靜基座下慣性平臺初始自對準技術
2017-07-07 13:28:35丁智堅張士峰楊華波
宇航學報 2017年6期
丁智堅,周 歡,張士峰,楊華波,蔡 洪
(1. 中國空氣動力研究與發展中心吸氣式高超聲速技術研究中心,綿陽621000;2. 中國工程物理研究院總體工程研究所,綿陽621900;3. 國防科學技術大學航天科學與工程學院,長沙410073)
?
靜基座下慣性平臺初始自對準技術
丁智堅1,周 歡2,張士峰3,楊華波3,蔡 洪3
(1. 中國空氣動力研究與發展中心吸氣式高超聲速技術研究中心,綿陽621000;2. 中國工程物理研究院總體工程研究所,綿陽621900;3. 國防科學技術大學航天科學與工程學院,長沙410073)
針對框架式慣性平臺系統能夠繞框架軸自主轉動的特點,提出一種基于粗對準+精對準的靜基座下慣性平臺快速初始自對準方法。該方法首先利用重力矢量隨地球自轉的特點,快速實現慣性平臺的粗對準。在此基礎上,通過設計加矩方案令平臺繞天向軸旋轉并采用Kalman濾波技術,完成慣性平臺的精對準。仿真算例表明,該方法能夠在720s內實現慣性平臺水平姿態角小于5"(1σ),方位姿態角小于12"(1σ)的自對準精度,有效地提高了系統的響應速度和導航精度。
慣性平臺;初始自對準;Kalman濾波;靜基座
0 引 言
慣性平臺導航系統憑借其高精度的優勢一直作為戰略導彈等武器系統導航制導與控制系統的核心設備[1-2]。同所有慣性導航系統一樣,慣性平臺在使用前需進行初始對準[3-5],其結果將直接影響武器系統的響應速度和打擊精度[6]。因此,一種快而準的慣性平臺初始對準技術一直是研究人員所追尋的目標[7-15]。
“調平”+“瞄準”方法是慣性平臺初始對準中常見的方法[9]。其中“調平”是指利用平臺上兩個水平加速度計,通過調平回路將平臺臺體調整至與水平面平行[9,16];“瞄準”是指在“調平”的基礎上,通過瞄準回路和多位置法進行尋北,完成慣性平臺的方位對準[16]。這種方法的基本原理淺顯易懂,采用的算法簡單,故在工程上得到了廣泛的應用。
然而,該方案存在以下缺陷[9-16]:
1) 對準與導航中慣性平臺工作狀態不一致。穩定回路與調平回路和瞄準回路是慣性平臺常見的三種工作狀態。采用“調平”+“瞄準”的方案時,平臺工作于調平回路和瞄準回路,而在實際導航中,平臺工作于穩定回路中[17]。由于不同的工作狀態導致慣性平臺的誤差特性及控制回路性能均不一樣,導致該方案的對準結果存在一定的偏差。
2) 對準時間較長。三浮陀螺儀在實際使用中,其浮子對外界運動信息較為敏感。特別地,在多位置瞄準過程中,當平臺粗加矩和精加矩之間相互切換時,即平臺由靜止轉入角運動狀態或由角運動轉為靜止狀態時,受浮子運動影響陀螺儀會存在瞬時較大偏差,進而影響系統輸出。故工程上通過延長平臺在每個靜態位置的時間并選用穩定時間段內的數據以保證初始對準的結果受陀螺儀浮子運動影響較小。然而,該方法增加了對準的時間。
3) 無法中斷并快速切入導航工作狀態。假設慣性平臺正在采用該方法進行初始對準,若突然接到發射命令,慣性平臺首先要終止初始對準,并迅速歸零并裝載前次對準結果,進入導航狀態。該過程繁瑣復雜并對導彈的響應速度產生嚴重的影響。
針對上述問題,本文展開了慣性平臺靜基座下的初始對準技術的研究。借鑒捷聯慣導系統中基于慣性系粗對準方法[19]的思路,提出了一種采用粗對準+精對準的慣性平臺高精度快速初始對準方案。仿真算例表明,本文所提出的方法能夠在720s內實現慣性平臺水平姿態角小于5"(1σ),方位姿態角小于12"(1σ)的自對準精度,大幅度地提高了導彈的響應速度和打擊精度。
1 靜基座下慣性平臺粗對準方案
如圖1所示,從慣性空間角度看,地球上某處的重力矢量隨地球一起繞地球自轉軸轉動。由于地球自轉角速度大小精確已知,故不同時間內同一地點的重力矢量相對慣性空間轉動的角度信息中包含了地球北向的信息。因此,基于該特性,利用不同時刻重力矢量在慣性系中的投影等信息即可實現慣性平臺的粗對準。

圖1 地球上某處重力矢量隨地球轉動示意圖Fig.1 The rotation of the gravity vector along the Earth′s axis
1.1 相應坐標系定義
本文所研究的框架式慣性平臺由三個三浮陀螺儀和三個石英加速度計組成,各儀表的安裝取向如圖2所示[6]。
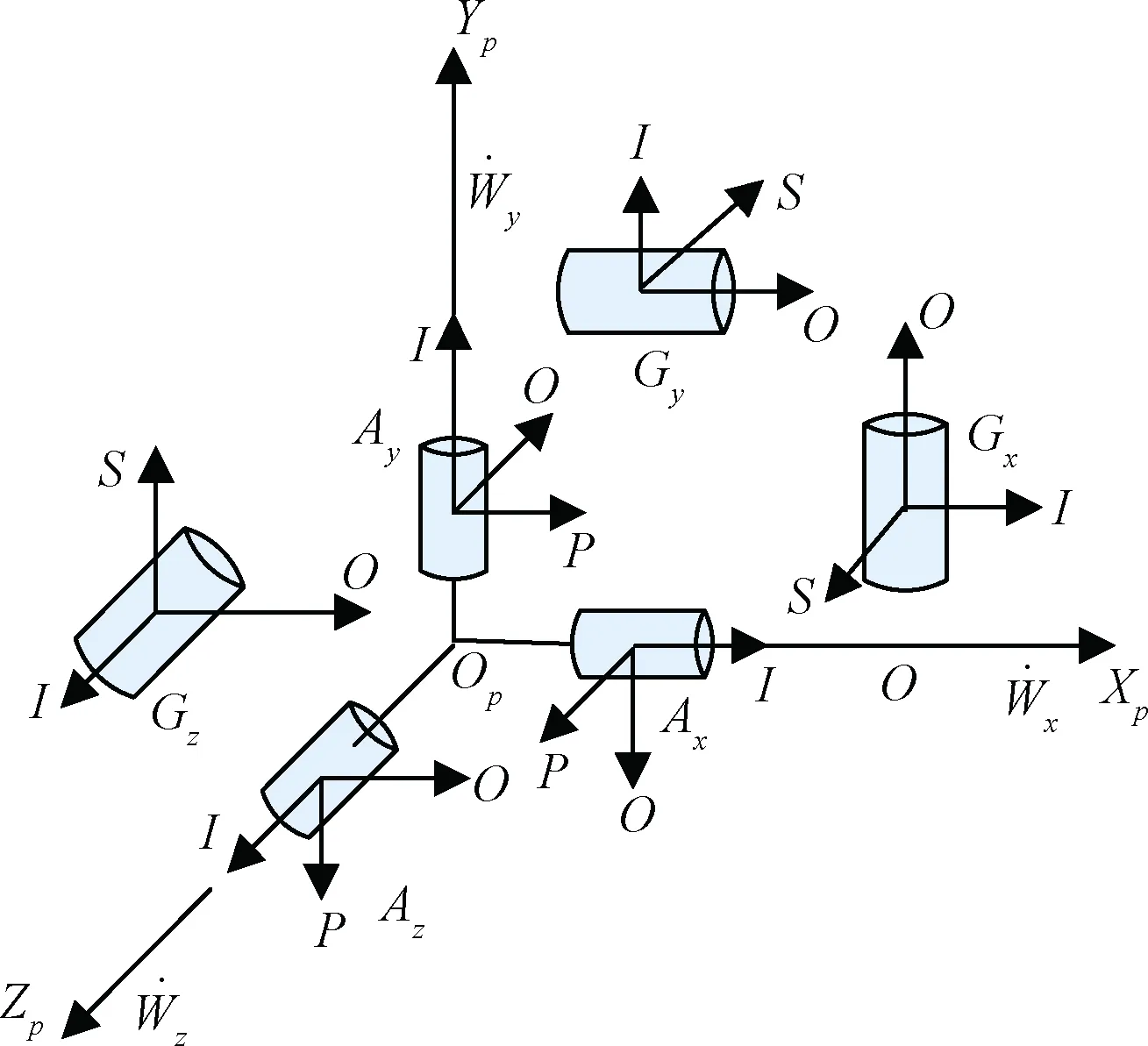
圖2 平臺幾何結構Fig.2 Platform geometry
為了方便后續工作,定義如下坐標系:
1)平臺坐標系(p系)
取平臺幾何中心O為原點,Xp軸與X石英加速度計敏感軸平行,Yp軸平行于X和Y石英加速度計敏感軸所確定的平面,并與Xp軸垂直,Zp軸與Xp軸和Yp軸構成右手坐標系。
2)地心坐標系(e系)
坐標系原點為地心Oe,Xe軸位于赤道平面內,指向地球本初子午線,Ze軸沿地球自轉軸指向北極,Ye軸與Xe軸和Ze軸構成右手坐標系。
3)地心慣性坐標系(i系)
坐標系原點為地心Oe,Xi軸指向平臺粗對準起始時刻t0所在的子午線,Zi軸沿地球自轉軸指向北極,Yi軸與Xi軸和Zi軸構成右手坐標系。
4)平臺慣性坐標系(ip0系)
坐標系原點與平臺幾何中心O重合,選取t0時刻的平臺坐標系作為平臺慣性坐標系。該坐標系為慣性坐標系,并不隨平臺轉動而轉動。
5)計算平臺坐標系(c系)
將計算機所建立的數字平臺坐標系定義為計算平臺坐標系。由于初始對準誤差、安裝誤差以及陀螺儀漂移等誤差因素,使得該坐標系與p系并不重合,存在小角度偏差。
6)導航坐標系(n系)
選擇當地地理系作為導航坐標系,其Xn軸指向北向,Yn軸指向天向,Zn軸指向東向。
1.2 靜基座下慣性平臺粗對準方案
設tk時刻,平臺所在的地理位置表示為(λk,Lk),其中λk和Lk分別為tk時刻經度與緯度,故此時慣性平臺姿態矩陣可寫為
(1)

(2)
(3)
式中:θ=ωie(tk-t0),ωie為地球自轉角速度大小。
(4)
(5)

(6)
由慣性平臺工作原理可知[18-19]
(7)

(8)
考慮到式(6)和式(8),短時間段內由平臺穩定回路可保證[19]
(9)
此外,對于慣性平臺而言,其石英加速度計組的輸出可表示為[19-21]
(10)

加速度計輸入aAI可寫為
(11)


(12)
則式(10)可改寫為
(13)
將式(1)代入式(13),有
(14)
將式(1)、(4)、(5)及(9)代入式(14),有
(15)
(16)

(17)
根據式(17),在t1及t2時刻(t2>t1>t0)有
(18)

(19)
綜上所述,靜基座下慣性平臺粗對準過程如下:
步驟 1. 慣性平臺啟動、平臺框架歸零;
步驟2. 慣性平臺切換至導航狀態,采集加速度計的輸出;
2 靜基座下慣性平臺精對準方案
對比式(18)與(19)可知,粗對準過程中忽略了慣性器件自身誤差,故其結果不能滿足系統精度要求。通過將平臺初始粗對準結果作為濾波器初值,設計加矩方案令平臺繞天向旋轉,并采用閉環EKF算法,則能夠實現靜基座下慣性平臺精對準。
2.1 系統模型
考慮到初始對準用時較短,可將平臺漂移視為小量,故系統模型可用失準角模型描述,即
(20)
式中:φ表示p系與c系之間的誤差角矢量,[·×]表示矢量的叉乘矩陣。
考慮到式(7),有
(21)
另一方面,靜基座下加速度輸出誤差可表示為
Z=Za+gc=
(22)
式(21)與式(22)構成了慣性平臺靜基座下精對準系統模型。
2.2 濾波策略
從式(21)可以看出,隨著時間的累積失準角會逐漸變大,不再滿足小角度假設條件,進而導致系統模型失效。因此,在使用時,必須采用閉環濾波策略,以此保證失準角始終滿足小角度假設,避免因模型失準導致的濾波發散。
對于慣性平臺初始對準系統而言,閉環濾波的目的就是通過對系統的調整,使p系與c系重合。傳統方法直接利用濾波結果,對平臺加矩,調整平臺實際的姿態,使p系逐步向c系靠攏。然而該方法需要根據濾波結果對平臺進行實時加矩,這對平臺控制回路要求較高并存在一定的不可控性,特別地,當濾波結果偏差較大或錯誤時會將平臺姿態調整至錯誤方向,容易導致平臺“飛轉”,發生意外。另一方面,傳統方法無法進行線下數據處理,所采集的數據對后續試驗分析的用處有限。
針對上述問題,本文提出一種基于計算坐標系調整的閉環濾波策略。
這種閉環濾波策略無需對平臺姿態進行實時調整,而是利用濾波結果對計算機所建立的計算坐標系進行調整,使c系向p系靠攏,最終實現閉環濾波。同傳統方法比,該方案實施較為簡單,無需調整平臺姿態,保證了平臺工作的穩定和安全,同時具有能夠實現線下濾波、事后數據處理等優勢。
(23)

2.3 平臺加矩方案設計
由式(21)可知,僅考慮平臺失準角與陀螺儀零偏時,系統動力學方程可改寫為
(24)
考慮到式(10),忽略高階小量,式(22)可展開為
(25)

平臺加矩方案中所需設計參數主要有加矩大小和加矩方向。本文從狀態量可觀性角度出發,分析了加矩方案對系統的影響,給出了設計方案。
1)加矩方向設計
(1)ωcmdx=ωcmdy=ωcmdz=0
從式(24)、(25)可以看出,當平臺不加矩時,系統模型可表示為
(26)
(27)
(2)ωcmdy≠0,ωcmdx=ωcmdz=0
忽略平臺與地理系之間水平方向的小角度,此時加矩方案可近似視為向平臺天向加矩。此時有gc≈gn=[0,-1,0]T,系統模型可近似為
(28)
(29)

從理論上看,加速度計輸出是系統唯一的觀測量,由于重量矢量方向與天向相反,繞天向旋轉的加矩方案對系統可觀性影響不大,這與捷聯系統的結論不一樣。
2)加矩大小設計
從式(24)可以看出,當平臺轉動角速度過大時,由轉速引起的失準角增量會遠遠大于由陀螺零偏作用的效果,進而增加陀螺儀零偏與平臺失準角之間的分離難度。而過小的轉動角速度,則會增加對準的時間,不滿足武器系統快速響應的作戰需求。
另一方面,從系統模型可以看出,重力矢量是激勵系統的主要因素,而不同的平臺位置,則保證了重力矢量在每個軸都有充分的激勵。因此,位置可以視為加矩大小的主要設計原則。
3)其他約束條件
由慣性平臺工作原理可知,為了避免平臺“鎖定”,平臺中框(Y陀螺)加矩不能超過90°或在90°附近。
此外,為減小平臺各軸之間的耦合效應,應避免對平臺各軸同時加矩。
綜合考慮各方因素,本文設計的加矩方案如下所示:
步驟1. 向平臺X方向加矩180s;
步驟2. 向平臺Z方向加矩180s;
加矩大小為0.5°/s。
值得注意的是,本文只給出了平臺加矩方案的設計準則與約束條件,并在此基礎上,設計了一條簡單、易實施的非最優的施矩方案。
綜上所述,本文所設計的慣性平臺初始對準方案共需要780s(包含粗對準60s),13min,且整個對準過程平臺工作狀態不需切換,加矩方案包含的平臺動作較少,實施較為簡便,為慣性平臺快速精準初始對準提供了一種新的思路。
3 仿 真
3.1 仿真條件
這里假設慣性平臺在出廠前已經經過標定補償且殘差為小量。為了充分驗證所提方案的適用性,將平臺初始姿態角與平臺系統參數設置為隨機量,其中水平姿態角為在±5°內隨機分布,方位角在±180°內隨機分布,其余平臺誤差狀態量的均值與標準差大小如表1所示(部分符號定義見文獻[19])。
仿真中忽略加速度計桿臂效應和平臺穩定回路誤差,采樣周期為0.1s,加矩指令生成周期為0.1s,濾波周期為0.1s,加速度計輸出為速度增量,其測量噪聲為0.1μg·s,當量誤差為1μg·s,陀螺儀測量噪聲為0.001°/h。濾波器姿態角初值為粗對準結果,其余初值設置為零,Q與R根據慣性儀表噪聲特性設置,P矩陣設置為對角陣。仿真中所有積分均采用4階Runge-Kutta積分算法。
3.2 仿真結果與分析
為了充分考核與驗證所提方案的有效性,采用蒙特-卡洛(Monte-Carlo,MC)仿真手段,仿真次數為500次,平臺姿態角仿真真值如圖3~5所示。其中圖3和圖5為500次MC仿真的水平姿態角真值,圖4為500次MC仿真的方位角真值。從圖3~5可以看出,平臺水平姿態角真值在±5°內隨機分布,方位角真值在±180°內隨機分布,仿真結果與設計相符。
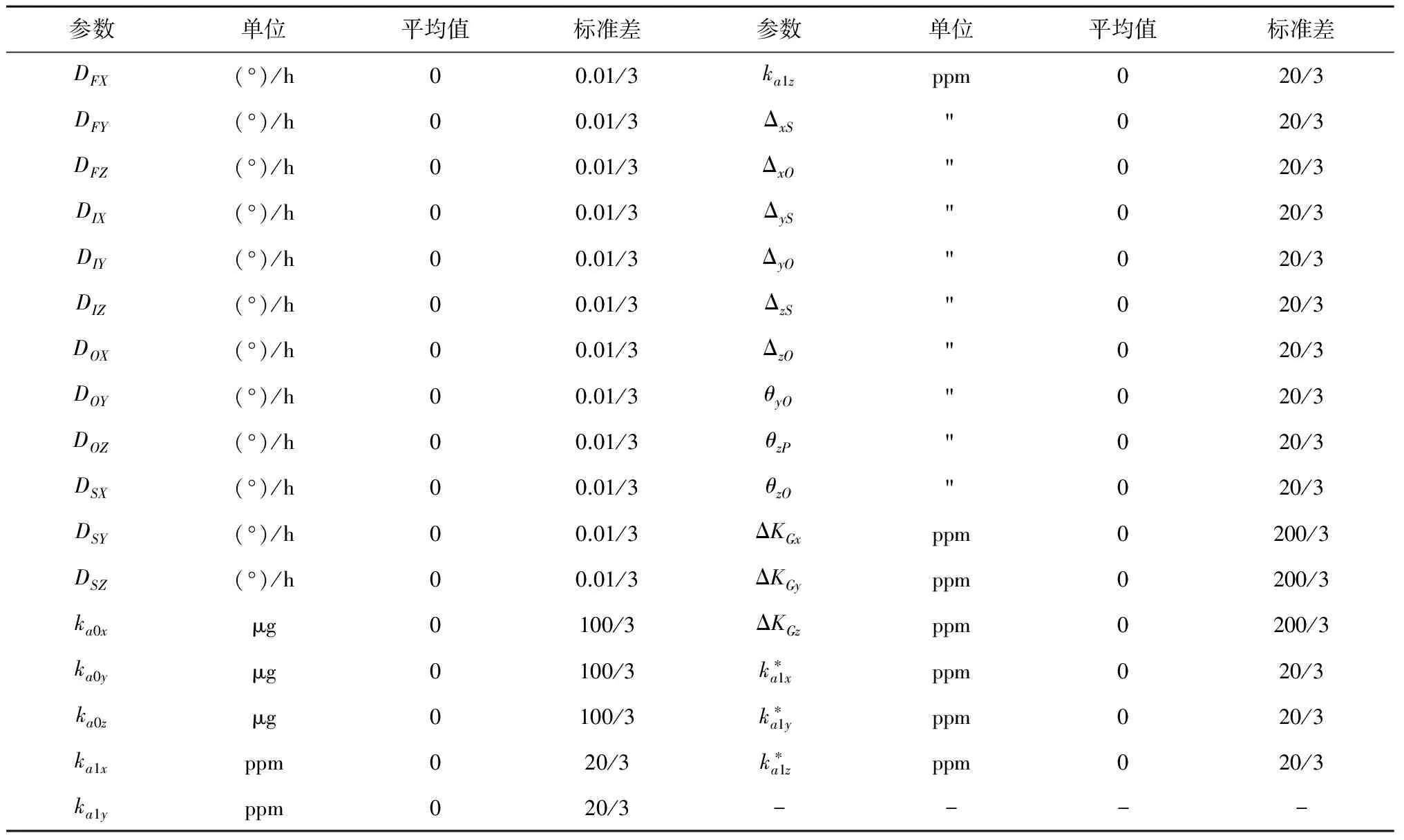
表1 系統狀態量初值Table 1 Initial state values and simulation results
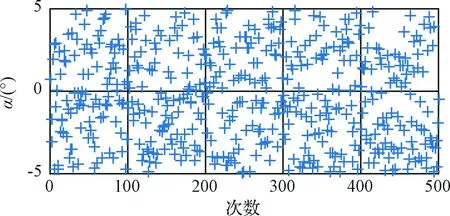
圖3 水平姿態角α真值Fig.3 The true value of horizontal angle α

圖4 方位姿態角β真值Fig.4 The true value of azimuth angle β

圖5 水平姿態角γ真值Fig.5 The true value of horizontal angle γ
利用本文所提的粗對準加精對準方法進行初始對準,其中前60s數據用于粗對準,后720s數據用于精對準,整個初始對準共需13min左右。500次仿真結果如下。
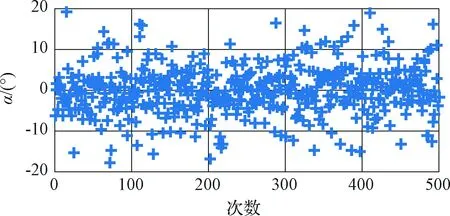
圖6 姿態角α粗對準估計偏差Fig.6 The estimated errors of α in coarse alignment
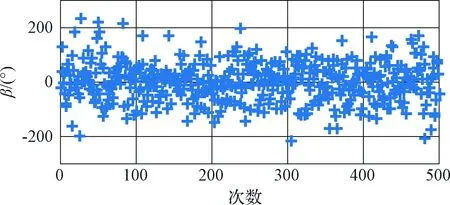
圖7 姿態角β粗對準估計偏差Fig.7 The estimated errors of β in coarse alignment
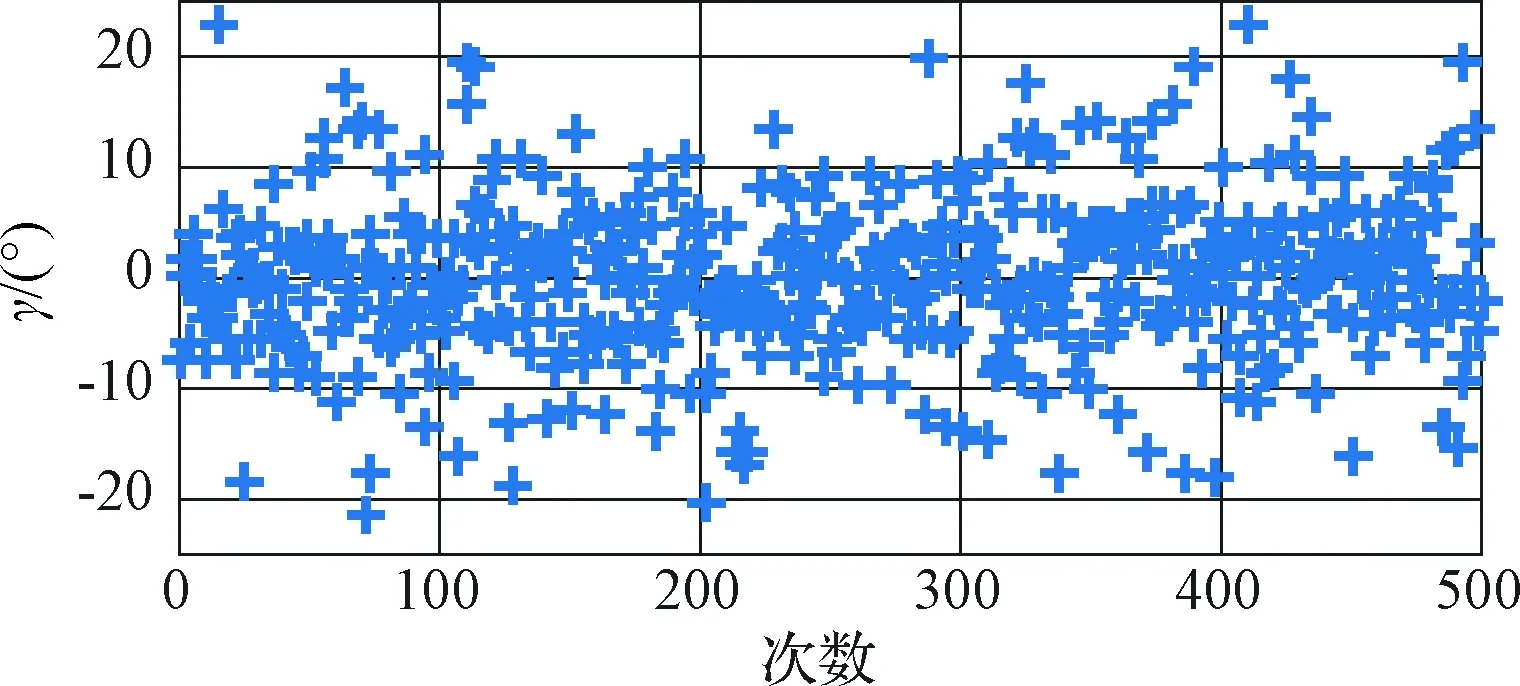
圖8 姿態角γ粗對準估計偏差Fig.8 The estimated errors of γ in coarse alignment
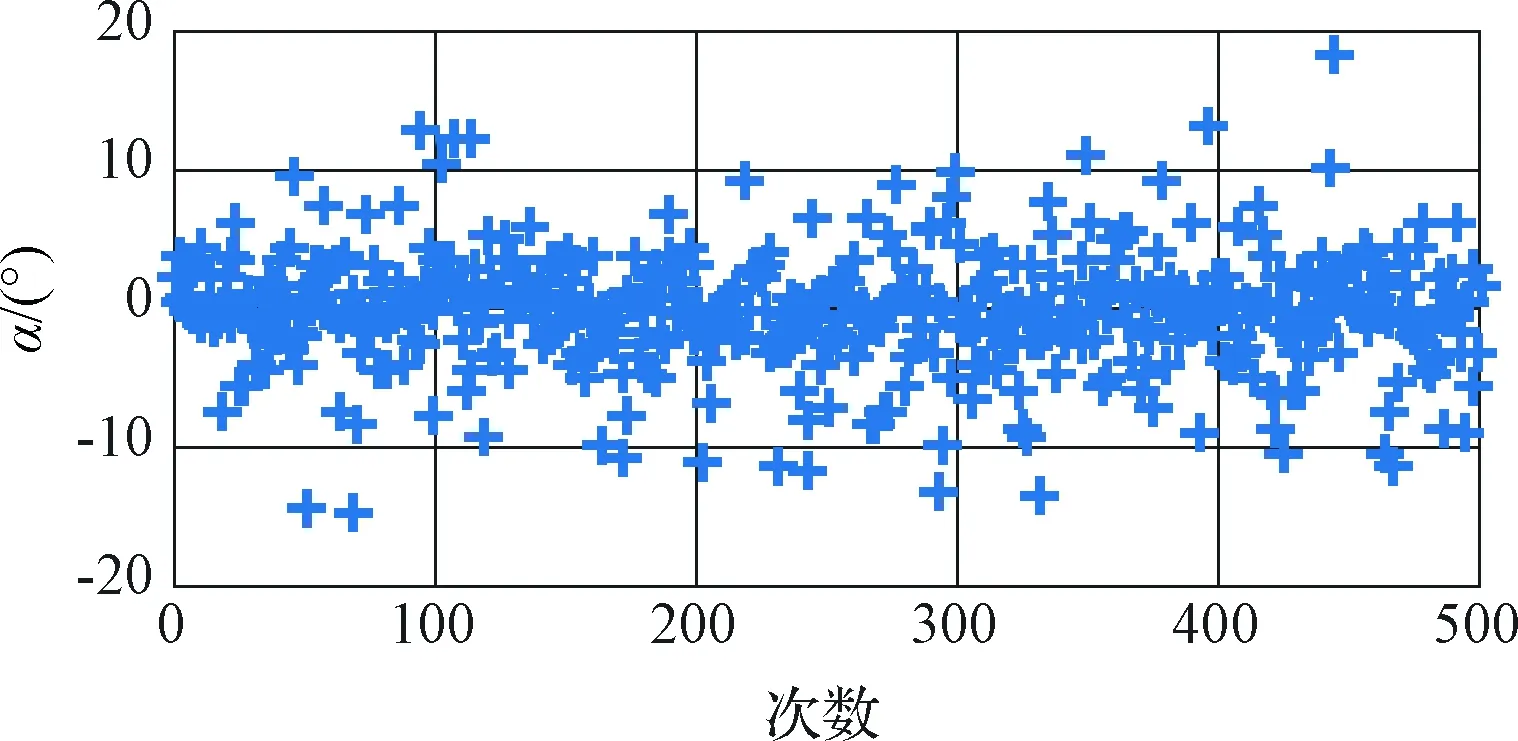
圖9 姿態角α精對準估計偏差Fig.9 The estimated errors of α in fine alignment

圖10 姿態角β精對準估計偏差Fig.10 The estimated errors of β in fine alignment

圖11 姿態角γ精對準估計偏差Fig.11 The estimated errors of γ in fine alignment
圖6~8為粗對準估計偏差。從圖6~7可以看出,平臺姿態角估計偏差基本服從正態分布,其中水平姿態角最大誤差不超過20",方位角最大誤差相對于水平姿態角對準誤差較大,最大誤差超過了200"。上述結果表明了粗對準結果不能滿足武器系統要求,尤其是方位角精度較差,這與方位角可觀性較差有關,因此,需要通過精對準進一步提高對準精度。
圖9~11為500次精對準仿真中姿態角估計偏差結果示意圖。從圖9~11可以看出,各姿態角估計偏差服從正態分布。與粗對準結果相比,平臺水平姿態角最大偏差減小至30"以內,方位角最大偏差降低至90"以內。
為進一步對比分析粗對準和精對準結果,對上述仿真結果進行統計分析,結果如表2所示,其中估計偏差均值與標準差的單位均為角秒。
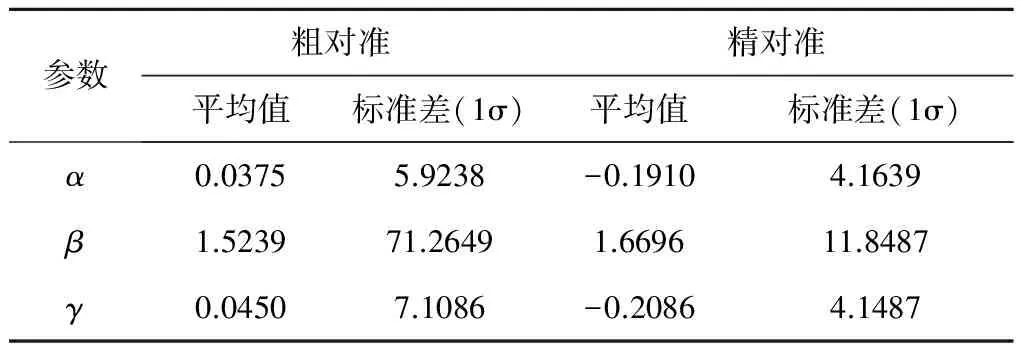
表2 500次仿真的估計偏差Table 2 The estimated errors of 500 simulations
從表2可以看出,經過精對準,粗對準的水平姿態角最大標準差從7.1086"(1σ)降低至6.1639"(1σ),方位角標準差能夠從71.2649"(1σ)減少至11.8487"(1σ),有效提高了慣性平臺初始對準精度。
4 結 論
針對慣性平臺初始自對準問題,本文提出了一種粗對準+精對準的快速初始自對準方法。其中粗對準利用了重力矢量繞地球自轉軸旋轉的特性,能夠在短時間內為精對準提供初值;精對準則采用了Kalman濾波技術,通過加矩方案設計,令平臺繞天向軸快速旋轉,提高了方位角的可觀測度。仿真算例表明,該方法能夠在420 s內實現慣性平臺初始自對準,其中水平角對準精度優于5"(1σ),方位角對準精度優于12"(1σ),有效地解決了慣性平臺初始自對準問題,同時避免了傳統方法存在的弊端,提高了慣性平臺性能,具有良好的應用前景。
[1] Hanching G W, Thomas C W. High-accuracy inertial stabilized platform for hostile [J]. IEEE Control Systems, 2008, 2: 65-85.
[2] 李安梁, 蔡洪, 白錫斌. 浮球式慣導平臺的自適應模糊滑膜穩定控制[J]. 國防科技大學學報, 2013, 35(6): 41-45. [Li An-liang, Cai Hong, Bai Xi-bin. Adaptive fuzzy sliding mode stabilization control for floated inertial platform [J]. Journal of National University of Defense Technology, 2013, 35(6): 41-45.]
[3] Ding Z J, Cai H, Yang H B. An improved multi-position calibration method for low cost micro-electro mechanical systems inertial measurement units [J]. Proc IMechE Part G: J Aerospace Engineering, 2015(10): 1919-1930.
[4] 梅春波, 秦永元, 游金川. SINS 基于非線性量測的大失準角初始對準算法[J]. 宇航學報, 2016, 37(3): 291-297. [Mei Chun-bo, Qin Yong-yuan, You Jin-chuan. Nonlinear measurement based SINS initial alignment algorithm under large misalignment angle [J]. Journal of Astronautics, 2016, 37(3): 291-297.]
[5] 郭澤, 繆玲娟. 基于KF/UKF組合濾波的SINS大方位失準角初始對準[J]. 宇航學報, 2014, 35(2): 163-170. [Guo Ze, Miao Ling-juan. KF/UKF based SINS initial alignment under large azimuth misalignment angle [J]. Journal of Astronautics, 2014, 35(2): 163-170.]
[6] 丁智堅, 蔡洪, 楊華波, 等. 浮球式慣性平臺連續翻滾自標定自對準方法[J]. 國防科技大學學報, 2015, 37(3): 148-154. [Ding Zhi-jian, Cai Hong, Yang Hua-bo, et al. Continuous self-calibration and self-alignment method for floated inertial platform [J].Journal of National University of Defense Technology, 2015, 37(3): 148-154.]
[7] 丁智堅, 蔡洪,張文杰. 慣性平臺自標定中慣性儀表安裝誤差可觀測性分析[J]. 國防科技大學學報, 2016, 38(5): 127-136. [Ding Zhi-jian, Cai Hong, Zhang Wen-jie. Observability analysis for misalignments of inertial sensors in inertial platform self-calibration [J]. Journal of National University of Defense Technology, 2016, 38(5): 127-136.]
[8] Ding Z J, Cai H, Yang H B. Novel transfer alignment of ship-borne gimbaled inertial navigation systems [J]. Trans. Japan. Society Aeronautic Space Science, 2014, 2: 93-100.
[9] 陸元九. 慣性器件[M]. 北京: 宇航出版社, 1993: 369-437.
[10] 楊華波, 蔡洪, 張士峰. 高精度慣性平臺誤差自標定方法[J]. 上海航天, 2006, 2: 33-36. [Yang Hua-bo, Cai Hong, Zhang Shi-feng. Calibration for the errors of a high accurate inertial platform [J]. Aerospace Shanghai, 2006, 2: 33-36.]
[11] 楊華波, 蔡洪, 張士峰, 等. 高精度慣性平臺連續自標定自對準技術[J]. 宇航學報, 2006, 27(4): 600-604. [Yang Hua-bo, Cai hong, Zhang Shi-feng, et al. Continuous calibration and alignment techniques for a high precision inertial platform [J]. Journal of Astronautics, 2006, 27(4): 600-604.]
[12] 曹淵, 張士峰, 楊華波, 等. 慣導平臺誤差快速自標定方法研究[J]. 宇航學報, 2011, 32(6): 1281-1287. [Cao Yuan, Zhang Shi-feng, Yang Hua-bo, et al. Research on rapid self-calibration method for inertial platform [J]. Journal of Astronautics, 2011, 32(6): 1281-1287.]
[13] 曹淵, 張士峰, 楊華波, 等. 一種新的慣性平臺快速連續旋轉自對準方法[J]. 兵工學報, 2011, 32(12): 1468-1473. [Cao Yuan, Zhang Shi-feng, Yang Hua-bo, et al. Fast self-alignment method for inertial platform through continuous rotation [J]. Acta Armamentarll, 2011, 32(12): 1468-1473.]
[14] Cao Y, Cai H, Zhang S F, et al. A new continuous self-calibration scheme for a gimbaled inertial measurement unit [J]. Measurement Science and Technology, 2012, 23(1): 385-394.
[15] 肖正林, 錢培賢, 徐軍輝. 三軸平臺快速自標定與自對準方法探討[J]. 宇航學報, 2006, 27(2): 222-226. [Xiao Zheng-lin, Qian Pei-xian , Xu Jun-hui. Research on rapid auto-calibration and auto-alignment method for three-axis platform [J]. Journal of Astronautics, 2006, 27(2): 222-226.]
[16] Titterton D H, Weston J L. Strapdown inertial navigation technology (2nd Ed) [M]. London, United Kingdom: Peter Peregrinus Ltd. on behalf of the Institute of Electrical Engineers, 2004.
[17] 劉靜, 朱志剛. 搖擺條件下慣性平臺系統動態特性分析[J]. 宇航學報, 2011, 32(9): 1878-1883. [Liu Jing, Zhu Zhi-gang. Dynamic performance analysis of inertial platform system on rocking base [J]. Journal of Astronautics, 2011, 32(9): 1878-1883.]
[18] 肖正林, 牟建華. 慣性平臺動態誤差消除方法研究[J]. 宇航學報, 2008, 29(2): 191-194. [Xiao Zheng-lin,Mou Jian-hua. The method to cancel the dynamic level error of inertial navigation platform [J]. Journal of Astronautics, 2008, 29(2): 191-194.]
[19] 秦永元, 嚴恭敏, 顧冬晴, 等.搖擺基座上基于信息的捷聯慣導粗對準研究[J].西北工業大學學報, 2005, 23(5): 681-684. [Qin Yong-yuan, Yan Gong-min, Gu Dong-qing, et al. A clever way of SINS coarse alignment despite rocking ship [J]. Journal of North Western Polytechnical University, 2005, 23(5): 681-684.]
[20] Hellings F J. Application of extended Kalman filtering to a dynamic laboratory calibration of an inertial navigation system [R]. AD 763718: 77-118.
[21] Sifter D J, Henderson V D. An advanced software mechanization for calibration and alignment of the advanced inertial reference sphere [C]. Eighth Guidance Test Symposium, HAFB, New Mexico, USA, May 13-15, 1977.
[22] 萬德鈞, 房建成. 慣性導航初始對準[M]. 南京:東南大學出版社, 1995:36-45.
通信地址:四川綿陽涪城區二環路南段6號19信箱01分信箱(621000)
電話:17738406202
E-mail: d.sound@163.com
周 歡(1984-),女,博士,工程師,主要從事飛行動力學、導航制導與控制等方向研究。本文通信作者。
通信地址:四川綿陽919信箱411分箱(621900)
電話:(0816)2483263
E-mail: jocelynzhouhuan@163.com
Initial Self-Alignment Method for Inertial Platform on a Stationary Base
DING Zhi-jian1, ZHOU Huan2, ZHANG Shi-feng3, YANG Hua-bo3, CAI Hong3
(1. Air-breathing Hypersonic Research Center, China Aerodynamics Research and Development Center, Mianyang 621000, China;2. Institute of Systems Engineering, China Academy of Engineering Physics, Mianyang 621900, China;3. College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
A fast initial self-alignment method is proposed for a gimbal inertial platform system on a stationary base. Firstly, the coarse alignment is accomplished based on the fact that the gravity vector rotates around the Earth′s axis. Further, the platform is rotated along the vertical axis by torqueing command, and then the fine alignment is achieved using the Kalman filter technology and the coarse alignment results. Simulation cases illustrate that the proposed method can align the platform within 460 seconds, the estimated error of the horizontal angles is less than 5" (1σ), and the azimuth angle is less than 13" (1σ). These results show that the proposed approach can significantly improve the response speed and the navigation precision of the system.
Inertial platform; Initial self-calibration; Kalman filter; Stationary base
2016-11-28;
2017-05-13
航天科技創新基金(CASC201105)
V448.12
A
1000-1328(2017)06-0612-09
10.3873/j.issn.1000-1328.2017.06.008
丁智堅(1988-),男,博士,助理研究員,主要從事慣性技術、飛行器設計等方向研究。
