基于小型PLC的有軌小車尋線高精度控制數(shù)學(xué)模型設(shè)計(jì)
2017-07-08 03:54:00劉明明劉志紅
現(xiàn)代電子技術(shù) 2017年13期
劉明明+劉志紅
摘 要: 提出以激光循跡小型PLC為基礎(chǔ)的有軌小車運(yùn)輸方式提升效率,并對有軌小車實(shí)現(xiàn)高精度控制設(shè)計(jì)。利用激光發(fā)射器射出的光線對不同物體呈現(xiàn)不同顏色的特點(diǎn),將收集的高低電平導(dǎo)入PLC系統(tǒng)中,對高低電平開關(guān)量編碼,建立包括步進(jìn)電動機(jī)模型、傳動機(jī)構(gòu)模型和小車轉(zhuǎn)向系統(tǒng)閉環(huán)狀態(tài)空間模型的小車尋線模型,并建立以PLC系統(tǒng)為基礎(chǔ)結(jié)合PID控制器完成GPC?PID控制系統(tǒng),利用該系統(tǒng)及時調(diào)控小車動態(tài)過程,根據(jù)動態(tài)性能變化完成控制器參數(shù)的重新調(diào)整與設(shè)定,通過GPC算法調(diào)整該系統(tǒng)目標(biāo)函數(shù)的增量,確保小型PLC有軌小車尋線軌跡的精確度。實(shí)驗(yàn)證明,利用該方法可有效地確保基于小型PLC有軌小車尋線的精度。
關(guān)鍵詞: 激光循跡; 有軌小車; 尋線; 高精度控制; 數(shù)學(xué)模型
中圖分類號: TN911.1?34; TP391 文獻(xiàn)標(biāo)識碼: A 文章編號: 1004?373X(2017)13?0144?04
Abstract: The rail guided vehicle transport mode based on laser tracking small PLC is put forward to improve its transport efficiency. The high?precision control design of the rail guided car is realized. By means of the characteristics that the laser rays send by laser generation appear different colors for different objects, the collected high?low level is input into the PLC system, and its switching value is coded. The stepping motor model, transmission mechanism model and vehicle line tracking model of the closed?loop vehicle steering system space state model were established. The GPC?PID control system combined PLC system with PID controller was established to control the vehicle dynamic process timely. The controller parameters are readjusted and set according to the change of dynamic performance. The increment of the system objective function is adjusted by means of GPC algorithm to ensure the accuracy of the rail guided vehicle line tracking based on small PLC. The experimental results show that the designed method can ensure the precision of the rail guided vehicle line tracking based on small PLC effectively.
Keywords: laser tracking; rail guided vehicle; line tracking; high?precision control; mathematical model
0 引 言
文獻(xiàn)[1]中提到在經(jīng)濟(jì)迅猛發(fā)展的今天,我國工業(yè)化水平也獲得了極大提升,同時也存在一些制約發(fā)展的因素顯現(xiàn)出來。對于企業(yè)而言,日趨復(fù)雜的工藝、產(chǎn)量激增導(dǎo)致倉儲成本上升以及人口老齡化引起的人力成本提高等眾多因素影響,都迫使企業(yè)不斷提升生產(chǎn)過程中的自動化水平和勞動生產(chǎn)率[2?3]。作為協(xié)調(diào)生產(chǎn)的重要環(huán)節(jié),文獻(xiàn)[4]提到工廠運(yùn)輸效率對生產(chǎn)成本以及生產(chǎn)效率的提高有直接影響。因傳統(tǒng)物流模式已不能適應(yīng)現(xiàn)今各行業(yè)的生產(chǎn)與發(fā)展,所以需要用一種新的全方位、全自動化的物流系統(tǒng)來替代傳統(tǒng)物流運(yùn)輸系統(tǒng)[5?7]。
文獻(xiàn)[8]指出空間運(yùn)輸和地面運(yùn)輸是目前生產(chǎn)過程中最常用的物料運(yùn)輸方式。在空中利用如電動絞車等起重設(shè)備,吊起物料并按既定路線運(yùn)輸?shù)街付ㄎ恢茫缓蠓畔挛锪希朔N方式就是空間運(yùn)輸。地面運(yùn)輸是指通過叉車等運(yùn)輸工具運(yùn)送物料。對于現(xiàn)代企業(yè)來說,以上兩種運(yùn)輸方式都存在許多弊端,比如空間運(yùn)輸效率低、操作不便且投資較大,而地面運(yùn)輸費(fèi)時費(fèi)力且人力成本越來越高,安全程度較低。
本文提出以激光循跡小型PLC為基礎(chǔ)的有軌小車提高運(yùn)輸效率,并且實(shí)現(xiàn)有軌小車高精度控制設(shè)計(jì)。通過GPC算法控制該系統(tǒng)目標(biāo)函數(shù)的增量,保證小型PLC有軌小車尋線軌跡精確度[9]。
1 基于小型PLC的有軌小車控制系統(tǒng)總體設(shè)計(jì)
1.1 構(gòu)建有軌小車尋線軌跡系統(tǒng)模型
作為一種數(shù)字運(yùn)算操控的電子系統(tǒng),可編程控制器的設(shè)計(jì)與應(yīng)用對工業(yè)發(fā)展貢獻(xiàn)巨大。可編程存儲器被應(yīng)用于內(nèi)部存儲,進(jìn)行順序控制、邏輯運(yùn)算、定時計(jì)算等操作,再利用模擬式、數(shù)字式輸入與輸出操控各種類型機(jī)械。構(gòu)建基于PLC控制有軌小車動力系統(tǒng)的數(shù)學(xué)模型,有助于更加深入地分析該系統(tǒng)的動態(tài)軌跡以及預(yù)測控制系統(tǒng)性能,通過現(xiàn)代控制理論的狀態(tài)空間模型可以更準(zhǔn)確地描述系統(tǒng)。
1.1.1 步進(jìn)電機(jī)模型
步進(jìn)電機(jī)是一種利用電脈沖信號轉(zhuǎn)換成角度的執(zhí)行元件,脈沖信號的數(shù)量、相序和頻率決定了轉(zhuǎn)動角度、轉(zhuǎn)動方向以及轉(zhuǎn)速。整個有軌小車轉(zhuǎn)向系統(tǒng)的快速性及準(zhǔn)確性與步進(jìn)電機(jī)動態(tài)特性好壞息息相關(guān)。此動態(tài)過程由步進(jìn)電機(jī)接收到脈沖信號開始到脈沖信號停止,隨著時間變化,步進(jìn)電機(jī)輸出量也隨之改變。在忽略失調(diào)角度產(chǎn)生的阻力矩時,步進(jìn)電機(jī)動態(tài)平衡方程可描述為:
式中:為轉(zhuǎn)子轉(zhuǎn)動慣量;為阻尼系數(shù);為阻尼轉(zhuǎn)矩;為步進(jìn)電機(jī)轉(zhuǎn)動角度;為步進(jìn)電機(jī)系統(tǒng)運(yùn)轉(zhuǎn)時間。
設(shè)步進(jìn)電機(jī)輸入脈沖數(shù)量為實(shí)際輸出位移量為。設(shè)定其中為兩個方向的常量。將個脈沖相對應(yīng)理論角位移值當(dāng)作輸入量,以轉(zhuǎn)子實(shí)際角位移值為輸出量,代表失調(diào)角,則:
式中:為步進(jìn)電機(jī)最大凈轉(zhuǎn)矩;為失調(diào)角;為轉(zhuǎn)子齒數(shù),以電角度代表失調(diào)角并用表示。
將式(2)代入式(1)可得:
式中:代表方向上時刻實(shí)際輸出的位移變化量;表示實(shí)際輸出角位移量;代表實(shí)際輸出位移角總體變化量。
則步進(jìn)電機(jī)狀態(tài)空間方程可描述為:
1.1.2 傳動機(jī)構(gòu)模型
舵輪與傳動機(jī)構(gòu)間采取剛性連接,傳動裝置末端留有小孔,使舵輪支撐梁穿過其中,因此其傳動比值為11。設(shè)輸入到傳動機(jī)構(gòu)中的角位移為傳動裝置輸出角位移為令傳動裝置動力學(xué)方程可描述為:
式中:為傳動裝置轉(zhuǎn)動慣量;為傳動裝置阻尼系數(shù);為傳動裝置剛度系數(shù);傳動裝置輸出角位移變化量為。
整理式(5)可得:
式中:表示傳動裝置輸出角位移首次變化量;表示傳動裝置輸出角位移總體變化量;輸入到傳動裝置中的角位移由表示;傳動裝置方向的輸出角位移由表示。傳動機(jī)構(gòu)狀態(tài)空間方程為:
式中:傳動裝置輸出角位移量由表示。在系統(tǒng)改變角度的條件下,可以設(shè)置角位移傳感器的反饋量為單位負(fù)反饋,即輸出反饋矩陣是常數(shù)-1。
系統(tǒng)閉環(huán)空間表達(dá)式可在引入輸出反饋后描述為:
式中:代表單位反饋矩陣;代表系統(tǒng)反饋矩陣;代表系統(tǒng)輸出矩陣。根據(jù)以上各個單獨(dú)系統(tǒng)的設(shè)計(jì),對系統(tǒng)進(jìn)行串聯(lián)后與PLC控制系統(tǒng)實(shí)現(xiàn)連接,初步完成基于小型PLC的有軌小車系統(tǒng),為增強(qiáng)小車尋線軌跡的穩(wěn)定性,通過高精度控制方法對該系統(tǒng)實(shí)現(xiàn)進(jìn)一步調(diào)控。
1.2 基于PLC的小車尋線控制方法
由于GPC算法和PID控制算法在控制率方面具有相似性,因此整合GPC算法與PID控制算法能夠形成二者結(jié)合的高精度控制器。基于ARIMAX模型的GPC算法可描述為:
式中:表示輸出向量;表示輸入向量;表示零均值白噪聲序列;及階的多項(xiàng)式由及表示。
該模型可采用積分形式刪除余差,則定義目標(biāo)函數(shù)為:
式中:表示最大預(yù)測長度;表示控制長度,且目標(biāo)函數(shù)輸出、輸入向量分別由表示;代表GPC的參考軌跡;加權(quán)系數(shù)由表示,并設(shè)定為常數(shù)。
可對GPC的參考軌跡進(jìn)行描述,則:
式中:為系統(tǒng)輸出向量;為系統(tǒng)設(shè)定值;為柔化系數(shù)。目標(biāo)函數(shù)中末項(xiàng)能夠在控制增量過強(qiáng)時給予抑制,從而有效地防止系統(tǒng)超出受控范圍或發(fā)生震蕩。
GPC控制可總結(jié)為求解使目標(biāo)函數(shù)獲取最小值的最優(yōu)解問題。根據(jù)丟番圖方程,在不計(jì)未來時刻噪聲的條件下,對時間之后步的預(yù)測可描述為:
式中:為預(yù)測輸出向量;為單位階躍響應(yīng)采用值;表示丟番圖方程的多項(xiàng)式;系統(tǒng)經(jīng)過時間之后步的輸出變量由表示;系統(tǒng)輸入的變化向量由表示。
利用輸入與輸出數(shù)據(jù)總量代替丟番圖方程的多項(xiàng)式,則實(shí)際控制中的輸入分量為:
式中:單位階躍響應(yīng)采用值中的第一行值由表示;系統(tǒng)參考軌跡由表示;經(jīng)過時間后輸入變量由表示。
根據(jù)PID控制策略的基礎(chǔ)性能,PID控制率可以描述為:
式中:為PID控制器的單位階躍響應(yīng)值;為比例系數(shù);為積分時間常數(shù);為微分時間常數(shù);為控制器調(diào)控時間。由于該控制器對控制對象的特性變化反應(yīng)較慢,所以需要將GPC算法與PID控制器相結(jié)合。在控制系統(tǒng)中常采用增量式PID,則該控制算法可描述為:
式中:為PID控制器調(diào)控參數(shù);為系統(tǒng)設(shè)定輸入與實(shí)際輸出的差值;為控制器輸出;為采樣時間;為差分算子。
為方便推導(dǎo)及計(jì)算,令,則式(15)可變化為:
式中:為比例系數(shù)算子。因?yàn)镚PC算法與PID算法在控制率方面具有相似性,則可對二者進(jìn)行整合,獲取GPC二次型性能指標(biāo)最小化公式:
式中:為靜態(tài)增益項(xiàng)。通過將GPC算法與PID算法結(jié)合得出系統(tǒng)調(diào)控輸出向量,使有軌小車在尋線過程中按照上述參數(shù)調(diào)整后獲得穩(wěn)定輸出。
2 仿真實(shí)驗(yàn)及結(jié)果分析
為有效完成基于PLC有軌小車的尋線過程,需對小車尋線過程中動態(tài)性能的不穩(wěn)定運(yùn)用文中GPC?PID控制系統(tǒng)進(jìn)行調(diào)控,以保證整個PLC小車控制系統(tǒng)的整體穩(wěn)定性。
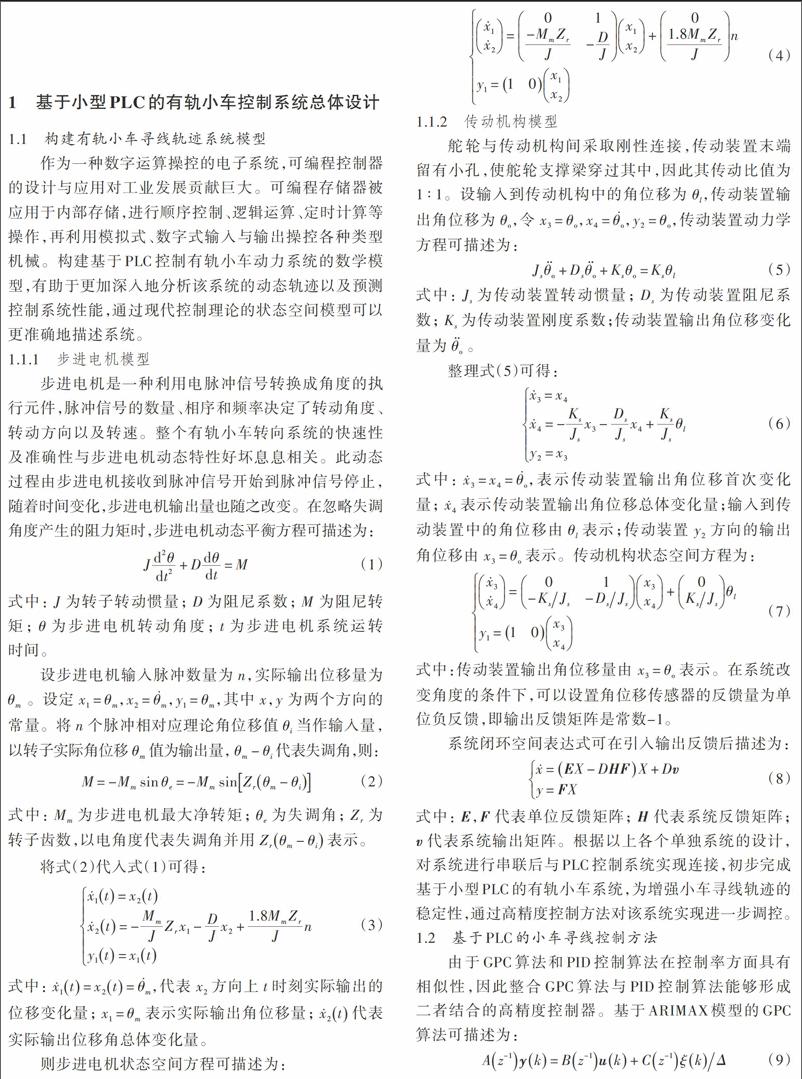
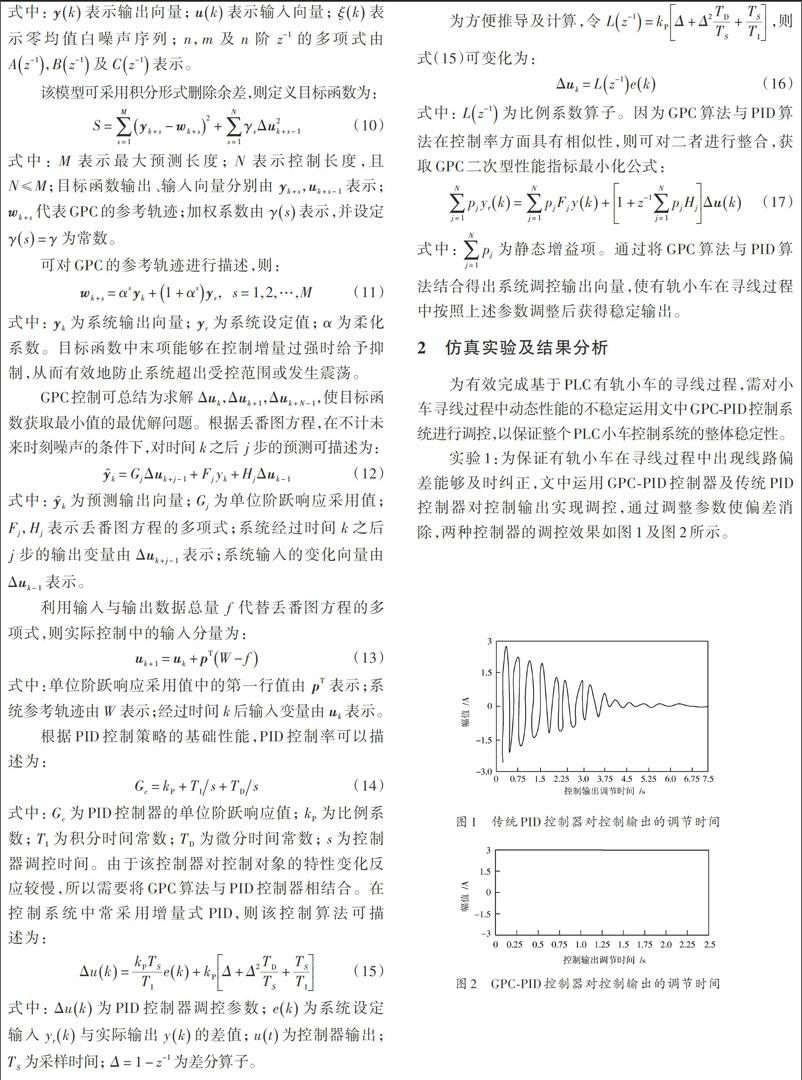
實(shí)驗(yàn)1:為保證有軌小車在尋線過程中出現(xiàn)線路偏差能夠及時糾正,文中運(yùn)用GPC?PID控制器及傳統(tǒng)PID控制器對控制輸出實(shí)現(xiàn)調(diào)控,通過調(diào)整參數(shù)使偏差消除,兩種控制器的調(diào)控效果如圖1及圖2所示。
通過圖1,圖2可以看出,當(dāng)有軌小車軌跡出現(xiàn)偏差時,利用文中GPC?PID控制器及PID控制器分別對偏差軌跡進(jìn)行參數(shù)調(diào)整,由于文中GPC?PID控制器分別對比例項(xiàng)增益系數(shù)及積分系數(shù)同時進(jìn)行調(diào)控,在對比例系數(shù)進(jìn)行控制時,可確保有軌小車偏差軌跡恢復(fù)到原位,防止比例系數(shù)調(diào)控過大造成震動,同時對積分系數(shù)進(jìn)行調(diào)控,保證位置回歸準(zhǔn)確的情況下,確保有軌小車的穩(wěn)定性能。傳統(tǒng)PID控制器只單方面從比例增益系數(shù)調(diào)節(jié)有軌小車尋線輸出系統(tǒng),在調(diào)節(jié)系數(shù)增大的情況下會造成綜合系統(tǒng)的震動及不穩(wěn)定,使小車尋線軌跡偏離方向,產(chǎn)生嚴(yán)重誤差,不能達(dá)到預(yù)期效果。比較兩種控制器,文中GPC?PID控制器的控制輸出效果較為穩(wěn)定。
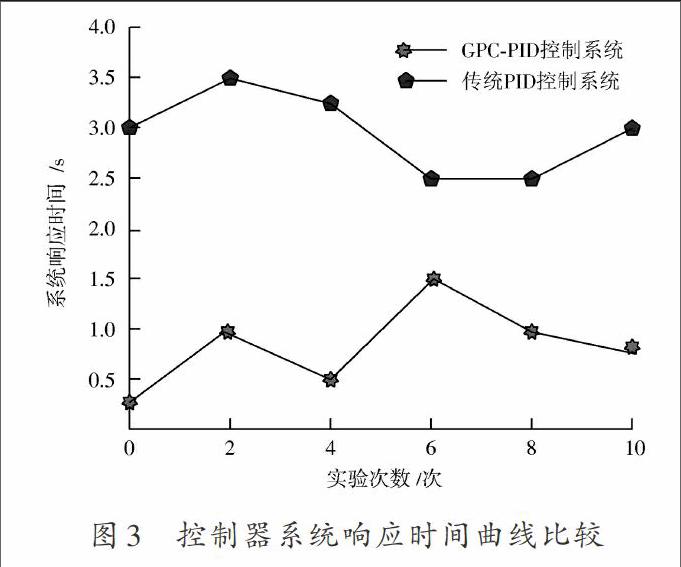
實(shí)驗(yàn)2:將GPC?PID控制及丟番圖方程計(jì)算求解運(yùn)用計(jì)算機(jī)進(jìn)行Matlab編程,并設(shè)定系統(tǒng)輸出值為2,觀察文中GPC?PID控制器及傳統(tǒng)PID控制器輸出設(shè)定值的系統(tǒng)響應(yīng)時間,通過圖3系統(tǒng)響應(yīng)時間曲線圖比較兩種控制器的差異性。
在輸出設(shè)定值一定的情況下,通過10次仿真實(shí)驗(yàn)比較GPC?PID控制器輸出設(shè)定值系統(tǒng)響應(yīng)時間與傳統(tǒng)PID控制器輸出設(shè)定值系統(tǒng)響應(yīng)時間可以看出,文中GPC?PID控制器的系統(tǒng)響應(yīng)時間明顯較傳統(tǒng)PID系統(tǒng)響應(yīng)時間短,說明本文基于PLC的GPC?PID控制系統(tǒng)靈敏度及穩(wěn)定性能都非常良好。
3 結(jié) 論
為提高工業(yè)生產(chǎn)線運(yùn)輸材料的效率,本文提出基于小型PLC對有軌小車尋線軌跡進(jìn)行高精度數(shù)學(xué)模型。實(shí)驗(yàn)仿真結(jié)果表明,本文設(shè)計(jì)方法可以有效地確保有軌小車尋線軌跡的精確性和穩(wěn)定性。
參考文獻(xiàn)
[1] 袁大海,陳英葵.構(gòu)建與創(chuàng)新:中國新型工業(yè)化水平評價模型運(yùn)用述評與展望[J].工業(yè)經(jīng)濟(jì)論壇,2016,3(5):485?493.
[2] 劉偉,蔡志洲.我國工業(yè)化進(jìn)程中產(chǎn)業(yè)結(jié)構(gòu)升級與新常態(tài)下的經(jīng)濟(jì)增長[J].北京大學(xué)學(xué)報(bào)(哲學(xué)社會科學(xué)版),2015,52(3):5?19.
[3] 葛立波.推進(jìn)流程再造管理,提升企業(yè)生產(chǎn)效率[J].價值工程,2015,34(8):223?224.
[4] 許振騰,李艷軍,曹愈遠(yuǎn),等.基于PLC的雙余度海底管道開孔機(jī)遠(yuǎn)程電氣控制系統(tǒng)設(shè)計(jì)[J].科學(xué)技術(shù)與工程,2015,15(20):244?248.
[5] 邱盛成,蔡啟仲,李克儉,等.PLC梯形圖轉(zhuǎn)化為多操作數(shù)邏輯指令的設(shè)計(jì)與實(shí)現(xiàn)[J].計(jì)算機(jī)測量與控制,2016,24(6):202?205.
[6] 陳榮雄.物聯(lián)網(wǎng)技術(shù)在倉儲物流領(lǐng)域應(yīng)用分析與展望[J].信息與電腦(理論版),2015,25(14):52?53.
[7] 李金夫,庹先國,劉勇,等.關(guān)于整車物流運(yùn)輸車輛路徑優(yōu)化設(shè)計(jì)的研究[J].計(jì)算機(jī)仿真,2016,33(4):184?188.
[8] 周迎,胡大斌,金如峰,等.基于PLC的模糊控制在船舶舵減搖系統(tǒng)的應(yīng)用[J].現(xiàn)代電子技術(shù),2016,39(2):140?142.
[9] 安愛民,王靜,張浩琛,等.基于廣義預(yù)測控制策略的微生物燃料電池控制[J].化工學(xué)報(bào),2016,67(3):1048?1054.
