空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法
2017-08-11 23:16:44王興龍周志成曲廣吉
宇航學(xué)報(bào) 2017年7期
王興龍,周志成,曲廣吉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
?
空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法
王興龍,周志成,曲廣吉
(中國(guó)空間技術(shù)研究院通信衛(wèi)星事業(yè)部,北京 100094)
針對(duì)航天器在軌服務(wù)體系技術(shù)的發(fā)展需求,提出一種空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法。在系統(tǒng)設(shè)定和工程模化的基礎(chǔ)上,首先推導(dǎo)了空間機(jī)械臂捕獲目標(biāo)的動(dòng)力學(xué)模型和速度增益矩陣;然后重點(diǎn)研究了速度增益矩陣的動(dòng)態(tài)調(diào)整方法,并以此為基礎(chǔ)設(shè)計(jì)了空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法;最后通過工程算例在MATLAB和ADAMS聯(lián)合仿真平臺(tái)上驗(yàn)證了該方法的有效性。仿真結(jié)果表明,該方法既能有效減少捕獲時(shí)間,又能防止過大的起始和殘余速度,同時(shí)還能回避雅克比矩陣奇異問題,可以滿足機(jī)械臂末端對(duì)失穩(wěn)目標(biāo)相對(duì)位姿同步跟蹤的捕獲任務(wù)要求,具有工程實(shí)用性。
空間機(jī)械臂;目標(biāo)捕獲;速度增益;軌跡規(guī)劃
0 引 言
空間機(jī)械臂技術(shù)[1-2]是航天器在軌服務(wù)體系的核心技術(shù)之一[3]。服務(wù)衛(wèi)星通過空間機(jī)械臂完成對(duì)失穩(wěn)目標(biāo)衛(wèi)星的捕獲連接,在此基礎(chǔ)上進(jìn)一步進(jìn)行故障修復(fù)等在軌服務(wù)操作。對(duì)于GEO通信衛(wèi)星等大型衛(wèi)星平臺(tái),姿態(tài)失穩(wěn)后因其殘余角速度和擾動(dòng)等因素使衛(wèi)星處于慢旋或翻滾狀態(tài),機(jī)械臂捕獲操作存在捕獲窗口且時(shí)間限制較緊。
對(duì)于該類失穩(wěn)目標(biāo)的捕獲任務(wù),空間機(jī)械臂如何在盡可能短的時(shí)間內(nèi)實(shí)現(xiàn)其末端對(duì)目標(biāo)的相對(duì)位姿同步跟蹤,同時(shí)保證一定的跟蹤精度成為一項(xiàng)亟待解決的關(guān)鍵技術(shù)問題。Nagamatsu等[4]提出了一種通過空間機(jī)械臂救援翻滾衛(wèi)星的捕獲策略,但在捕獲前要求服務(wù)星保持與目標(biāo)星同步旋轉(zhuǎn),對(duì)服務(wù)星姿態(tài)控制要求較高。洪炳熔等[5]采用分解運(yùn)動(dòng)速度控制提出了空間機(jī)器人捕捉運(yùn)動(dòng)目標(biāo)的力矩控制算法,在平滑捕獲目標(biāo)的同時(shí)保持基座穩(wěn)定,但對(duì)捕獲過程中的軌跡規(guī)劃問題未作深入研究。趙曉東等[6]采用多項(xiàng)式差值方法進(jìn)行空間機(jī)械臂軌跡規(guī)劃,但其本質(zhì)是一種開環(huán)控制方法,且需假設(shè)目標(biāo)的運(yùn)動(dòng)軌跡已知。韓艷鏵[7]在非慣性系下建立了機(jī)械臂抓取目標(biāo)的動(dòng)力學(xué)模型,設(shè)計(jì)尋的制導(dǎo)控制律完成目標(biāo)捕獲,但未考慮“規(guī)劃+控制”模式下非慣性系對(duì)目標(biāo)捕獲動(dòng)力學(xué)與控制的影響。
空間機(jī)械臂利用視覺反饋獲取其末端與失穩(wěn)目標(biāo)之間的相對(duì)位置和姿態(tài)信息,以此為基礎(chǔ)規(guī)劃相對(duì)速度和角速度。在以往研究中[8-9],速度增益矩陣通常為常值,雖算法簡(jiǎn)單,但無法同時(shí)滿足平滑啟動(dòng)、捕獲時(shí)間和跟蹤精度等多方面要求。為避免機(jī)械臂啟動(dòng)時(shí)相對(duì)位姿誤差較大可能導(dǎo)致的關(guān)節(jié)角速度過大問題,徐拴鋒等[10]和徐文福等[11]分別采用位姿誤差反饋系數(shù)和三次多項(xiàng)式對(duì)速度增益矩陣進(jìn)行調(diào)整,但都未考慮中間階段捕獲時(shí)間限制,也未考慮臨近捕獲時(shí)相對(duì)位置和速度誤差同時(shí)收斂問題。
本文提出一種空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法。建立系統(tǒng)動(dòng)力學(xué)模型并分析常值速度增益矩陣存在的問題,采用線性規(guī)劃對(duì)速度增益矩陣和關(guān)節(jié)角速度進(jìn)行實(shí)時(shí)計(jì)算和動(dòng)態(tài)調(diào)整,進(jìn)而設(shè)計(jì)機(jī)械臂捕獲目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法。最后通過仿真校驗(yàn),檢驗(yàn)該方法的有效性,并對(duì)其優(yōu)缺點(diǎn)進(jìn)行分析。
1 空間機(jī)械臂捕獲失穩(wěn)目標(biāo)動(dòng)力學(xué)建模
1.1 系統(tǒng)設(shè)定和符號(hào)定義
首先建立空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)力學(xué)模型,并由此導(dǎo)出速度增益矩陣。根據(jù)工程模化思想,對(duì)論文所研究的系統(tǒng)工況設(shè)定如下:
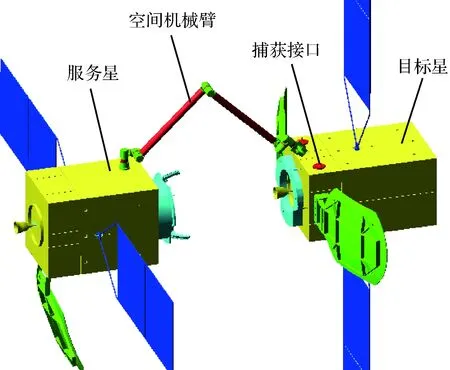
圖1 空間機(jī)械臂捕獲目標(biāo)示意圖Fig.1 Illustration of space manipulator for capturing a target
如圖1所示,整個(gè)系統(tǒng)包括服務(wù)星和目標(biāo)星兩顆衛(wèi)星,服務(wù)星裝有空間機(jī)械臂,目標(biāo)星裝有捕獲接口。目標(biāo)星處于失穩(wěn)狀態(tài),在內(nèi)部能量耗散作用下繞自身最大慣量軸慢旋,捕獲接口隨星體作旋轉(zhuǎn)運(yùn)動(dòng)。服務(wù)星懸停于目標(biāo)星-V-bar方向,相對(duì)距離小于5 m,目標(biāo)星捕獲接口的運(yùn)動(dòng)軌跡與機(jī)械臂工作空間相交。服務(wù)星姿軌控系統(tǒng)正常工作,空間機(jī)械臂工作在基座位姿受控模式。
根據(jù)相對(duì)位姿測(cè)量信息,實(shí)時(shí)規(guī)劃空間機(jī)械臂的運(yùn)動(dòng)軌跡,實(shí)現(xiàn)機(jī)械臂末端對(duì)捕獲接口的相對(duì)位姿同步跟蹤,以減小捕獲時(shí)的碰撞沖擊。動(dòng)力學(xué)建模所用坐標(biāo)系和基本符號(hào)定義如表1所示,文中所有矢量均用其在慣性系I中的坐標(biāo)分量表示。
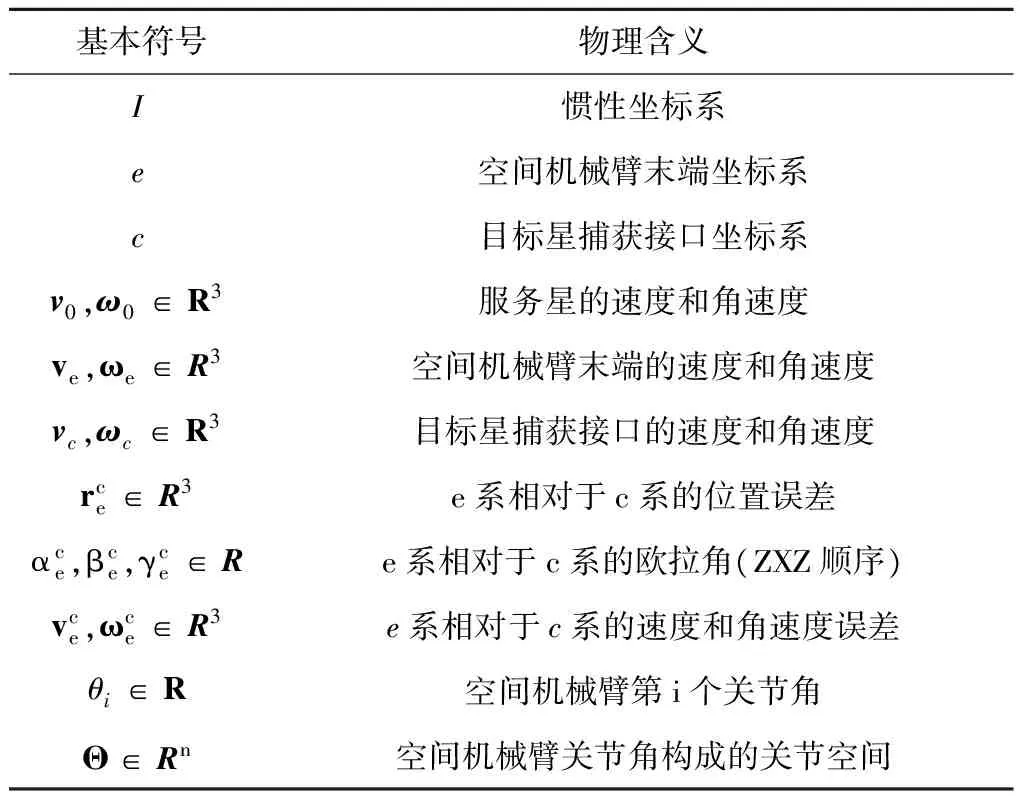
表1 動(dòng)力學(xué)建模基本符號(hào)
1.2 動(dòng)力學(xué)模型和速度增益矩陣

(1)
式中:Js∈R6×6為服務(wù)星運(yùn)動(dòng)相關(guān)的雅克比矩陣,Jm∈R6×n為機(jī)械臂運(yùn)動(dòng)相關(guān)的雅克比矩陣。
傳統(tǒng)目標(biāo)捕獲軌跡規(guī)劃方法中[9],空間機(jī)械臂末端的期望速度ved和期望角速度ωed按下式規(guī)劃
(2)

(3)

(4)
式(2)中,K∈R6×6稱為速度增益矩陣,一般取正常值對(duì)角陣,且可以寫成如下形式
(5)
式中:Kv=diag(kv,kv,kv),Kω=diag(kω,kω,kω)分別為線速度和角速度增益矩陣,對(duì)角線元素取值相等是為保證相對(duì)速度始終沿相對(duì)位置的直線方向。

(6)



2 速度增益矩陣動(dòng)態(tài)調(diào)整方法
設(shè)空間機(jī)械臂關(guān)節(jié)角速度的上下限分別為
(7)

(8)
式中:
(9)
將K(t)寫成式(5)所示形式,同時(shí)令
(10)
式中:ri(t),oi(t),Vi(t)∈R,Ji(t)∈R1×n。可將式(8)寫成展開形式
(11)
(12))
(13)

(kv(t)+kω(t))
(14)
線性規(guī)劃的目標(biāo)函數(shù)Q可取為
(15)
式中:ηv和ηω分別為線速度和角速度的權(quán)重系數(shù),用以調(diào)節(jié)規(guī)劃結(jié)果中kv(t)和kω(t)的權(quán)重。

設(shè)空間機(jī)械臂對(duì)失穩(wěn)目標(biāo)捕獲操作的初始時(shí)刻t0=0,在結(jié)束時(shí)刻tf,其相對(duì)的位置、姿態(tài)、速度和角速度誤差的精度要求分別為
(16)
將整個(gè)捕獲過程[0,tf]分為三個(gè)階段:1)平滑啟動(dòng)階段[0,t1),機(jī)械臂關(guān)節(jié)平滑啟動(dòng),使其末端速度從初值遞增至沿相對(duì)直線方向所能達(dá)到的最大值;2)快速逼近階段[t1,t2),機(jī)械臂末端以最大速度快速逼近目標(biāo),以盡可能減少捕獲時(shí)間;3)臨近捕獲階段[t2,tf],機(jī)械臂減速,使相對(duì)位姿和速度誤差在結(jié)束時(shí)刻tf同時(shí)收斂至指定精度。

(17)

1)初始時(shí)刻

2)平滑啟動(dòng)階段

(18)
3)快速逼近階段
(19)
4)臨近捕獲階段
結(jié)束時(shí)刻tf,根據(jù)位置級(jí)和速度級(jí)相對(duì)誤差同時(shí)收斂至指定精度的要求,令
(20)
則K在結(jié)束時(shí)刻tf的取值要求K(tf)為
(21)
式中:Kvf=diag(kvf,kvf,kvf),Kωf=diag(kωf,kωf,kωf)。

(22)
(23)


3 機(jī)械臂捕獲目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法
基于速度增益矩陣動(dòng)態(tài)調(diào)整方法,空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法如圖2所示。

圖2 空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的動(dòng)態(tài)軌跡規(guī)劃方法流程圖Fig.2 Flow chart of dynamic trajectory planning method of space manipulator for capturing a tumbling target
動(dòng)態(tài)軌跡規(guī)劃方法具體步驟如下:

步驟6:若k=kmax,表明循環(huán)次數(shù)已到達(dá)規(guī)定的最大值,始終無法滿足捕獲條件,捕獲任務(wù)失敗,重置空間機(jī)械臂,結(jié)束當(dāng)前捕獲操作。

步驟8:若是,表明已實(shí)現(xiàn)機(jī)械臂末端對(duì)失穩(wěn)目標(biāo)的相對(duì)位姿同步跟蹤,發(fā)出指令使機(jī)械臂成功捕獲目標(biāo),令kf=k,捕獲任務(wù)結(jié)束。
4 仿真校驗(yàn)
4.1 工程算例
通過工程算例在MATLAB和ADAMS聯(lián)合仿真平臺(tái)上進(jìn)行仿真,校驗(yàn)本文軌跡規(guī)劃方法的有效性。服務(wù)星和目標(biāo)星設(shè)定采用某成熟型號(hào)衛(wèi)星平臺(tái)。機(jī)械臂設(shè)定為空間7自由度機(jī)械臂,整體構(gòu)型與國(guó)際空間站遙控機(jī)械臂系統(tǒng)相同。空間機(jī)械臂坐標(biāo)系采用傳統(tǒng)D-H建模方法,如圖3所示。D-H參數(shù)如表2所示,動(dòng)力學(xué)參數(shù)如表3所示。空間機(jī)械臂末端坐標(biāo)系e與臂桿坐標(biāo)系7重合。
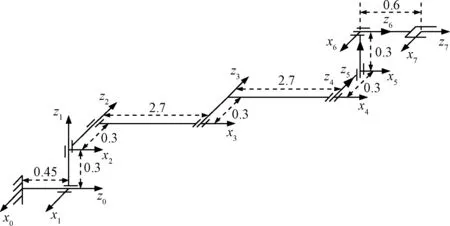
圖3 空間7自由度機(jī)械臂D-H坐標(biāo)系Fig.3 D-H frames of 7-dof space manipulator

臂桿iθi/(°)αi/(°)ai/mdi/m1θ19000.452θ2-9000.33θ302.70.34θ402.70.35θ59000.36θ6-9000.37θ7000.6

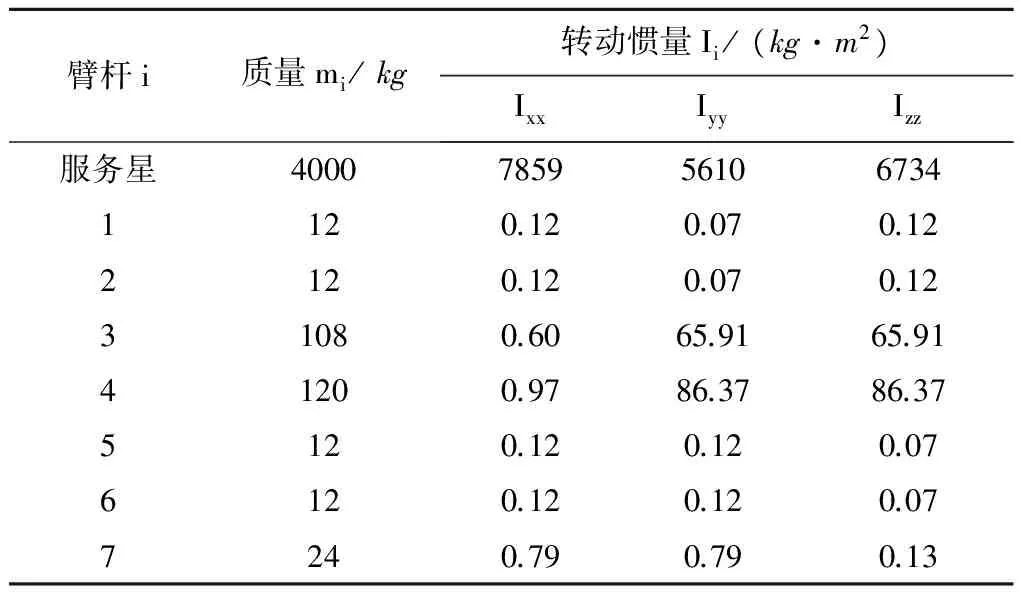
表3 空間機(jī)械臂動(dòng)力學(xué)參數(shù)
4.2 仿真結(jié)果
MATLAB與ADAMS聯(lián)合仿真得到的線速度增益矩陣Kv曲線和角速度增益矩陣Kω曲線分別如圖4和圖5所示。從圖4~5可以看出,速度增益矩陣Kv和Kω的變化曲線明顯呈三個(gè)階段。平滑啟動(dòng)階段,從初值近似呈線性遞增;快速逼近階段,按當(dāng)前方向的最大值快速增加;臨近捕獲階段,線性遞減,在捕獲結(jié)束時(shí)刻(tf=16 s)減為指定值Kvf和Kωf。
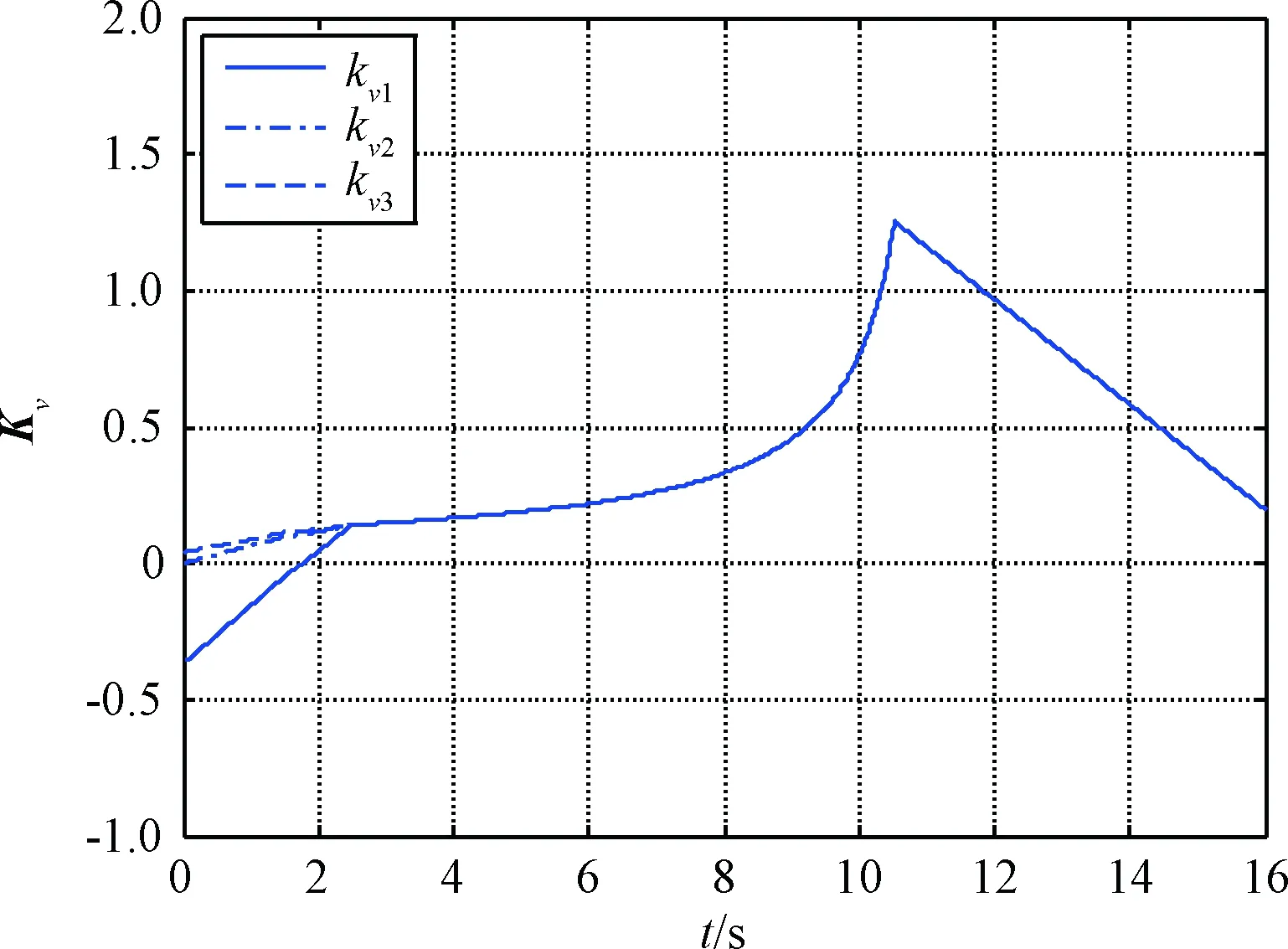
圖4 線速度增益矩陣曲線Fig.4 Curves of linear velocity gain matrix

圖5 角速度增益矩陣曲線Fig.5 Curves of angular velocity gain matrix
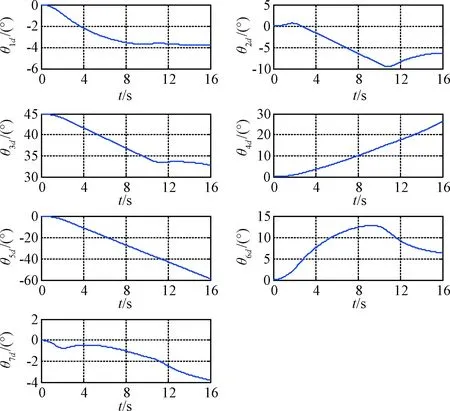
圖6 空間機(jī)械臂關(guān)節(jié)角度曲線Fig.6 Curves of joint angle of space manipulator
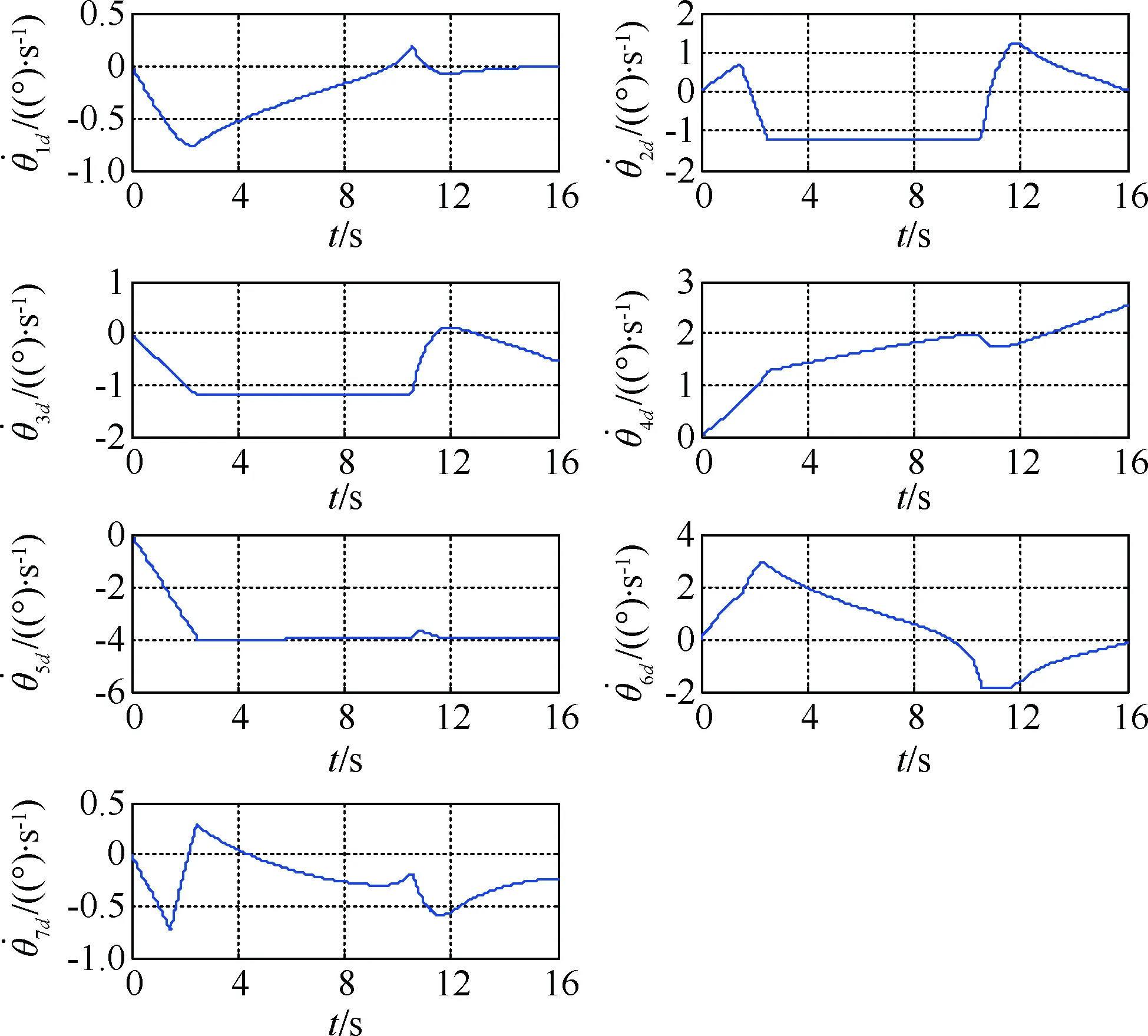
圖7 空間機(jī)械臂關(guān)節(jié)角速度曲線Fig.7 Curves of joint angular velocity of space manipulator
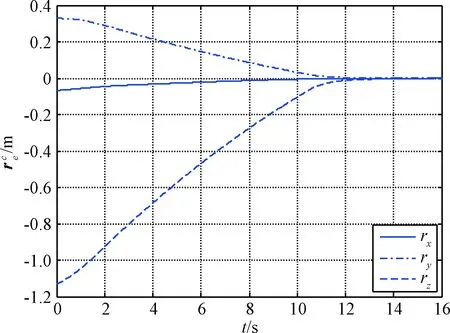
圖8 相對(duì)位置誤差曲線Fig.8 Curves of relative position error
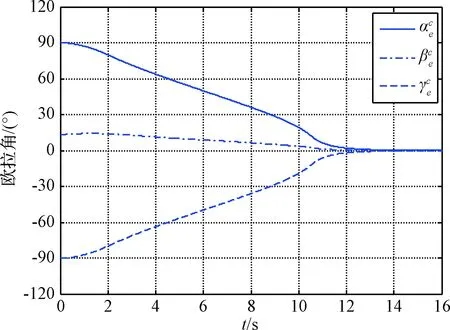
圖9 相對(duì)姿態(tài)誤差曲線Fig.9 Curves of relative attitude error
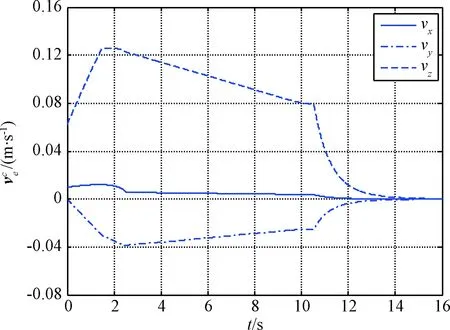
圖10 相對(duì)線速度誤差曲線Fig.10 Curves of relative linear velocity error
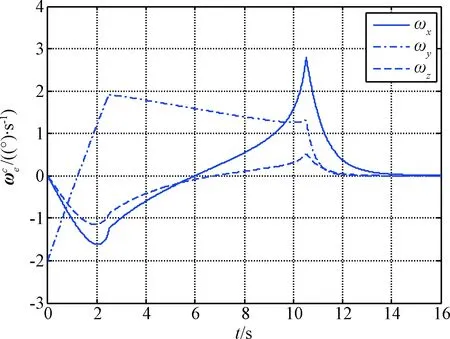
圖11 相對(duì)角速度誤差曲線Fig.11 Curves of relative angular velocity error
5 結(jié) 論
本文針對(duì)空間機(jī)械臂捕獲失穩(wěn)目標(biāo)問題,提出一種動(dòng)態(tài)軌跡規(guī)劃方法。仿真結(jié)果表明,該方法有效可行,能夠滿足機(jī)械臂末端對(duì)失穩(wěn)目標(biāo)相對(duì)位姿同步跟蹤的捕獲任務(wù)要求。該方法具有以下特點(diǎn):1)能夠使機(jī)械臂快速逼近失穩(wěn)目標(biāo),有效減少捕獲時(shí)間;2)保證機(jī)械臂平滑啟動(dòng),避免起始速度過大問題;3)保證位置級(jí)和速度級(jí)相對(duì)誤差同時(shí)收斂至指定精度,避免殘余速度過大問題;4)避免逆運(yùn)動(dòng)學(xué)計(jì)算,有效解決雅克比矩陣奇異問題。
應(yīng)指出,該方法還存在一定問題,如計(jì)算量較大,目標(biāo)跟蹤時(shí)延較長(zhǎng);速度曲線不夠光滑,階段轉(zhuǎn)換處變化較為劇烈,容易引起較大的跟蹤誤差等,需進(jìn)一步研究解決。本文研究結(jié)果可為空間機(jī)械臂捕獲失穩(wěn)目標(biāo)的工程實(shí)施提供一定的理論參考。
[1] 周志成, 曲廣吉. 通信衛(wèi)星總體設(shè)計(jì)和動(dòng)力學(xué)分析[M]. 北京:中國(guó)科學(xué)技術(shù)出版社, 2012.
[2] 于登云, 孫京, 馬興瑞. 空間機(jī)械臂技術(shù)及發(fā)展建議[J]. 航天器工程, 2007, 16(4): 1-8. [YuDeng-yun,SunJing,MaXing-rui.SuggestionondevelopmentofChinesespacemanipulatortechnology[J].SpacecraftEngineering, 2007, 16(4): 1-8.]
[3] 梁斌, 徐文福, 李成, 等. 地球靜止軌道在軌服務(wù)技術(shù)研究現(xiàn)狀與發(fā)展趨勢(shì)[J]. 宇航學(xué)報(bào), 2010, 31(1): 1-13. [LiangBin,XuWen-fu,LiCheng,etal.Thestatusandprospectoforbitalservicinginthegeostationaryorbit[J].JournalofAstronautics, 2010, 31(1): 1-13.]
[4]NagamatsuH,KubotaT,NakataniI.Capturestrategyforretrievalofatumblingsatellitebyaspaceroboticmanipulator[C].InternationalConferenceonRoboticsandAutomation,Minneapolis,USA,April28-30, 1996.
[5] 洪炳熔, 柳長(zhǎng)安, 李華忠. 自由飛行空間機(jī)器人捕捉運(yùn)動(dòng)目標(biāo)的力矩控制算法及其仿真[J]. 宇航學(xué)報(bào), 2000, 21(4): 64-69. [HongBing-rong,LiuChang-an,LiHua-zhong.Torquecontrolalgorithmforfreeflyingspacerobotscapturingamovingtargetanditssimulation[J].JournalofAstronautics, 2000, 21(4): 64-69.]
[6] 趙曉東, 王樹國(guó), 嚴(yán)艷軍, 等. 基于軌跡規(guī)劃的自由漂浮空間機(jī)器人抓取運(yùn)動(dòng)物體的研究[J]. 宇航學(xué)報(bào), 2002, 23(3): 48-51. [ZhaoXiao-dong,WangShu-guo,YanYan-jun,etal.Algorithmofcapturingatamovingbodyforafree-floatingspacemanipulatorbasedontrajectoryplanning[J].JournalofAstronautics, 2002, 23(3): 48-51.]
[7] 韓艷鏵. 空間機(jī)械臂抓取目標(biāo)動(dòng)力學(xué)與尋的制導(dǎo)控制[J]. 宇航學(xué)報(bào), 2016, 37(9): 1098-1106. [HanYan-hua.Dynamicsandhomingguidanceforspacemanipulatorcapturingon-orbittarget[J].JournalofAstronautics, 2016, 37(9): 1098-1106.]
[8]InabaN,OdaM,HayashiM.Visualservoingofspacerobotforautonomoussatellitecapture[J].JapanSocietyofAeronauticalSpaceSciencesTransactions, 2004, 46(153): 173-179.
[9] 徐文福. 空間機(jī)器人目標(biāo)捕獲的路徑規(guī)劃與實(shí)驗(yàn)研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué), 2007. [XuWen-fu.Pathplanningandexperimentstudyofspacerobotfortargetcapturing[D].Harbin:HarbinInstituteofTechnology, 2007.]
[10] 徐拴鋒, 楊保華, 張篤周, 等. 面向非合作目標(biāo)抓捕的機(jī)械臂軌跡規(guī)劃方法[J]. 中國(guó)空間科學(xué)技術(shù), 2014, 8(4): 8-15. [XuShuan-feng,YangBao-hua,ZhangDu-zhou,etal.Trajectoryplanningalgorithmformanipulatorscapturingnon-cooperativeobjects[J].ChineseSpaceScienceandTechnology, 2014, 8(4): 8-15.]
[11] 徐文福, 李成, 梁斌, 等. 空間機(jī)器人捕獲運(yùn)動(dòng)目標(biāo)的協(xié)調(diào)規(guī)劃與控制方法[J]. 自動(dòng)化學(xué)報(bào), 2009, 35(9): 1216-1225. [XuWen-fu,LiCheng,LiangBin,etal.Coordinatedplanningandcontrolmethodofspacerobotforcapturingmovingtarget[J].ActaAutomaticaSinica, 2009, 35(9): 1216-1225.]
通信地址:北京市5142信箱317分箱(100094)
電話:13811616124
E-mail:wangxinglong1987@163.com
Dynamic Trajectory Planning Method of Space Manipulator for Capturing a Tumbling Target
WANG Xing-long, ZHOU Zhi-cheng, QU Guang-ji
(Institute of Telecommunication Satellite, China Academy of Space Technology, Beijing 100094, China)
In order to meet the development requirement of spacecraft on-orbit service system technology, a dynamic trajectory planning method of a space manipulator for capturing a tumbling target is proposed in this paper. Firstly, on the basis of the system assumptions, the dynamics model and the velocity gain matrix of the space manipulator for capturing a target are derived. Then, the dynamic regulation method of the velocity gain matrix is presented. Furthermore, the dynamic trajectory planning method of the space manipulator is developed in detail. Finally, the effectiveness of the method is verified by a numerical simulation performed with MATLAB and ADAMS. The results illustrate that the proposed method can not only reduce the capturing time but also prevent the excessive starting and residual velocities, as well as avoiding the singularity of the Jacobian matrix. The method is practical in engineering for a space manipulator to capture a tumbling target.
Space manipulator; Target capturing; Velocity gain; Trajectory planning
2016-11-16;
2017-05-04
國(guó)家自然科學(xué)基金(11272334)
TP241
A
1000-1328(2017)07-0678-08
10.3873/j.issn.1000-1328.2017.07.000
王興龍(1987-),男,博士生,主要從事航天器總體設(shè)計(jì)、航天器動(dòng)力學(xué)與控制等研究。
猜你喜歡
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
