,能夠在管道內有效行走,可為電纜隧道檢測機器人設計提供參考。
3 管道機器人移動結構分析和選擇
通過對以上重要管道環境和管道機器人進行分析,可發現電纜隧道環境相對復雜,對機器人移動結構要求很高,目前僅有少數科研機構對電纜隧道檢測機器人進行了直接研究。表1是對各種機器人移動結構的綜合比較,其中排水管道、風管和油煙管道等的環境比較接近電纜隧道,機器人移動結構設計以輪式、履帶式和多節結構為主。在石油管道或者燃氣管道等環境中,機器人對管壁的依賴比較高,主要采取固定管徑或者變徑結構方式。在燃氣管道中采用多節移動結構,可以更加方便地通過T型或90°彎管。

表1 各種移動結構的綜合比較
從表1分析可知,履帶、輪式、多節結構是較為可行的移動結構,可作為電纜隧道機器人移動結構的參考,下面對這三類移動結構作進一步分析。
3.1 履帶式移動結構
履帶式移動結構能夠在油污、泥濘、障礙等惡劣條件下達到良好的行走狀態。履帶與管底部的接觸面積大,附著力也大,具有優越的越障性能,適用于復雜的管道內環境。履帶式結構機器人靠履帶卷繞時管道底部對履帶產生的反作用力,推動機器人在管道內運動。其中起主要作用的是機器人履帶的驅動段和接地段,通過驅動段產生拉力(相對機器人而言是內力),將接地段從重輪下拉出,與管道底部產生反作用力(外力),提供較強的驅動能力。
履帶結構復雜,不易小型化,轉向性能不如輪式移動結構。當障礙物的高度超過履帶輪直徑一定程度時,無法實現有效跨越。只有克服以上缺點,履帶式移動結構才能在電纜隧道中應用。
3.2 輪式移動結構
輪式管道機器人以其結構簡單、運動平穩、速度快、行走效率高、易于小型化和控制容易等優點,在風管和排水管道等管道環境中大量使用。輪式移動結構可以分為支撐輪式和車型式兩種,在管道中各有優缺點。
支撐輪式在結構上采用對稱的形式,機器人通過沿管道軸向等間隔分布多組行走機構,支撐在管道內壁上,能在管內自定心行走。隨著管道直徑發生變化或者機器人在管道內部調整姿勢,機器人的中心軸線需要與管道中心軸線保持一致;由于對稱支撐的作用,會產生較大的封閉力和很強的牽引力,使機器人可以在垂直管道內行走。但由于對管道直徑和管壁過于依賴,支撐輪式不太適合電纜隧道環境。
車型式移動結構較簡單,體積較小,在管道內運動靈活,可以在電纜隧道內有效運行。但是其牽引力較小,爬坡能力有限,不能直接進入垂直圓管內。機器人在圓管內的運動穩定性只存在于較小的旋轉姿態范圍內,需要產生附加封閉力的裝置。在電纜隧道底部,運行環境相對平坦和寬敞,可以克服無外加封閉力的缺點,在增強牽引力的基礎上可以較好地進行轉彎和爬坡動作。
在設計電纜隧道機器人移動結構時,可以考慮支撐輪的優點,提供有效的牽引力和爬坡支撐力。
3.3 多節移動結構
多節移動結構機器人的節與節之間通過可控萬向絞鏈連接,其支持方式采用彈簧支持式連桿結構,可以適應一定的管徑范圍。多節中前后各有一個驅動節或轉向節,中間為工作節,用于搭載各種傳感器進行作業,前進和后退方向都具有主動轉向能力,從而實現越過障礙物或者拐彎運動,并通過各種彎管接頭。
為了使機器人能夠在管道內靈活地進行彎道轉彎運動,將機器人的多種功能分散到相互聯接的單元體上,每一單元體中都安裝有各種元器件,如驅動單元、檢測控制單元、電池單元、管道清理單元等;單元體上、下各有一個滑動輪,下方的滑輪是固定在單元體上起支撐作用的,上方的滑輪可上下伸縮,以確保在管道內有污垢時機器人能夠順利通過;各段之間采用可自由分合的連接方式,當機器人某段單元體卡在管道中時,其他單元體可以與其斷開,執行其他操作。
對于電纜隧道這樣復雜的環境,需要檢測的目標比較多,搭載的傳感器數量也很多。采用多節的方式不僅可以搭載足夠的傳感器,而且可以有效地在電纜隧道中運行,這種設計思路值得借鑒。
4 電纜隧道檢測機器人移動結構
4.1 機器人移動結構設計
為了使機器人有效地在電纜隧道環境中運行,可以結合履帶、輪式、多節結構的優點,設計出三節移動結構的機器人。采用對稱設計,每一節的底座使用履帶,前后兩節中采用前導驅動輪作為支撐輪,以搭載足夠的傳感器;利用支撐輪和擺臂的作用,進行有效的避障;利用履帶的優點,實現良好的行走;可以在不掉頭的情況下,利用前后兩頭相同的設計,實現雙向行走。電纜隧道檢測機器人移動結構如圖2所示。
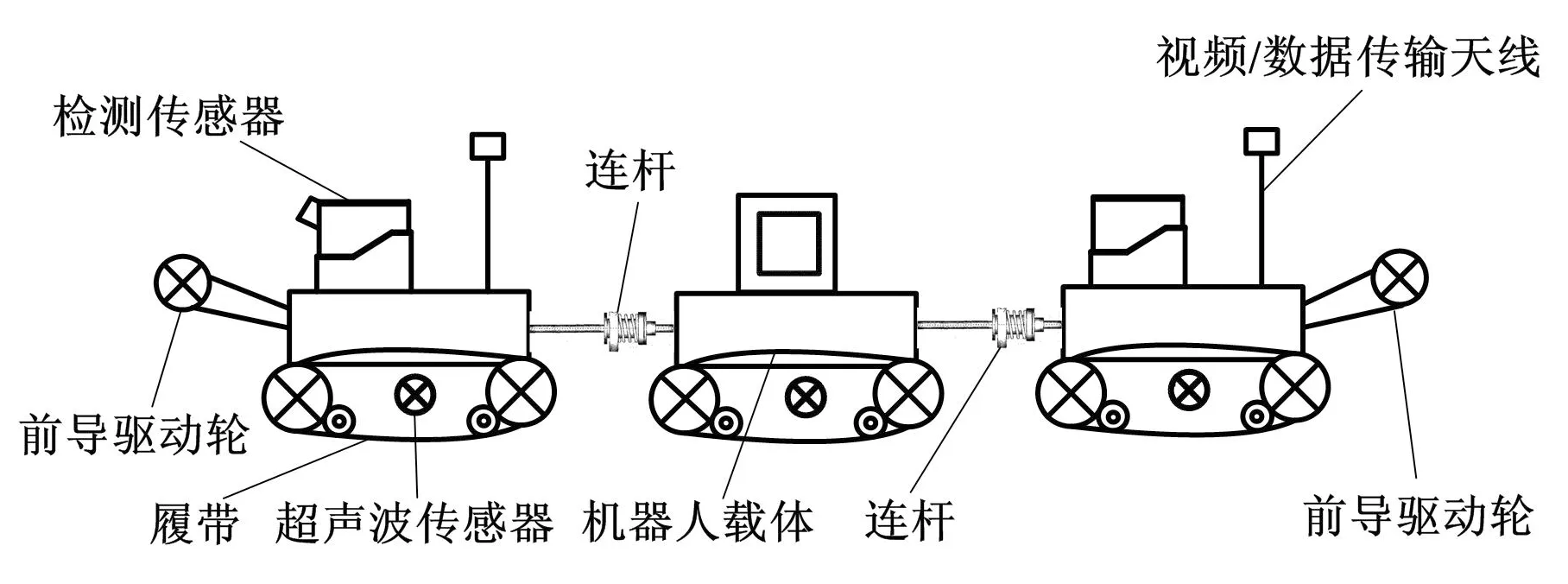
圖2 機器人移動結構圖
電纜隧道檢測機器人移動平臺設計為三節,前后兩節的移動結構是相同的,提供主要的驅動力,實現避障、轉彎、爬坡、主動轉向等功能。機器人搭載CCD云臺、紅外熱成像儀等成像傳感器,探知電纜隧道內部的環境,通過天線向地面控制中心無線傳輸圖像和數據信息;在機器人底部搭載超聲波傳感器,用于探測和避障; 中間的一節搭載溫度檢測傳感器、氣體檢測傳感器等,滿足電纜隧道環境檢測的需求。
電纜隧道檢測機器人移動結構采用對稱分布,移動平臺一共采用六臺電機。中間節為被動式運動,無需安裝電機驅動;前后兩節各配置三臺電機,其中一臺用于驅動前導驅動輪,通過控制擺臂電機將蝸桿減速機和擺臂相連,利用蝸桿傳動的自鎖性,來控制擺臂的角度,從而使機器人能更加方便地通過障礙物。其他兩臺電機各驅動一條履帶,通過控制履帶的差速運動實現機器人的轉向運動。
對稱分布結構是在每兩節之間采用可控平衡連桿連接,連桿由支持彈簧座、彈簧、滑塊等組成,各節之間還搭載通信線纜,可實現節與節之間的信息交互和控制。
4.2 機器人運動分析
機器人移動結構的運動分析主要包括跨越障礙物、爬坡、轉彎和避障等,從這些運動中可以看到本移動結構的優點,可適應復雜的電纜隧道環境,完成機器人檢測的任務。當機器人前方出現大的障礙物(如臺階、門檻等)且高度明顯超過機器人底座時,機器人通過調節前導驅動輪和擺臂位置,順利通過壁障,具體策略如圖3所示。
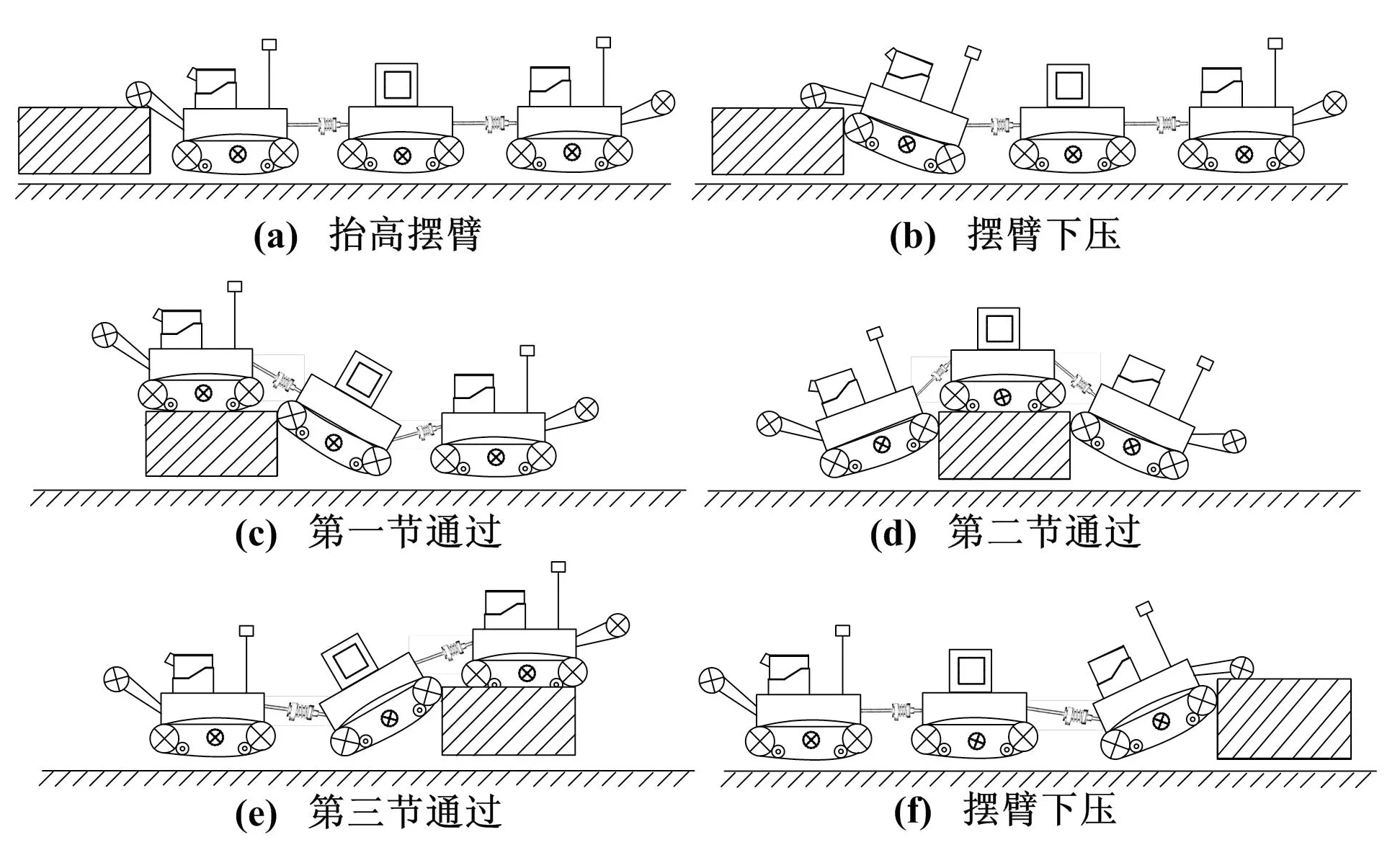
圖3 機器人跨越障礙物策略示意圖
當機器人遇到大角度的斜坡時,利用履帶驅動能力強的優點進行運動,其上、下坡策略如圖4所示。

圖4 機器人上、下坡策略示意圖
當機器人轉彎或者避障時,利用底座安裝的超聲波傳感器檢測電纜隧道內的情況,實施轉彎或避障策略,其運動軌跡如圖5所示。

圖5 機器人轉彎和避障策略示意圖
5 結束語
由于電纜隧道環境比一般的管道環境更加復雜、需要檢測的對象更多,因而對機器人移動結構的設計要求更高。本文在研究和分析了現有電纜隧道和相關管道機器人移動結構的基礎上,提出一種結合履帶、輪式、多節結構的機器人移動結構設計,可以搭載足夠數量的傳感器,并提供較強的驅動力,從而有效地進行轉彎和避障等行為,在電纜隧道中行走自如。今后還需重點解決避障、彎道通過性、供能和通信等問題,使之具有實際工程應用價值。
[1] 謝振宇.電纜隧道綜合檢測機器人控制系統研究[D].上海:上海交通大學,2008.
[2] 戚偉.電纜管道機器人視頻監測系統的開發[D].上海:上海交通大學,2008.
[3] 劉凱.電力隧道智能巡檢機器人系統的技術探討[J].城市建設理論研究,2014,4(35):78-79.
[4] 姜蕓,付莊.一種小型電纜隧道檢測機器人設計[J].華東電力,2009,37(1):95-97.
[5] 甘小明,徐濱士,董世運,等.管道機器人的發展現狀[J].機器人技術與應用,2003,32(6):45-49.
[6] 王永雄.管道機器人控制、導航和管道檢測技術研究[D].上海:上海交通大學,2012.
[7] 張濤.管道傳感器測漏方法綜述[J].中國儀器儀表,2006,23(10):25-27.
[8] 陳世彬.管道內表面自適應珩磨光整加工裝置的設計與研究[D].太原:太原理工大學,2016.
[9] 李成群,馬利平,路春光,等.牽引式排水管道清淤機器人的研究[J].制造業自動化,2014,36(11):57-60.
[10]謝振宇,付莊,宋國強,等.基于行為的電纜隧道綜合檢測機器人控制系統研究[J].機械與電子,2008,54(4):47-51.
[11]ISELEY T.Pipeline condition assessment:achieving uniform defect ratings [C]//Proceedings of Infra 99 International Conference,1999:121-132.
[12]劉瑩,申超.中央空調管道式通風系統清潔機器人[J].機械科學與技術,2011,30(3):435-439.
[13]胡亞南,馬書根,李斌,等.移動型模塊化機器人的高效重構規劃方法[J].機器人,2016,38(4):467-474,485.
[14]王殿君,李潤平,黃光明.管道機器人的研究進展[J].機床與液壓,2008,36(4):185-187.
[15]任新新,胡文韜,呂海翔,等.電纜管道巡檢清理機器人的研究與設計[J].電力電子技術,2016,34(2):21-24.
[16]許馮平,周延,趙志聰.蠕動式排水管道機器人研制[J].數控與自動化,2014,45(10):190-193.
[17]張天.仿生液壓四足機器人多傳感器檢測與信息融合技術研究[D].北京:北京理工大學,2015.
Research on the Moving Structure of Split Cable Tunnel Inspection Robot
FENG Ling,YANG Huaxia,WEI Dong
(Electric Power Research Institute,State Grid Chongqing Electric Power Company,Chongqing 401123,China)
With the increasing number of the urban cable tunnels,in order to ensure the safety operation of cables and environmental inspection inside tunnels,it is of great value and significance to study on replacing manual operation by the robots for cable tunnel detection.At present,the research on robots for cable tunnel detection at home and abroad is still in the initial stage of development.The current situation of the cable tunnel detection robots is introduced.For the collection of information about environmental image,temperature and toxic gas in the cable tunnel,it is necessary to develop the moving structure of robot,to adapt to the complex environment.Based on the analysis and comparison of the structure of the in-pipe robot,which is similar to the cable tunnel environment,the moving structures of track,wheel and multi-section robots are taken as the key reference object of the design.Based on the analysis of the characteristics of the moving structures of track,wheel and multi-section robots,the research idea of the multi-section split robot is proposed,and the moving structure of the split type robot is designed.The superiority of this moving structure is verified by the analysis of motion of robot.This provides useful reference for subsequent research on cable tunnel detection robots.
Robot; Cable tunnel; Sensor; Communication; Environmental monitoring; Oil pipeline; Pipeline inspection
馮凌(1981—),男,碩士,高級工程師,主要從事自動化與高壓電能計量技術的研究和推廣工作。E-mail:fenglingcq@sina.com。
TH-3;TP2
A
10.16086/j.cnki.issn1000-0380.201706011
修改稿收到日期:2017-01-09
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
