對數螺旋錐齒輪有限元接觸分析前處理
2017-07-08 04:19:19李強常云龍蔣建鋒王麗婷
現代電子技術 2017年13期
李強+常云龍+蔣建鋒+王麗婷

摘 要: 對數螺旋錐齒輪動態接觸分析的必要前提就是建立精確的有限元分析模型。在HyperMesh有限元前處理環境下,對對數螺旋錐齒輪的網格選擇和劃分方法進行研究,并在普遍采用的單齒網格劃分方法的基礎上提出一種新的單齒網格劃分方法,提高了六面體網格的質量。對對數螺旋錐齒輪動態接觸分析中的關鍵問題進行分析和研究,從而建立該齒輪精確的動態嚙合有限元分析模型,為客觀、真實地模擬對數螺旋錐齒輪動態嚙合性能提供了必要的前提條件。
關鍵詞: 對數螺旋錐齒輪; 網格劃分; 動態接觸; 有限元分析模型
中圖分類號: TN98?34; TH132 文獻標識碼: A 文章編號: 1004?373X(2017)13?0168?03
Abstract: The necessary premise of dynamic contact analysis of logarithmic spiral bevel gear is to establish the accurate finite element analysis model. The mesh selection and classification methods of the logarithmic spiral bevel gear are studied in the environment of HyperMesh finite element preprocessing. A new single?tooth meshing method is proposed on the basis of the generally?used single?tooth meshing method to improve the quality of hexahedral mesh. The key issues of dynamic contact analysis of logarithmic spiral bevel gear are analyzed and researched to establish its accurate dynamic mesh finite element analysis model, which provides a necessary precondition to simulate the dynamic mesh performance of logarithmic spiral bevel gear objectively and truly.
Keywords: logarithmic spiral bevel gear; meshing; dynamic contact; finite element analysis model
0 引 言
對數螺旋錐齒輪是一種將對數螺旋線引用為齒向線的新型錐齒輪[1]。同一條對數螺旋線上具有螺旋角處處相等的特點,使得對數螺旋錐齒輪具備了等螺旋角嚙合的特性,這也使對數螺旋錐齒輪彌補了當前螺旋錐齒輪傳動中存在不同嚙合點處由于螺旋角不等帶來的應力變化大、平穩性差等缺點。與此同時,對數螺旋錐齒輪動態嚙合分析是一個高度邊界條件非線性的接觸動力學問題[2]。其精確求解的必要前提就是建立一個精確的有限元分析模型,而網格模型劃分的精確與否直接關系到分析求解的精確程度,由此可知,有限元前處理階段是整個有限元分析過程中最重要的一塊。目前有關對數螺旋錐齒輪有限元接觸分析的文獻較少,而且關于對數螺旋錐齒輪動態接觸分析前處理的文獻更是沒有。因此,對對數螺旋錐齒輪有限元分析模型創建的研究是很有必要的[3]。
考慮到對數螺旋錐齒輪的模型結構復雜,幾何扭曲大,為了能劃分出高質量的網格,本文將選擇專業的網格劃分軟件HyperMesh對其進行網格劃分[4]。
1 對數螺旋錐齒輪網格劃分
1.1 網格的選擇
六面體網格具有求解精度高、收斂性好,抗變形能力強,對位移求解結果準確等特點,所以在螺旋錐齒輪接觸分析中采用六面體網格[5]。當螺旋錐齒輪螺旋角很大時會致使一部分網格嚴重扭曲,而縮減積分單元C3D8R,在嚴重扭曲的情況下對分析精度影響較小,因此選擇縮減積分單元。另外,由于二次單元自身屬性,不能在接觸分析中使用,據此采用一次單元[6]。
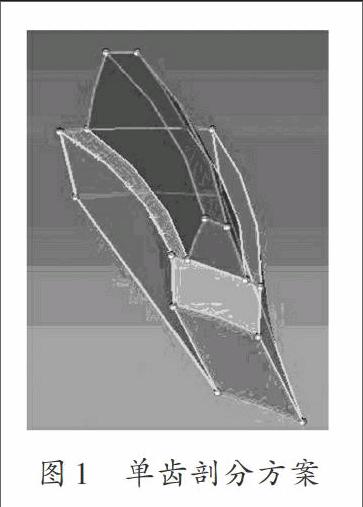
1.2 單齒剖分方法
對數螺旋錐齒輪由于其結構復雜無法直接對其劃分六面體網格,因此劃分網格前需要對其進行幾何剖分,使其變成幾個六面體或者類似六面體簡單的可以映射的區域[7]。六面體網格劃分的難點在于進行幾何剖分,剖分方案與HyperMesh沒有直接的關系,完全取決于個人對結構拓撲關系的理解。不同的人有不同的分塊方法,同時也存在著能力上的差異,沒有固定的流程[8]。
現如今螺旋錐齒輪研究也日漸成熟,其單齒剖分方法也相對成熟,介于對數螺旋錐齒輪獨特的結構,在傳統剖分方案的基礎上進行改良,得出適合對數螺旋錐齒輪的剖分方案,如圖1所示。
1.3 單齒網格劃分方法
單齒剖分后,劃分六面體網格有兩種方法:第一種是直接對每一塊進行六面體網格的劃分;第二種是先在各個塊的端面生成2D網格,然后掃略生成六面體網格。模型的復雜程度不同,端面2D網格的劃分選擇也是可以變通的,沒有固定的形式和套路。由于錐齒輪的模型結構較為復雜,僅僅依靠第一種簡單的自動生成體網格的方法無法滿足高質量的網格要求。基于此,大多數人采用第二種方法。但如何保證在滿足旋轉對接性的同時劃分出高質量的網格,這是劃分網格過程中需要關注的問題。
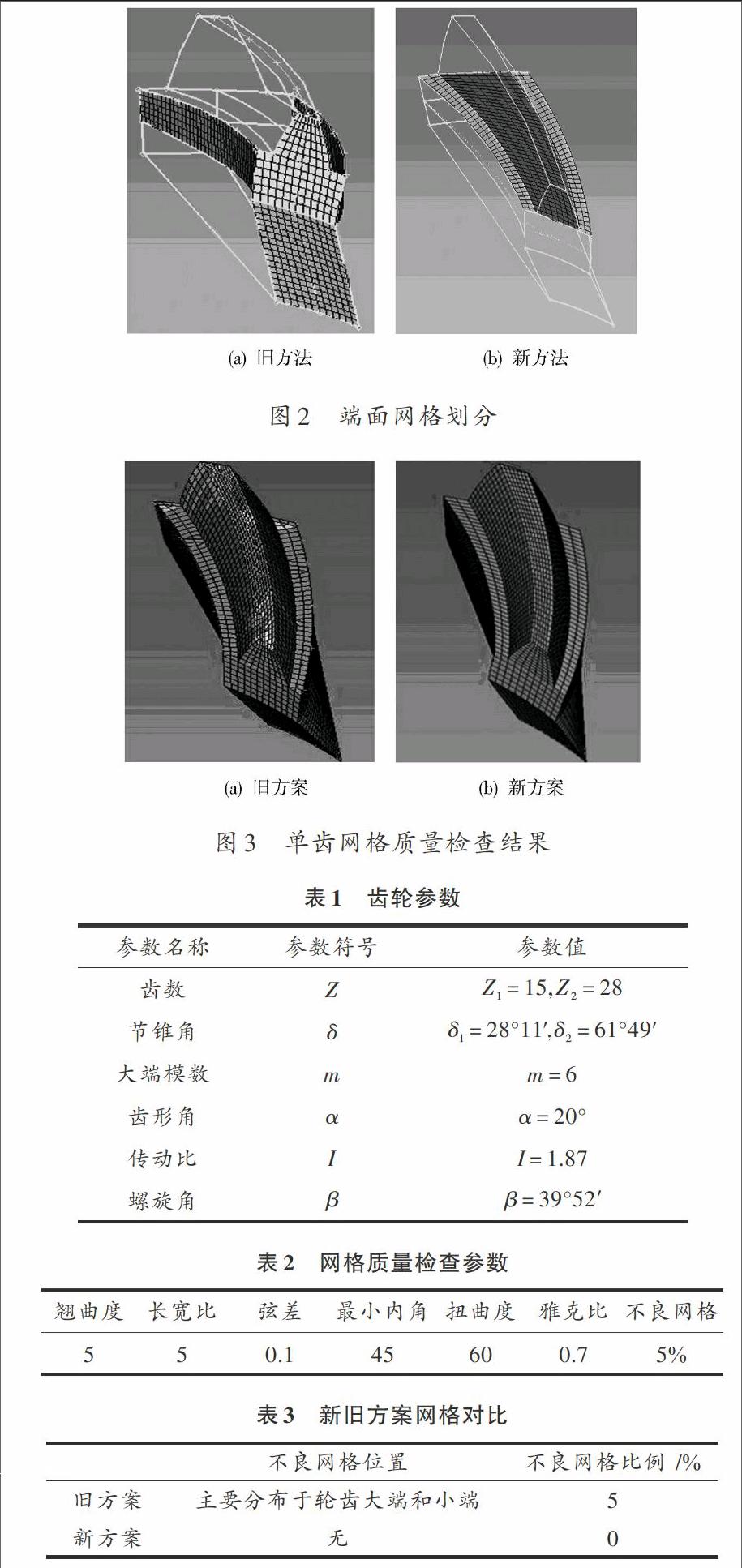
眾所周知,六面體網格的質量取決于2D網格的質量,為了劃分出高質量的六面體網格必須先劃出高質量的2D網格。本文在第二種方法的基礎上做出改進,得到一種新的網格劃分方法,與傳統方法進行對比,如圖2所示。圖2(a)為傳統單齒端面網格劃分方法,圖2(b)為新單齒端面網格劃分方法。新方法采用edit element命令手動創建和分割出高質量的2D網格,且2D網格劃分端面也與傳統方法的網格劃分端面位置不同。傳統網格劃分方法由于其端面2D網格的劃分位置,無法保證沿齒長方向生成規矩的六面體網格;而新方法則充分考慮了剖分塊的映射關系,在齒輪底部端面用手動創建、分割網格命令劃分出了高質量的四邊形網格,從而生成了高質量的六面體網格。
1.4 網格質量檢查
如圖3所示,對表1中的對數螺旋錐齒輪分別用新舊兩種方法對其大輪單齒進行網格劃分,并進行網格質量檢查,網格質量檢查參數如表2所示。圖3中標出了不合格的六面體網格,可以看到不合格網格主要位于輪齒大端和小端的齒頂位置。這些不合格的網格會在有限元分析中產生嚴重扭曲變形,影響有限元分析的精度。通過表3可以看出新方法優于舊方法。
2 對數螺旋錐齒輪動態接觸分析中的關鍵問題
2.1 有限元網格模型的確立
如圖4所示,錐齒輪有限元分析模型大都是部分齒有限元模型,不能準確反映錐齒輪的真實質量屬性,不能體現慣性載荷的影響,不適合進行動態接觸分析,只適合靜力學分析。針對對數螺旋錐齒輪動態嚙合分析問題,本文將建立全齒有限元分析模型。為了保證計算精度的同時又可以節約計算機資源,本文提出對大、小錐齒輪參與嚙合的輪齒進行網格細化,而對不參與嚙合的輪齒進行網格粗化。粗略網格與細分網格之間建立tie連接,進行應力的傳遞。
2.2 邊界條件和載荷的施加
由于六面體網格只具有平動自由度,不具有旋轉自由度,因此不能對錐齒輪直接進行載荷和邊界條件的施加。需要在齒輪的軸線上建立剛體參考點,使其與大、小錐齒輪的內圈表面建立耦合約束,從而將邊界條件和轉矩施加在參考點上。在此注意,根據Litvin教授研究得出:在靜力學分析中,剛體耦合參考點的位置在軸線上的任意一點即可,在動態嚙合分析時,剛體耦合參考點必須選擇在相應的齒輪質心上,以反映真實的齒輪質量屬性[9],如圖5所示。
2.3 接觸對的定義
在接觸分析中,接觸類型選擇面?面接觸,要求主從面均為連續的面,如圖6所示。在有限元分析中允許主面上的節點可以穿透從面,但從面上的節點不能穿透主面[10]。因此,在選擇主從接觸面時要按照以下原則:
(1) 主面要選擇剛度較大的面。
(2) 當分析模型的兩接觸面有相近的剛度時,選擇網格較密的接觸面為從面。
(3) 為了保證計算結果的精確性,盡量保證兩個接觸面的節點一致,但不要求一一對應。
2.4 沙漏控制
由于線性縮減積分單元自身的性質,會出現沒有剛度的零能模式,在接觸分析問題時,要格外注意這一問題。正常條件下,使用系統默認的沙漏控制選項即可。如果采用默認的沙漏控制選項仍然出現沙漏模式,可以選擇用細化網格的方法解決,不要隨便更改默認的沙漏控制選項。
3 結 論
對數螺旋錐齒輪動態嚙合分析與靜力學分析有限元模型差異很大。本文根據動力學原理和有限元理論,提出了動態嚙合有限元分析前處理模型的構建過程,為客觀、真實地分析對數螺旋錐齒輪動態嚙合性能提供了必要的前提條件。基于對數螺旋錐齒輪拓撲、映射關系及六面體網格的生成原理,提出一種新的利用手動創建和分割生成端面2D網格的方法生成了高質量的六面體網格,并與傳統方法做對比,提高了六面體網格的質量。對對數螺旋錐齒輪動態接觸分析中特別關注的關鍵問題做出分析和研究,并給出了解決方法,保證有限元分析的順利進行和計算結果的準確性。
參考文獻
[1] 楊高煒.對數螺旋錐齒輪嚙合特性研究[D].包頭:內蒙古科技大學,2012.
[2] 翟克仁.汽車螺旋錐齒輪嚙合率影響因素研究與有限元分析[D].荊州:長江大學,2012.
[3] 劉勇,張衛青,郭曉東,等.螺旋錐齒輪有限元接觸分析前處理[J].機械設計,2014(5):29?33.
[4] 武淑琴.對數螺旋錐齒輪嚙合仿真及強度計算研究[D].包頭:內蒙古科技大學,2011.
[5] 閆月.對數螺旋錐齒輪靜、動態接觸分析[D].包頭:內蒙古科技大學,2013.
[6] 王勖成.有限單元法[M].北京:清華大學出版社,2003:101?127.
[7] 石亦平,周玉蓉.ABAQUS有限元分析實例詳解[M].北京:機械工業出版社,2006:42?44.
[8] 王鈺棟,金磊,洪清泉.HyperMesh&HyperView應用技巧與高級實例[M].北京:機械工業出版社,2012:105?131.
[9] 彭方進.基于接觸動力學的螺旋錐齒輪動態嚙合性能有限元分析研究[D].長沙:中南大學,2010.
[10] 祝政委.弧齒錐齒輪參數化設計及有限元分析[D].合肥:合肥工業大學,2012.
