經緯儀主鏡在支撐系統下的面形變化
2017-08-01 12:17:15趙天驕喬彥峰
中國光學 2017年4期
趙天驕, 喬彥峰, 孫 寧, 謝 軍
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
經緯儀主鏡在支撐系統下的面形變化
趙天驕1,2, 喬彥峰1*, 孫 寧1, 謝 軍1,2
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
為研究在重力作用下主鏡支撐系統對經緯儀主鏡處于不同工作角度時面形誤差的影響,以600 mm口徑主鏡為研究對象,利用Abaqus軟件分別建立了600 mm主鏡在加工狀態下和工作狀態下的有限元支撐模型,并進行了重力變形分析,然后借助4D干涉儀對在不同支撐系統下的主鏡進行相關的面形檢測。實驗結果表明,在吊帶支撐系統和主鏡室支撐系統下,主鏡的自身面形誤差RMS為16.18 nm和16.90 nm。利用有限元分析了理想狀態的主鏡在不同仰角工況下的面形誤差,結合主鏡自身的面形誤差,計算得到了主鏡面形誤差在光軸由水平變化到豎直的過程中逐漸變大,其RMS最大為19.58 nm,表明該主鏡室支撐系統具有良好支撐效果,可滿足工程要求,同時也驗證了主鏡室支撐系統有限元理論模型的準確性。
光電經緯儀;主反射鏡;支撐系統;有限元;面形檢測
1 引 言
光電經緯儀是一種典型的光電跟蹤測量設備,能夠實時準確地測量空中飛行目標的外彈道參數,同時記錄其飛行姿態[1],具有抗干擾能力強和測量精度高等優點。主反射鏡(主鏡)作為光電經緯儀光學系統中的重要部件[2],它的面形精度對成像質量的好壞起著關鍵性作用。隨著對反射鏡分辨能力和聚光能力的要求越來越高,不斷增大反射鏡口徑會使其面形精度更容易受到重力和環境溫度的影響[3],而合理的支撐結構可以有效減小反射鏡在不同工況下的面形變化[4]。近年來,國內諸多學者對大口徑主鏡的支撐結構展開了研究,戴曉林等[5]對8 m能動薄主鏡的側支撐進行優化設計,借助有限元計算提出了一種比傳統的push-pull-sheer支撐方式更簡單、效果更好的支撐方案。邵亮等[6]為2 m SiC輕質化主鏡設計了液壓whiffle-tree被動支撐系統,通過優化分配軸向支撐力提高了主鏡的面形精度。傘曉剛等[7]通過對1 m主鏡的支撐系統進行優化分析和面形檢測,驗證了軸向和徑向支撐的可行性。李宗軒等[8]對超大口徑主鏡的關鍵技術進行了詳細介紹,并根據國內技術條件提出了研制3.5 m口徑單塊式主鏡空間望遠鏡的設想。
對于中小型光電經緯儀而言,主鏡的支撐系統在加工和工作時是不同的。如在吊帶支撐系統下對600 mm的主鏡進行加工,當加工到面形精度的均方根(Root mean square, RMS)小于λ/40(λ為632.8 nm)時,將主鏡裝配到主鏡室支撐系統中。由于兩種支撐系統都只能在光軸水平時進行面形檢測,所以研究主鏡在不同工作角度時的面形精度就顯得尤為重要。
本文以某經緯儀中的600 mm主鏡為研究對象,根據其工作特點和設計指標要求確定了主鏡的支撐方式和支撐點位置,利用Abaqus軟件建立主鏡及支撐系統的有限元模型,并分別在加工支撐狀態和工作支撐狀態下對主鏡進行重力變形分析,結合面形檢測結果計算出主鏡在兩種支撐狀態下的自身面形誤差RMS值。最后計算600 mm主鏡在實際工作狀態下處于不同仰角時的面形誤差RMS值,驗證了主鏡室支撐系統的可行性。
2 主反射鏡參數
該主鏡的材料為微晶玻璃,材料參數如表1所示。它是通光口徑為600 mm的球面反射鏡,最大輪廓直徑為640 mm,中心孔直徑為144 mm,邊緣厚度為90 mm,曲率半徑為1 350 mm。

表1 主鏡的材料屬性Tab. 1 Material parameters of primary mirror
3 吊帶支撐系統
對加工狀態下的600 mm主鏡采用加工大口徑反射鏡常用的支撐方式——吊帶支撐,鋼帶作為柔性吊帶約束反射鏡在垂直光軸方向上的位移,包角取170°。圖1是利用Abaqus建立的有限元模型,主鏡和鋼帶采用六面體單元劃分,共劃分45 780個實體單元。對鋼帶上端的對稱固定約束進行分析,在重力作用下主鏡的位移變化云圖如圖2所示。
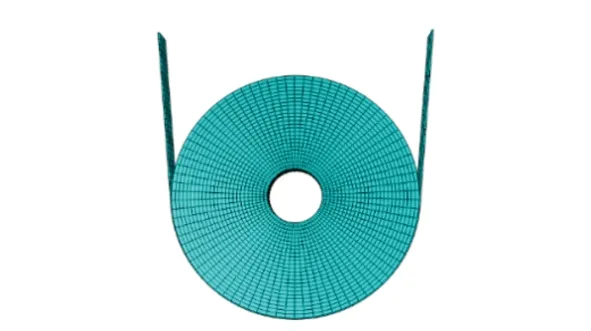
圖1 吊帶支撐的有限元模型Fig. 1 Finite element model of strip support

圖2 吊帶支撐下主鏡的位移變化云圖Fig. 2 Displacement pattern of primary mirror under strip support
從圖2可以看出,從主鏡底部邊緣到中心孔的過程中,主鏡的位移逐漸變小,這是由于主鏡邊緣與鋼帶接觸,相互作用力較大,導致其比中心位置處的位移大。利用Matlab對分析得到的主鏡鏡面節點坐標進行Zernike多項式擬合,可算得到主鏡的面形誤差RMS為2.52 nm。
4 主鏡室支撐系統
4.1 支撐方案
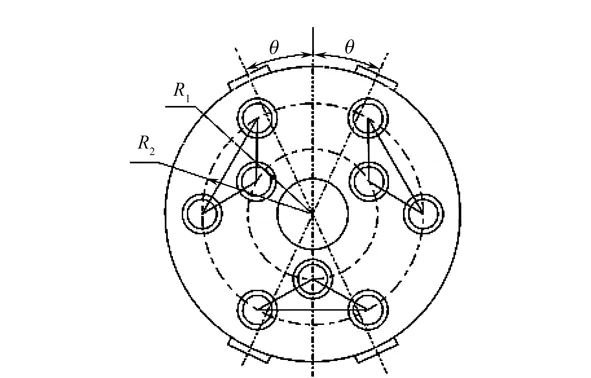
圖3 600 mm主鏡支撐結構排布方式Fig. 3 Support structure configuration of 600 mm primary mirror
在工作狀態下,采用常見的被動支撐方式對主鏡的軸向和徑向進行定位和支撐[9]。圖3是支撐結構排布示意圖,底支撐是典型的whiffle-tree浮動支撐形式。利用三點支撐原理,根據主鏡的尺寸將支撐點由3點擴展到9點(內環3點,外環6點),每個支撐點為環形支撐墊,他們通過剛性浮動三角支架連接起來,這樣的底支撐結構承載能力大,使主鏡在軸向上具有良好的穩定性。經過優化后,支撐內環的半徑R1=132 mm,支撐外環的半徑R2=262 mm[10-11]。將主鏡的中心軸定位,通過外邊緣重錘平衡杠桿浮動支撐機構實現對主鏡的徑向支撐。底部兩組側支撐使主鏡均勻配重,支撐盤中心線與豎直方向的偏角θ=25°。當主鏡處于不同的仰角時,各組側支撐對主鏡的支撐力隨光軸角度的變化而自動校正,從而與主鏡徑向的重力分力平衡[12]。
4.2 有限元模型的建立和分析
由于主鏡室的支撐結構較為復雜,先在UG中建立主鏡室支撐系統模型,在不影響有限元仿真結果的前提下簡化模型,將其導入到Abaqus軟件中進行仿真分析。為了保證計算結果的精確度,對導入的模型進行了網格收斂性分析。隨著網格密度增加,當支撐結構的剛體位移趨于不變時,說明網格已經收斂[13]。
該支撐系統主要由主鏡、軸向支撐、徑向支撐、前壓緊組件、底板及連接筒組成,有限元模型如圖4所示。主鏡室支撐結構的材料為鐵鎳合金4J32。為保證側支撐盤與主鏡之間有效接觸,他們之間采用橡膠墊隔開。支撐結構和橡膠墊的材料參數如表2所示。

圖4 主鏡室支撐系統的有限元模型Fig. 4 Finite element model of primary mirror chamber support system
在主鏡室的支撐模型中,每個支撐點都與主鏡接觸,但接觸是非線性的,為保證計算收斂,要對接觸部分的網格進行細化[14]。主鏡背部的環形支撐墊通過鋼球和彈簧與三角支撐板相連接,用分布耦合約束代替鋼球,彈簧使用彈簧單元。其他部分主要采用六面體單元離散,過渡區域和非分析區域使用四面體單元和楔形體單元離散,共劃分184 905個實體單元,最后對主鏡及支撐系統施加載荷和約束條件。分析在重力作用下,600 mm主鏡在理想狀態處于不同工作角度時的鏡面變形,圖5為光軸水平時主鏡的位移變化云圖。計算得到了主鏡光軸與水平方向的夾角α由0°變化到90°過程中的面形誤差變化曲線,如圖6所示。當α=0°時,主鏡光軸水平,此時主鏡的面形誤差RMS值最小,為2.99 nm;當α=90°時,主鏡光軸豎直,此時主鏡的面形誤差RMS值最大,為9.44 nm。
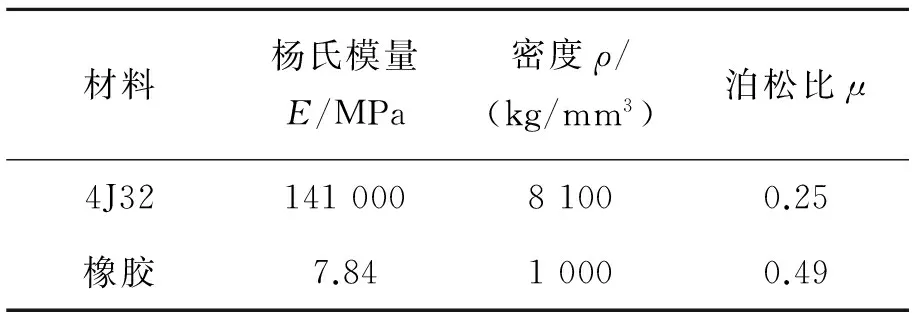
表2 鐵鎳合金4J32和橡膠的材料參數Tab. 2 Material parameters of iron-nickel alloy 4J32 and rubber

圖5 光軸水平時主鏡的位移變化云圖Fig. 5 Displacement pattern of primary mirror when optical axis is horizontal

圖6 不同仰角下主鏡的面形誤差RMSFig. 6 Surface deformation error RMS of primary mirror at different elevation angles
5 實驗及結果
利用4D干涉儀檢測600 mm主鏡在上述兩種支撐系統下的面形精度誤差,在吊帶支撐系統下檢測到的主鏡面形如圖7(a)所示,主鏡面形誤差RMS為17.07 nm。將主鏡安裝到主鏡室支撐系統后檢測到的主鏡面形如圖7(b)所示。由于試驗條件的限制,只能檢測到光軸處于水平狀態時的主鏡面形誤差,其RMS為17.91 nm。由支撐原理可知,吊帶支撐不及主鏡室支撐對主鏡面形的影響大[15],上述仿真分析結果和檢測結果都滿足這一規律。

圖7 (a)吊帶支撐系統下和(b)主鏡室支撐系統下檢測到的主鏡面形Fig. 7 Primary mirror surface tested at (a) strip support system and (b) primary mirror chamber support system
6 主鏡面形誤差分析
在直角坐標系下的主鏡面形誤差Zernike擬合多項式:
式中,ai為Zernike多項式中的第i項系數,fi為Zernike多項式中第i項,(x,y)為節點坐標值。這里主要考慮反射鏡自身面形誤差、重力作用以及支撐系統對主鏡面形精度的影響。有限元分析的反射鏡為理想鏡面,其面形結果只包括自重和支撐系統引起的誤差。根據各項誤差的不相關性,由面形檢測結果Z0與有限元分析結果Z1之間的關系,得到主鏡自身加工面形誤差的Zernike擬合多項式:

式中,bi為面形檢測Zernike多項式中的第i項系數,ci為有限元分析Zernike多項式的第i項系數。

圖8 主鏡在(a)吊帶支撐系統和(b)主鏡室支撐系統下的自身面形云圖Fig. 8 Surface deformation pattern of primary mirror at (a) strip support system and (b) mirror chamber support system
這樣就得到了表示主鏡自身面形精度的Zernike系數,提取前36項系數進行Zernike多項式擬合,就可以計算出600 mm主鏡在吊帶支撐系統和主鏡室支撐系統下的自身面形誤差RMS分別為16.18 nm和16.90 nm,兩者的RMS值相差4.35%,主鏡面形云圖如圖8(a)和(b)所示。主鏡在從吊帶支撐系統裝配到主鏡室支撐系統過程中,因為轉動使其徑向位置相對發生改變。但從圖中可以看出,主鏡在兩種支撐系統下對應位置的自身面形變形程度基本一致,表明通過上述方法得到的結果能夠真實地反映主鏡鏡面的自身面形誤差,并驗證了主鏡室支撐系統有限元模型的準確性。將前面有限元分析的600 mm主鏡在不同仰角下的面形誤差,與主鏡在主鏡室支撐系統下獲得的自身面形誤差結合起來進行Zernike多項式擬合,得到了反映主反射鏡在實際工作狀態下的面形精度,如圖9所示。可見,面形誤差RMS隨著主鏡仰角α的增大而逐漸增大,當主鏡光軸指向天頂時,其面形誤差達到最大,面形誤差RMS為19.58 nm,小于λ/30(λ=632.8 nm),說明在實際工作狀態下該主鏡室支撐系統引起的主鏡面形誤差滿足工程要求。另外,與圖6理想狀態下的主鏡面形誤差曲線相比,圖9中的主鏡面形誤差變化范圍明顯減小,這說明主鏡自身面形誤差對實際工作狀態下的面形誤差有較大影響。

圖9 主鏡在實際工作狀態下的面形誤差RMSFig. 9 Surface deformation error RMS of primary mirror in working state
7 結 論
借助吊帶支撐系統對600 mm主反射鏡進行加工,之后將其裝配到主鏡室支撐系統中。主鏡室支撐系統由9點whiffle-tree浮動軸向支撐結構(內環3點,外環6點)和4組重錘平衡杠桿徑向支撐機構組成。經有限元分析得到了理想主鏡光軸水平時在吊帶支撐系統和主鏡室支撐系統下的面形誤差RMS分別為2.52 nm 和2.99 nm。利用4D干涉儀檢測得到了主鏡在加工狀態下的面形誤差RMS為17.07nm,放到主鏡室中其RMS為17.91 nm。最后分離出主鏡在這兩種支撐系統下的鏡面自身面形精度RMS分別為16.18 nm和16.90 nm;同時,主鏡在兩種支撐系統下對應位置的自身面形變形程度基本一致,說明計算結果可靠,證明了建立的600 mm主鏡室支撐系統模型的準確性。主鏡光軸在由水平變化到豎直過程中,主鏡在實際工作狀態下的面形精度RMS最大為19.58 nm(光軸豎直),可滿足工程要求,驗證了該主鏡室支撐系統具有良好的支撐效果。
[1] 趙學顏,李迎春. 靶場光學測量[D]. 北京:裝備指揮技術學院,2001. ZHAO X Y,LI Y CH. Range optical measurement[D]. Beijing:TheAcademyofEquipmentCommand&Technology,2001. (in Chinese)
[2] 馬品仲. 大型天文望遠鏡設計和研究[J]. 應用光學,1994,15(3):6-11. MA P ZH. Design and study on the large astronomical telescope[J].AppliedOptics,1994,15(3):6-11. (in Chinese)
[3] 楊佳林,黃巧文. 大口徑反射鏡結構參數優化設計[J]. 中國空間科學技術,2011(4):77-33. YANG J L,HUANG Q W. Optimized design of structure parameters for large aperture mirrors [J].ChineseSpaceScienceandTechnology,2001(4):77-83. (in Chinese)
[4] 李福,阮萍,趙葆常. 重力作用下平面反射鏡變形研究[J]. 光子學報,2005,34(2):272-275. LI F,RUAN P,ZHAO B CH. Study on the surface deformation of flat reflector under gravity load[J].ActaPhotonicaSinica,2005,34(2):272-275. (in Chinese)
[5] 戴曉霖,鮮浩,唐金龍,等. 8 m能動薄主鏡側支撐設計[J]. 光學學報,2015,35(6):255-262. DAI X L,XIAN H,TANG J L,etal.. Designing of lateral support system for an 8 m active thin mirror[J].ActaOpticalSinica,2015,35(6):255-262. (in Chinese)
[6] 邵亮,吳小霞,楊飛,等. SiC輕量化主鏡液壓whiffletree支撐系統的改進[J]. 紅外與激光工程,2014,43(11):3820-3824. SHAO L,WU X X,YANG F,etal.. Improvement on hydraulic whiffletree support system for SiC lightweight primary mirror[J].Infrared&LaserEngineering,2014,43(11):3820-3824. (in Chinese)
[7] 傘曉剛,孫寧,卓仁善,等. 大口徑光電經緯儀主反射鏡支撐結構設計[J]. 光學 精密工程,2013,21(12):3111-3117. SAN X G,SUN N,ZHUO R SH,etal.. Design of supporting structure for primary mirror of large aperture theodolite[J].OpticsandPrecisionEngineering,2013,21(12):3111-3117. (in Chinese)
[8] 李宗軒,金光,張雷,等. 3.5 m口徑空間望遠鏡單塊式主鏡技術展望[J]. 中國光學,2014,7(4):532-541. LI Z X,JIN G,ZHANG L,etal.. Overview and outlook of monolithic primary mirror of spaceborne telescope with 3.5 m aperture[J].ChineseOptics,2014,7(4):532-541. (in Chinese)
[9] 張景旭. 地基大口徑望遠鏡系統結構技術綜述[J]. 中國光學,2012,5(4):327-336. ZHANG J X. Overview of structure technologies of large aperture ground-based telescopes[J].ChineseOptics,2012,5(4):327-336. (in Chinese)
[10] 吳小霞,楊洪波,張景旭,等. 大口徑球面鏡支撐系統的優化設計[J]. 光子學報,2009,38(1):129-132. WU X X,YANG H B,ZHANG J X,etal.. Optimal design of support system for the large-aperture sphere mirror[J].ActaPhotonicaSinica,2009,38(1):129-132. (in Chinese)
[11] 王富國,楊洪波,楊飛,等. 大口徑主鏡軸向支撐點位置優化分析[J]. 紅外與激光工程,2007,36(6):877-880. WANG F G,Yang H B,YANG F,etal.. Optimization and analysis for the axis support points position of the large aperture mirrors[J].Infrared&LaserEngineering,2007,36(6):877-880. (in Chinese)
[12] 范李立,張景旭,姜皓,等. 極軸式望遠鏡主鏡支撐設計[J]. 紅外與激光工程,2011,40(3):476-479. FAN L,ZHANG J X,JIANG H,etal.. Design of the primary mirror support of equatorial telescope[J].Infrared&LaserEngineering,2011,40(3):476-479. (in Chinese)
[13] 莊茁,由小川,廖劍暉,等. 基于ABAQUS的有限元分析和應用[M]. 北京:清華大學出版社,2011. ZHUANG ZH,YOU X CH,LIAO J H,etal..BasedonABAQUSfiniteelementanalysisandapplication[M]. Beijing:Tsinghua Unversity Press,2011. (in Chinese)
[14] 謝軍,曹立華,韓光宇,等. 考慮接觸邊界條件的經緯儀主鏡面形誤差分析[J]. 光子學報,2014,43(12):1212004. XIE J,CAO L H,HAN G Y,etal.. The surface error analysis of theodolite primary mirror considering boundary condition[J].ActaPhotonicaSinica,2014,43(12):1212004. (in Chinese)
[15] 邵亮,吳小霞,陳寶剛,等. SiC輕量化主鏡的被動支撐系統[J]. 光學 精密工程,2015,23(5):1380-1386. SHAO L,WU X X,CHEN B G,etal.. Passive support system of light-weighted SiC primary mirror[J].OpticsandPrecisionEngineering,2015,23(5):1380-1386. (in Chinese)
Surface deformation of theodolite primary mirrorunder the support system
ZHAO Tian-jiao1,2, QIAO Yan-feng1*, SUN Ning1, XIE Jun1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033 China;2.University of Chinese Academy of Sciences,Beijing 100049,China)*Corresponding author, E-mail:qiaoyf@ciomp.ac.cn
In order to study the effect of support system on surface deformation error of theodolite primary mirror at different working angles under gravity, the 600 mm primary mirror finite element support models in processing state and working state are built using Abaqus software, and the gravity deformation analysis of the primary mirror is also carried out. Then, the related surface deformation tests of the primary mirror at different support systems are carried out using 4D interferometer. As a result, the surface deformation errors RMS of the primary mirror at strip support system and mirror room support system are 16.18 nm and 16.90 nm, respectively. The surface deformation errors of ideal primary mirror in varied elevation angles are analyzed by the finite element method. Combining with the surface deformation error in itself, it is found that the surface deformation error of the primary mirror increases gradually in the process of the optical axis changing from horizontal direction to vertical direction, and the maximum RMS is 19.58 nm. This shows the primary mirror chamber support system has an excellent supporting performance and can satisfy the engineering requirements. It is also verified that the finite element theoretical model of the primary mirror chamber support system is accurate.
photoelectric theodolite;primary mirror;support system;finite element;surface deformation test
2017-02-20;
2017-04-03
國家自然科學基金項目(No.51275504) Supported by National Natural Science Foundation of China (No. 51275504)
2095-1531(2017)04-0477-07
TH743
A
10.3788/CO.20171004. 0477

趙天驕(1991—),女,吉林長春人,碩士研究生,主要從事主鏡支撐系統設計與仿真分析的研究。E-mail: zhaotjhit@163.com

喬彥峰(1962—),男,吉林長春人,研究員,博士生導師,主要從事光電測量方面的研究。E-mail: qiaoyf@ciomp.ac.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18