基于CAN總線汽車AFS從控系統的研究
2017-07-07 11:14:00陳玲玲未慶超南西
電子測試 2017年9期
陳玲玲,未慶超,南西
(安陽學院,河南安陽,455000)
基于CAN總線汽車AFS從控系統的研究
陳玲玲,未慶超,南西
(安陽學院,河南安陽,455000)
汽車前照燈的照明范圍是固定的,當汽車夜間轉彎、上坡或下坡時,汽車前照燈由于無法調節照明角度出現了盲區情況。基于CAN總線的智能前照燈隨動控制系統可以有效地提高行車安全。CAN總線從車身上采集CAN消息,通過ECU將采集到的信號進行計算,將計算的結果通過CAN總線收發器UJA1075ATW實現接收和發送。從控系統通過LIN總線接收Master的控制命令和反饋Slave的狀態信息。
AFS;從控系統;步進電機;LIN收發器
0 引言
汽車前照燈作為汽車的眼睛,與夜間開車的安全駕駛緊密聯系。然而,由于前照燈照明范圍固定,使汽車在夜間轉彎的照明范圍減小,無法準確的為駕駛者提供前方路段的景象信息,沒有充足時間對可能面對的危險做出反應。本文所研究的AFS——自適應前照明系統是一套能夠根據行駛路況和汽車行駛狀態的變化自動調整燈光的照明范圍的系統,目的是通過擴大駕駛員的視野來縮短駕駛員的反應時間。AFS系統能夠通過傳感器采集方向盤轉角以及車身的俯仰角度,然后通過電機自動調整前照燈的角度。在國外,AFS系統在汽車上已經得到廣泛應用,而在我國國內,該系統主要應用在高端汽車上,如奧迪A8,寶馬330i等,隨著智能前照燈控制技術的日趨成熟,應用范圍也從高端汽車走向一些中端汽車,使應用范圍不斷的擴大。
1 AFS系統原理
AFS系統最重要的功能就是彎道自適應照明,由Master系統和Slave系統兩部分組成,Slave控制器作為AFS系統的從控制部分,接收Master命令,在內部的LIN總線上作為從節點(分為左右兩個節點),反饋當前汽車的工作狀態信息,通過步進電機帶動前照燈實現自適應照明的要求。
2 Slave系統原理
Slave系統采用飛思卡爾芯片MC9S12ZVL單片機作為CPU,該芯片是專門為汽車電子應用設計的一款集成度較高的混合式MCU芯片,其中包含LIN收發器,電源轉換;步進電機采用兩片A3981驅動芯片實現電機驅動,與MCU之間采用SPI通信,SPI通過控制A3981讀取驅動狀態。slave主要負責和Master的LIN通訊,接收燈的運動命令驅動電機運動,并檢測電機故障和狀態反饋給Master,負責給旋轉電機位置傳感器供電和檢測位置信號,通過采集電壓換算成對應的角度,實現對位置的校準。Slave系統框圖如圖2所示。
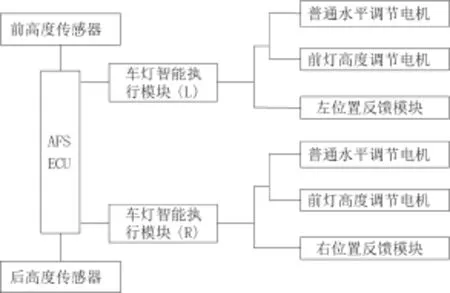
圖1 AFS系統原理圖
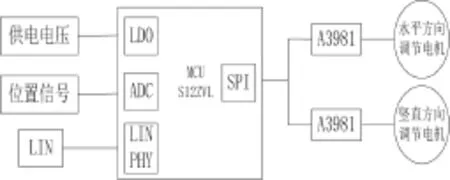
圖2 Slave系統框圖
2.1 MCU
Slave的MCU運算性能不需要很高,但可靠性和穩定性需要很高的要求,選擇Fresscale系列汽車級小資源MCU,其只接收Master的控制命令,驅動電機運動和反饋狀態信息等。單片機正常穩定工作還需要外圍電路:電源濾波,復位和振蕩器。其最小系統方案如圖3所示。
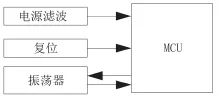
圖3 Slave MCU最小系統
2.2 位置傳感器信號采集
Slave需要采集旋轉電機的位置信息,用于檢測燈頭水平方向的角度,根據需要,位置傳感器為模擬型,電壓范圍在0.5V—4.5V,需要兩個模擬量采集電路,電路設計如圖4所示。
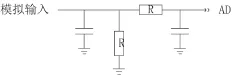
圖4 信號采集電路
2.3 步進電機驅動
根據實際需要,Slave需要負責驅動Swivel和Level兩個電機。根據實際的需要,電機選用雙線性四線制步進電機,電流小于1A,功率較小。所以電機驅動芯片可以選擇MSOFET全橋和診斷保護功能集成一體的驅動芯片A3981。電路設計框圖如圖5所示。
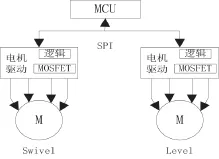
圖5 電機控制電路
2.4 LIN通訊
Slave通過LIN總線接收Master的控制命令和反饋Slave的狀態信息,最高速率20kbps。LIN硬件電路框圖如圖6所示。
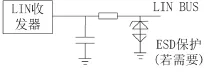
圖6 LIN通信電路
3 軟件設計
AFS系統的Slave系統軟件主要有Bootloader和Application兩大部分。Bootloader通過LIN總線下載更新應用程序,啟動加載程序;Application應用程序用來實現產品功能的。啟動流程如圖7所示。
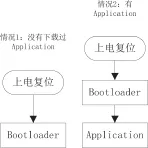
圖7 流程圖
如果下載過有效的Application(情況2),上電復位后,執行Bootloader軟件,然后跳轉到應用程序運行,否則(情況1),停留在Bootloader中等待下載任務。執行Application軟件后,首先進行硬件設備的初始化,軟件模塊的初始化,然后使能終端執行主循環的任務調度。水平調節方向的位置反饋單元可以反饋當前位置的模擬量,MCU通過ADC采集該電壓,換算成對應角度,可以實現對位置的校準,避免由于失步帶來的誤差。

圖8 主程序執行流程
4 試驗設計
在slave系統中,主要通過步進電機的控制來實現前照燈自適應轉動。根據步進電機的運轉原理,其驅動電路采用恒流載波控制,通過細分微步控制,降低震動,從而降低失步帶來的風險。根據步進電機矩頻特性曲線可知,需要采用加減速控制,采用勻加減速容易實現,且一般場合均可達到效果。
步進電機控制位置校準采用的轉角傳感器的模擬量輸出為0.5V~4.5V。起始點規定:位置反饋模塊的轉動軸逆時針轉至限位點時,記為0°;角度值規定:轉動軸繞模塊中心軸線旋轉的角度。特性輸出方程(電壓單位:mV)為步數和AD值的關系:步數=1.5*AD值-773,這是理論上的計算,實際值與理論值有一定的誤差,通過測量求得實際的關系為:步數=1.54*AD值-715。
[1]肖紅,王洪佩等.基于單片機控制的汽車自適應前照燈系統[J].制造業自動化,2011(8):125—129.
[2]黃仁忠.汽車自適應照明系統開發[D].大連:大連理工大學.2008(12).中國知網.
[3]林坦,戴廣超等.自適應前照燈系統(AFS)應用及發展趨勢[J].汽車節能,18—22.
Research on AFS slave system of car based on CAN bus
Chen Lingling,Wei Qingchao,Nan Xi
(Anyang College ,Anyang Henan,455000)
Automobile headlamps lighting range is fixed. The car is turning at night, uphill or downhill, automobile headlamps unable to adjust the lighting angle in the blind area. Based on CAN bus intelligent headlamps servo control system to improve road safetyeffectively. CAN bus collect CAN message from car body,the ECU calculate the collected signal and makes the result receive and sendvia CAN bus transceiver UJA1075ATW. Vice control system receive the Master Slave control commands and feedback status informationthrough the LIN bus .
AFS; slave system;Stepper motor;LIN transceiver
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
