磁感應游離磨粒線鋸切割中磁系研究
2017-07-03 14:58:15姚春燕李賀杰李礦偉
浙江工業大學學報 2017年4期
關鍵詞:磁場
姚春燕,李賀杰,張 威,劉 坤,李礦偉,彭 偉
(浙江工業大學 特種裝備制造與先進加工技術教育部重點實驗室,浙江 杭州 310014)
磁感應游離磨粒線鋸切割中磁系研究
姚春燕,李賀杰,張 威,劉 坤,李礦偉,彭 偉
(浙江工業大學 特種裝備制造與先進加工技術教育部重點實驗室,浙江 杭州 310014)
根據磁感應游離磨粒線鋸切割技術要求,設計了能在鋸絲周圍產生輔助勻強磁場的磁系.利用ANSYS有限元軟件,分別建立了磁系的磁軛、磁極接頭的有限元仿真模型,仿真確定了磁軛的截面尺寸和磁極接頭形狀.根據磁軛、磁極接頭仿真結果并依據磁路設計原理組建磁系,對置于磁系中的鋸絲周圍的高梯度磁場特性進行了仿真研究,結果表明:所設計的磁系產生了勻強磁場并具有一定的聚磁效果;鋸絲在所設計的磁系中能夠形成高梯度磁場并按規律分布.搭建磨粒吸附觀測實驗平臺,觀測磁性磨粒在鋸絲表面的吸附,實驗結果表明:磁性磨粒吸附于鋸絲表面,所設計的磁系能夠產生良好的磨粒吸附效果.
線鋸切割;磁系;有限元仿真;高梯度磁場
游離磨粒線鋸切割技術通過鋸絲、磨粒和硅錠的三體磨粒磨損,磨粒作為第三體在鋸絲與工件兩體之間滾動,在鋸絲的切向運動作用下,向前滾動去除材料[1-3].目前,硅晶體切片主要采用游離磨粒線鋸切割技術[4-6].太陽能作為重要的綠色能源,近年來得到了巨大的發展,其應用范圍不斷擴大[7].硅片作為制作太陽能電池的重要材料,人們對于降低硅片切割成本、提高切割效率的要求越來越高[8-9].日本Watanabe等[10]研究發現:游離磨粒線鋸在切割大尺寸工件時,由于硅晶體尺寸大,切縫長度和切縫深度相應增加,線鋸切割過程中,磨粒難以進入到長而深的切縫,線鋸切割能力降低,同時由于切割時磨漿的分布不均勻,導致切片厚度不均勻.本研究依托國家自然科學基金項目磁感應游離磨粒線鋸切割新方法,通過在鋸絲外添加輔助勻強磁場,使磁性磨粒在磁場力的作用下更多的被鋸絲帶入到切割區域[11],從而改善切割性能.
產生勻強磁場的方式一般分為電磁和永磁兩種.在通過電磁的方式產生勻強磁場時,通常利用亥姆霍茲線圈[12]來提供較均勻的局部磁場.電磁場具有易于控制的優點,但相對于永磁體形成相同強度的磁場,電磁場具有體積大、能耗高和經濟性差等缺點.筆者所在團隊前期利用永磁體在鋸絲周圍產生輔助勻強磁場[13],但由于機床結構的限制和永磁體本身性能限制,依靠永磁體相對分布產生的磁場,難以提供足夠的磁場強度和較好的磁場均勻性.筆者針對單純依靠永磁體產生勻強磁場的不足,基于磁路設計原理[14],設計了利用永磁體與高導磁材料組成的磁系;通過有限元仿真,確定了磁系各部分結構,分析了置于所設計磁系中的鋸絲的高梯度磁場特性;通過磁性磨粒吸附實驗,驗證了所設計磁系能夠產生良好的吸附效果.
1 磁系建立及仿真
根據高梯度磁場產生原理[15],所設計磁系產生的磁場必須是勻強磁場并達到一定強度.根據切割機床實際結構要求和磁路設計原理,采用永磁體與高導磁材料組合成磁系.通過對永磁材料和高導磁材料分析,選用釹鐵硼永磁鐵作為磁系中的磁場發生源,DT4工業純鐵作為磁系中的高導磁材料來制作磁系中的磁軛與磁極接頭.
1.1 磁軛設計與仿真
在磁系中永磁鐵間通過磁軛組成磁系,需選取合適的磁軛截面與永磁鐵配合,以減少磁系中漏磁.根據選取永磁鐵的橫截面20 mm×20 mm,設計磁軛的橫截面分別為截面Ⅰ=10 mm×10 mm,截面Ⅱ=20 mm×20 mm,截面Ⅲ=30 mm×30 mm,使其與永磁鐵配合,如圖1所示.
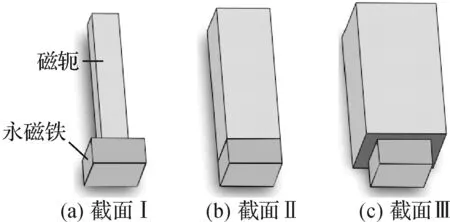
圖1 磁軛與永磁鐵配合圖Fig.1 Matching between Magnet yokes and permanent magnets
在ANSYS有限元軟件中對磁軛進行靜態二維磁場分析.空氣區域和永磁鐵選擇PLANE13單元,磁場邊界采用INFIN9二維遠場單元,則模型外邊界無需加邊界條件來說明磁場的遠場耗散問題;對于永磁鐵需要定義矯頑力、相對磁導率,其中矯頑力方向為充磁方向;對于磁軛需定義其相對磁導率.求解后分別在距磁軛頂部20 mm處和離磁軛頂部5 mm處取長為10 mm的路徑L1,L2,路徑位置選取以磁軛截面20 mm×20 mm為例,如圖2所示,測其在路徑上的磁感應強度分量Bx值.
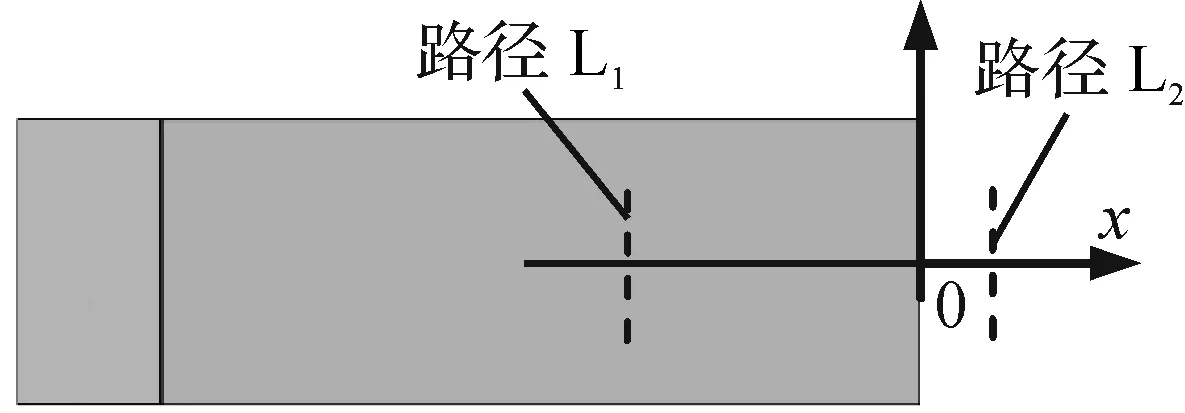
圖2 路徑位置選取圖Fig.2 The location of selected path
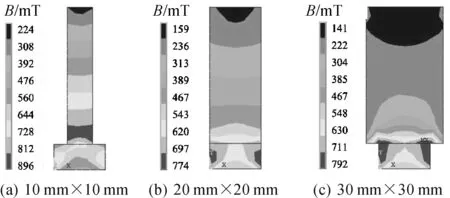
圖3 磁感應強度云圖Fig.3 Magnetic induction intensity contour
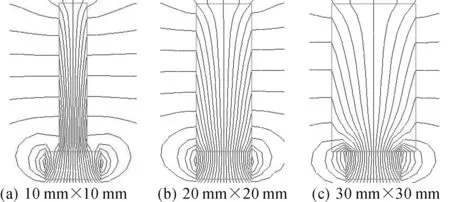
圖4 磁力線圖Fig.4 Magnetic lines

圖5 不同路徑上的Bx曲線圖Fig.5 Bx curves of different paths
由圖3和圖4可得:磁軛中的磁感應強度分布與磁軛橫截面尺寸有關.截面為10 mm×10 mm的磁軛中磁磁通最大,截面為30 mm×30 mm的磁軛中磁通最小;三種磁軛中的磁通均隨離永磁鐵距離的增加而減小.由圖4(a)中,一部分磁通從磁軛側面傳輸進入磁軛,導致靠近永磁鐵處的磁軛中磁通密度增加;相比于圖4(b),在圖4(c)中一部分磁通從磁軛中傳出,導致通過磁軛中的磁通密度降低.因此,當磁軛橫截面尺寸小于永磁鐵時,易使磁軛達到材料的飽和磁感應強度,降低磁軛磁導率;當磁軛橫截面尺寸大于永磁鐵的截面尺寸時,磁軛中的磁通有一部分從磁軛中流向永磁鐵,降低了磁軛中的磁通密度,導致漏磁增加.
從圖5中得出:10 mm×10 mm截面的磁軛測得磁感應強度分量Bx值,在兩個路徑中均大于其余兩種磁軛,因此最易達到材料飽和磁感應強度.3種磁軛從路徑L1到路徑L2,測得磁感應強度分量Bx值均降低,10 mm×10 mm截面的磁軛中磁感應強度分量Bx值降低最大,20 mm×20 mm截面磁軛中磁感應強度分量Bx值降低最小.因此選用橫截面為20 mm×20 mm的磁軛組合磁系.
1.2 磁極接頭的設計與仿真
磁極接頭是磁系的重要組成部分,勻強磁場在磁極接頭間產生.磁極接頭的設計不僅要考慮其導磁性能,還需考慮其對磁系所產生勻強磁場的影響.根據上述磁軛仿真結果、磁系氣隙與磁極接頭面寬度之比對磁系產生勻強磁場的影響、漏磁等因素,設計如圖6所示4種磁極接頭形狀并進行仿真分析.

圖6 磁極接頭形狀示意圖Fig.6 Shape of pole joint
仿真參數同磁軛仿真設置,求解后分別在距磁極接頭面5 mm處選取長20 mm的路徑L3,測其在路徑上的磁感應強度分量Bx值,路徑位置選取以直角矩形磁極接頭為例,如圖7所示.
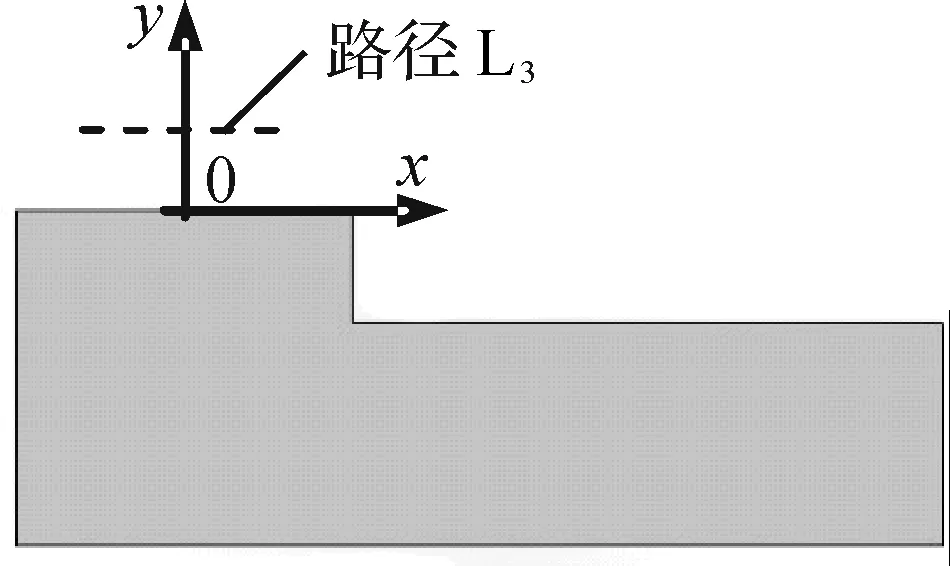
圖7 路徑位置選取圖Fig.7 The location of selected path
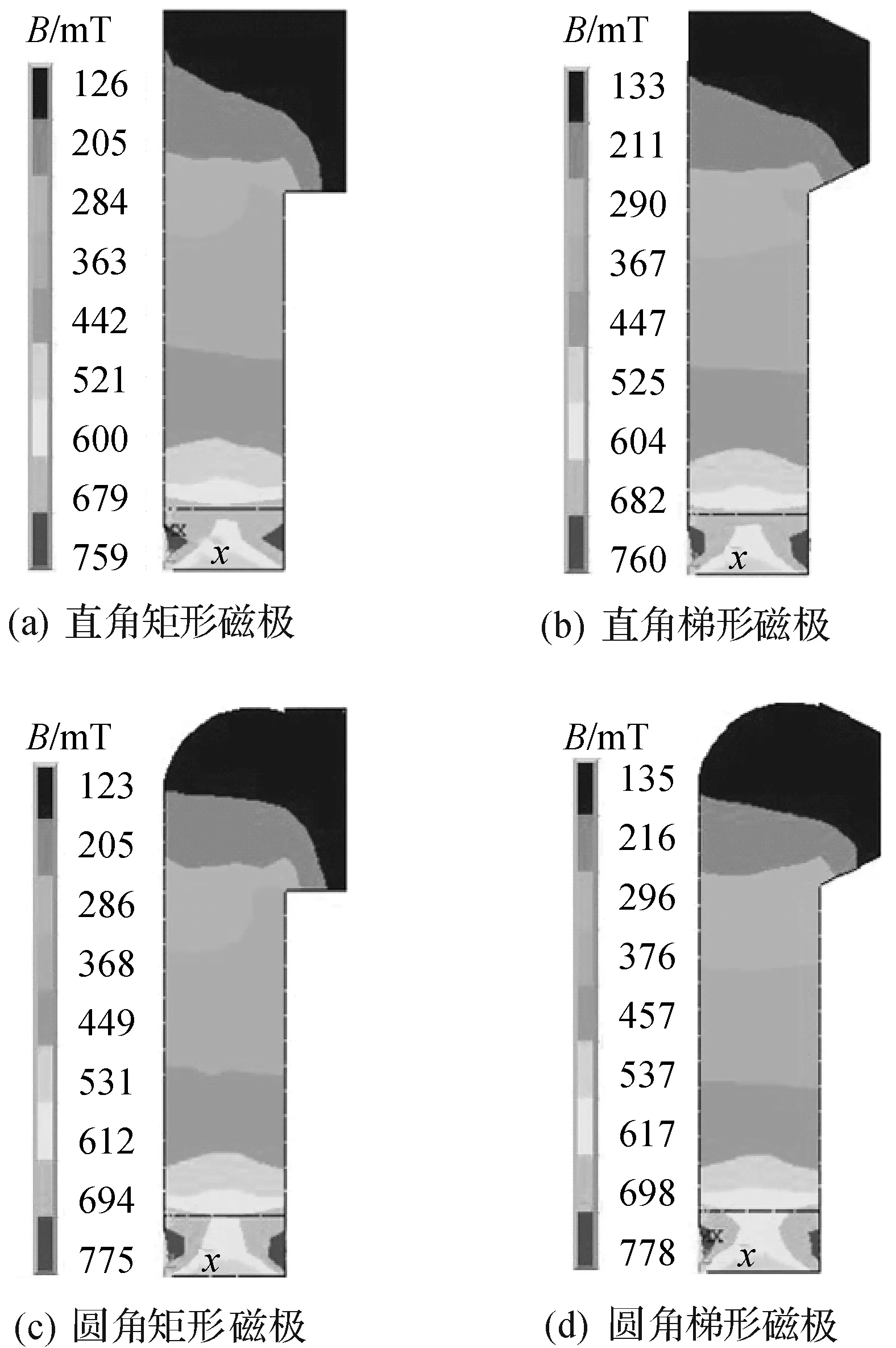
圖8 磁感應強度云圖Fig.8 Magnetic induction intensity contour
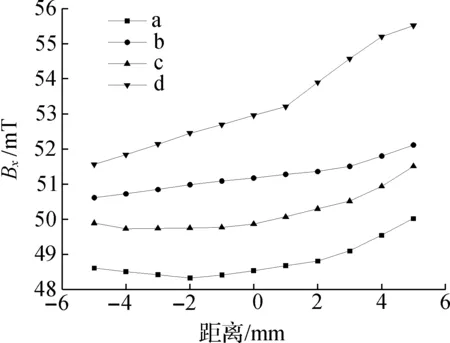
圖9 在路徑L3上的Bx曲線圖Fig.9 Bx curve of path L3
圖9中的a,b,c,d四條曲線分別對應表圖8中的四種磁極接頭.由圖8和圖9可得,圓角梯形磁極接頭在路徑L3上產生的磁感應強度分量值最大,直角梯形磁極接頭在路徑L3上產生的磁感應強度分量值僅低于圓角梯形磁極接頭;直角梯形磁極接頭測得的Bx曲線最為平緩,表明產生的勻強磁場均勻性最優,圓角梯形磁極接頭的Bx曲線平緩性最差.根據鋸絲高梯度磁場與外部勻強磁場的影響關系,因此選用直角梯形磁極接頭來組合磁系.
2 鋸絲周圍高梯度磁場的仿真分析
根據磁軛和磁極接頭有限元仿真分析、磁路設計原理、線鋸切割機床實際結構,設計如圖10所示磁系結構.磁系由6塊永磁鐵、3塊磁軛和兩塊磁極接頭組成.6塊永磁鐵分兩側放置,磁系一側3塊永磁鐵N極圍繞磁極接頭相對放置,另一側3塊永磁鐵S極圍繞磁極接頭相對放置,永磁鐵間通過磁軛和磁極接頭形成磁路.磁系的磁通從磁系左側永磁鐵的N極出發,經過磁軛、磁極接頭最后到達磁系右側的三塊永磁鐵中.這是一種聚磁磁路結構,它使永磁鐵產生的磁場疊加,在磁極接頭間產生了較強的磁場.
圖10 磁系結構圖Fig.10 Structure of magnetic system
對置于磁系中的鋸絲周圍高梯度磁場進行仿真分析,所用鋸絲直徑0.4 mm,相對磁導率11.4.仿真模型中有流體、鋸絲和磁系.對于流體區域,只需定義其相對磁導率,因空氣相對磁導率與流體的相對磁導率相差很小,故可用空氣的代替流體的,其值為1.為分析鋸絲形成的高梯度磁場,在鋸絲截面附近創建路徑A:(-4,-4)~(-4,4),B:(-4,4)~(4,4),C:(4,-4)~(4,4),D:(-4,-4)~(4,-4),如圖11所示.在ANSYS有限元軟件中通過后處理將磁感應強度分量Bx值映射到路徑A,B,C,D上.
圖11 鋸絲周圍路徑選取圖Fig.11 Paths selection around the wire
圖12 磁感應強度云圖Fig.12 Magnetic induction intensity contour
從圖12中得出鋸絲周圍形成了高梯度磁場,且鋸絲周圍的高梯度磁場把鋸絲分成了四個區域,四個區域的磁感應強度兩兩分布相似.由圖13磁系磁力線的分布得出磁系形成了勻強磁場,磁系有聚磁效果.由于鐵磁性鋸絲對磁力線有低的磁阻路程,當磁力線經過鋸絲時,向鋸絲彎曲收縮,鋸絲內部磁力線密度大于外部;磁力線在進入鋸絲時,因鋸絲的導磁率明顯大于外部流體的導磁率,幾乎與鋸絲表面垂直;在背景場強方向距鋸絲一定距離后,磁力線恢復原狀[16].
在圖14中的四組Bx曲線圖中A,B,C,D四條曲線分別對應圖11中的四條路徑,路徑A與路徑C上測得Bx曲線具有相似的曲線形狀,從路徑的的兩端向靠近鋸絲處磁感應強度逐漸增強;路徑B與路徑D上測得Bx曲線具有相似的曲線形狀,從路徑的兩端向靠近鋸絲處磁感應強度逐漸減弱;A,C路徑與B,D路徑測得Bx曲線形狀凸凹性相反.因此A,B,C,D四條路徑對應的鋸絲周圍四個區域中:A,C路徑對應的區域為順磁區;B,D路徑對應的區域為逆磁區.
圖13 磁力線圖Fig.13 Magnetic lines
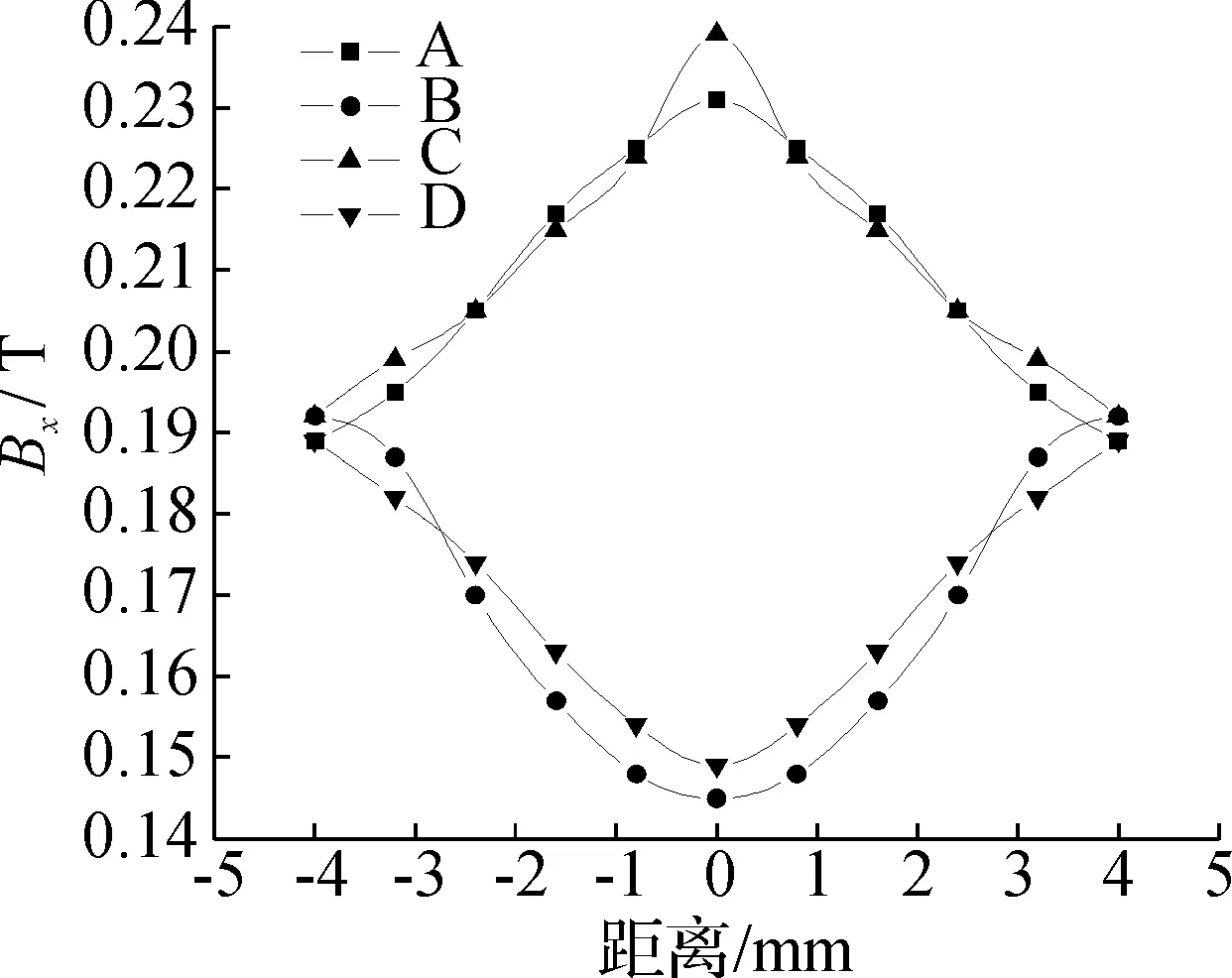
圖14 不同路徑上的Bx曲線圖Fig.14 Bx curves on different paths
3 磁性磨粒吸附實驗
采用釹鐵硼永磁鐵和DT4工業純鐵制成的磁軛、磁極接頭組裝磁系.搭建磨粒吸附觀測實驗平臺,使鋸絲置于磁系磁場中,通過VW-6000/5000動態分析三維顯微系統,觀測磁性磨粒在鋸絲表面的吸附情況,實驗平臺如圖15所示.
無外部勻強磁場時,鋸絲周圍基本無磨粒聚集,如圖16(a)所示.磨漿流向與磁場方向平行時,只在鋸絲朝向磨漿流向的一側有磨粒聚集如圖16(b)所示,可能是由于鋸絲梯度磁場的影響,這與Briss等[17]的研究結果一致;磨漿流向與磁場方向垂直時,在鋸絲與磁場方向平行的兩側既順磁區有磨粒聚集,而另外兩側(逆磁區)基本沒有磨粒聚集,如圖16(c)所示.在順磁區,磨粒受到吸力聚集在鋸絲兩側,在逆磁區磨粒受到斥力,因此基本無磨粒聚集現象.實驗結果表明置于磁系所產生的磁場中的鋸絲形成了高梯度磁場,此高梯度磁場分成四個區域,有磁性磨粒聚集的區域(與磁場方向平行的鋸絲兩側區域)為順磁區,無磁性磨粒聚集的區域(與外部磁場垂直的鋸絲兩側區域)為逆磁區,實驗結果與仿真結果相符.
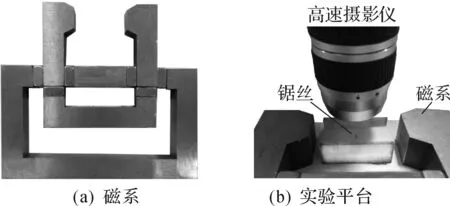
圖15 磁性磨粒觀測實驗平臺示意圖Fig.15 Schematic of the experimental platform for observations of magnetic abrasive grain
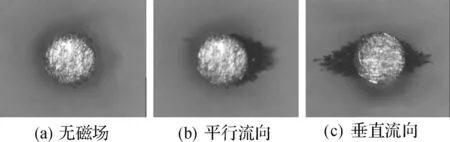
圖16 磁性磨粒吸附實驗結果(放大率×200)Fig.16 Experimental results of magnetic abrasive grains adsorption (magnification×200)
4 結 論
通過對組成磁系的磁軛、磁極接頭有限元仿真分析,分析表明:磁軛橫截面尺寸與永磁鐵橫截面尺寸相同時,磁軛漏磁最少,不易達到飽和磁感應強度;磁極接頭截面為直角梯形時,磁極間產生的勻強磁場強度較大,磁場均勻性最優.選用與永磁鐵截面尺寸相同的磁軛,截面為直角梯形的磁極接頭,組裝磁系.建立了磁系與鋸絲組成的仿真模型,仿真結果表明:所設計的磁系產生了勻強磁場并有聚磁效果;將鋸絲垂直置于勻強磁場中,能夠產生高梯度磁場并在其截面位置呈現四個區域,分為兩個順磁區和兩個逆磁區.在仿真研究的基礎上搭建了磨粒吸附觀測實驗平臺,通過對所設計的磁系進行磨粒吸附實驗,磨粒吸附實驗結果與仿真結果相符,置于磁系中的鋸絲周圍產生了四分區的高梯度磁場,所設計的磁系能夠產生良好的磨粒吸附效果.
[1] HSU C Y, CHEN C S, TSAO C C, et al. Free abrasive wire saw machining of ceramics[J]. International journal of advanced manufacturing technology,2009,40:503-511.
[2] M?LIER H J. Basic mechanisms and models of multi wire sawing[J]. Advanced engineering materials,2004,6(7):501-513.
[3] 葛培琪.固結磨料金剛石鋸絲制造技術[J].金剛石與磨料磨具工程,2006,15(6):12-13.
[4] GOODRICH A, HACKE P, WANG Q, et al. A wafer-based monocrystalline silicon photovoltaics road map: improvement opportunities for further reductions in manufacturing costs[J]. Solar energy materials and solar cells,2013,114:110-135.
[5] HUI C C, NHAT L V. Generation of diamod wire sliced wafer surface based on the distribution of diamond grits[J]. International journal of precision engineering and manufacturing,2014,15(5):789-796.
[6] LIEDKE T, KUNA M. Discrete element simulation of micromechanical removal processes during wire sawing[J]. Wear,2013,304(1/2):77-82.
[7] 張振彥,邰惠鑫,陳鑫如.太陽能光熱技術與建筑一體設計探討[J].浙江工業大學學報,2006,34(4):444-447.
[8] JONES S W, A Simulation study of the cost and economics of 450 mm wafers[J]. Semiconductor international,2005,8:13-15.
[9] MEI?NER D, SCHOENFELDER S, HURKA B, et al. Loss of wire tension in the wire web during the slurry based multi wire sawing process[J]. Solar energy materials and solar cells,2014,120:346-355.
[10] WATANABE T. Optimization quartz crystal slicing conditions using multi-wire-saw [C]//IEEE. International Frequency Control Symposium and PDA Exhibition. Yokohama: World Technology Instrument Co,2002:386-393.
[11] PENG W, QIU T W, YAO C Y, et al. Adsorption mechanism of magnetic induction free-abrasive grain and its effect on cutting performance of wire saws[J]. International journal of precision engineering and manufacturing,2015,16(8):1809-1816.
[12] PéREZ GALVN A, PLASTER B, BOISSEVAIN J, et al. High uniformity magnetic coil for search of neutron electric dipole moment[J]. Nuclear instruments and methods in physics research A,2011,660:147-153.
[13] 姚春燕,唐晨,裘騰威,等.線鋸切割中鋸絲的高梯度磁場數值和理論分析[J].現代制造工程,2016(2):16-21.
[14] 王以真.實用磁路設計[M].北京:國防工業出版社,2008.
[15] 劉樹貽.磁電選礦學[M].長沙:中南工業大學出版社,1994.
[16] 黃雄林.周期式水平磁系高梯度磁選機的磁路計算和聚磁介質研究[D].長沙:中南大學,2010.
[17] BIRSS R R, DENNIS B J, GERBER R. Particle capture on the upstream and downstream side of wires in HGMS[J]. IEEE transactions on magnets,1979,15(5):1362-1363.
(責任編輯:劉 巖)
Study of magnetic system in magnetic induction free abrasive wire sawing
YAO Chunyan, LI Hejie, ZHANG Wei, LIU Kun, LI Kuangwei, PENG Wei
(Key Laboratory of Special Purpose Equipment and Advanced Manufacturing Technology, Ministry of Education,Zhejiang University of Technology, Hangzhou 310014, China)
According to the technical requirements of magnetic induction free abrasive wire sawing, the magnetic system that can produce assisted uniform magnetic field around the saw was designed. The models of magnetic system’s magnetic yoke and pole joint were built with ANSYS finite element analysis software, the section size of the magnetic yoke and shape of magnetic pole joint were set by simulation. the magnetic system were built according to the simulation results of the magnetic yoke,pole joint and the magnetic loop design principle. The magnetic characteristics of the wire placed centrally in the magnetic system were simulated. It is found that the designed magnetic system can produce an uniform magnetic field with a certain effect of flux concentration. Furthermore the wire in the designed magnetic system can form a high gradient magnetic field, which distributes regularly. The results verify that the designed magnetic system can produce good abrasive particle adsorption effect, when the magnetic abrasive grains are absorbed to the surface of the wire.
wire sawing; magnetic system; finite element method; high gradient magnetic field
2016-11-02
國家自然科學基金資助項目(51475427)
姚春燕(1971—),女,浙江杭州人,副教授,研究方向為精密加工技術和圖像處理技術,E-mail:ycy@zjut.edu.cn.
TN 305.1
A
1006-4303(2017)04-0376-05
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23