四旋翼直升機(jī)的滑模控制研究
2017-07-08 03:14:31劉曉青羅劉敏李晉程全楊靜
現(xiàn)代電子技術(shù) 2017年13期
劉曉青+羅劉敏+李晉+程全+楊靜

摘 要: 四旋翼直升機(jī)因其優(yōu)良特性,在軍事和民用領(lǐng)域均有廣闊的應(yīng)用前景。為確保其安全穩(wěn)定飛行,針對周口師范學(xué)院自主研制的四旋翼直升機(jī),結(jié)合其結(jié)構(gòu)及動(dòng)力學(xué)原理,考慮非匹配不確定性因素的影響,對三自由度四旋翼直升機(jī)進(jìn)行建模。采用線性矩陣不等式技術(shù)進(jìn)行變結(jié)構(gòu)滑模控制系統(tǒng)設(shè)計(jì),仿真結(jié)果表明,該系統(tǒng)抗參變能力較強(qiáng),直升機(jī)的飛行姿態(tài)基本滿足控制要求。
關(guān)鍵詞: 滑模控制; 四旋翼直升機(jī); 建模; 線性矩陣不等式
中圖分類號: TN876?34; TP273 文獻(xiàn)標(biāo)識碼: A 文章編號: 1004?373X(2017)13?0106?04
Abstract: The quadrotor has broad application prospect in military and civil fields due to its excellent properties. In order to ensure its safe and stable flight, aiming at the quadrotor developed by Zhoukou Normal University independently, a quadrotor with three?degree of freedom is modeled in combination with its structure, dynamics principle, and effect of unmatched uncertainty factors. The linear matrix inequality technology is used to design the variable structure sliding?mode control system. The simulation result shows that the system has strong capability to resist the parameter variation, and the flight attitude of the quadrotor can satisfy the control requirements basically.
Keywords: sliding?mode control; quadrotor; modelling; linear matrix inequality
0 引 言
四旋翼直升機(jī)由于具有體積小,噪音小,可實(shí)現(xiàn)垂直起降與著陸、側(cè)飛、懸停、倒飛等飛行姿態(tài)[1],機(jī)動(dòng)靈活,便于操縱等優(yōu)點(diǎn),在軍事領(lǐng)域(如情報(bào)獲取、地面戰(zhàn)場監(jiān)察等)和民用領(lǐng)域(如航拍、重大災(zāi)害后的搜救、農(nóng)場信息采集[2]等)均有廣闊的應(yīng)用前景,如何保證其安全飛行便顯得尤為重要。
滑模變結(jié)構(gòu)控制可針對結(jié)構(gòu)不固定的系統(tǒng),根據(jù)當(dāng)前的系統(tǒng)狀態(tài)值調(diào)節(jié)系統(tǒng)結(jié)構(gòu),使系統(tǒng)狀態(tài)保持在滑動(dòng)模面上,并最終到達(dá)平衡點(diǎn)[3?4]。本文采用滑模變結(jié)構(gòu)控制研究四旋翼直升機(jī)飛行姿態(tài)控制問題,以保證其安全穩(wěn)定飛行。
1 四旋翼直升機(jī)的結(jié)構(gòu)原理及硬件配置
1.1 結(jié)構(gòu)原理
四旋翼直升機(jī)是旋翼式直升機(jī)的一種,它是由4輸入作用力產(chǎn)生6個(gè)自由度的一種欠驅(qū)動(dòng)系統(tǒng)[5]。與固定翼飛行器相比,旋翼式直升機(jī)可實(shí)現(xiàn)垂直起降與著陸、側(cè)飛、懸停、倒飛等飛行姿態(tài)[6],環(huán)境適應(yīng)能力強(qiáng);與常規(guī)旋翼式直升機(jī)比較,四旋翼直升機(jī)螺旋槳的傾角固定,因其螺旋槳由彈性材料制作而成,可利用空氣阻力調(diào)整螺旋槳以改變其傾角。
周口師范學(xué)院自主研制的四旋翼直升機(jī)由主體構(gòu)架、基座和螺旋槳構(gòu)成,其結(jié)構(gòu)如圖1所示。4個(gè)螺旋槳以十字交叉形式安裝于樞軸支架頂端[7],其中Rotor1為前螺旋槳,Rotor3為后螺旋槳,Rotor2為右螺旋槳,Rotor4為左螺旋槳。Rotor1和Rotor3為前后一組,順時(shí)針轉(zhuǎn)動(dòng);Rotor2和Rotor4為左右一組,逆時(shí)針轉(zhuǎn)動(dòng)。當(dāng)兩組螺旋槳速度相等時(shí),速度的合成效應(yīng)形成升力,若其合成升力等于直升機(jī)重力,則直升機(jī)處于懸停狀態(tài);若升力總和大于直升機(jī)重力,則直升機(jī)上升;若升力總和小于直升機(jī)重力,則直升機(jī)下降。當(dāng)兩組螺旋槳的速度不等時(shí),速度的差異效應(yīng)形成旋轉(zhuǎn)力矩,產(chǎn)生偏航角,則機(jī)體順時(shí)針或逆時(shí)針旋轉(zhuǎn)[8]。當(dāng)其中一個(gè)螺旋槳的速度與其他三個(gè)不同,則會(huì)導(dǎo)致耦合運(yùn)動(dòng),例如,減小Rotor2速度,保持其他三個(gè)速度不變,則左右升力不平衡,直升機(jī)將向右滾動(dòng);同時(shí),左右一組和前后一組的力矩不平衡,直升機(jī)將向右偏航;滾動(dòng)又會(huì)使直升機(jī)向右平移。
1.2 硬件配置
動(dòng)力設(shè)備采用通用動(dòng)力模塊UPM2405和直流無刷電動(dòng)機(jī);傳感器選用Freescale 公司的加速度計(jì)MMA7260,兩軸磁阻傳感器集中到單個(gè)芯片上的 HMC1052,Murata公司的角速度傳感器 ENC?03M;數(shù)據(jù)采集選用Quanser公司的Q4?PCI控制卡,直接插入PCI卡槽即可實(shí)現(xiàn)數(shù)字量與模擬量之間的轉(zhuǎn)換,處理編碼信號和電壓信號。
2 具有非匹配不確定性的三自由度四旋翼直升
機(jī)的建模
2.1 動(dòng)力學(xué)模型
本文主要研究三自由度四旋翼直升機(jī)的飛行姿態(tài)控制問題。忽略軸承間的相互摩擦、氣流對螺旋槳的擾動(dòng)、陀螺效應(yīng)等因素,四旋翼所受作用力如圖2所示。記驅(qū)動(dòng)前螺旋槳電機(jī)的電壓為驅(qū)動(dòng)后螺旋槳電機(jī)的電壓為驅(qū)動(dòng)左螺旋槳電機(jī)的電壓為驅(qū)動(dòng)右螺旋槳電機(jī)的電壓為
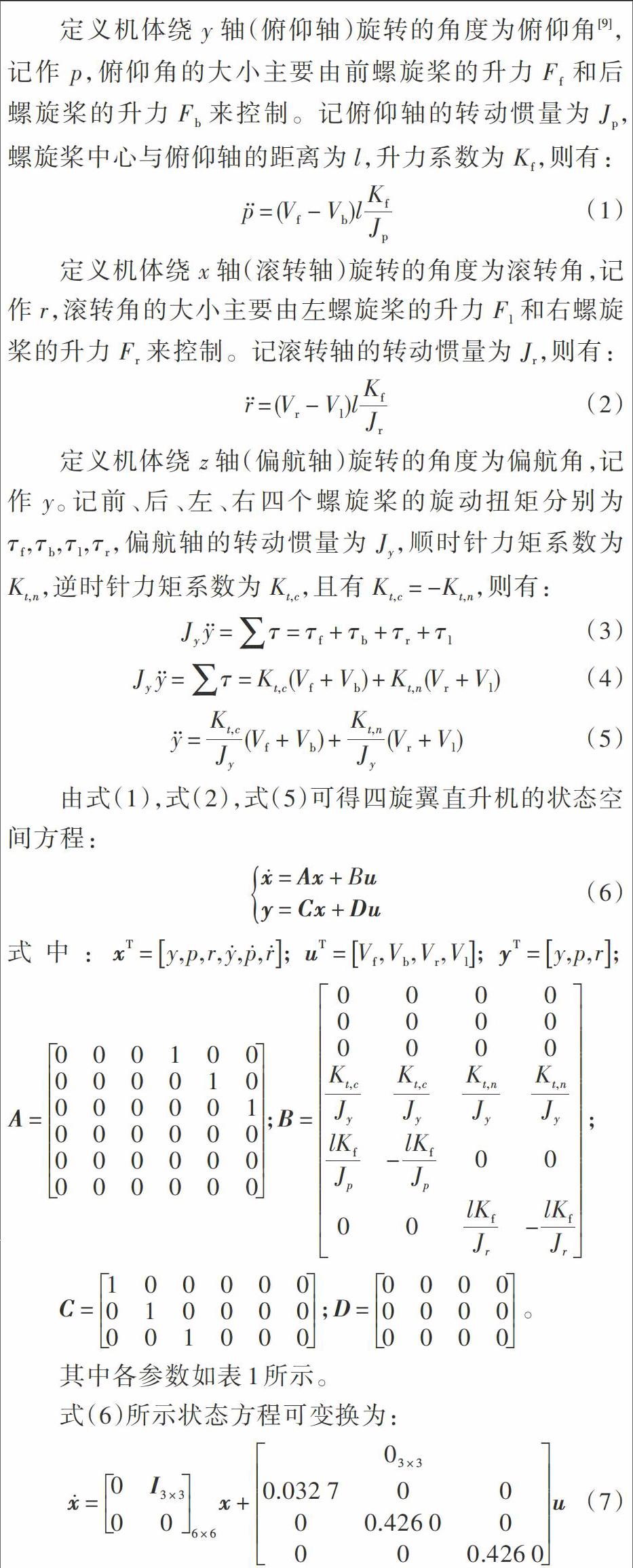
定義機(jī)體繞軸(俯仰軸)旋轉(zhuǎn)的角度為俯仰角[9],記作俯仰角的大小主要由前螺旋槳的升力和后螺旋槳的升力來控制。記俯仰軸的轉(zhuǎn)動(dòng)慣量為螺旋槳中心與俯仰軸的距離為升力系數(shù)為則有:
定義機(jī)體繞軸(滾轉(zhuǎn)軸)旋轉(zhuǎn)的角度為滾轉(zhuǎn)角,記作滾轉(zhuǎn)角的大小主要由左螺旋槳的升力和右螺旋槳的升力來控制。記滾轉(zhuǎn)軸的轉(zhuǎn)動(dòng)慣量為則有:
定義機(jī)體繞軸(偏航軸)旋轉(zhuǎn)的角度為偏航角,記作記前、后、左、右四個(gè)螺旋槳的旋動(dòng)扭矩分別為偏航軸的轉(zhuǎn)動(dòng)慣量為順時(shí)針力矩系數(shù)為逆時(shí)針力矩系數(shù)為且有則有:
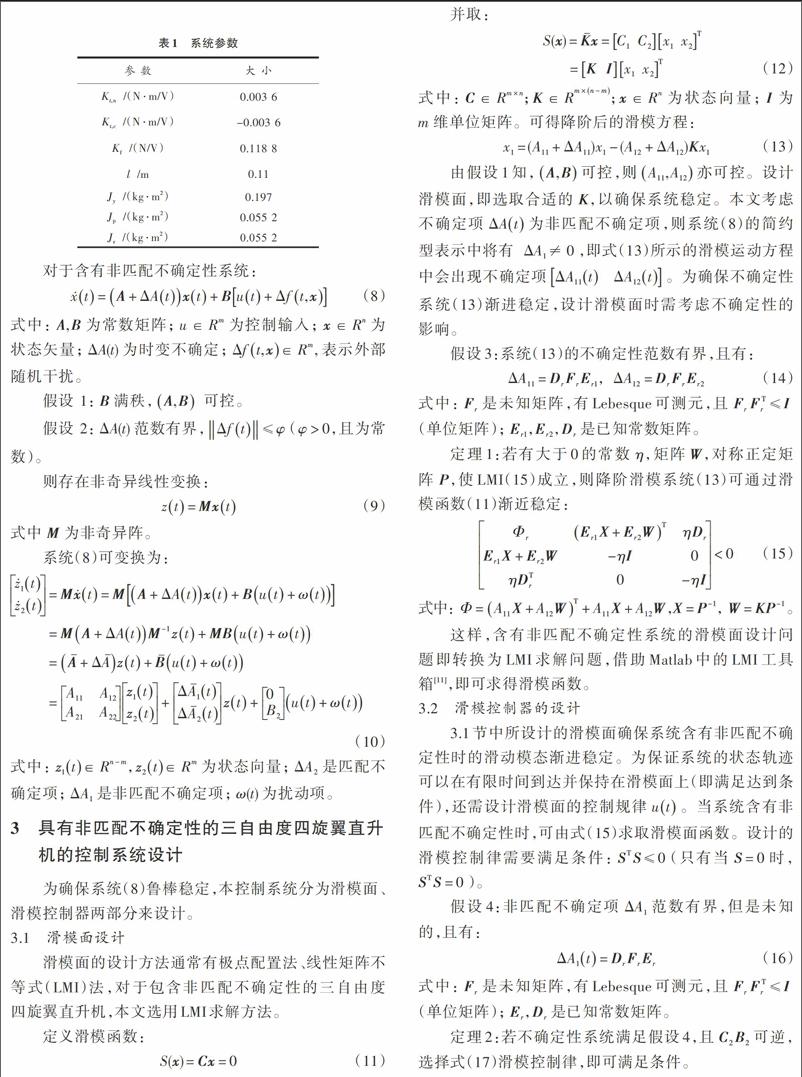
其中各參數(shù)如表1所示。
式(6)所示狀態(tài)方程可變換為:
2.2 非匹配不確定性問題描述
四旋翼飛行系統(tǒng)中存在不同程度的不確定性,包括滿足匹配條件的不確定性(匹配不確定性)和不滿足匹配條件的不確定性(非匹配不確定性)兩大部分。傳統(tǒng)的變結(jié)構(gòu)控制主要考慮系統(tǒng)中的匹配不確定性[10],本文則主要考慮非匹配不確定性。
對于含有非匹配不確定性系統(tǒng):
式中:為常數(shù)矩陣;為控制輸入;為狀態(tài)矢量;為時(shí)變不確定;表示外部隨機(jī)干擾。
假設(shè) 1:滿秩, 可控。
假設(shè) 2:范數(shù)有界,(且為常數(shù))。
則存在非奇異線性變換:
式中為非奇異陣。
系統(tǒng)(8)可變換為:
式中:為狀態(tài)向量;是匹配不確定項(xiàng);是非匹配不確定項(xiàng);為擾動(dòng)項(xiàng)。
3 具有非匹配不確定性的三自由度四旋翼直升
機(jī)的控制系統(tǒng)設(shè)計(jì)
為確保系統(tǒng)(8)魯棒穩(wěn)定,本控制系統(tǒng)分為滑模面、滑模控制器兩部分來設(shè)計(jì)。
3.1 滑模面設(shè)計(jì)
滑模面的設(shè)計(jì)方法通常有極點(diǎn)配置法、線性矩陣不等式(LMI)法,對于包含非匹配不確定性的三自由度四旋翼直升機(jī),本文選用LMI求解方法。
定義滑模函數(shù):
并取:
式中:為狀態(tài)向量;為維單位矩陣。可得降階后的滑模方程:
由假設(shè)1知,可控,則亦可控。設(shè)計(jì)滑模面,即選取合適的以確保系統(tǒng)穩(wěn)定。本文考慮不確定項(xiàng)為非匹配不確定項(xiàng),則系統(tǒng)(8)的簡約型表示中將有 ,即式(13)所示的滑模運(yùn)動(dòng)方程中會(huì)出現(xiàn)不確定項(xiàng)。為確保不確定性系統(tǒng)(13)漸進(jìn)穩(wěn)定,設(shè)計(jì)滑模面時(shí)需考慮不確定性的影響。
假設(shè)3:系統(tǒng)(13)的不確定性范數(shù)有界,且有:
式中:是未知矩陣,有Lebesque可測元,且 (單位矩陣);是已知常數(shù)矩陣。
定理1:若有大于0的常數(shù)矩陣對稱正定矩陣使LMI(15)成立,則降階滑模系統(tǒng)(13)可通過滑模函數(shù)(11)漸近穩(wěn)定:
這樣,含有非匹配不確定性系統(tǒng)的滑模面設(shè)計(jì)問題即轉(zhuǎn)換為LMI求解問題,借助Matlab中的LMI工具箱[11],即可求得滑模函數(shù)。
3.2 滑模控制器的設(shè)計(jì)
3.1節(jié)中所設(shè)計(jì)的滑模面確保系統(tǒng)含有非匹配不確定性時(shí)的滑動(dòng)模態(tài)漸進(jìn)穩(wěn)定。為保證系統(tǒng)的狀態(tài)軌跡可以在有限時(shí)間到達(dá)并保持在滑模面上(即滿足達(dá)到條件),還需設(shè)計(jì)滑模面的控制規(guī)律。當(dāng)系統(tǒng)含有非匹配不確定性時(shí),可由式(15)求取滑模面函數(shù)。設(shè)計(jì)的滑模控制律需要滿足條件:(只有當(dāng)時(shí),)。
假設(shè)4:非匹配不確定項(xiàng)范數(shù)有界,但是未知的,且有:
式中:是未知矩陣,有Lebesque可測元,且 (單位矩陣);是已知常數(shù)矩陣。
定理2:若不確定性系統(tǒng)滿足假設(shè)4,且可逆,選擇式(17)滑模控制律,即可滿足條件。
式中:為對角陣(對角元素均為大于0的實(shí)數(shù)):
4 系統(tǒng)仿真
對以上設(shè)計(jì)進(jìn)行仿真,結(jié)果如圖3~圖5所示。
由仿真結(jié)果可以看出,系統(tǒng)狀態(tài)響應(yīng)幾乎不受非匹配不確定性參數(shù)攝變的影響,系統(tǒng)抗參變能力較強(qiáng),證明采用LMI技術(shù)所設(shè)計(jì)的滑動(dòng)模態(tài)變結(jié)構(gòu)控制器抑制非匹配不確定性影響的效果較好。
5 結(jié) 語
本文針對周口師范學(xué)院自主開發(fā)的四旋翼直升機(jī),考慮三自由度非匹配不確定性系統(tǒng),采用LMI技術(shù)設(shè)計(jì)了魯棒滑模面和滑模控制器,仿真結(jié)果證明了該方法的可行性和有效性。
參考文獻(xiàn)
[1] 宿敬亞,張瑞峰,王新華,等.基于濾噪微分器的四旋翼飛行器控制[J].控制理論與應(yīng)用,2009,26(8):827?832.
[2] 扈菲菲,姬江濤,賀智濤,等.農(nóng)田環(huán)境四旋翼UAV信息采集系統(tǒng)的設(shè)計(jì)與試驗(yàn)[J].河南科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2013,34(6):71?74.
[3] 安凱,王飛飛.一種單連桿機(jī)械臂柔性關(guān)節(jié)的滑模變結(jié)構(gòu)控制[J].現(xiàn)代電子技術(shù),2016,39(2):4?8.
[4] 第五鵬杰,楊樹興.四旋翼飛行器全局動(dòng)態(tài)魯棒性跟蹤控制[J].北京理工大學(xué)學(xué)報(bào),2013,33(5):505?509.
[5] 劉志軍,呂強(qiáng),王東來.小型四旋翼直升機(jī)的建模與仿真控制[J].計(jì)算機(jī)仿真,2010,27(7):18?20.
[6] 于雅莉,孫楓,王元昔.基于多傳感器的四旋翼飛行器硬件電路設(shè)計(jì)[J].傳感器與微系統(tǒng),2011,30(8):113?115.
[7] 尤元,李聞先.四旋翼無人機(jī)設(shè)計(jì)與滑模控制仿真[J].現(xiàn)代電子技術(shù),2015,38(15):80?83.
[8] 李運(yùn)堂,賈宇寧,王鵬峰,等.基于多傳感器的四旋翼飛行器硬件系統(tǒng)設(shè)計(jì)[J].傳感器與微系統(tǒng),2015,34(2):119?121.
[9] 李俊,李運(yùn)堂.四旋翼飛行器的動(dòng)力學(xué)建模及PID控制[J].遼寧工程技術(shù)大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,31(1):114?117.
[10] 胡劍波,褚健.一類非匹配不確定性系統(tǒng)的變結(jié)構(gòu)控制[J].控制理論與應(yīng)用,2002,19(1):105?108.
[11] 薛定宇.控制系統(tǒng)計(jì)算機(jī)輔助設(shè)計(jì):Matlab語言與應(yīng)用[M].3版.北京:清華大學(xué)出版社,2012.
