四旋翼飛行器的自抗擾控制方法研究
2017-07-12 20:43:39戴啟浩馬國(guó)梁
計(jì)算技術(shù)與自動(dòng)化 2017年2期
戴啟浩+馬國(guó)梁
摘要:【目的】為了檢驗(yàn)自抗擾控制方法是否可以應(yīng)用在四旋翼飛行器飛行控制系統(tǒng)。【方法】介紹了自抗擾控制器的原理以及基本組成。針對(duì)四旋翼飛行器低速飛行或懸停狀態(tài), 提出了一種基于自抗擾控制器的控制系統(tǒng)設(shè)計(jì)方法并在仿真平臺(tái)上進(jìn)行穩(wěn)定控制、高度控制實(shí)驗(yàn), 以及與PID控制系統(tǒng)進(jìn)行對(duì)比分析實(shí)驗(yàn)。【結(jié)果】仿真結(jié)果表明:基于自抗擾的四旋翼飛行器控制系統(tǒng)具有較好的動(dòng)態(tài)品質(zhì)、穩(wěn)態(tài)精度以及較強(qiáng)的魯棒性,【結(jié)論】本文所設(shè)計(jì)自抗擾控制器可應(yīng)用在四旋翼飛行控制系統(tǒng)。
關(guān)鍵詞: 四旋翼飛行器;自抗擾控制;擴(kuò)張狀態(tài)觀測(cè)器; PID控制
中圖分類號(hào):TP29 文獻(xiàn)標(biāo)識(shí)碼:A
Abstract:【目的】To test whether the ADRC can be applied in quadrotor flight control system。【方法和過程】This paper introduces the principle of ADRC and basic components.In view of the quadrotor flying at low speed or hover state,the writer puts forward a method of control system based on ADRC and on the simulation platform for stability control experiments,height control experiments,and analysis of the experiment compared with the PID control system .【結(jié)果】The simulation results show that: the control system based on ADRC has good dynamic quality ,steady precision and strong robustness.【結(jié)論】The adrc designed in this paper can be used in quadrotor flight control system.
Key words:quadrotor;ADRC;ESO;PID
1引言
四旋翼飛行器是一種比較熱門的新型旋翼無人機(jī),由于其具有機(jī)械結(jié)構(gòu)簡(jiǎn)單、可垂直起降、成本較低等特點(diǎn),因此被大量應(yīng)用于偵查,巡線,噴灑農(nóng)藥等領(lǐng)域。飛行控制系統(tǒng)設(shè)計(jì)是整個(gè)四旋翼飛行器控制系統(tǒng)的核心,常用的方法有PID[1],反步法[2]、自適應(yīng)法、滑模法、LQ[3]等。傳統(tǒng)的PID控制器采用控制目標(biāo)與實(shí)際輸出之間的誤差產(chǎn)生控制策略,但其調(diào)整時(shí)間較長(zhǎng),抗干擾能力較弱等缺點(diǎn)不能很好的滿足四旋翼飛控系統(tǒng)動(dòng)態(tài)指標(biāo)的實(shí)現(xiàn)。而后面這些基于現(xiàn)代控制理論的方法一般需要精確的數(shù)學(xué)模型且算法復(fù)雜,不利于實(shí)際控制應(yīng)用。
我國(guó)學(xué)者韓京清[4]提出的自抗擾控制方法是一種新型的控制技術(shù),具有抗干擾能力強(qiáng)、響應(yīng)速度快及算法簡(jiǎn)單的特點(diǎn),在大量理論研究和工程實(shí)際中均得到應(yīng)用。它通過狀態(tài)觀測(cè)器實(shí)時(shí)估計(jì)系統(tǒng)在工作時(shí)受到的外界干擾及系統(tǒng)本身的內(nèi)擾,并對(duì)其進(jìn)行補(bǔ)償,從而得到優(yōu)良的控制品質(zhì)。本文設(shè)計(jì)了一種自抗擾控制器,并進(jìn)行了仿真實(shí)驗(yàn),檢驗(yàn)了該自抗擾控制器的控制性能。
2四旋翼飛行器動(dòng)力學(xué)模型
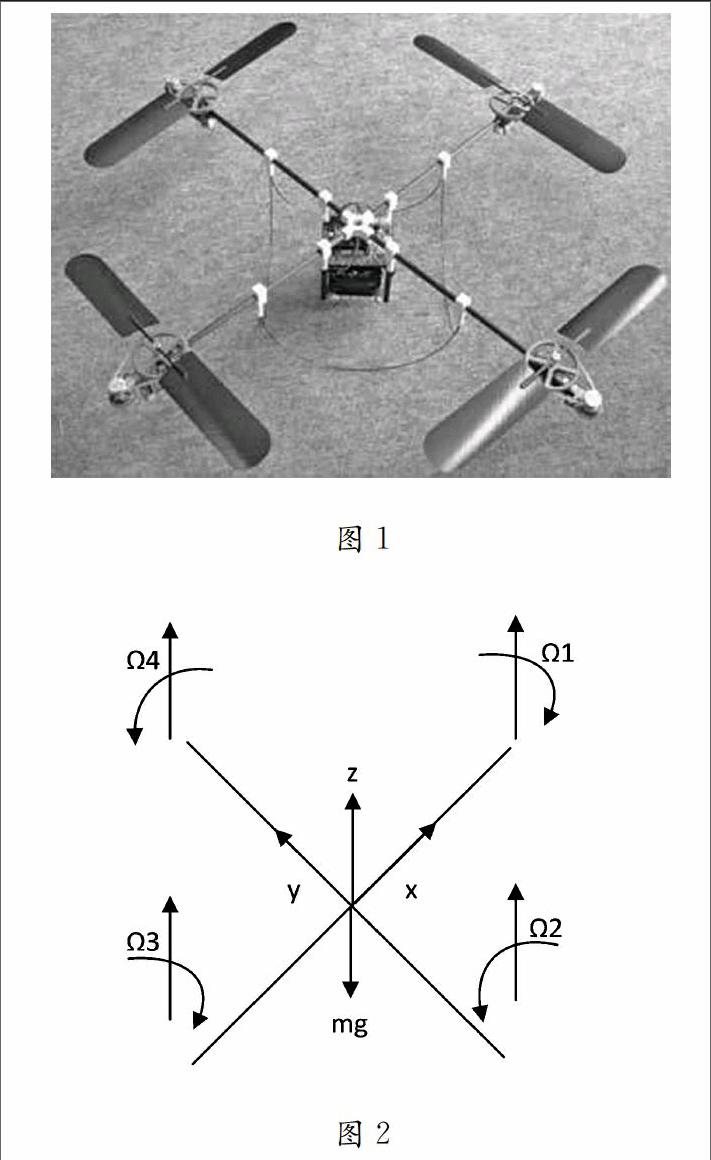
四旋翼飛行器如圖1所示,具有四個(gè)對(duì)稱分布的獨(dú)立螺旋槳,由四個(gè)獨(dú)立的電機(jī)驅(qū)動(dòng)繞三個(gè)機(jī)體軸和沿三軸線進(jìn)行六自由度[5][6]運(yùn)動(dòng)。根據(jù)牛頓-歐拉法,對(duì)四旋翼飛行器進(jìn)行動(dòng)力學(xué)建模。四旋翼飛行器坐標(biāo)系如圖2所示。
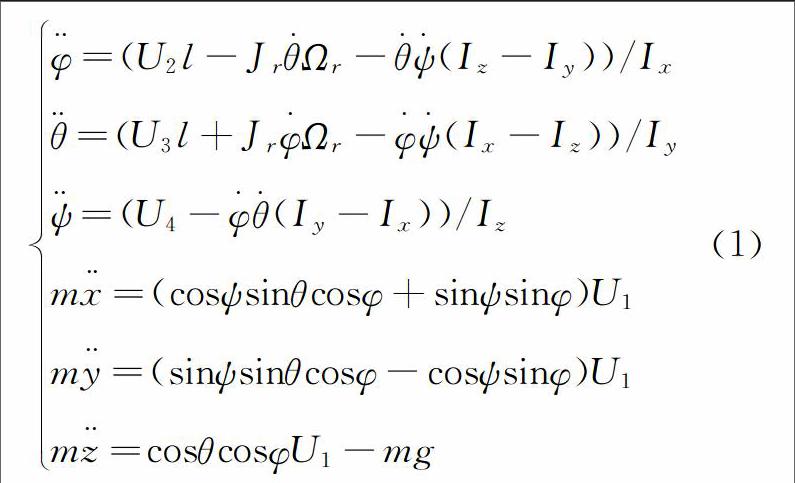
考慮到室內(nèi)或室外無風(fēng)條件下,四旋翼無人飛行器慢速飛行或懸停,對(duì)飛行器作以下假設(shè):四旋翼飛行器為均勻?qū)ΨQ的剛體,忽略旋翼中心至飛行器幾何中心的垂直距離,忽略其它外界干擾。基于上述假設(shè)條件的四旋翼飛行器動(dòng)力學(xué)模型為:
其中Φ、θ、ψ分別為俯仰角、滾轉(zhuǎn)角、偏航角,IX、IY 、IZ分別為飛行器繞三個(gè)機(jī)體坐標(biāo)軸的轉(zhuǎn)動(dòng)慣量,Jr為旋翼繞電機(jī)軸的轉(zhuǎn)動(dòng)慣量,Ωi為第i個(gè)旋翼的轉(zhuǎn)速,U1=b(Ω12+Ω22+Ω32+Ω42)、U2=b(Ω42-Ω22)、U3=b(Ω32-Ω12)、U4=d(Ω12+Ω32-Ω22-Ω42),Ωr=Ω2+Ω4-Ω1-Ω3,b為推力系數(shù),d為阻力系數(shù)。
3自抗擾控制器設(shè)計(jì)
3.1自抗擾控制器原理
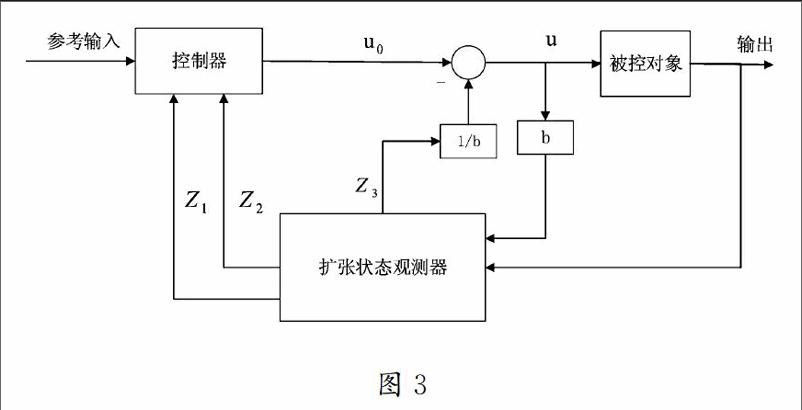
自抗擾控制器的基本組成包含擴(kuò)張狀態(tài)觀測(cè)器和擾動(dòng)估計(jì)的補(bǔ)償兩部分,其中實(shí)時(shí)估計(jì)擾動(dòng)及補(bǔ)償?shù)墓δ苁亲钥箶_控制器最本質(zhì)的功能。因此只要具有這個(gè)功能,該控制器即可稱為自抗擾控制器[7]。如圖3所示為一個(gè)典型的二階自抗擾控制器。
3.2控制器設(shè)計(jì)方案
由式(1)可以看出四旋翼飛行器系統(tǒng)三個(gè)姿態(tài)通道存在耦合關(guān)系。但在姿態(tài)角速率變化較小時(shí),相互間的耦合影響可以忽略,因此能夠按單通道控制系統(tǒng)分別設(shè)計(jì)。本文所采用的PID-ADRC控制器由PID控制器和擴(kuò)張狀態(tài)觀測(cè)器(ESO)組成,對(duì)俯仰、橫滾、偏航、高度四個(gè)通道[8][9]獨(dú)立控制,整個(gè)系統(tǒng)的結(jié)構(gòu)如圖4所示。
在姿態(tài)控制過程中,不希望角度響應(yīng)存在超調(diào),因?yàn)榻嵌葧?huì)影響位置的運(yùn)動(dòng),角度偏大或者振動(dòng)會(huì)導(dǎo)致多旋翼飛行器在飛行的過程中姿態(tài)不穩(wěn)定,甚至有墜機(jī)的危險(xiǎn),所以不采用欠阻尼系統(tǒng)(0<ζ<1)。而在過阻尼(ζ>1)和臨界(ζ=1)系統(tǒng)中,臨界阻尼響應(yīng)具有最短的上升時(shí)間和最快的響應(yīng)速度[10],所以取ζ=1。俯仰通道、偏航通道、高度通道同樣取ζ=1。在臨界阻尼系統(tǒng)中, ,當(dāng) 時(shí), ,不妨取 則 , 。利用同樣的方法可得相同的俯仰和偏航控制器參數(shù)。高度通道的參數(shù)整定和姿態(tài)器控制器相似,期望的調(diào)節(jié)時(shí)間為1~2秒,取ts=1s,則有 、 , 。
由式(3)知道線性擴(kuò)張狀態(tài)觀測(cè)器的特征方程[11]為s3+β01s2+β02s+β03,需選取合適的參數(shù)β01,β02,β03才能較為準(zhǔn)確的估計(jì)被測(cè)對(duì)象的狀態(tài)以及總擾動(dòng)。通常較穩(wěn)定的特征方程形式為(s+ω0)3,于是把參數(shù)β01,β02,β03配置成3ω0,3ω02,ω03形式。通常ω0=3~5ωc。
4仿真實(shí)驗(yàn)與結(jié)果分析
4.1姿態(tài)穩(wěn)定控制實(shí)驗(yàn)
首先在SIMULINK中對(duì)四旋翼飛行器姿態(tài)穩(wěn)定控制進(jìn)行仿真實(shí)驗(yàn)。多旋翼飛行器的參數(shù)采用EPFL的OS4[12][13]飛行器(“十”字形四旋翼飛行器),其固有參數(shù)包括:質(zhì)量m=0.65kg,機(jī)架臂長(zhǎng)l=0.23m,Ix=0.0075kg·m2,Iy=0.0075kg·m2,Iz=0.013kg·m2。經(jīng)過微調(diào),控制器參數(shù)選取為:β01=120、β02=4800、β03=64000。設(shè)定初始橫滾角為20?,俯仰角15?,偏航角10?,仿真指令是讓飛行器從高度0m至2m將姿態(tài)角穩(wěn)定在0?。仿真曲線如圖9所示。
從圖9可以看出, 三個(gè)姿態(tài)角在0.8s內(nèi),高度在1.5s左右達(dá)到設(shè)定值, 沒有超調(diào),振蕩極小,體現(xiàn)了該控制器的姿態(tài)穩(wěn)定控制能力。
4.2與PID控制器對(duì)比實(shí)驗(yàn)
在四旋翼飛行器的實(shí)際飛行過程中,會(huì)因?yàn)橥饨绺蓴_出現(xiàn)輕微的抖動(dòng),該仿真實(shí)驗(yàn)?zāi)M四旋翼飛行器在懸停時(shí)受外界干擾后姿態(tài)的調(diào)整過程。因四旋翼飛行器為對(duì)稱結(jié)構(gòu),滾轉(zhuǎn)角和俯仰角仿真曲線類似,限于篇幅,該實(shí)驗(yàn)只分析滾轉(zhuǎn)通道與偏航通道。為了比較本文所設(shè)計(jì)控制器和PID控制器的抗擾動(dòng)能力,在橫滾通道加入正弦干擾信號(hào)0.05sin(t),在偏航通道加入正弦干擾信號(hào)0.1sin(2t)。初始的滾轉(zhuǎn)角、偏航角分別為10?、6?。仿真指令是將姿態(tài)角恢復(fù)到0?。兩個(gè)通道的仿真曲線如圖10所示,仿真測(cè)試時(shí)間為20S,在干擾力矩作用下,PID-ADRC控制器跟蹤效果依然理想,滿足預(yù)期的設(shè)計(jì)要求。而PID控制器的響應(yīng)曲線雖然能夠跟蹤設(shè)定值,但會(huì)產(chǎn)生振蕩。由實(shí)驗(yàn)數(shù)據(jù)可知,本文所設(shè)計(jì)控制器很好地跟蹤并補(bǔ)償了所加擾動(dòng)。
5 結(jié)束語(yǔ)
(1)針對(duì)四旋翼飛行器動(dòng)力學(xué)模型,設(shè)計(jì)了一種PID-ADRC自抗擾控制器。
(2)在SIMULINK中搭建了系統(tǒng)仿真圖,并通過進(jìn)行姿態(tài)穩(wěn)定控制、干擾力矩作用下與PID控制器對(duì)比等仿真實(shí)驗(yàn)來驗(yàn)證所設(shè)計(jì)控制器的抗擾性和魯棒性,仿真結(jié)果證明該控制器能夠穩(wěn)定運(yùn)行,具有較好的魯棒性與控制精度。
(3)由于擴(kuò)張狀態(tài)觀測(cè)器將未建模動(dòng)態(tài)、耦合影響及外部干擾影響作為總和干擾進(jìn)行估計(jì)并動(dòng)態(tài)反饋補(bǔ)償,使得自抗擾控制器的設(shè)計(jì)無需精確的四旋翼飛行器被控模型,克服了實(shí)際中難以建立精確被控模型并獲取外界干擾的困難,具有工程應(yīng)用價(jià)值。
參考文獻(xiàn):
[1] Li Y, Song S. A survey of control algorithms for Quadrotor Unmanned Helicopter[A]. 2012
IEEE Fifth International Conference on.Advanced Computational Intelligence (ICACI),
Nanjing,China, 2012: 365-369.
[2] Madani T ,Benallegue A .Backstepping control for a quadrotor helicopter[A].Proceedings of
the 2006 IEEE/RSJ International Conference on International Conferrence on Intelligent
Robots and Systems[C].Beijing,China,2006:3255-3260.
[3] Bouabdallah S ,Noth A,Siegwart R.PID vs LQ control techniques applied to an indoor micro
quadrotor[A].Proceedings of the 2004 IEEE/RSJ International Conference on International
Conferrence on Intelligent Robots and Systems[C].Sendal,Japan,2004:2451-2456.
[4] Gao Z.Active Disturbance Rejection Control:A Paradigm Shift in Feedback Control System
Design [C].Proceedings of the 2006 American Control Conference Minneapolis, Minnesota,
USA, June 14-16, 2006.
[5] 齊曉慧, 王洪軍.四旋翼無人機(jī)的自抗擾控制研究[J].測(cè)控技術(shù), 2014 ,33(5): 61 – 64.
[6] 李毅,陳增強(qiáng),劉忠信.自抗擾技術(shù)在四旋翼飛行姿態(tài)控制中的應(yīng)用[J].哈爾濱工業(yè)大學(xué)
學(xué)報(bào),2014,46,(3).
[7] 韓京清.自抗擾控制技術(shù)—估計(jì)補(bǔ)償不確定因素的控制技術(shù)[M].北京:國(guó)防工業(yè)出版
社,2008.
[8] 張廣昱,袁昌盛. 基于自抗擾理論的小型四旋翼飛行器姿態(tài)控制[J].航空工程進(jìn)展,
2014 ,5 (3).
[9] 劉一莎,楊晟萱,王偉.四旋翼飛行器的自抗擾飛行控制方法[J].控制理論與應(yīng)用,2015
,32(10).
[10] 胡壽松. 自動(dòng)控制原理 (修訂本)[M]. 北京: 機(jī)械工業(yè)出版社, 2008.
[11] Gao Z. Scaling and bandwidth-parameterization based controller tuning[C].Proceedings of
the American control conference. 2006, 6: 4989-4996.
[12] Bouabdallah S. Design and control of quadrotors with application to autonomous
flying[D]. ?cole Polytechnique federale de Lausanne, 2007.
[13] Lim H, Park J, Lee D, et al. Build your own quadrotor: Open-source projects on unmanned
aerial vehicles[J]. Robotics & Automation Magazine, IEEE. 2012, 19(3): 33-45.