分層遞階智能控制在IC測試分選機中的應用
2017-07-31 18:46:52梁達平趙利民蔡志元
電子工業專用設備 2017年3期
梁達平,趙利民,蔡志元
(1.天水師范學院電信與電氣工程學院,甘肅天水741000;2.天水華天科技股份有限公司,甘肅天水741000)
分層遞階智能控制在IC測試分選機中的應用
梁達平1,趙利民1,蔡志元2
(1.天水師范學院電信與電氣工程學院,甘肅天水741000;2.天水華天科技股份有限公司,甘肅天水741000)
針對目前IC測試分選機因各功能單元之間無協調控制算法而導致的產能競爭沖突問題,在改進型分選機設備中引入了其它行業解決類似問題比較成功的分層遞階控制結構,并在該結構中的組織級控制層采用了智能化程度較高的專家控制策略,在執行級控制層中采用了控制精度較高的迭代學習策略。通過對改進前后兩種設備的算法模型進行實測數據對比分析,證明采用分層遞階控制方案的設備性能要遠優于采用傳統方案的設備,其流水線配合協調度明顯提高,并具有良好的動態特性和魯棒性。
分層遞階控制;專家控制;迭代學習控制;測試分選機
IC測試分選機是集成電路芯片封測工藝流程中的重要生產設備,能夠自動將完成封裝的芯片根據各站測試數據進行產品等級分檔并裝入對應管條中,大大減輕了分揀操作的人工工作量。評價設備控制性能的主要指標是每小時分檔完成芯片數(以下簡稱NUPH),理想產出數量為4 500~5 500粒/h。為了提高NUPH值,目前市場上銷售的大多數分選機設備對芯片產品在各單元過站的速率不加限制,功能單元配合度方面幾乎沒有任何算法設計,這就造成單元之間產能無序競爭、缺乏整體協調,導致NUPH值失控和經常性卡料,反而影響了設備的整體產能效率。
針對上述問題,設備供應商也進行了相關技改和研發,但研究重點主要都集中在設備部件優化和控制精度提高方面,而在單元間協調控制算法優化方面卻關注甚少。此外,各類技術文獻庫中也幾乎沒有相關研究的資料。因此在確定技改方案時,需要更多地借鑒其它行業中類似問題的解決方案。例如,文獻[1]中提出一種基于專家思想的PID控制算法,設置多種方式實現不同工況下的伺服控制,滿足了永磁同步電機速度伺服控制系統較快的跟蹤性能和較強的抗干擾能力的需求。文獻[2]提出了一種基于移動機器人運動模型的模糊開閉環PID-P型非線性離散迭代學習控制方法,并給出了PID-P型迭代學習的收斂條件及其證明過程。文獻[3]為解決任意初態下的軌跡跟蹤問題,針對一類含參數和非參數不確定性的非線性系統,提出基于濾波誤差初始修正的自適應迭代學習控制方法。文獻[4]利用物聯網技術搭建多列車協同控制條件下實時交互技術框架,建立分層遞階控制模型,通過列車牽引控制策略實現多列車間動態協同控制。文獻[5]建立了一種基于分層遞階的片煙干燥智能控制系統,由溫度基準尋優模塊 (組織級)、含水率穩定控制模塊(協調級)、熱風溫度單回路PID控制 (執行級)3個層次構成。
綜合上述文獻資料,可以看出分層遞階智能控制能夠將控制任務劃分為多層結構,將組織規劃、配合協調、流水線生產等功能由不同控制層分別實現并相互協作,從而達到智能性與精確性并重的控制效果。該方法適用于各類程序控制系統,已經成功地在交通、電力、人工神經網絡、仿人智能控制等領域獲得應用。測試分選機控制由多個功能單元完成,要做到各單元之間良好的協調配合,顯然需要更高一級的智能控制層進行統籌,因此引入分層遞階智能控制結構是很適合的。
1 分層遞階控制結構設計
成熟的分層遞階控制理論由Saridis于1977年提出[6],其控制模式包括3級遞階結構,分別是組織級、協調級和執行級,每一級控制器在算法上沒有限制,可根據控制對象、性能要求選用適合的方法。經過對測試分選機功能的層次分析,建立分層控制結構如圖1所示。
組織級負責系統的規劃、決策、推理等,偏重于高智能性和低控制精度,因此算法上采用專家控制策略。通過組織級控制器的統籌規劃,將各單元的NUPH值限制在合理范圍內,以保證相互之間最佳的配合效果,避免出現產能競爭和產品擁堵的情況。
協調級是組織級與執行級的中間接口,負責將組織級指令發送給各執行級,并采集反饋執行級的輸出信息。由于分選機控制器采用的是DDC (直接數字控制)結構,整個系統的主控功能由一臺工業控制計算機集中實現,屬于單控制器模式,因此在控制算法執行的微觀層面是順序掃描各功能單元,并不存在物理上真正獨立的單元控制實體,也就不會產生因通信資源競爭導致的協調沖突問題,所以該功能層可以省略。
執行級由6個平級的功能單元控制器組成,分別為上料單元、旋轉送料單元、ISO絕緣測試單元、核心測試及打印單元、分類梭單元、出料單元,各功能單元之間采用流水線順序工作方式,負責各自具體的生產過程控制,偏重于高控制精度和低智能性,并且控制行為具有重復性,因此算法上采用迭代學習策略。執行級控制器的核心任務就是將組織級控制器給定的NUPH期望值盡可能精確地實現,從而實現組織級產能協調的宏觀目標。
2 組織級專家控制算法設計
專家控制的優點在于無需建立精確數學模型和控制律,對于變化性強的控制對象有較強的適應性,從控制效果上來講具有宏觀性,這與模型控制算法相結合可以達到取長補短的優化效果。決定專家控制算法性能優劣的關鍵在于選取恰當的規則評估指標。
2.1 專家控制系統結構設計
根據專家控制理論將控制結構設計為4個主要部分,包括控制性能識別單元、輸出量特征識別單元、知識庫、推理機,如圖2所示。由于組織級控制器需要協調功能單元之間的配合,因此采用多輸入多輸出線性疊加的多變量專家控制結構。輸入信號為各單元的實時NUPH輸出值,由推理機進行規則檢測并完成輸出信號生成。輸出信號為修正后的各單元最優NUPH值,作為對應單元執行級控制器的目標值輸入。
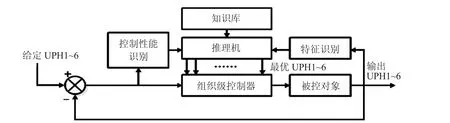
圖2 組織級專家控制系統結構圖
2.2 知識庫設計
根據對多臺分選機設備大量實際生產數據分析測試,將設備工作在最優狀態(是實測數據最優,不是理論值最優,以下簡稱最優,最優狀態在原設備中不具有持續性和可控性)時各單元與核心測試及打印單元的產能比值關系ki(計算方法如公式1所示)以專家規則的形式記錄在知識庫中,如表1所示。選定核心測試及打印單元NUPH值作為比值基準是因為該單元是整個設備的工作瓶頸點,同時也是對NUPH要求最高的單元。在生產過程中,可以根據核心測試及打印單元的實時NUPH值和預設的期望軌跡NUPH值確定當前所處的NUPH階段,然后通過知識庫的對應規則反推出各單元的最優NUPH值,與各單元的實時NUPH值相比較檢測是否處于最優產能狀態,如果沒有則進行修正,并作為組織級輸出信號傳遞給各執行級控制器。

這樣就可使設備自運行開始,各功能單元的NUPH值之間始終保持最優比值關系,將原有設備偶然達到的高協調度流水線生產狀態全程復現。組織級控制器能夠對生產速率過快或過慢、有可能導致流水線瓶頸或擁塞的單元進行及時調整和抑制,保證了生產過程的穩定性,避免了因控制算法缺陷而產生的停機卡料現象。

表1 知識庫規則表
3 執行級迭代學習控制算法設計
迭代學習控制理論于上世紀80年代提出,主要思路為通過函數迭代方法尋找控制輸入v(t),構造用于修正控制作用的學習律,使其產生的函數序列|vk(t)|收斂于v(t)。并且在v(t)作用下,系統的輸出y(t)在區間[0,T]跟蹤甚至與期望輸出軌跡yd(t)重合。該控制算法可以利用較為簡單的模型,不需要辨識系統參數,就能夠達到對輸出信號的高精度跟蹤,且具有較好的魯棒性,能夠處理動力學系統中的不確定性,特別適用于具有重復運行特征的非線性、強耦合、無法建立精確模型卻需要高精度的工業控制系統。由于分選機各功能單元均是通過重復性控制動作完成產品的過站操作;同時,作為分層控制結構的執行級來說控制精度要求是3個層次中最高的,需要能夠精確實現組織級給定的目標值;因此執行級控制器的算法采用迭代學習是十分適合的。
3.1 動力學模型的建立
分選機各功能單元的執行動作主要通過將高低電平信號傳遞給電磁閥控制氣缸伸縮來實現,動作速率通過定時器延時控制。如果將氣缸的延時與伸縮動作合并考慮,就可以看成是具有可調速率的漸進式執行機構,從而將每個功能單元描述為典型的一階慣性系統,其控制方框圖如圖3所示。圖中v(t)為某個功能單元的輸入控制作用,即氣缸運動速率;y(t)為該功能單元的UPH輸出;K1、K2、Km為前向及反饋通道放大系數;Tm為系統時間常數。
將方框圖化簡可寫出系統微分方程表達式:

式中:a=(1+K1K2Km)/Tm,b=K1Km/Tm。在零初始條件下,可得微分方程的解為:

圖3 各功能單元控制方框圖

在區間[0,T]上給定NUPH變化的理想軌跡yd(t),然后尋找輸入氣缸運動速率v(t),使得在該輸入作用下,輸出NUPH在[0,T]上與yd(t)一致。
3.2 學習律設計
采用D型學習律[7],可得到如下迭代過程:
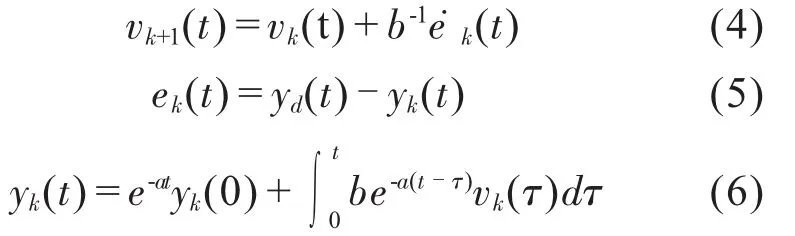
如公式(4)~(6)所示,氣缸在vk+1的輸入作用下進行第k+1個周期的運動控制,并產生控制誤差ek+1(t),以上學習過程被反復迭代執行。可以看出,決定該學習是否有效的關鍵在于證明t∈[0,T]區間時,當k→∞,能否保證|e(t)|→0,即算法是否收斂。
3.3 收斂性證明
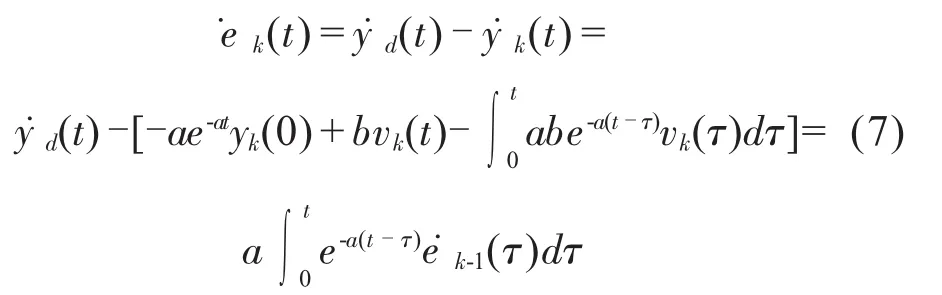
對于可重復系統來說yk(0)=yd(0)(k=0,1,2,…),則輸出誤差可表示為:
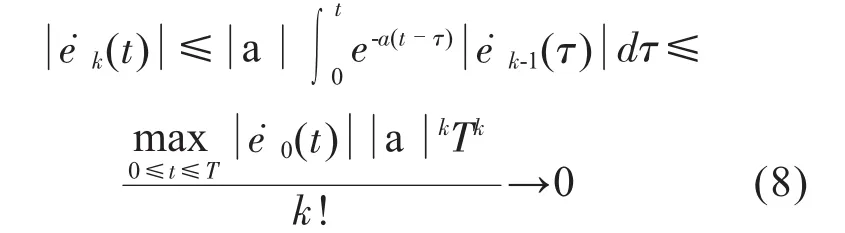
進一步的,當k→∞時可以得到:
根據定理[8]:可導函數y1(t)和y2(t),滿足y1(t) =y2(t)(t∈[0,T])的必要條件是:

對于系統實際輸出yk(t)與期望軌跡輸出yd(t),以上兩個條件均滿足,則可知系統輸出誤差一致性收斂,即

4 實驗數據分析
以ISO絕緣測試單元為例,將開機運行后產生的UPH輸出數據序列和期望軌跡數據序列提取出來,利用Matlab軟件繪制出對應的各點坐標,并進行5階多項式擬合處理,從而得到平滑的系統時間響應曲線。為了與原有設備的簡單比例控制響應曲線加以比較,對原設備數據序列也進行了采集和相同處理,將得到的響應曲線進行疊加,如圖4所示。
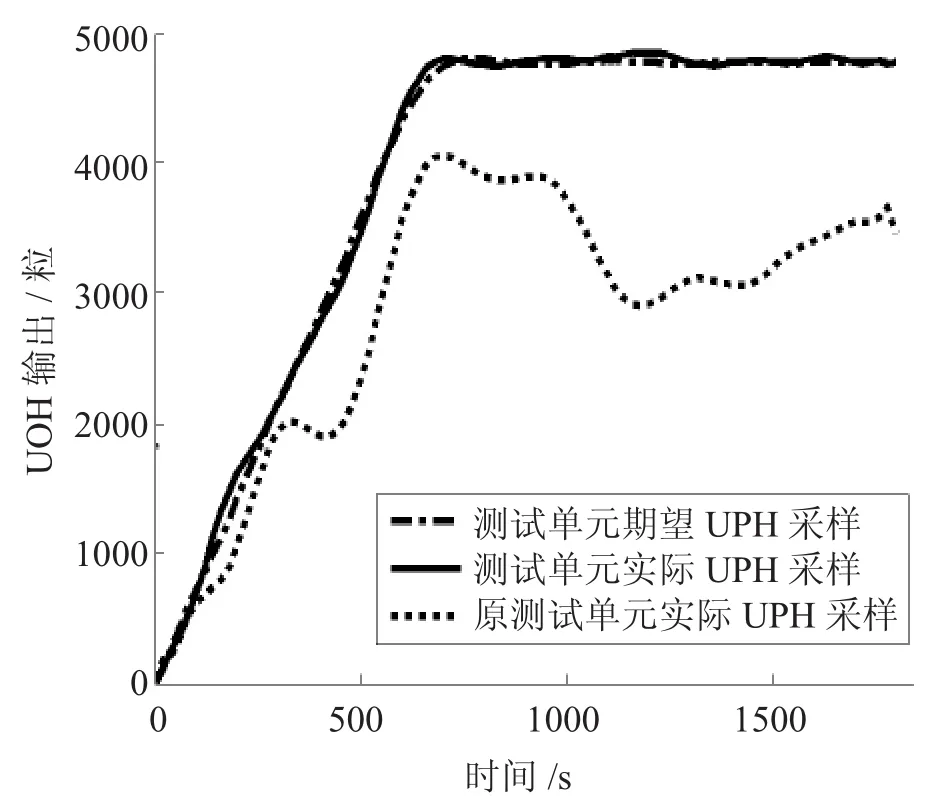
圖4 輸出響應與期望曲線對比
顯然,引入分層遞階控制結構和相關算法后,降低了系統響應的振蕩幅度,縮短了調節時間,經過重復迭代學習的實際輸出響應可與期望軌跡很好地重合,系統能夠快速完成軌跡調節。達到穩態后,對于猝發干擾信號的抑制效果很好,因干擾引起的輸出偏離幅度只有不到3%,并且能夠恢復至穩態無差(原設備采用的比例控制在受到干擾后穩態誤差無法完全消除),明顯地改善了系統的動態特性、干擾抑制性及魯棒性。
由于組織級與執行級控制器均實現了更好的控制效果,從而使各單元的UPH比值關系能夠始終保持在最優比附近,流水線配合的協調度明顯提高,設備卡料頻率由平均每分檔1 800粒芯片卡料1次下降至每分檔4 000粒芯片卡料1次。相應地,設備每小時產出數(NUPH)由原來的平均4 300粒/h提高至平均5 300粒/h。
5 結 論
本文針對IC測試分選機各功能單元之間產能缺乏協調經常引起芯片卡料停機的問題,將應用于其它行業解決層次控制問題比較成功的分層遞階控制結構引入分選機控制器算法中,并在該控制結構中的組織級控制層采用智能化程度高的專家控制策略,在執行級控制層中采用控制精度高的迭代學習策略。因為在硬件結構上并未作任何改動,所以整個技術改進工作沒有增加設備制造成本。通過對改進前后兩種設備算法模型基于NUPH變化進行的實測數據對比分析,證明在制造成本不變的前提下,采用分層遞階控制方案的設備性能要遠優于采用傳統簡單比例控制方案的設備,其系統NUPH輸出響應曲線能夠很好地與期望軌跡重合、并快速響應達到無差穩態值,從而得到最優的實時NUPH輸出,同時也降低了設備的卡料頻率。
[1] 呼文豹,郭銳鋒.基于專家PID控制器的伺服系統速度控制研究[J].計算機工程與設計,2013,34(7):2372-2376.
[2] 劉國榮,張揚名.移動機器人軌跡跟蹤的模糊PID_P型迭代學習控制[J].電子學報,2013,41(8):1536-1541.
[3] 嚴求真,孫明軒,李鶴.任意初值非線性不確定系統的迭代學習控制[J].自動化學報,2016,42(4):545-555.
[4] 孟建軍.無人駕駛城軌車輛運動分析與控制策略研究[D].蘭州:蘭州交通大學,2014.
[5] 張良斌,堵勁松,范明登.基于分層遞階的片煙干燥智能控制系統[J].煙草科技,2016,49(11):87-93.
[6] 劉金琨.智能控制[M].第三版.合肥:中國科學技術大學出版社,2014.
[7] 謝勝利.迭代學習控制的理論與應用[M].北京:科學出版社,2015.
[8] 邱伯騶.高等數學[M].第五版.北京:高等教育出版社,2013.
Design of a Controller of IC Testing Handler on Hierarchically Control Algorithm
LIANG Daping1,ZHAO Limin1,CAI Zhiyuan2
(1.School of Electronic Information and Electrical Engineering,Tianshui Normal University,Tianshui 741000,China; 2.Tianshui Huatian Technology Co.,Ltd.,Tianshui 741000,China)
All function units production capacity competition by reason of no control algorithm is the key problem to keep IC testing handler normal operation.A hierarchically control algorithm is used in new advanced testing handler,which has solved lots ofsimilarproblems successfullyin other industries. In this control structure,the expert control strategy is used in organization level,and the iterative learning control strategy is used in executive level.The result of experiment data indicates that the new method could improve coordination of the pipeline,reduce settling time and overshoot,and the new control algorithm has better interference suppression and robustness than regular algorithm.
Hierarchically control;Expert control;Iterative learning control;IC test handler;
TP273
A
1004-4507(2017)03-0026-05
2017-03-24
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
