基于Pro/E的扭矩扳手仿真
2017-08-30 00:17:22西安思源學院工學院譚栓斌
電子世界 2017年15期
西安思源學院工學院 譚栓斌
陜西眾拓科技發展有限公司 朱智民
西安思源學院工學院 胥云博
基于Pro/E的扭矩扳手仿真
西安思源學院工學院 譚栓斌
陜西眾拓科技發展有限公司 朱智民
西安思源學院工學院 胥云博
本文以汽車常用扭矩扳手為例,詳細測繪該扭矩扳手的各個零件。在此基礎上,使用三維軟件Pro/E構建其裝配圖,并且分析其運動狀態和受力情況。結果表明:當彈簧壓縮為1mm時,所對應的設定力矩為0.53 N·m。當扳手頭部施加0.53 N·m的力矩時,扭矩扳手會碰撞套筒,并且聯接桿受力明顯減小,方向接近于水平。
扭矩扳手;仿真;扭矩值
一、引言
扭矩扳手廣泛用于對擰緊工藝有嚴格要求的裝配線,比如汽車發動機的裝配線。使用扭矩扳手可以使各個緊固件扭矩值達到合理的設計值,從而保障產品的均勻性和可靠性。按照使用動力的區別,扭矩扳手一般分為手動、氣動和電動扭矩扳手。其中,手動機械音響扭矩扳手因為價格便宜,扭矩調整方便,扭矩精度可以控制,所以仍然是市場的主力產品。
在實際工作中,為了保證緊固件扭矩值的一致性,常常要求扭矩扳手設定的扭矩值具有穩定性,因此對于扭矩扳手的質量有嚴格的要求。與日本、德國等發達國家的扭矩扳手相比較,我國制造的扭矩扳手不管是扭矩值的設定,扭矩值的穩定性方面都還有較大的差距。本文以某著名廠家的扭矩扳手(扭矩值小于50N·m)為例,詳細測繪該扭矩扳手的各個零件。在此基礎上,使用三維軟件Pro/ E構建其裝配圖,并且分析其運動狀態和受力情況。
二、建模
詳細測繪該扭矩扳手的各個零部件,應用Pro/E軟件進行裝配,圖1為裝配效果圖。爆炸展開后見圖2所示。從總體上來說,該扭矩扳手可以分為三部分,分別為頭部,中部和尾部。
頭部的主要作用是連接緊固件和扭矩扳手,并且按照需要使得扳手可以進行順時針和逆時針進行旋轉。完成這些功能主要依靠零件10、9和2。一方面,零件10的方頭可以連接緊固件,另外一方面,當撥動控制桿2時,零件9的左或者右便和零件10的齒輪部分緊密配合,這種情況下扭矩扳手只能進行順時針或者逆時針單向轉動施加扭矩,反向不能施加任何扭矩。這樣可以讓扭矩扳手在進行零件的拆卸或組裝時,可以連續不斷的轉動,不用脫離緊固件。從而大大提高了工作效率。
尾部的主要作用是扭矩值的設置,這部分功能主要依靠零件21、26和27等來完成。旋轉扭矩調整環26,在扭矩調整螺母22等零件的作用下,壓縮彈簧21,當扭矩值到達所設定的值時,通過鎖定螺釘27進行扭矩值的鎖定,以防止在工作過程中扭矩值的變化。
中部為一脫開機構,這部分功能主要依靠零件3、5、16和19等來完成。當扭矩扳手不工作時,在零件21彈簧的作用下,零件3的斜面緊貼零件19的斜面部分;當旋轉扭矩扳手進行工作時,扭矩到達所設定的扭矩值時,零件3繞著零件14的軸進行旋轉,此時零件16便開始轉動,零件16轉動的結果使得零件19向右運動進一步壓縮彈簧。此部分為扭矩扳手的核心之一,在零件16的作用下,零件19向右運動,表面看起來零件19越向右運動,彈簧對其的作用力便越大,似乎零件19不可能繼續向右運動,但是,隨著零件19向右運動,零件16對零件19的作用力矩卻在增大,增大的主要原因是隨著零件16的旋轉,零件3通過零件16對零件19的作用力臂在不斷增大。正是這一原因,只要一達到所設定的扭矩值,零件3便繞著零件14進行旋轉,直到零件3右端的突出部分碰到零件17而發出清脆的"卡塔"聲,提示操作者扭矩值已達到設定值,不應該繼續加力。
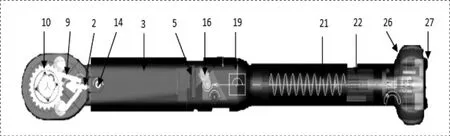
Figure 1. Model of torque wrench圖1扭矩扳手Pro/E建模圖
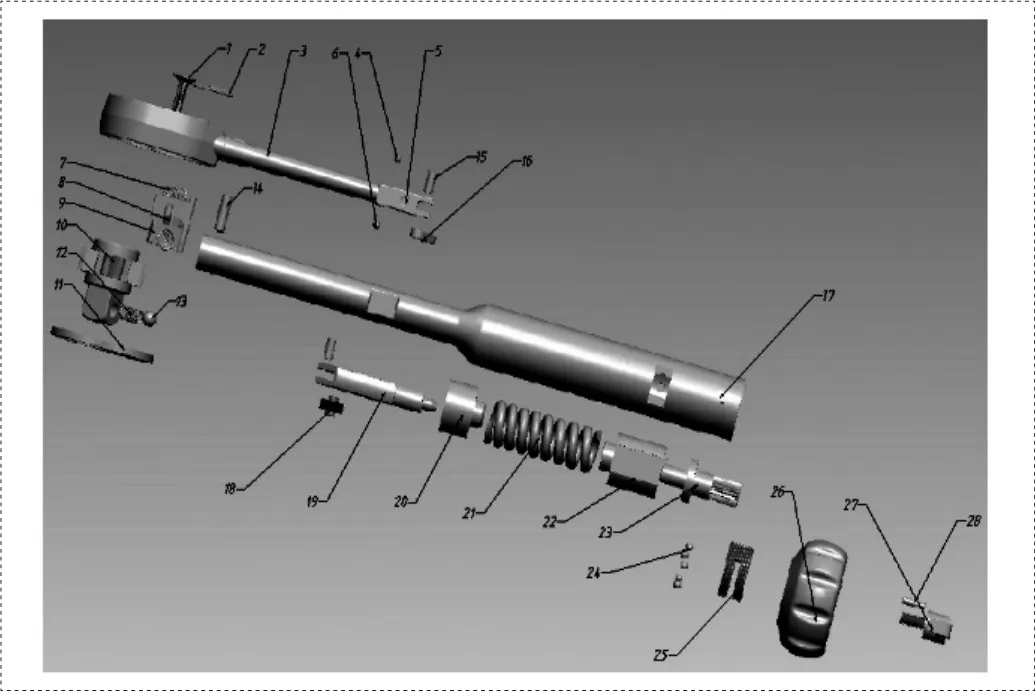
Figure 2. Exploded fi gure of torque wrench圖2 扭力扳手爆炸圖
三、仿真
為了說明問題的方便,扭矩扳手可以用如圖3所示的簡化方式進行表示。當設置好一扭矩值的時候,主彈簧處于壓縮狀態。如果扭矩扳手開始旋轉擰緊螺釘,如圖4所示,相當于在扳手頭部施加一個力矩,在這一力矩的作用下,扳手桿圍繞支撐部分進行旋轉,同時導致連接板的旋轉運動,隨著連接板的旋轉,連接板推動滑塊向右運動,并且壓縮彈簧。當位于扳手桿右部的突出部分碰撞扭矩扳手套管的外壁,發出清脆的"卡塔"聲,扳手桿、連接板不再旋轉,滑塊不再向右運動,彈簧不再進一步受到壓縮,其運動狀態如圖5所示。
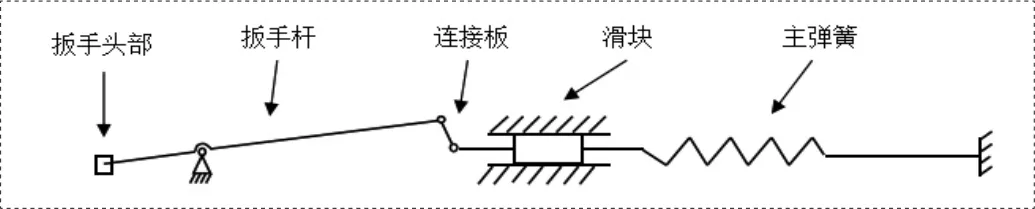
Figure 3. Kinematic sketch of torque wrench圖3 扭矩扳手運動傳遞簡圖

Figure 4. Initial working sketch of torque wrench圖4 設定好扭矩值的扭矩扳手開始工作示意圖

Figure 5. Final working sketch of torque wrench圖5 達到設定扭矩值時扭矩扳手狀態圖
按照以上的分析,在Pro/E進行仿真的時候,主要設定如圖4所示的4個銷釘連接,銷釘連接在仿真進行的時候只有一個旋轉的自由度;1個滑塊連接,所設定滑塊連接在圖4所示的狀態只有左右平移的一個自由度。選定彈簧的基本參數為F=K(u-x),其中K值設定為5N/mm,彈簧的自由長度為50mm,設定好扭矩值,對應的彈簧長度為49mm。
四、結果分析
按照以上設定的初始條件在機構分析模塊中對扭矩扳手進行靜態分析。Pro/E的靜態分析主要研究機構中主體平衡時的受力狀態,由于不考慮速度和慣性,這種機構分析模式比動態分析可以更快的找到平衡狀態。
進行機構仿真分析的時候,在圖3所示的扳手頭部施加一系列力矩,觀察連接板的運動狀態。結果顯示:當施加力矩小于0.53 N·m的時候,扭矩扳手處于圖4所描述的狀態;當施加力矩等于0.53 N·m的時候,扭矩扳手的連接板發生旋轉,并且會達到圖5所示的狀態;施加力矩不存在大于0.53 N·m的時候,因為只要施加力矩等于0.53 N·m,扭矩扳手就會發出清脆的"卡塔"聲,提醒操作者已經到達所設定的扭矩。通過以上的分析,可以明顯的看出,彈簧由50mm壓縮到49mm,所對應的扭矩扳手扭矩值為0.53 N·m。
Pro/E的靜態分析的結果顯示,當在扭矩扳手頭部施加5291N·mm(0.53 N·m)的力矩時,扳手開始工作時候主要元件的受力圖見圖6所示。圖中左邊的箭頭表示支撐部分對于扳手桿作用力的方向和大小,力的大小約為66N。圖中右邊的兩個大小相等,方向相反的箭頭表示扳手桿和滑塊對連接板作用力的大小和方向,力的大小約為73N。同時,彈簧被壓縮1mm,彈簧所受的壓縮力約為5.4N。

Figure 6. Initial force diagram of torque wrench applied torque of 0.53 N·m圖6 施加力矩為0.53 N·m扳手開始運動瞬間受力圖

Figure 7. Final force diagram of torque wrench applied torque of 0.53 N·m圖7 施加力矩為0.53 N·m扳手受力平衡受力圖
當在扭矩扳手頭部施加5291N·mm(0.53 N·m)的力矩時,扳手處于平衡時候主要元件的受力圖見圖7所示。圖中左邊的箭頭表示支撐部分對于扳手桿作用力的方向和大小,力的大小約為101N,相比較與上圖,力的方向變化較小,力的大小從66N增加到101N,增加很明顯。圖中右邊的兩個大小相等,方向相反的箭頭表示扳手桿和滑塊對連接板作用力的大小和方向,力的大小約為25N,相比較與上圖,力的大小和方向變化都非常明顯,力的大小從73N減小到25N,力的方向從接近鉛錘方向變化為接近水平方向。在以上分析的力中間,還存在一個大小為94.6N的力,這是由于扳手桿運動到碰撞套管,套管對扳手桿有一接近向上的作用力。同時,彈簧被壓縮5mm,彈簧所受的壓縮力約為24.7N,增加很明顯。
五、結論
a) 利用Pro/E清楚的再現了扭矩扳手的結構和運動。
b) 當彈簧壓縮為1mm時,所對應的設定力矩為0.53 N·m。
c) 當扳手頭部施加0.53 N·m的力矩時,扭矩扳手會碰撞套筒,并且連接桿受力明顯減小,方向接近于水平。
[1]祝凌云,李斌編. Pro/Engineer運動仿真和有限元分析[M].北京:人民郵電出版社,2004.
譚栓斌(1970-),男,高級工程師,研究方向為材料成型和模具設計。
陜西省教育廳自然科學基金(12JK1069)
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44