乏燃料組件燃料棒更換裝置抓爪結(jié)構(gòu)的數(shù)值分析和試驗(yàn)研究
2017-07-07 11:57:58劉青松韓克平李文龍彭祥陽
核科學(xué)與工程 2017年3期
侯 碩,劉青松,余 冰,韓克平,李文龍,彭祥陽
(1.中廣核研究院有限公司 廣東深圳518124; 2.華中科技大學(xué)數(shù)字制造裝備與技術(shù)國家重點(diǎn)實(shí)驗(yàn)室 湖北武漢430074)
?
乏燃料組件燃料棒更換裝置抓爪結(jié)構(gòu)的數(shù)值分析和試驗(yàn)研究
侯 碩1,劉青松1,余 冰1,韓克平2,李文龍2,彭祥陽1
(1.中廣核研究院有限公司 廣東深圳518124; 2.華中科技大學(xué)數(shù)字制造裝備與技術(shù)國家重點(diǎn)實(shí)驗(yàn)室 湖北武漢430074)
燃料組件是核電站核反應(yīng)堆的關(guān)鍵設(shè)備之一,涉及燃料組件的維修特別是乏燃料組件破損棒更換維修屬于高風(fēng)險(xiǎn)作業(yè)。本文主要針對(duì)乏燃料組件燃料棒更換裝置的核心零件燃料棒抓爪的結(jié)構(gòu)進(jìn)行研究,通過結(jié)構(gòu)力學(xué)分析得到抓爪較優(yōu)壁厚數(shù)值,然后通過有限元計(jì)算抓爪的強(qiáng)度固化結(jié)構(gòu)參數(shù),最終進(jìn)行抓爪試制,并通過抓爪試驗(yàn)臺(tái)模擬抓爪的實(shí)際工況對(duì)抓爪進(jìn)行性能測定,確保抓爪滿足使用要求。
乏燃料組件;燃料棒;抓爪;數(shù)值分析;試驗(yàn)
燃料組件是核電站核反應(yīng)堆的關(guān)鍵設(shè)備之一,經(jīng)過多年的發(fā)展,壓水堆核電站燃料組件的制造質(zhì)量和運(yùn)行可靠性已經(jīng)達(dá)到了較高的水平,燃料組件破損概率很低,甚至許多堆芯燃料在個(gè)別循環(huán)周期內(nèi)實(shí)現(xiàn)了燃料零破損[1, 2]。但是,燃料破損仍是不可能完全避免的,燃料組件在運(yùn)行過程中還是會(huì)發(fā)生個(gè)別燃料棒泄漏或格架損壞現(xiàn)象。為了提高燃料組件利用率和核電站的經(jīng)濟(jì)性以及降低受損燃料組件貯存、后處理的難度,需要對(duì)受損組件進(jìn)行修復(fù),燃料棒彈性抓爪就是破損組件修復(fù)設(shè)備的關(guān)鍵零件[3]。燃料棒更換裝置抓爪能否按照預(yù)定設(shè)計(jì)順利打開和鎖緊并保證足夠的強(qiáng)度,將關(guān)系到換棒工作能否順利完成,并且由于抓爪所操作的燃料棒均為乏燃料組件棒,有的甚至為破損棒,因此需在屏蔽水下操作,屬于較高風(fēng)險(xiǎn)作業(yè),因此燃料棒抓爪的可靠性備受關(guān)注。
在燃料組件完整性的檢測和修復(fù)的研究中,李田[4]通過監(jiān)測燃料組件包殼的運(yùn)行狀況,及時(shí)發(fā)現(xiàn)、修復(fù)或更換了破損燃料組件;深秋平[5]介紹了反應(yīng)堆燃料組件修復(fù)裝置構(gòu)成以及檢修方法;Naohiro Nakamura[6]通過三維非線性有限元模型分析了土壤的結(jié)構(gòu)變化行為,通過對(duì)地基的運(yùn)動(dòng)等進(jìn)行評(píng)估,建立了更準(zhǔn)確的地震概率安全評(píng)價(jià)方法;譚忠文[7]以吊車組合結(jié)構(gòu)為例,給出核電站這類大型組合結(jié)構(gòu)的抗震分析方法;ZHANG Zheng-ming[8]結(jié)合理論分析動(dòng)態(tài)液體加載和結(jié)構(gòu)有限元分析方法,解決了液體存儲(chǔ)容器的抗震設(shè)計(jì);張鳳林[9]設(shè)計(jì)安裝了燃料組件破損檢查裝置,并進(jìn)行了校核模擬實(shí)驗(yàn)和正式檢查。本文主要針對(duì)燃料棒更換裝置中的抓爪進(jìn)行研究,通過結(jié)構(gòu)靜力學(xué)與有限元分析相結(jié)合的方法對(duì)抓爪結(jié)構(gòu)進(jìn)行了優(yōu)化。
1 設(shè)計(jì)輸入
1.1 抓爪典型的工作過程
抓棒過程示意如圖1所示。
工位一:芯桿接觸燃料棒頭部;
工位二:抓爪就位,此時(shí)抓頭位于燃料棒頸部位置;
工位三:鎖緊套筒向下,使抓爪向內(nèi)收縮,并保持抓爪對(duì)燃料棒頭部的有效夾持。
最后抓爪將燃料棒從燃料組件中抽出,反向操作即為插棒過程。

圖1 抓棒過程示意圖Fig.1 The process diagram of grabbing the rods
1.2 抓爪的形態(tài)要素
為了使抓爪可以完成以上工藝過程,抓爪一般設(shè)計(jì)成如圖2所示形態(tài)。根據(jù)其結(jié)構(gòu)功能特點(diǎn),其特征要素主要包括以下幾個(gè)方面:開瓣長度、數(shù)量、間隙(或瓣寬度)以及厚度。

圖2 抓爪結(jié)構(gòu)圖Fig.2 Structure of the gripper
1.3 設(shè)計(jì)要求
抓爪的設(shè)計(jì)需滿足其使用環(huán)境的接口要求、強(qiáng)度要求、彈性要求以及制造要求,具體如下:
1) 為了保證通過性要求,抓爪及鎖緊套筒任何部位不允許超過燃料棒的外部輪廓尺寸,并且要考慮抓棒過程的偏差適應(yīng)性。
2) 抓爪的開瓣數(shù)量一般為雙數(shù),同時(shí)不能太小,數(shù)量太小彈性較差,也不能太大,數(shù)量太大制造困難。
3) 爪瓣長度一般存在上限值,超過上限值后熱處理后會(huì)出現(xiàn)明顯的散瓣現(xiàn)象,尺寸精度穩(wěn)定性差。
4) 抓爪的正常工作載荷為50kg,要求具有5倍的安全系數(shù)。因此抓爪必須采用特種鋼,除耐弱酸腐蝕外,還應(yīng)具有較高的強(qiáng)度。
5) 爪瓣間隙的設(shè)定除了具有較好的力學(xué)性能外,還要考慮確保鎖緊套筒可以落下,同時(shí)考慮制造因素,因此爪瓣間隙應(yīng)該在一定數(shù)值的范圍內(nèi)。
2 結(jié)構(gòu)回彈特性的數(shù)值分析
為了研究燃料棒抓爪結(jié)構(gòu)對(duì)爪瓣回彈性能的影響,通過采用結(jié)構(gòu)靜力學(xué)進(jìn)行數(shù)學(xué)建模并對(duì)燃料棒抓爪結(jié)構(gòu)進(jìn)行定性分析,最后在MATLAB環(huán)境下對(duì)模型進(jìn)行求解與仿真計(jì)算,用理論方法得到抓爪結(jié)構(gòu)對(duì)其回彈性能的影響。
2.1 數(shù)學(xué)建模分析
將燃料棒單個(gè)抓爪簡化成懸臂梁模型,梁的長度為l、寬度為a、厚度為b。由于抓爪的彈性特性受到根部作用的影響,所以取懸臂梁根部截面三點(diǎn)A、A′、A″處的單元應(yīng)力進(jìn)行分析,如圖4所示,顯然A點(diǎn)為危險(xiǎn)點(diǎn)。根據(jù)結(jié)構(gòu)靜力學(xué)理論可以得到A點(diǎn)的應(yīng)力公式:
(1)

圖3 抓爪簡化結(jié)構(gòu)示意圖Fig.3 Schematic of the simplified structure of the gripper

圖4 應(yīng)力單元狀態(tài)示意圖Fig.4 Schematic of the stress state of the unit bod
在單元體上選取任一與σx成α角度的方向,該方向上的正應(yīng)力以拉為正、壓為負(fù);切應(yīng)力以繞單元體內(nèi)任一點(diǎn)有順時(shí)針旋轉(zhuǎn)的力矩為正,反之為負(fù)。設(shè)該方向上對(duì)應(yīng)的截面為dA,厚度設(shè)為單位1。則根據(jù)該方向和其法向的平衡方程和切應(yīng)力互等定理,可以整理為:
(2)
對(duì)于彈性抓爪,最大正應(yīng)力和切應(yīng)力應(yīng)分別小于許用正應(yīng)力σp和許用切應(yīng)力τp,又τp=(0.5~0.7)σp,故最大正應(yīng)力和切應(yīng)力應(yīng)該滿足
(3)

(4)

(5)
式中,F(xiàn)1為阻力;yb為壓縮量;l、a、b分別為爪瓣的長度、寬度和厚度。
分析上式可以得出:增大爪瓣的長度和寬度(即減小爪瓣間隙),抓爪的最大應(yīng)力將減小,從而有利于彈性抓爪的回彈性。
由于抓爪爪瓣厚度所處情況復(fù)雜,這里令σmax、b為變量,其余參數(shù)為定量,構(gòu)造函數(shù),通過MATLAB編程求解出σmax的最小值為:
(6)
對(duì)應(yīng)最優(yōu)彈性抓爪厚度b0為:
其中Δ值為:
(7)
2.2 仿真模擬分析
通過MATLAB建模分析,得到的仿真曲線如圖5所示。
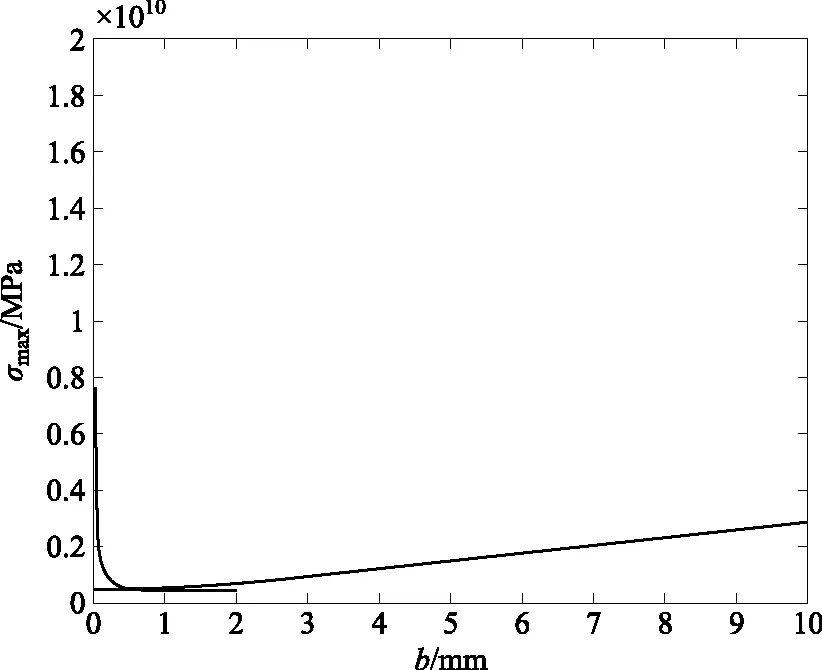
圖5 σmax與b曲線圖Fig.5 The curves of the σmax and b
得到的數(shù)值結(jié)果如下:
分析上式得出如下結(jié)論,抓爪爪瓣厚度的最優(yōu)數(shù)值為0.81mm,函數(shù)σmax以0.81為分界點(diǎn),左側(cè)為單調(diào)遞減函數(shù),右側(cè)為單調(diào)遞增函數(shù)。
3 抓爪參數(shù)固化和產(chǎn)品試制
通過SolidWorks建立抓爪優(yōu)化后的三維模型,并且使用單個(gè)爪瓣進(jìn)行等效分析,如圖6所示。針對(duì)固化參數(shù)的抓爪進(jìn)行5倍工作載荷的有限元分析,采用表1中的數(shù)據(jù)在ANSYS有限元軟件中進(jìn)行參數(shù)設(shè)置和網(wǎng)格劃分,最終的分析結(jié)果如圖7所示。

圖6 抓爪三維模型Fig.6 Three-dimensional model of the gripper

序號(hào)參數(shù)數(shù)值1材料632不銹鋼2彈性模量1.99×10113泊松比0.3054摩擦系數(shù)0.015單元類型四面體單元6燃料棒質(zhì)量50kg7安全系數(shù)5

圖7 抓頭位置應(yīng)力分布圖Fig.7 Stress distribution map of head position of the gripper
分析顯示,應(yīng)力集中位置位于抓頭輪廓變化區(qū)域,最大應(yīng)力值1460MPa,分布范圍較小。據(jù)此判斷,按照此設(shè)計(jì),抓爪在5倍工作載荷下不會(huì)發(fā)生斷裂現(xiàn)象。同時(shí),根據(jù)以上參數(shù)試制燃料棒抓爪如圖2所示。
4 試驗(yàn)驗(yàn)證
4.1 試驗(yàn)內(nèi)容
1) 模擬抓放燃料棒的實(shí)際工作過程對(duì)抓爪的功能進(jìn)行驗(yàn)證。
2) 極限(5倍工作載荷)載荷試驗(yàn)。
4.2 試驗(yàn)裝置
參考抓爪的工作過程對(duì)試驗(yàn)裝置進(jìn)行設(shè)計(jì),基本功能試驗(yàn)的功能原理如下(見圖8):
1) 試驗(yàn)臺(tái)具有微量水平和垂直調(diào)整的功能,用以滿足對(duì)中和偏差模擬的要求;
2) 氣缸1可使鎖緊套筒和抓爪模擬體向上(遠(yuǎn)離燃料棒或者帶著燃料棒上升)或者向下運(yùn)動(dòng)(靠近燃料棒或者帶著燃料棒下降);
3) 氣缸2可使鎖緊套筒模擬體向上(打開抓爪)或者向下(抓緊燃料棒)運(yùn)動(dòng);
4) 燃料棒模擬體設(shè)置有可調(diào)配重,滿足摩擦力模擬要求;
5) 試驗(yàn)裝置采用PLC控制,并且可以實(shí)現(xiàn)手動(dòng)和自動(dòng)功能。

圖8 基本功能試驗(yàn)裝置功能原理示意圖Fig.8 Schematic of function test device
極限載荷試驗(yàn)裝置較為簡單,限于篇幅,不再贅述,主要是通過套筒將抓爪鎖死,而后逐級(jí)增加砝碼的方式進(jìn)行驗(yàn)證。
4.3 試驗(yàn)結(jié)果
1) 經(jīng)過2000次抓爪的基本功能試驗(yàn),抓爪尺寸穩(wěn)定,抓爪頭部經(jīng)液體滲透檢驗(yàn),無裂紋。
2) 抓爪在5倍工作載荷下10分鐘內(nèi)未出現(xiàn)拉脫現(xiàn)象,抓爪頭部經(jīng)液體滲透檢驗(yàn),無裂紋。
5 結(jié)語
本文主要根據(jù)燃料棒更換的工藝過程對(duì)燃料棒抓爪進(jìn)行初步設(shè)計(jì),然后根據(jù)應(yīng)用軟件的數(shù)值仿真對(duì)抓爪的主要參數(shù)進(jìn)行優(yōu)化,最終試制抓爪并通過試驗(yàn)驗(yàn)證。結(jié)果表明,研制的抓爪滿足功能要求。
[1] 鄧浚獻(xiàn), 趙希卷, 葉曉麗, 等.壓水堆燃料的檢測, 修復(fù)和重組[J].原子核物理評(píng)論, 1999, 2.
[2] 劉玉璞, 劉浩杰.壓水堆核燃料破損探測系統(tǒng)研制[C]//全國第四屆核反應(yīng)堆用核儀器學(xué)術(shù)會(huì)議論文集.2005: 20-23.
[3] 許俊龍, 馬官兵, 王賢彬, 等.核反應(yīng)堆燃料組件的無損檢測和修復(fù)[J].無損檢測, 2014, 36(11): 38-41.[4] 李田, 張學(xué)糧, 謝杰, 等.壓水堆核電站燃料組件的破損及管理策略[J].全面腐蝕控制, 2015 (5): 80-83.[5] 沈秋平, 陳志清, 徐道平, 等.燃料組件修復(fù)裝置的設(shè)計(jì)[J].核技術(shù), 2010 (2): 148-151.
[6] Nakamura N,Akitab S,Suzukic T,et al.Study of ultimate seismic response and fragility evaluation of nuclear power building using nonlinear three-dimensional finite element model[J].Nuclear Engineering and Design,2010,240:166-180.
[7] 譚忠文, 王海濤, 何樹延.核電廠大型組合結(jié)構(gòu)的有限元抗震分析方法研究[J].核科學(xué)與工程, 2008, 28(2): 188-192.
[8] Zhang Z, He S, Li Z.Seismic analysis of liquid storage container in nuclear reactors[J].Nuclear Power Engineering, 2001, 22(4): 313-317.
[9] 張鳳林, 徐家駿, 陳永金, 等.反應(yīng)堆燃料組件破損檢查裝置[J].核科學(xué)與工程, 1982, 4: 013.
Numerical Analysis and Experimental Research on the Gripper Structure of the Replacement Device of the Spent Fuel Assemblies Fuel Rod
HOU Shuo1,LIU Qing-song1,YU Bing1,HAN Ke-ping2, LI Wen-long2,Peng Xiang-yang1
1.China Nuclear Power Technology Research Institute, Shenzhen of Guangdong Prov.518124, China; 2.State Key Laboratory of digital manufacturing equipment and technology, Huazhong University of Science and Technology, Wuhan of Hubei Prov.430074, China;
Fuel assembly is one of the key equipment in nuclear power plant, and it is a high-risk operation for the maintenance of the fuel assemblies, especially when the replacement of the damaged rod of the spent fuel assemblies occurred.In this paper, the gripper structure of the replacement device of the spent fuel assemblies fuel rod was studied, and the optimal wall thickness of the gripper is obtained by structure statics analysis.After the strength of the gripper was verified through the finite element analysis, and then eventually followed by the trial production of the gripper.Through simulating the actual working condition of the gripper, the performance of the gripper was measured to ensure the gripper meets the requirement.
Spent fuel assembly; Fuel rod; Gripper; Numerical analysis; Test
2017-03-11
化工裝備強(qiáng)化與本質(zhì)安全湖北省重點(diǎn)實(shí)驗(yàn)室開放課題(2015KA04),中央高校基本科研業(yè)務(wù)費(fèi)資助(HUST:2015QN051,2015TS063)
侯 碩(1982—),男,遼寧西豐縣人,高級(jí)工程師,現(xiàn)從事核電機(jī)械工程方面研究
TL2
A
0258-0918(2017)03-0477-05
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
