太陽能無人機能源控制器研究與設計
2017-07-31 18:47:00陸運章程文進張建國楊曉生張佳亮
電子工業專用設備 2017年3期
關鍵詞:系統
陸運章,郭 進,程文進,周 蒙,張建國,楊曉生,張佳亮
(中國電子科技集團公司第四十八研究所,湖南 長沙 410111)
太陽能無人機能源控制器研究與設計
陸運章,郭 進,程文進,周 蒙,張建國,楊曉生,張佳亮
(中國電子科技集團公司第四十八研究所,湖南 長沙 410111)
對太陽能無人機能源控制器的設計進行了詳細的闡述,對能源系統在地面情況下發電與帶載運行情況進行了實驗驗證。該方案設計選用最大功率點跟蹤 (Maximum Power Point Tracking,MPPT)技術,實現了對太陽能無人機能源系統中光伏陣列、儲能電池自動充放電管理功能。該方案設計電路簡單、系統轉換效率高、適應性強,可作為臨近空間飛行器電源系統的理想選擇之一。
太陽能無人機;能源控制器;最大功率點跟蹤
太陽能無人機利用太陽能提供能源,鋰離子電池、鋰硫電池等二次電池存儲電能,多組電機螺旋槳進行推進,可以實現無人機的長航時高空飛行[1]。在軍事偵察、高空通信中繼、環境監測、林區管理、科學研究等領域具有廣闊的應用前景,是高空長航時無人機的一個重要發展方向之一[2]。其中能源管理系統作為太陽能無人機能源系統的控制調節中心,主要功能是實現太陽電池陣輸出功率控制,以及對電源系統中的儲能電池組進行充放電管理,為無人機電機螺旋槳及飛控、傳感器等航電設備提供可靠、充足的能量[3]。
由于太陽能無人機的光伏陣列鋪裝面積有限,收集太陽能量受限,因此提高太陽能整體發電能力與利用效率是未來的重點研究方向之一[4]。目前對于太陽能無人機光伏陣列的能量輸出方式,通常能源管理系統采用恒壓輸出方式來對儲能電池進行充電[5],其能量利用效率低,為提高能量利用效率,設計高效的能源管理系統勢在必行。本文介紹了一種電路設計簡單、系統轉換效率高的太陽能無人機能源控制器,可供未來的臨近空間飛行器電源系統選擇。
1 能源系統介紹
如圖1所示,太陽能無人機能源系統主要包括無人機光伏陣列、能源控制器、儲能電池組和負載設備。太陽能無人機能源系統采用分布式發電、高壓傳輸、集中配電、就近轉換的電源配電及管理設計思想。無人機光伏陣列采用分布式發電模式,機翼同一受光曲面的光伏陣列構成一個發電單元,盡量減少由于機翼曲面導致的光強不均對系統整體發電功率影響;大功率、長距離傳輸電能采用高壓直流母線傳輸,盡量減少傳輸損耗;DC-DC轉換電路及控制電路盡量布置在負載設備附近,就近轉換供電。能源供給系統為提高能源系統輸出效率,采用分布式MPPT模式為儲能電池充電和負載供電。每個MPPT模塊負責機翼表面同一受光曲面的光伏陣列,使用多個MPPT模塊構成分布式MPPT能源控制器。
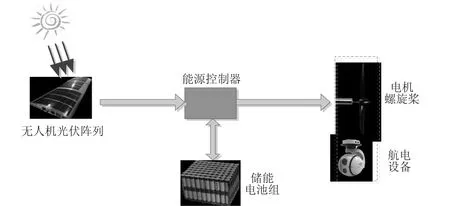
圖1 無人機能源系統示意圖
2 設計思路
2.1 能源系統配置
通常無人機直流電機額定電壓為直流48 V,為匹配電機電壓,能源管理系統提供一條46~ 60 V的直流母線,通過直流母線DC-DC降壓實現機載其他設備電源電壓。如圖2所示,能源管理系統采用分布式MPPT模式和直流母線體制,分別由不同的MPPT模塊實現對機翼同一受光曲面的光伏陣列功率進行最大跟蹤輸出,儲能電池組并聯在母線上,而機載設備電源控制部分通過直流母線變換電壓獲得。當太陽電池陣輸出功率充足時,發電電能通過直流母線給負載供電,余電存儲在儲能電池中;當太陽電池陣輸出功率不足時,通過儲能電池組放電控制對負載進行聯合供電。
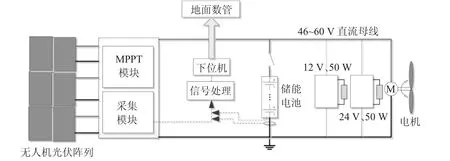
圖2 能源管理系統電路連接示意圖
2.2 MPPT控制電路設計
能源控制器的作用是實現太陽電池陣最大功率點跟蹤、蓄電池的自適應放電、負載電壓變化跟隨。如圖3所示,其關鍵步驟是通過一個最大功率點跟蹤芯片,驅動一個DC-DC變換電路,使能源管理器在輸入端實時跟蹤太陽電池組件的最大功率點,保證光伏陣列峰值功率輸出,輸出端自動適應負載電壓變化,母線電壓跟隨儲能電池變化,這樣可大大簡化系統結構,同時又能保證太陽電池陣最大功率輸出。
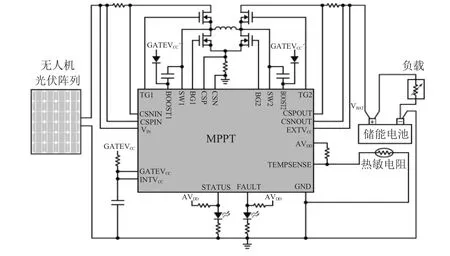
圖3 MPPT控制電路原理圖
MPPT芯片包括輸出電流、輸入電流、輸入電壓和輸出電壓4種不同的調節形式。當由一塊光伏組件供電時,MPPT功能先通過“擾亂觀察法”來搜索光伏組件的最大功率點,采用輸入電壓調節以定位和跟蹤電池組件的最大功率點。輸入電流調節用于限制從輸入電源吸收的最大電流;輸出電流調節負責限制儲能電池的充電電流,而輸出電壓調節則用于設定最大儲能電池的充電電壓,實現過充保護。
MPPT能源管理模塊在搜索光伏組件最大功率輸出過程中,既可以工作于降壓模式,也可以工作于升壓模式,這主要通過DC-DC實現,其工作原理簡圖如圖4所示。
2.3 數據采集電路設計
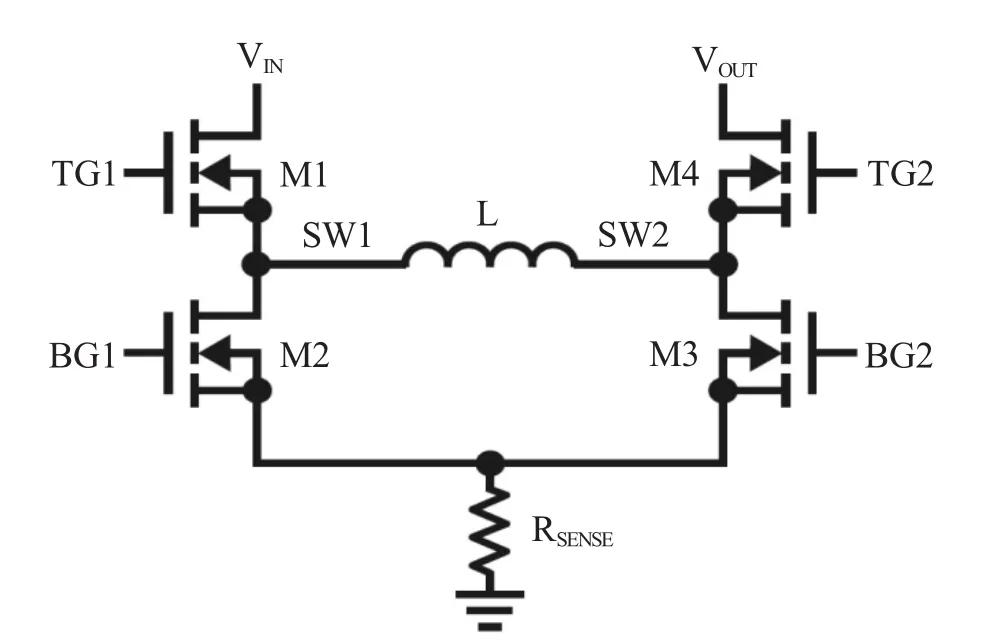
圖4 簡化的DC-DC電路工作原理圖
能源控制器的整體設計要求采集每路MPPT模塊的輸入電壓、輸出電壓、輸入電流、輸出電流、儲能電池電壓、儲能電池充/放電電流、儲能電池組內部溫度、控制器腔內溫度、光伏組件表面溫度等參數,以便能源控制器工作時,可以監控其工作狀態,并評估不同工況下的工作效率。數據采集電路實現對上述數據的采集,并發送給飛控。數據采集電路由電源供電電路、單片機及復位電路、數據通訊電路、模擬量輸入低通濾波電路、調節電路組成。
采集電路在采集MPPT的輸入、輸出電流及負載工作電流時均采取霍爾電流傳感器方式,在采集輸入與輸出電壓時采取電壓互感器方式,使得采集電路與MPPT模塊電路隔離,不僅解決了MPPT模塊串聯使用時各物理量懸浮地的問題,同時提高了采集的各參數準確度。數據采集電路帶RS422通訊接口,可將儲能電池組BMS電路板的SOC信息傳輸給數據采集電路單片機,實現儲能電池數據的實時監測,同時也將采集到的數據發送給飛控,實現飛控對整個能源管理系統參數的實時監測。
2.4 DC-DC電路設計
無人機的DC-DC電路部分使用市面上成熟的直流-直流變換器(DC-DC電源模塊),機載設備電源控制部分通過母線降壓變換獲得,完成對電壓為24 V的飛控等負載與電壓為12 V的數傳、攝像等負載的轉換,DC-DC電路原理如圖5所示。

圖5 DC-DC電路原理圖
3 實驗及結果分析
如圖6所示,能源管理系統的電性能測試由無人機光伏陣列、能源控制器、儲能電池組、DC-DC和阻性負載構成,數據采集端接入工控機作為上位機。
在晴天太陽輻照度較好的時候,將光伏組件裝機功率為1.2 kW的無人機機翼平鋪在地面,無人機機翼上的光伏陣列按6個不同受光面劃分為6個光伏組件,分別與6路MPPT模塊連接;采用48 V的蓄電池作為儲能電池組;兩個DC-DC分別將母線電壓降至24 V與12 V,3個阻性負載分別模擬電機、傳感器和飛控等700 W的設備負載。能源控制器數據采集模塊以1 Hz的采樣頻率采集各個參數,并通過RS422總線在測試過程中上傳測量參數至上位機。
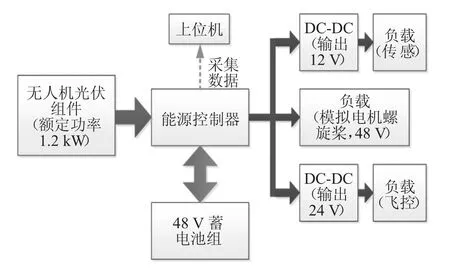
圖6 無人機能源系統測試接線圖
實時監測的能源系統發電情況如圖7所示,測試時間從中午11:30開始持續至下午16:40,機翼光伏組件工作正常,從11:30至14:40(間隔大于3 h),經過MPPT模塊轉換后的輸出功率平均值大于600 W,最大值為721 W(出現在12:09:02,此時對應的太陽輻照度為700 W/cm2),表明能源控制器的輸出功率正常,在中午至少有3 h可完全通過無人機光伏陣列輸出電能來滿足600 W負載的正常工作。下午隨著太陽光的減弱,輸出功率逐漸降低。
對應的能源控制器MPPT模塊輸出電壓與輸出電流曲線如圖8所示,由于MPPT模塊的輸出電壓被蓄電池組電壓鉗位,而光伏陣列的發電功率與負載耗電功率接近,因此在11:30到15:10期間的輸出電壓基本維持在48 V。從15:10開始將所有負載斷開,MPPT模塊只對蓄電池組充電,由于蓄電池組流入的電流從基本為0迅速增大到10 A以上,因而蓄電池組輸入端的電壓也迅速上升至52 V并逐漸穩定,表明能源控制器的MPPT模塊對蓄電池的充電功能正常,負載切換不影響系統運行。
能源控制器MPPT模塊的轉換效率測試的部分數據如表1所示。從表1可知,所選的每10 min一組數據計算得到MPPT轉換效率均大于97%,可見該系統具有良好的轉換效率,在能源控制器所測時間點的輸出功率大于650 W的情況下,其發熱功率均小于20 W。
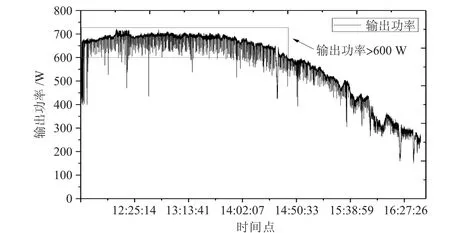
圖7 輸出功率隨時間的變化曲線
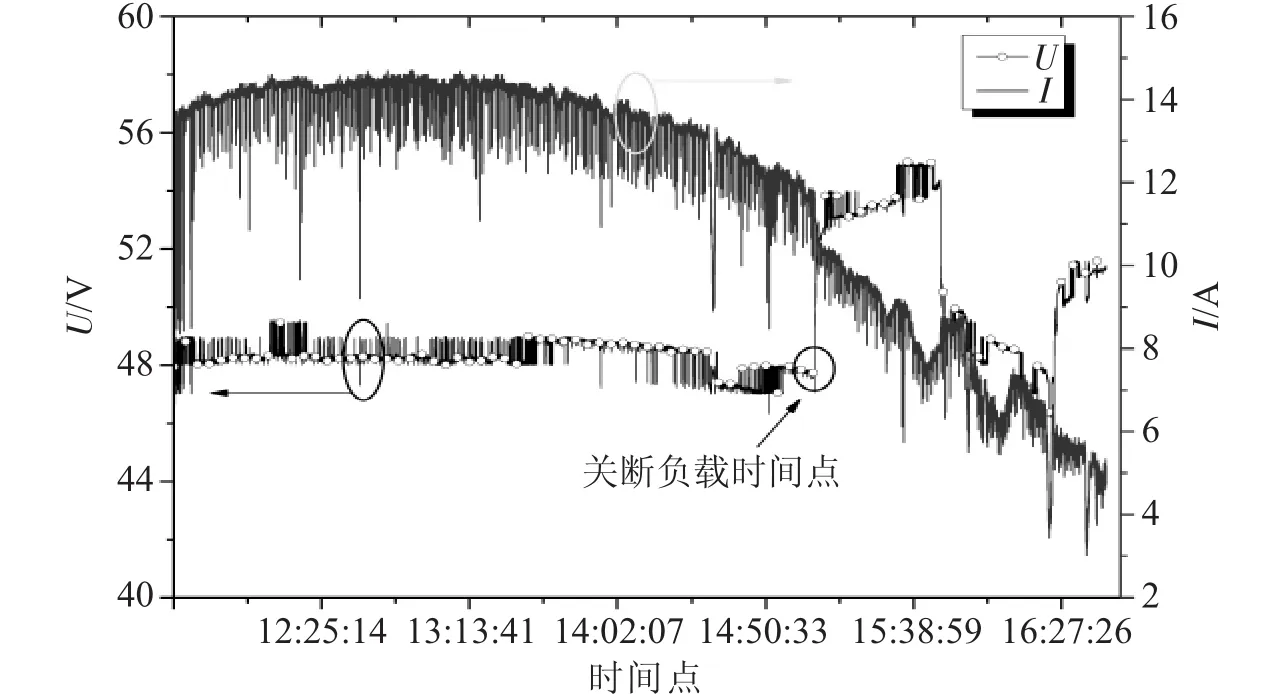
圖8 輸出電壓和輸出電流隨時間的變化曲線
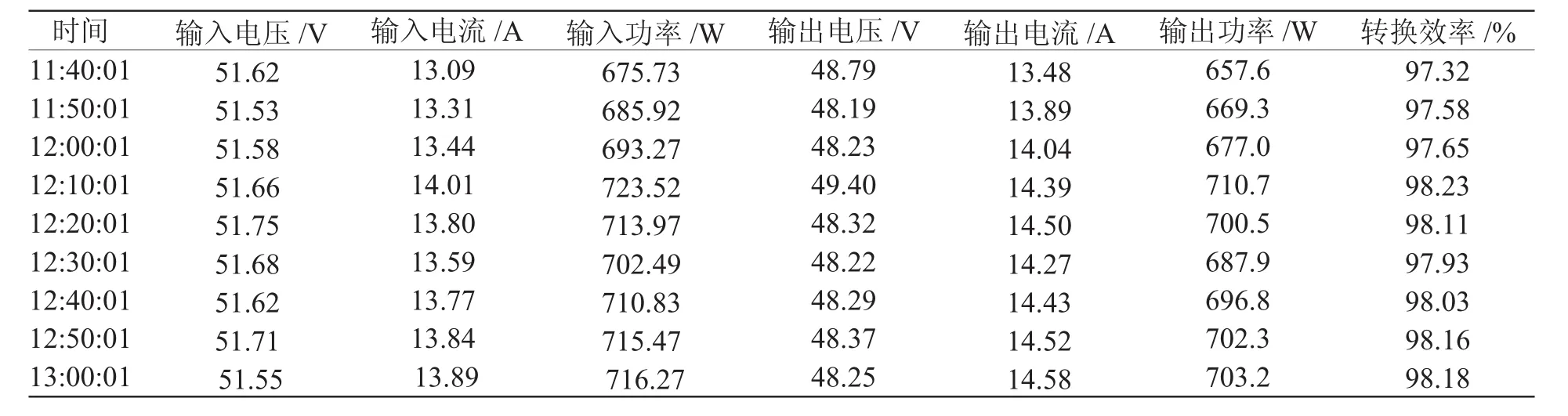
表1 能源控制器MPPT轉換效率測試
4 結束語
本文對太陽能無人機能源控制器的設計進行了詳細闡述,對太陽能無人機的能源系統在地面情況下發電與帶載運行情況進行了實驗驗證。該方案成功實現了對無人機能源系統中光伏陣列、儲能電池充放電管理功能,MPPT轉換效率在97%以上。該設備的研制可滿足未來太陽能無人機等工程需求,在臨近空間飛行器電源系統領域具有很好的應用前景。
[1] 鄧海強,余雄慶.太陽能飛機的現狀和發展趨勢[J].航空科學技術,2006,(1):28-30.
[2] 高廣林,李占科,宋筆鋒,等.太陽能無人機關鍵技術分析[J].飛行力學,2010,28(1):1-4.
[3] 趙輝杰,馬建超.小型太陽能無人機持久飛行技術研究[J].中國電子科學研究院學報,2013,8(4):384-387.
[4] 肖偉,周洲,王睿,等.分布式推進系統對太陽能無人機橫航向飛行品質的影響研究[J].西北工業大學學報,2012,30(6):868-872.
[5] 昌敏,周洲,成柯,等.高空駐留太陽能飛機主動式光伏組件面功率特性研究[J].航空學報,2013,34(2):273-281.
Research and Design of Power Management Controller of Solar Unmanned Aerial Vehicle
LU Yunzhang,GUO Jin,ZHOU Meng,ZHANG Jianguo,YANG Xiaosheng,ZHANG Jialiang
(The 48thResearch Institute of CETE,Changsha 410111,China)
The power management controller of the solar unmanned aerial vehicle (UAV)was introduced,and the energy systemhad been tested onthe ground condition.Maximum Power Point Tracking(MPPT)was chosen for the solar UAV energymanagement system,and the design had the ability of automatic managing the solar cell array power generation,battery charging.The designed power management system with great adaptabilityand performance was useful in the application ofUAV.
Solar unmanned aerial vehicle;Power management controller;Maximum power point tracking(MPPT)
TM914.4
A
1004-4507(2017)03-0045-06
2017-04-17
陸運章,男,1984年生,博士,工程師,主要從事無人機、飛艇等能源系統研究與開發工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
