用于超級黑板的可抗震型光電定位系統設計
2017-08-30 18:28:29章佳輝郭華亮徐志宇趙明巖
自動化儀表 2017年8期
關鍵詞:測量
章佳輝,郭華亮,徐志宇,趙明巖
(1.同濟大學電子與信息工程學院,上海 201804;2.博洛尼亞大學電氣電子與信息工程學院,博洛尼亞 40136;3.華東理工大學信息科學與工程學院,上海 200237;4.中國計量大學機電工程學院,浙江 杭州 310018)
用于超級黑板的可抗震型光電定位系統設計
章佳輝1,2,郭華亮3,徐志宇1,趙明巖4
(1.同濟大學電子與信息工程學院,上海 201804;2.博洛尼亞大學電氣電子與信息工程學院,博洛尼亞 40136;3.華東理工大學信息科學與工程學院,上海 200237;4.中國計量大學機電工程學院,浙江 杭州 310018)
針對“超級黑板”應用中的定位要求,開發了一種可抗震型光電定位系統。采用STM32F103單片機作為主控芯片,選用光敏電阻檢測光線,設計了矩陣鍵盤式電路以節約I/O口資源、縮短定位時間;芯片與電路的配合使系統具備了實時輸出數字位置信號的能力。通過卡槽結構和激光頭的安裝,使該系統適用于以下工況:首先,測量范圍較大,且要求在測量范圍內無盲區(整個被測范圍內保持一定的精度);其次,測量空間狹小且存在一定的震動。樣機的實測結果顯示,當測量范圍為2 m時,系統測得的位置誤差小于±0.5 cm,即精度可達 0.25%。
超級黑板; 抗震; 光電定位; STM32; 傳感器; 矩陣鍵盤; 掃描讀取
0 引言
黑板是傳統課堂教學中的一種重要教學演示工具。隨著多媒體技術的引入,黑板與多媒體投影配合使用時出現了新問題:①黑板的有效書寫面積因為投影幕的遮蓋而減小;②投影幕所在的位置使教室一側的同學因為反光而無法看清投影內容。為此,文獻[1]將投影幕與黑板緊密結合,提出了一種教學用板書投影裝置,簡稱“超級黑板”。其基本工作原理如下。將傳統的黑板改成同步帶和磨砂玻璃的組合,其中磨砂玻璃(透明)置于同步帶前,用于書寫粉筆字。同步帶分為白色投影區域和深色黑板背景區域,當后方為深色黑板投影區域時粉筆字才能被看清。白色投影區域處于同步帶中的一個固定位置,通過同步帶轉動可以改變白色投影區域相對毛玻璃的位置,且投影儀跟隨轉動,使投影內容實時投影在白色投影區域上;白色投影區域可以轉到同步帶背側,使整個黑板面全是深色黑板背景區域。
1 系統設計背景
為確保投影儀跟隨白色投影區域平穩同步移動,關鍵要解決白色投影區域的精確定位問題。白色投影位置的定位需要在同步帶的狹小空間內完成,并在測量范圍(黑板的長度)內保持一定的精度;同時,定位過程還存在震動的干擾。
現階段的定位傳感技術廣泛采用測距定位的方式。目前,典型的非接觸式測距方法有超聲波測距、感光耦合元件(charge coupled device,CCD)測距、紅外測距、激光測距等[2]。其中,超聲波測距時傳播波速不恒定,回波信號幅值隨傳播距離增大呈指數規律衰減,且可能存在盲區;因測量距離較長需要多個超聲波時,容易產生串擾的問題[2-3]。此外,紅外測距儀在應用環境中也受局限。和大多數紅外測距儀一樣,SHARP公司的GP2Y0A02YK0紅外距離傳感器,測量范圍為200~1 500 mm[4],其應用局限于短距離的測量定位。現階段的高精度定位方式有:利用掃頻試驗和建模進行微定位、運用飛秒光頻梳頻域干涉的絕對測距方法等,均局限于小范圍測距,且不能在震動環境下完成測量工作[5-6]。
以上測距定位方法對于上述“超級黑板”的環境均不適用。如今用于測距定位的儀器或者系統,有的要求在一定的使用范圍內,超出范圍誤差會明顯增大;有的則必須通過曲線擬合來得到相對準確的距離值[3-8]。文獻[9]中石油井的井徑測量,通過設計閾值迭代超聲波測距系統提高精度;文獻[10]提出了采用新的光纖材料來測量絕對距離,但均是在相對穩定的環境下測量一個限定范圍內的距離值[9-10],尚未能得到一個適用于上述“超級黑板”應用情境的定位方案。為此,本文針對“超級黑板”的特殊應用需求,基于光電傳感原理,設計了一種可抗震型光電定位系統。
2 系統整體設計
本文設計了一種用于“超級黑板”的可抗震型光電定位系統。系統分為硬件和軟件兩部分,硬件主要包括基于光敏電阻和激光頭的傳感模塊、矩陣鍵盤式電路、STM32F103微控制器以及激光頭卡槽;軟件主要指運行在STM32F103微控制器的程序,主要負責位置信號掃描讀取、位置信號換算及數字信號輸出。硬件的搭建是為了克服震動環境的干擾,使系統在長距離測量的情況下保持一定的精度,以及給軟件處理提供必要的前提。其中,傳感器的安裝包括光敏電阻的排布和激光頭的安裝,所搭建的矩陣鍵盤式電路可節約I/O口資源,并且通過與微處理器的配合縮短定位時間,提高效率。軟件設計主要是基于矩陣鍵盤式電路的掃描函數,并且通過分析從I/O口獲得的信號來換算出相應的位置信息,換算后用數字信號輸出。可抗震型光電定位系統結構如圖1所示。
3 硬件設計
3.1 硬件選擇
傳感器選擇光敏電阻和激光頭。光敏電阻在特定波長的光照射下,其阻值會迅速減小,故選取暗電阻較大、亮電阻較小的MG45-22的光敏電阻和5 V驅動的點狀激光頭。激光具有發散角小、時間快、性價比高、實用性強等優點,廣泛應用于位移測量、定位系統中[11]。
選擇STM32F103作為系統的微控制器。它是32位的ARM微控制器,具有Cortex-M3內核,最高工作頻率達到72 MHz,使系統滿足低成本、高精度、高穩定性和高可靠性等要求[12]。
3.2 傳感器安裝
在物體的運動軌跡處依次排布光敏電阻,相鄰光敏電阻用不透光的隔板阻隔,光敏電阻的寬度為0.5 cm;根據總長度將光敏電阻分為n組,每一組具有相同數量(m個)的光敏電阻;對光敏電阻分別標號,從左向右依次標注RL,1、RL,2、…、RL,nm(nm即為光敏電阻的數量)。單個光敏電阻安裝示意圖如圖2所示。
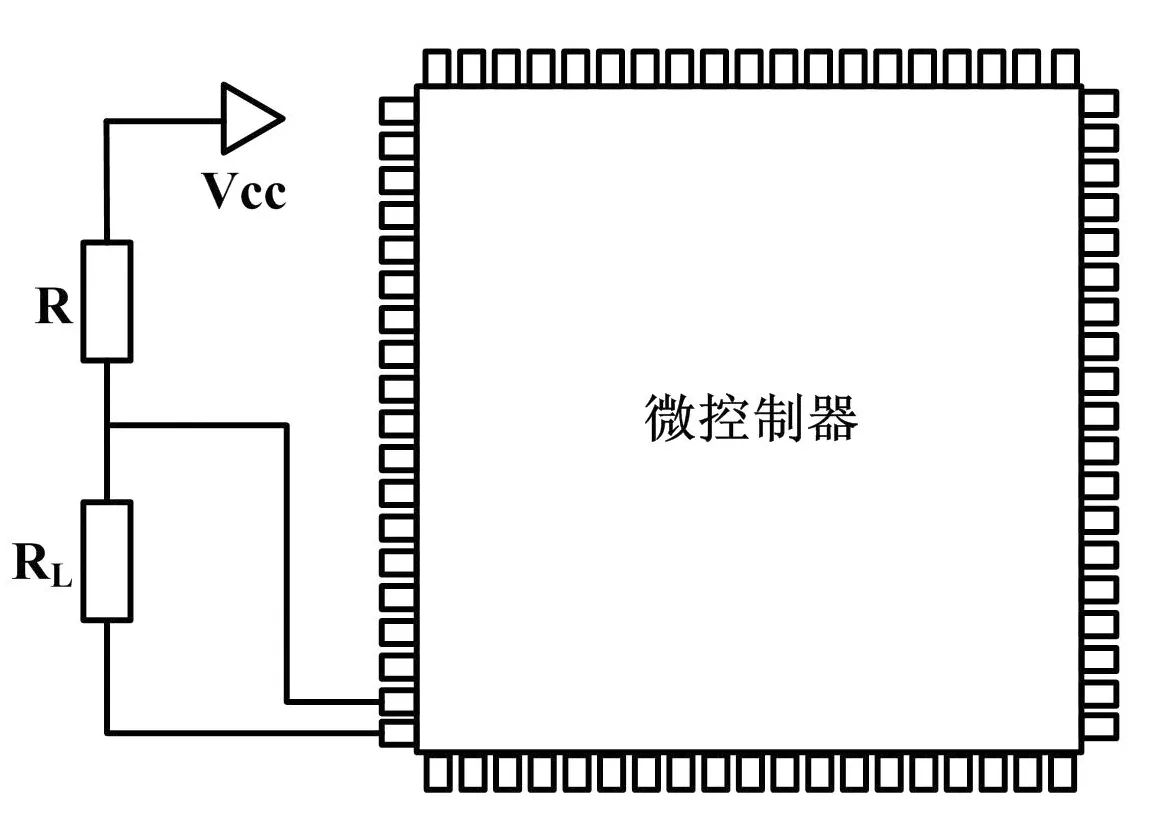
圖2 單個光敏電阻安裝示意圖
圖2中:光敏電阻一端上拉一個電阻,光敏電阻和上拉電阻之間引出一點連接到微控制器的I/O口;光敏電阻的另一端引出一個點連接到微控制器的I/O口。
系統整體安裝示意圖如圖3所示。將排布好的光敏電阻放置于一個密封的盒子中,其一側留出一個卡槽放置激光頭,使激光頭不會脫落且存在一定的空間允許震動。激光頭本身架在卡槽上,其一端固定于移動物體上。光敏電阻在排布后,將引線依次和微控制器的I/O口連接。
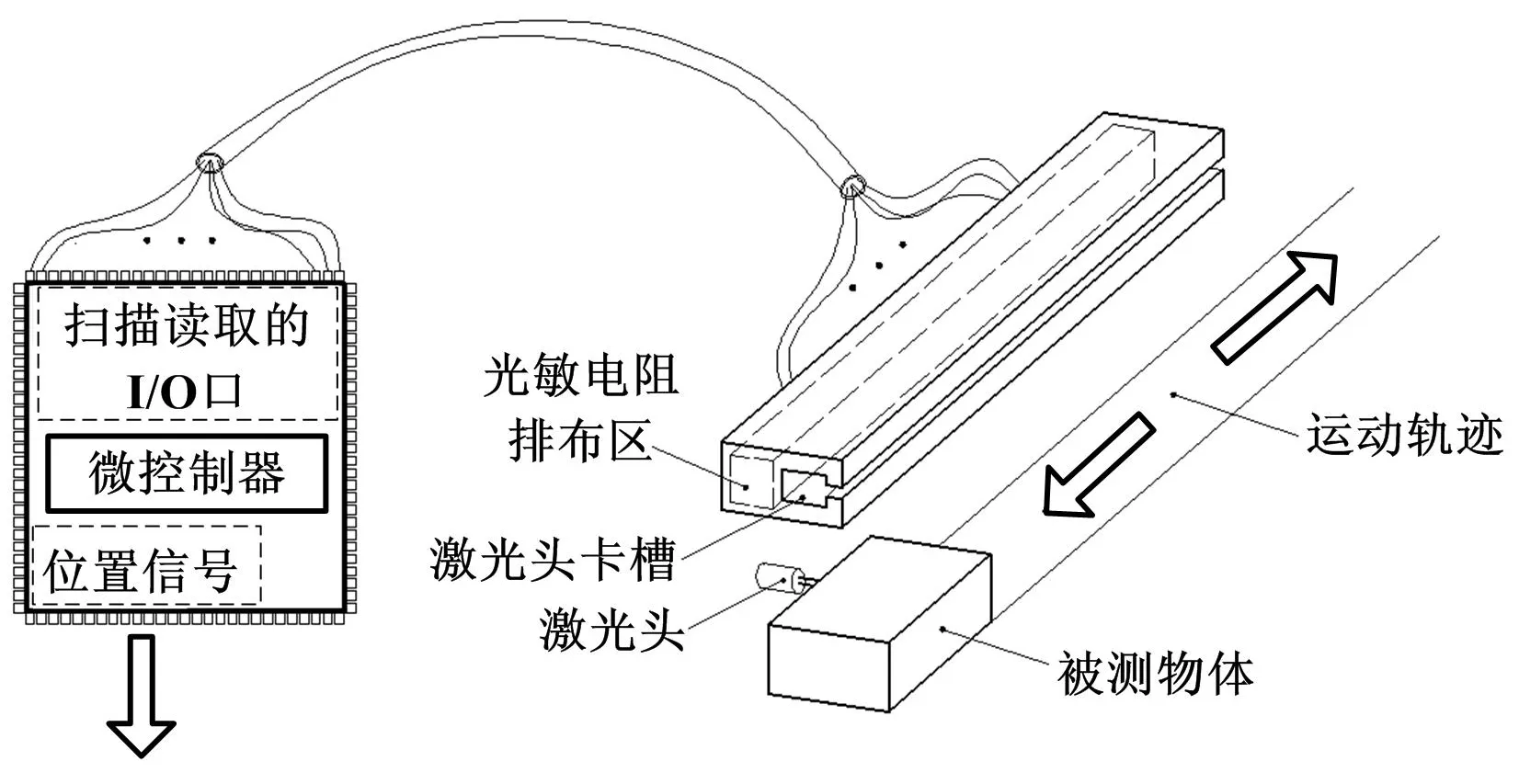
圖3 系統整體安裝示意圖
3.3 矩陣鍵盤式電路搭建
矩陣鍵盤式電路節省了I/O口的使用數量,能夠在I/O口有限的情況下,迅速定位到按鍵按下的位置。該應用普遍用于鍵盤,故得其名[13]。
基于矩陣鍵盤的優點,本文設計了系統中的傳感部分,即矩陣鍵盤式電路,利用光敏電阻的光電效應取代了原矩陣鍵盤中的開關按鍵。矩陣鍵盤式電路如圖4所示。

圖4 矩陣鍵盤式電路圖
將排布的光敏電阻分成n組,每組m個光敏電阻。X和Y是分別由光敏電阻的兩端形成端口組,X包含的端口用ax(第x組中,電阻和光敏電阻之間引出的點)標記,Y包含的端口用by(所有組的第y個電阻下端連結以后引出的點)標記,則(x,y)為唯一確定的位置。本系統選用光敏電阻和激光頭的組合,利用了光敏電阻在特定光照下阻值會急劇降低的特性,進行3.2節所述傳感器的安裝。則激光頭跟隨物體移動的過程中,所照射的光敏電阻阻值急劇降低,而未照射到的電阻阻值遠遠大于上拉電阻。即光敏電阻受到照射時,若Y(b1,b2,…,by)端口全部置0,則X(a1,a2,…,ax)端口中,被照射的光敏電阻所處的位置電壓接近于0,其余為高;若X(a1,a2,…,ax)端口全部置0,則Y(b1,b2,…,by)端口中,被照射的光敏電阻所處的位置電壓接近于0,其余為高。于是,上拉電阻端的電壓VCC選擇單片機可以承受的電壓,便可以通過讀取單片機I/O口的高低電平判斷出光敏電阻阻值的變化,這樣光敏電阻便可以看作是一個矩陣鍵盤的“按鍵”。綜上所述,通過安裝光敏電阻,可以形成一個矩陣鍵盤式的電路,具體掃描和定位詳見4.1。
4 軟件設計
4.1 掃描讀取位置
光敏電阻兩端分別可以引出端口組X(a1,a2,…,ax)和Y(b1,b2,…,bx)。
掃描程序流程如圖5所示。
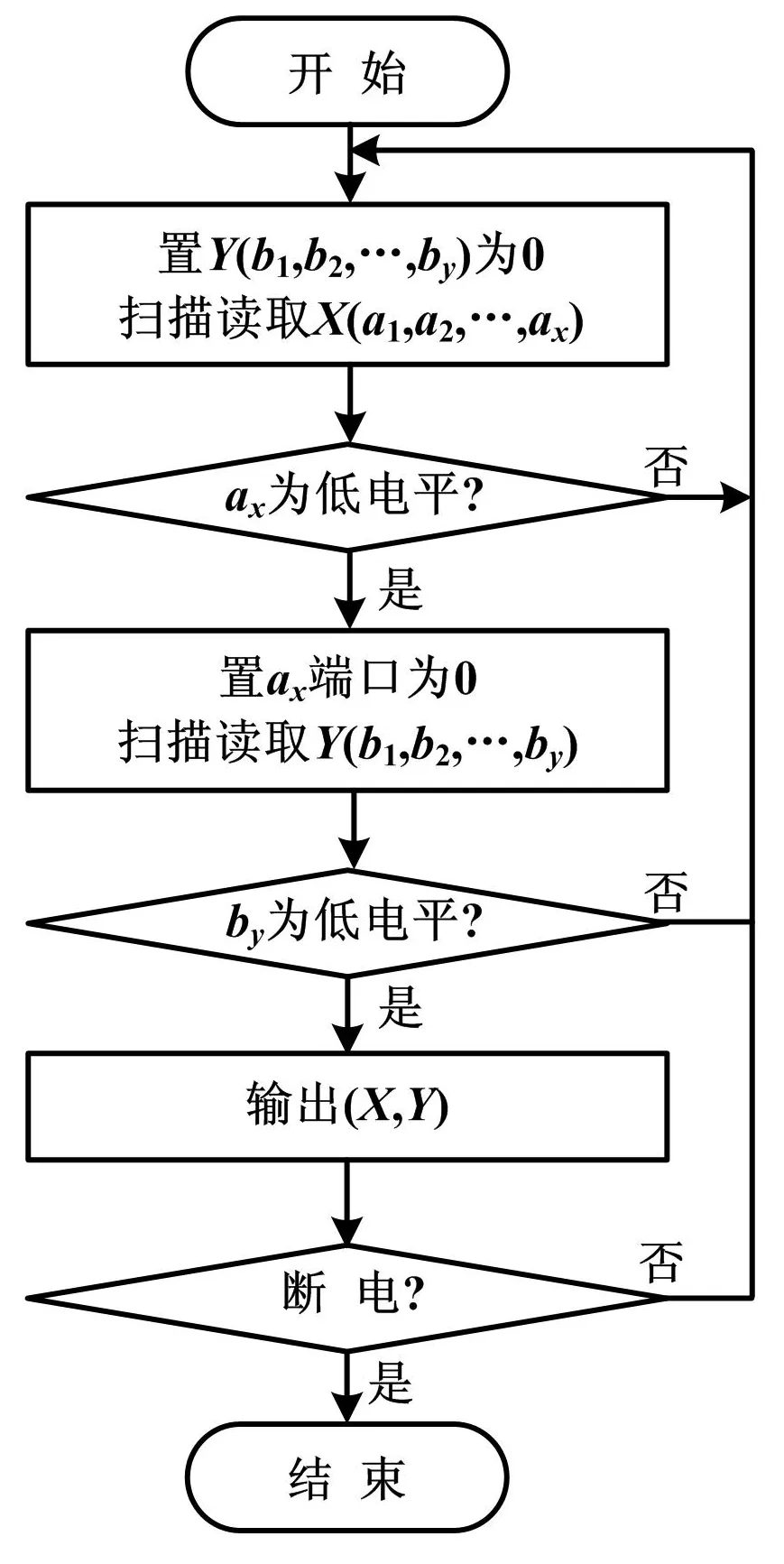
圖5 掃描程序流程圖
軟件設置一個掃描周期,每過一段時間掃描矩陣鍵盤式電路引出的I/O口。若一個光敏電阻阻值發生變化(即激光頭跟隨物體運動到相應位置,該光敏電阻受到激光頭照射),則設置Y(b1,b2,…,by)端口組所有端口的電壓為0,相應的ax端口電壓被拉低,其余為高。故通過掃描讀取X(a1,a2,…,ax)端口組就可以找到相應的ax端口,然而ax端口連接著一組光敏電阻,具體確認需要置ax端口(僅此一個)為0,掃描讀取Y(b1,b2,…,by)端口組,可以找到相應的by端口的電壓為0,其余端口為高。由此即可得到唯一確定的(x,y)。該點即為阻值變化的光敏電阻所在點,也是被測物體的位置。
4.2 位置信號換算及數字信號輸出
在排布光敏電阻時,給每一個光敏電阻編號,則(x,y)為確定位置。根據圖4的光敏電阻排布,令上起為0點,從上到下依次排序,每個光敏電阻寬度為0.5 cm,即相鄰2個光敏電阻的中心位置間距為0.5 cm,且每組有m個光敏電阻,共有n組。相鄰光敏電阻用不透光的隔板阻隔,當激光照射到一個光敏電阻,即該光敏電阻的2個相鄰隔板之間時,記被測物體所在的位置為該光敏電阻的中心位置。被測物體所在的位置P可表達為:
P=0.5[(x-1)m+(y-1)n]+0.25
(1)
式中:x、y分別為被照射位置所對應的2個端口組的編號,x∈{1,2,…,n},y∈{1,2,…,m}。
當激光恰巧照射在某一個隔板上,隔板2側的光敏電阻均受到照射,則被測物體所在位置取2個光敏電阻中心位置的平均值。此時,P可表達為:
P=0.5{[(x1-1)m+(y1-1)]+[0.5(x2- 1)m+(y2-1)]+0.5}
(2)
式中:x1、y1為被照射的2個光敏電阻中距離0點較近的光敏電阻;x2、y2為較遠的光敏電阻。
由STM32完成掃描信號的給定、公式的運算、數字信號的輸出等操作。STM32具有32位的Cortex-M3內核,最高工作頻率達到72 MHz。它不僅能快速掃描電路,還能迅速計算出數字信號位置P;可以選擇通過接口輸出,例如串口、液晶屏和藍牙等,也可以直接通過單片機進行控制操作來修正位置偏差,例如輸出PWM信號、控制指令等。
5 樣機制作與性能測試
本文介紹的系統涉及一種新穎的傳感器應用,其將光敏電阻、激光頭和矩陣鍵盤結合,可以在較大的被測范圍內輸出被測物體的位置。
根據本文的內容制作樣機。樣機將測試長度選為2 m,隨機選取24個測量點,通過卷尺測量得到真值,控制器通過串口輸出到上位機的值為測量值,并且通過計算得到絕對誤差。樣機測試試驗結果如表1所示。
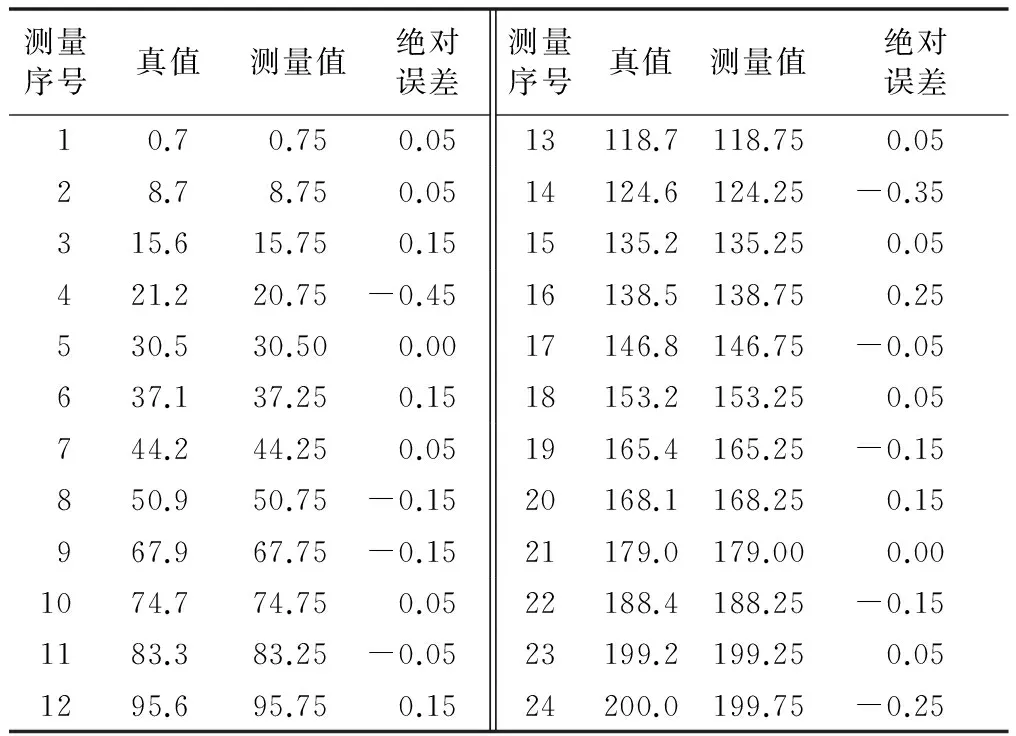
表1 樣機測試試驗結果
測量點絕對誤差分布圖如圖6所示。
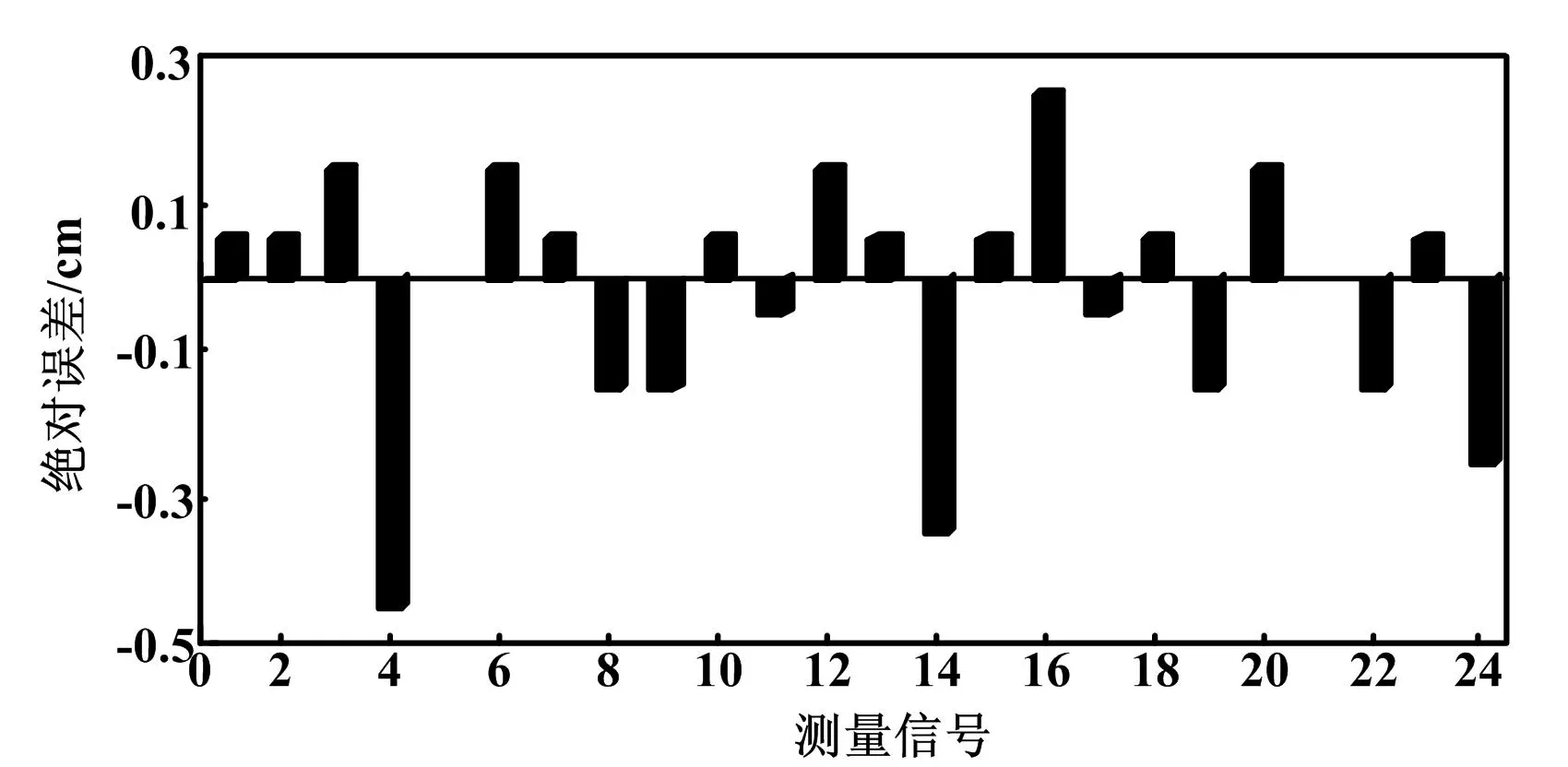
圖6 測量序號點絕對誤差分布圖
經過分析,發現測試過程中出現了3個異常點(測量序號為4、14、16),即激光頭發生了偏轉,沒能正確照射到相應位置的光敏電阻,但絕對誤差仍保持在±0.5 cm范圍以內。由此可知,樣機中傳感部分的位置誤差小于±0.5 cm,分辨率為0.5 cm。
本文設計制作的樣機將“超級黑板”作為測試環境,選取了2 m(黑板長度)的被測范圍,即將黑板中投影區域作為測試對象,其位置作為測試的主要參數。測試條件為:額定工作電壓為12 V的步進電機帶動的同步帶轉動,測得其精度約等于0.25%,同樣滿足上述的誤差范圍和分辨率。文獻[14]中提到的縫隙搜救機器人利用重建軌跡與模擬廢墟的定位方法,在長為3.4 m的測量范圍內精度達到20 cm以內。比較得出,本文在精度方面得到了顯著的提升。在樣機的工作中,“超級黑板”的同步帶在步進電機的驅動下存在一定的震動,樣機仍能不受影響地測量,滿足抗震性的要求。經過樣機測試,以STM32為核心的控制器結合矩陣鍵盤式電路,縮短了位置測量的時間,達到了實時輸出位置信號的要求,運行高效且價格低廉。樣機克服了文獻[2]中所述的傳感器部分局限,較好地解決了“超級黑板”中白色投影區域精確定位的問題。
6 結束語
針對“超級黑板”應用時所涉及的現階段定位傳感技術的缺陷(如測量范圍短,且存在盲區;非線性的特點影響測量;測量時要求穩定的環境,不能存在震動干擾等),分析了現階段常用的測距定位傳感器,設計開發了一種可抗震型光電定位系統。該系統可適用于測量范圍較大且要求在測量范圍內無盲區(整個被測范圍內保持一定的精度),或測量空間狹小且存在一定的震動的特殊應用環境。本系統通過光敏電阻的排布形成矩陣鍵盤式電路,節約了I/O口的資源;設計了放置激光頭的卡槽,使被測物體可以存在一定范圍的震動;并且通過軟件設計達到了實時輸出數字位置信號的功能。制作樣機,選取2 m的測試范圍,系統位置誤差能保持在±0.5 cm的范圍以內,且保持約為0.25%的精度。該系統還存在缺陷,即其誤差受光敏電阻本身體積限制,且物體震動范圍不能過大。因此下階段,一方面可以尋找體積更小,光電效應更良好的光敏電阻;另一方面,可以改進激光頭卡槽的結構以提高抗震的效果。
[1] 王魯旭.教學用板書投影裝置:201410727124.X [P].2015-02-25.
[2] 李戈,孟祥杰,王曉華.國內超聲波測距研究應用現狀[J].測繪科學, 2011,36(4):60-62.
[3] 張松,張亞.基于m序列的無串擾超聲波測距系統[J].電子測量技術,2015,38(10):22-27.
[4] 馬宏平,蔣勵,宋竹青.多方向紅外測距新型智能導盲杖[J].光學儀器, 2012,34(5):84-88.
[5] 糜小濤,于宏柱,高鍵翔.大型衍射光柵刻劃機微定位系統控制器設計[J].儀器儀表學報,2015,36(2):473-480.
[6] 安慰寧,張福民,吳翰鐘.一種基于飛秒光頻梳頻域干涉的絕對測距方法[J].儀器儀表學報,2014,35(11):2458-2465.
[7] HUANG Y,ZHOU C.Overview on optical measurements of shaft diameter detection[C]//Proceedings of International Conference on Information Sciences,Machinery,Materials and Energy(ICISMME 2015),2015:953-956.
[8] 沙愛軍.基于單片機的超聲波測距系統的研究與設計[J].電子科技,2009,22(11):57-61.
[9] 李勝,倪衛寧.閾值迭代超聲波測距系統設計[J].自動化儀表,2014,35(2):24-26.
[10]DUAN F J,YANG B,YE S H.New optic fiber interferometer system for absolute distance measurement[C]//Proceedings of the Second International Symposium on Instrumentation Science and Technology,2002.
[11]周美麗,白宗文.基于2D-PSD的激光位移測量系統設計[J].國外電子測量技術,2015,34(2):64-66.
[12]畢繼耀,張大偉,楊海馬.線陣CCD光譜分辨率檢測系統設計[J].電子測量與儀器學報,2015,29(7):1086-1092.
[13]鄭采君.基于CPLD的矩陣鍵盤掃描模塊設計[J].電子設計工程,2010,18(10):169-175.
[14]邱亞,沈林勇,胡衛建.縫隙搜救機器人鏡體的形狀重建和定位方法[J].儀器儀表學報,2015,36(12):2782-2789.
Design of the Anti-Vibrate Photoelectric Positioning System for Super Blackboard
ZHANG Jiahui1,2,GUO Hualiang3,XU Zhiyu1,ZHAO Mingyan4
(1.College of Electronics and Information Engineering,Tongji University,Shanghai 201804,China;2.Department of Electrical,Electronic and Information Engineering,University of Bologna,Bologna 40136,Italy;3.Institute of Information Science and Engineering,East China University of Science and Technology,Shanghai 200237,China;4.College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou 310018,China)
In view of the positioning requirement in application of “Super Blackboard”,an anti-vibrate photoelectric positioning system has been developed.Making use of microcontroller STM32F103 as the main control chip;and selecting photosensitive resistance to detect the light;the matrix keyboard circuit is designed to save the resources of I/O ports,and shorten the time of positioning;meanwhile;the cooperation of the chips and the circuits makes the system possess the ability of outputting the digital information of position in real time.With the structure of slots and the installation of the laser head,the system is suitable for following working environments: these are large range of measurement and no blind area exists in the range of measurement (keeping a certain precision in the whole range being measured), and the space of measurement is narrow and a certain vibration exists.The test results of the prototype show that in the case of 2 m measurement range,the system keeps the output error of the position within ±0.5 cm,i.e.,the precision is up to 0.25%.
Super blackboard; Anti-vibrate; Photoelectric positioning; STM32; Sensor; Matrix keyboard; Scan reading
浙江省大學生科技創新活動計劃基金資助項目(2015R409003)、上海市重點課程建設基金資助項目
章佳輝(1993—),男,在讀碩士研究生,主要從事智能控制方向的研究。E-mail:karlzhangjh@163.com。 徐志宇(通信作者),男,博士,高級工程師,主要從事智能控制理論及應用研究。E-mail:xuzhiyu@tongji.edu.cn。
TH-39;TP274
A
10.16086/j.cnki.issn1000-0380.201708003
修改稿收到日期:2017-02-27
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
