基于自適應方法的欠驅動AUV地形跟蹤控制
2017-07-05 09:37:28白繼嵩龐永杰萬磊張英浩張強
電機與控制學報 2017年6期
白繼嵩, 龐永杰, 萬磊, 張英浩, 張強
(哈爾濱工程大學 水下機器人技術重點實驗室,黑龍江 哈爾濱 150001)
基于自適應方法的欠驅動AUV地形跟蹤控制
白繼嵩, 龐永杰, 萬磊, 張英浩, 張強
(哈爾濱工程大學 水下機器人技術重點實驗室,黑龍江 哈爾濱 150001)
為保證欠驅動智能水下機器人(AUV)面對干擾時具有更高精度的地形跟蹤能力,提出一種自適應地形跟蹤控制方法。首先,對某型欠驅動AUV進行了結構分析,建立了相關運動學及動力學模型;然后,提出一種結合模糊思想的自適應地形跟蹤策略,并利用自抗擾控制建立相應運動控制器;最后,分別進行兩組對比實驗,以測試所設計地形跟蹤方法的有效性。實驗結果表明,所設計的欠驅動AUV自適應地形跟蹤控制方法具有良好的響應能力,并且,相比于傳統比例-積分-微分(PID)控制方法,能夠更有效地抑制干擾所造成的震顫現象,具有更高的控制精確度。該控制方法的研究對提高欠驅動AUV在進行地形跟蹤任務時的智能性具有一定意義。
控制科學與技術;智能水下機器人;欠驅動;地形跟蹤控制;自適應;模糊控制;自抗擾控制方法
0 引 言
欠驅動智能水下機器人(autonomous underwater vehicle,AUV)是一種獨立控制輸入維數少于系統自由度的潛水器[1]。伴隨人類對海洋資源的開發深入,欠驅動AUV逐漸開始承擔海底石油管道檢查以及水底地形探測等任務。這些任務都需要欠驅動AUV具有良好的地形跟蹤能力。
所謂地形跟蹤,是指AUV以合適的方式下潛到作業水深后,與水底保持一定高度運動的能力。在此方面,國內外已有多位學者進行了相關研究。Silvestre Carlos等[2]利用水聲設備測量地形時的聲學特征,來對AUV進行控制指令下達,并以INFANTE AUV進行了仿真測試;萬磊等[3]為實現欠驅動AUV的精確跟蹤控制,提出自適應模糊反演滑模控制系統,解決其水平面航跡跟蹤問題;周煥銀等[4]針對自主水下機器人數學模型的強非線性及所受海流干擾無法確定等特點,利用神經網絡所具有的自適應控制實現對不確定模型與干擾項進行補償控制,提高自主水下機器人運動控制的魯棒性;劉云龍等[5]利用具有光滑性和飽和性的sigmoid函數,提出一種水下機器人軟變結構控制策略。Adhami-Mirhosseini Aras等[6]利用事先測得的目標地形數據,在AUV執行地形跟蹤任務前,生成跟蹤路徑,從而將地形跟蹤問題,轉化為路徑跟蹤問題。因而,從前人的研究成果中可以看出,目前主要有兩種研究趨勢,一種是將新的控制算法或控制策略引入到AUV地形跟蹤控制領域;另一種則是側重于提升AUV感知外界環境的能力,將傳感器數據進行融合或深入分析,從而獲得跟蹤地形的更多信息。
結合前人的研究思路,本文側重于對運動控制方面的完善:一方面,設計合適的控制策略;另一方面,引入優秀的控制算法。所以,針對欠驅動AUV設計了結合模糊控制以及自抗擾控制的自適應地形跟蹤方法,以期獲得最優的控制效果。
1 運動模型的建立
1.1 控制對象及坐標系
控制研究對象為哈爾濱工程大學設計的某型AUV,其主體大致成細長回轉體,運動執行器只有安裝于艇體艉部的舵、翼和主推各一套,屬于典型的欠驅動控制方式。為研究問題和后文敘述方便,在此分別建立大地坐標系E-ξζ和艇體坐標系O-xz,如圖1所示。E-ξζ是慣性坐標系,而O-xz屬于非慣性坐標系,并且O-xz的原點O與AUV艇體的重心G重合。
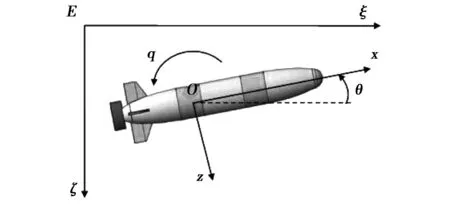
圖1 AUV外觀及建立的坐標系Fig.1 Appearance of AUV and establishment of the coordinate system
圖1中的θ與q是AUV的縱傾角θ和相應角速度,并且正方向如圖所示。
1.2 運動學及動力學模型
由文獻[7]可知,當AUV在垂直面內運動時,其運動學模型及動力學模型可分別表示為式(1)和式(2)。

(1)

(2)



C(V)為向心力矩陣,可表示為


D(V)為阻尼矩陣,可表示為


F0為零升力矩陣,可表示為

Z0和M0分別是由于AUV艇體上下水平面不對稱引起的垂向力和艏艉中剖面不對稱引起的縱傾力矩。τ為控制輸入力,可表示為:τ=[X,Z,M]T,X、Z和M分別是縱向控制力、垂向控制力和縱傾力矩,由于所研究對象為欠驅動AUV,因而Z=0。f為干擾力,m為AUV的質量,I為AUV在O-xz面內的轉動慣量,F(·)和M(·)為相應的水動力系數。
2 地形跟蹤策略
2.1 欠驅動AUV地形跟蹤
對于欠驅動AUV而言,在其艇體垂向并沒有相應的運動執行機構,因而無法直接提供控制力。若想讓欠驅動AUV實現地形跟蹤功能,需要設計一種合適的控制策略來實現“高度”、“深度”以及“縱傾”三者之間的轉化,進而完成跟蹤任務。“高度”、“深度”以及“縱傾”之間的轉化關系可以通過式(3)和式(4)完成。
ζd=ζP+hP-h0,
(3)
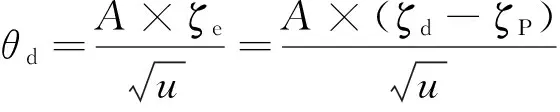
(4)
結合圖2做進一步說明。當AUV處于位置P時,AUV會通過安裝于其上的深度計和高度計分別獲得當前深度ζP和當前高度hP,以此作為控制的基礎。若AUV需要保持與跟蹤地形之上高度為h0的位置,則可首先通過式(3)獲得期望深度ζd,然后通過式(4)獲得期望縱傾角θd。ζe為期望深度ζd與當前深度ζP之差,u為當前AUV航速,A為可調參數,且A<0。為保證AUV在控制過程中避免危險的姿態,可設定“安全閾值”。當解算出的θd超過設定閾值,則按安全閾值進行控制輸入。

圖2 “高度-深度-縱傾”關系圖Fig.2 Relation graph of the height-depth-trim
2.2 自適應參數調整
若通過2.1中所示方法,利用相同參數的PID控制器,但是選用不同式(4)中的參數A,均令AUV下潛至5m,則可得到圖3所示結果。
從圖3中可看出,即使應用相同的控制器,但是通過設定不同的參數A,仍然可以得到不同的控制效果。對于欠驅動AUV而言,在進行大范圍運動過程中,外界環境有可能出現明顯變化,從而影響AUV的運動性能。如果此時不及時調整相應控制器參數,那么就難以獲得良好的控制效果。但如果調整控制器參數,就要先明確各控制參數之間的關系,若控制器參數較多,調整起來就會相對困難。因而,如果選用性能優良的控制器之后,一旦設定好參數,就停止調整,然后轉為調整控制策略中的其它參數,也是一種有益嘗試——對于欠驅動AUV的自適應地形跟蹤控制,只需調整跟蹤策略中式(4)的參數A。因而,結合模糊控制方法,將相關控制的參數A調整經驗融入其中,從而形成參數A的調整方法,如圖4所示。

圖3 固定參數深度控制Fig.3 Depth control with fixed parameter
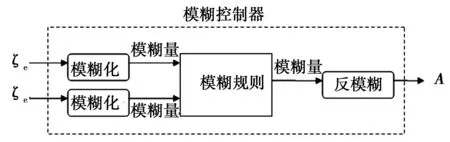
圖4 參數A調整方法Fig.4 Adjustment method for parameter A

所建立參數A調整方法,將2.1中跟蹤策略進一步完善,因而,欠驅動AUV的自適應地形跟蹤策略可表示為圖5所示。
3 運動控制器的建立
欠驅動AUV自適應地形跟蹤運動控制器的建立結合自抗擾控制方法。自抗擾控制(activedisturbancerejectioncontrol,ADRC)是由中科院系統科學院研究所韓京清研究員提出的一種控制方法,其繼承了傳統PID“基于誤差,消除誤差”的思想,并使用新設計的非線性反饋來克服一些傳統PID控制的缺點,具有超調小、控制精確度高以及抗擾能力強等特點[9]。主要由跟蹤微分控制器、擴張狀態觀測器、誤差的非線性反饋以及擾動估計補償等部分組成。結合二階ADRC控制器與AUV的垂直面相關運動參數,建立AUV水平舵控制器如圖6所示的信息流框架。

表1 模糊控制規則表

圖5 自適應地形跟蹤策略圖Fig.5 Strategy figure for self-adaptive bottom-following
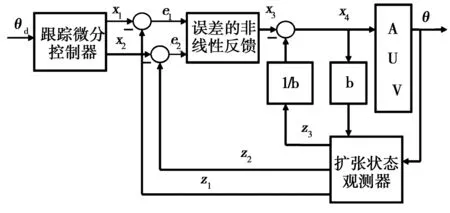
圖6 水平舵ADRC運動控制器信息流框架Fig.6 Information flow frame of ADRC motion controller with horizontal rudder
圖6中的θd和θ分別為AUV運動過程中的期望縱傾角和AUV當前縱傾角,其它變量為ADRC控制器計算所需的中間變量。跟蹤微分控制器、擴張狀態觀測器、誤差的非線性反饋及擾動估計補償各自都有若干種算法[10]。根據控制需求,將圖6中各部分算法分別設計如式(5)~式(8)所示。
跟蹤微分控制器:
(5)
式中:r為快速因子,h0為濾波因子,h為積分步長,函數fhan(x1,x2,r,h)的定義為:
擴張狀態觀測器:
(6)
式中:h為積分步長,β01,β02,β03為增益系數,a為可調參數,且函數fal(e,α,δ)定義為:
誤差的非線性反饋
x3=-fhan(e1,e2,r,h)。
(7)
式中:r為快速因子,h為積分步長。
擾動估計補償
x4=x3-z3×b-1。
(8)
式中b為可調參數。
通過ADRC,可以將縱傾角的控制問題,轉化為縱傾角偏差e1和縱傾角偏差變化率e2的鎮定問題。主推控制器設計與水平舵控制器類似,可以利用縱向速度與期望速度之間的偏差及偏差變化率作為控制器輸入,以控制AUV的工作航速。因而欠驅動AUV的完整自適應地形跟蹤控制器信息流框架可以表示為圖7。

圖7 欠驅動AUV自適應地形跟蹤控制器信息流框架Fig.7 Controller information flow frame of the underactuated AUVs self-adaptive bottom-following
4 仿真結果和分析

4.1 階躍跟蹤
此部分實驗,在無干擾情況下,選用期望跟蹤路徑為變化的“方波”,目的在于測試2.2中參數A的自適應調整方法的有效性。因而,所選運動執行器的控制器均基于ADRC建立,但是在跟蹤策略上不同:一種選用2.1中參數固定的跟蹤策略,另一種選用2.2中自適應跟蹤策略。設定期望航速為2kn,參數固定跟蹤策略的控制參數A=-0.03,起始位置為ζ=5m,則跟蹤控制結果如圖8所示。
從圖8(a)中可看出,兩種控制策略均能完成所設定“方波”的跟蹤,控制效果均準確,并且在控制過程中無超調的出現,但是在控制的響應時間上,可以看出兩者的不同。以20m定深為例,使用自適應跟蹤策略控制方法的響應時間為82s,而參數固定跟蹤策略控制方法的響應時間則為196s。在此過程中自適應方法的相應時間縮短了1倍多時間。此外,在其它上浮和下潛過程中也有類似結果。使用自適應跟蹤策略的控制,由于參數A在AUV運動過程中進行了動態調整和變化,如圖8(b),因而控制的響應時間更短,相比而言,具有更優的控制效果。
4.2 地形跟蹤
此部分實驗,在干擾條件下,跟蹤模擬地形,目的在于測試ADRC在結合自適應地形跟蹤策略之后的抗干擾能力,因而,分別選用ADRC控制器和工程中廣泛應用的PID控制器,但都結合2.2中的自適應跟蹤策略進行測試。對于水平舵控制器而言,ADRC方法的控制器參數:跟蹤微分控制器,h=h0=0.5,r=0.02;擴張狀態觀測器,h=0.5,a=0.2,β01=1/h,β02=1/3h2,β03=1/32h3;誤差的非線性反饋,h=0.5,r=0.02;擾動估計補償:b=1。PID方法的控制器參數為KP=5,KI=1,KD=2。干擾為E-ζ方向的隨機干擾以及ζ-E方向的瞬時干擾。隨機干擾,用于模擬外界環境干擾以及AUV自身的信號傳輸干擾,添加于整個仿真過程,數值如圖9(c)所示;瞬時干擾,用于模擬水底暗涌或噴流等所導致的環境突然變化,添加于t=1 200s,數值為300N。設定期望航速為2kn,縱傾安全閾值設為30°,起始位置為ζ=5m,預先定深20m,在t=500s時,變為保持在期望地形上方10m的跟蹤控制。控制結果如圖9所示。

圖8 階躍跟蹤結果Fig.8 Step tracking results
結合ADRC和PID的跟蹤方法均能完成跟蹤任務,面對地形的變化,具有良好的響應能力。但是分別從圖9(a)和圖9(b)中的局部放大圖中可以看出控制效果的不同。ADRC在t=1 210 s時出現的最大跟蹤偏差為1.9 m,而PID在此時出現的最大跟蹤偏差則為2.8 m。在此仿真過程中,相同干擾下,ADRC比PID方法的跟蹤偏差減小了近1 m。說明結合ADRC的自適應地形跟蹤控制方法能夠更好的抑制瞬時干擾造成的超調。對于控制過程中縱傾角的變化,從圖9(b)可知,結合ADRC的跟蹤方法,在控制過程中要更加平滑,而不同于PID控制的震蕩效果。出現這種情況的原因是PID控制器對于隨機干擾過于敏感造成的。

圖9 地形跟蹤結果及E-ζ 方向干擾Fig.9 Results of bottom-following control and disturbance in E-ζ注:實線:ADRC;虛線:PID;點劃線:跟蹤地形
5 結 論
兩組對比實驗的結果表明,本文所設計的欠驅動AUV自適應地形跟蹤方法,結合了模糊控制思想的靈活性以及自抗擾控制方法對干擾的抑制能力等優點。在控制過程中具有良好的響應效果,對于提高欠驅動AVU的行為能力方面具有一定的意義。當然,對于本文所設計的方法,在模糊控制規則的設計時,還需結合具體任務,在控制的“快速性”、控制“準確性”以及控制載體的運動能力等3個方面進行平衡,以期獲得最優效果。
[1] 王芳,萬磊,李曄.欠驅動AUV的運動控制技術綜述[J].中國造船,2010,51(2):227-241. WANG Fang,WAN Lei,LI Ye. A survey on development of motion control for underactuated AUV[J]. Shipbuilding of China,2010,51(2):227-241.
[2] SILVESTRE C,CUNHA R,PAULINO N,et al.A bottom-following preview controller for autonomous underwater vehicles[J]. IEEE Transactions on Control Systems Technology.2009,17(2):257-266.
[3] 萬磊,崔士鵬,張國成,等.欠驅動水下機器人航跡跟蹤控制[J].電機與控制學報,2013,17(2):103-111. WAN Lei,CUI Shipeng,ZHANG Guocheng,et al.Path following control of underactuated autonomous underwater vehicles[J]. Electric Machines and Control.2013,17(2):103-111.
[4] 周煥銀,劉開周,封錫盛.基于神經網絡的自主水下機器人動態反饋控制[J].電機與控制學報,2011,15(7):87-93. ZHOU Huanyin,LIU Kaizhou,FENG Xisheng. Dynamic feedback control based on ANN compensation controller for AUV motions[J]. Electric Machines and Control.2011,15(7):87-93.
[5] 劉云龍,高存臣,任啟峰,等.水下機器人基于sigmoid函數的軟變結構控制[J].電機與控制學報,2012,16(2):90-95. LIU Yunlong,GAO Cunchen,REN Qifeng,et al. Soft variable structure control based on sigmoid functions for autonomous underwater vehicles[J]. Electric Machines and Control.2012,16(2):90-95.
[6] 賈鶴鳴,宋文龍,周佳加.基于非線性反步法的欠驅動AUV地形跟蹤控制[J].北京工業大學學報,2012,38(12):1780-1785. JIA Heming,SONG Wenlong,ZHOU Jiajia. Bottom following control for an underactuated AUV based on nonlinear backstepping method[J]. Journal of Beijing University of Technology.2012,38(12): 1780-1785.
[7] MELO J,MATOS A.Bottom estimation and following with the MARES AUV[C]// OCEANS 2012 MTS/IEEE: Harnessing the Power of the Ocean. United States: IEEE Computer Society,2012:1-8.
[8] 李岳明,萬磊,孫玉山,等.水下機器人高度信息融合與欠驅動地形跟蹤控制[J].控制理論與應用,2013,30(1):118-121. LI Yueming,WAN Lei,SUN Yushan,et al.Altitude information fusion and bottom- following control for underactuated autonomous underwater vehicle[J]. Control Theory and Applications.2013,30(1):118-121.
[9] ADHAMI M A,YAZDANPANAH M J,AGUIAR A P.Automatic bottom-following for underwater robotic vehicles[J]. Automatica,2014,50(8):2155-2162.
[10] 施生達.潛艇操縱性[M]. 北京:國防工業出版社,1995.
[11] 李士勇.模糊控制[M]. 哈爾濱:哈爾濱工業大學出版社,2011.
[12] 韓京清.自抗擾控制器及其應用[J]. 控制與決策,1998,13(1):19-23. HAN Jingqing. Active disturbance rejection controller and its application[J]. Control and Decision.1998,13(1): 19-23.
[13] 韓京清.自抗擾控制技術—估計補償不確定因素的控制技術[M]. 北京:國防工業出版社,2009.
(編輯:賈志超)
Underactuated AUV′s bottom-following control based on self-adaptive method
BAI Ji-song, PANG Yong-jie, WAN Lei, ZHANG Ying-hao, ZHANG Qiang
(Science and Technology on Underwater Vehicle Laboratory,Harbin Engineering University,Harbin 150001,China)
To ensure that an underactuated autonomous underwater vehicle(AUV)has better control ability in the bottom-following task,one self-adaptive bottom-following control method is designed,which can decrease the influence of the environment disturbance. Firstly,made a structure analysis for one underactuated AUV,and built the corresponding kinematics and dynamics models. Secondly,offered one self-adaptive bottom-following strategy combined with fuzzy control,and designed the motion controller by active disturbance rejection control(ADRC).Finally,made two contrast simulations to evaluate the effectiveness of the designed method. The control results show that the self-adaptive bottom-following control method has a good response capability. And compared with PID,it has better control precision under the influence of interference. The research of this control method has certain significance in improving underactuated AUV’s intelligence under the bottom-following task.
control science and technology; autonomous underwater vehicle; underactuated; bottom-following control; self-adaptive; fuzzy control; active disturbance rejection control
2016 -07-01
國家自然科學基金(51309066)
白繼嵩(1985—),男,博士研究生,研究方向為水下機器人環境感知技術; 龐永杰(1955—),男,博士,教授,博士生導師,水下機器人總體技術; 萬 磊(1964—),男,研究員,博士生導師,研究方向為機器人總體規劃和系統集成技術; 張英浩(1987—),男,博士研究生,研究方向為水下機器人控制技術; 張 強(1981—),男,博士,講師,研究方向為水下機器人控制技術。
白繼嵩
10.15938/j.emc.2017.06.011
TM 312
A
1007-449X(2017)06-0083-06
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
兒童故事畫報(2019年5期)2019-05-26 14:26:14
數學大世界(2018年1期)2018-04-12 05:39:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56