基于鍵合圖的混合動力汽車建模與仿真
2017-09-01 01:13:31王濤王凱林秋豐莊宗憲李志遠
河北大學學報(自然科學版) 2017年4期
關鍵詞:發動機
王濤,王凱,林秋豐,莊宗憲,李志遠
(1.河北大學 質量技術監督學院,河北 保定 071000; 2.河北工程大學 機械與裝備工程學院,河北 邯鄲 056000; 3.屏東科技大學 車輛工程系,臺灣 屏東 000912)
基于鍵合圖的混合動力汽車建模與仿真
王濤1,王凱2,林秋豐3,莊宗憲3,李志遠1
(1.河北大學 質量技術監督學院,河北 保定 071000; 2.河北工程大學 機械與裝備工程學院,河北 邯鄲 056000; 3.屏東科技大學 車輛工程系,臺灣 屏東 000912)
針對一套應用逆向差速器作為動力耦合機構的混合動力系統進行了研究,該系統結合了電機低速性能佳、低噪音的優點與發動機高速性能佳、能源供應鏈完整的特點,依據車輛在不同行駛工況下的功率需求以及駕駛員的不同車速需求,規劃了混合動力系統的能量管理模式.本文重點分析了混動模式下的運動情形,采用功率鍵合圖方法進行建模并推導其系統動態方程式,應用Matab進行仿真.仿真結果顯示:依據BSFC將發動機設置在最佳經濟轉速內運行,控制HEV各動力組件的動態參數在高效率范圍內運行,逆向差速器動力耦合機構滿足車輛后輪需求功率,可實現低污染、低能耗的目標;應用功率鍵合圖方法可準確地模擬車輛在NEDC2000行車模式下發動機、電機/發電機的性能變化曲線,該方法在混合動力驅動系統中多能量耦合的動態建模具有一定的優勢.
逆向差速器;混合車輛動力系統;鍵合圖;建模;仿真
目前,能源危機和環境污染問題日益加劇,混合動力汽車技術(HEV)的研究受到廣泛關注,現已成為各汽車廠家研發的重點產品.在HEV開發過程中,動力傳動系統占據重要地位,按照其結構的布置,一般分為串聯式、并聯式和混聯式3類[1].本文中選取的混合動力系統的動力耦合機構為逆向式差速器動力耦合機構[2],即將一般差速器逆向使用,實現雙輸入、單輸出,該系統結合了電機低速性能佳、低噪音的優點與發動機高速性能佳、能源供應鏈完整的特點.在HEV動態建模中,Butler等[3-5]先后推導了串聯式、并聯式HEV各動力組件與變速器之間的動態方程,并應用Matlab/ Simulink建立了各組件的仿真模型,分析了系統動力傳輸效率與燃油效率.2006年,Hoeijmakers[6]采用電控式無級變速器(ECVT),使發動機在經濟轉速范圍內運行,提高了燃油效率,并將該技術應用在HEV上.
本研究將在此基礎上繼續對應用逆向差速器、ECVT結構的HEV進行研究,應用功率鍵合圖進行建模,以仿真HEV混合動力系統中發動機與電機在混合驅動模式下是否均在高效率范圍內運行,以及對車輛動力性、燃油消耗與污染排放的影響.
1 逆向差速器耦合式HEV
本研究中,HEV動力傳動系統結構如圖1所示[7],主要由動力單元、電池與控制系統3部分組成,動力單元包含發動機、電機、發電機、變速箱及基于逆向差速器的動力耦合機構,如圖2所示.變速箱選用ECVT,變速平順,易于控制,效率比自動變速器高;兩動力源經逆向差速器耦合后與ECVT的輸入軸齒輪嚙合,動力經ECVT輸出后,再經后橋差速器傳至兩后輪.
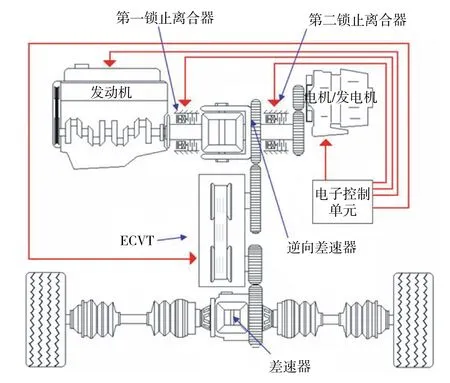
圖1 混合動力系統硬件結構配置Fig.1 Structure of hybrid electric vehicle
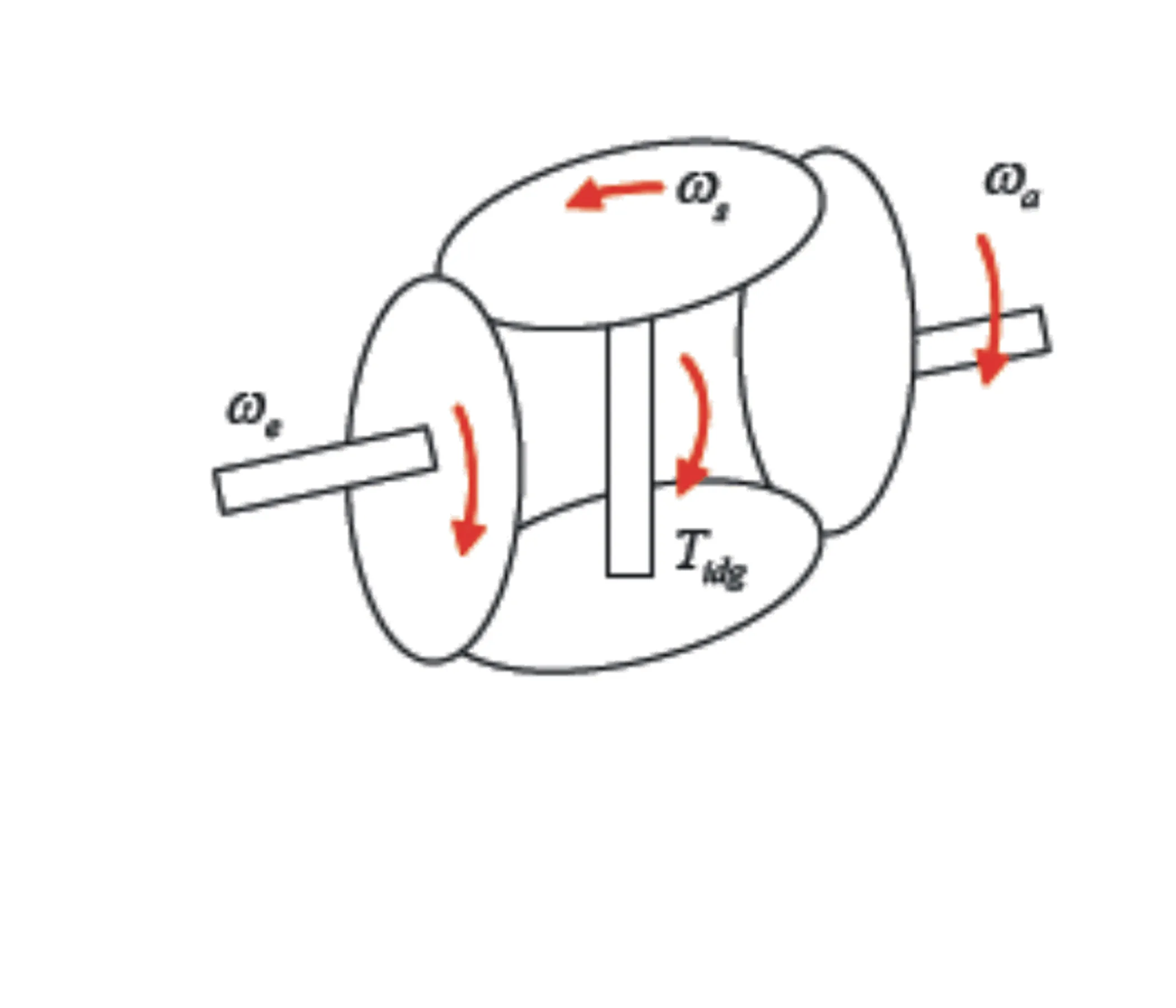
圖2 逆向差速器動力耦合機構運動示意Fig.2 Power coupling mechanism of Inverse differential gearbox
針對車輛在不同行駛工況下所需的功率不同以及駕駛員對車速的不同需求,本文將發動機與電機/發電機的動力分配模式分為以下幾種情況:電機單獨運轉模式、混合運轉模式、混合運轉充電模式、發動機單獨運轉模式、制動充電運行模式[7].本文針對上述模式當中的混合運轉模式進行動態模型的推導.本文的電機/發電機為整體式,在電池SOC充足且低功率需求下電機單獨運轉,在發動機/電機混合運轉模式下,電機輸出扭矩主要是調整發動機的轉速以維持在最佳操作點下運轉.本文以日產March車型作為參考車輛,參數如表1所示.

表1 混合動力汽車參數
2 基于鍵合圖的逆向差速器的混合動力汽車動態模型的建立
在車輛低速情況下所需功率較小,電機單獨動轉,此時,發動機輸出端為鎖止狀態,發動機轉速V1為0.發動機單獨運轉時,電機輸出端為鎖止狀態,因此,電機輸出端切線速度V2為0.
應用鍵合圖法進行建模,可清楚地表達整個系統能量流動的方向[8-10],因此,本文應用功率鍵合圖對圖1所示的HEV在混合運轉模式下進行動態建模.
2.1 混合運轉模式動態模型
因電機端齒輪a的慣性矩Ja與阻尼力矩Ba遠遠小于1,所以將Ja與Ba忽略不計,因為電機端齒輪轉速na和電機端齒輪半徑r2位于同一根軸上,依據鍵合圖理論,將na和r22個Transfer合并,組成1個TF,得出整車在混合運轉模式下的功率鍵合圖[11-12],如圖3所示.
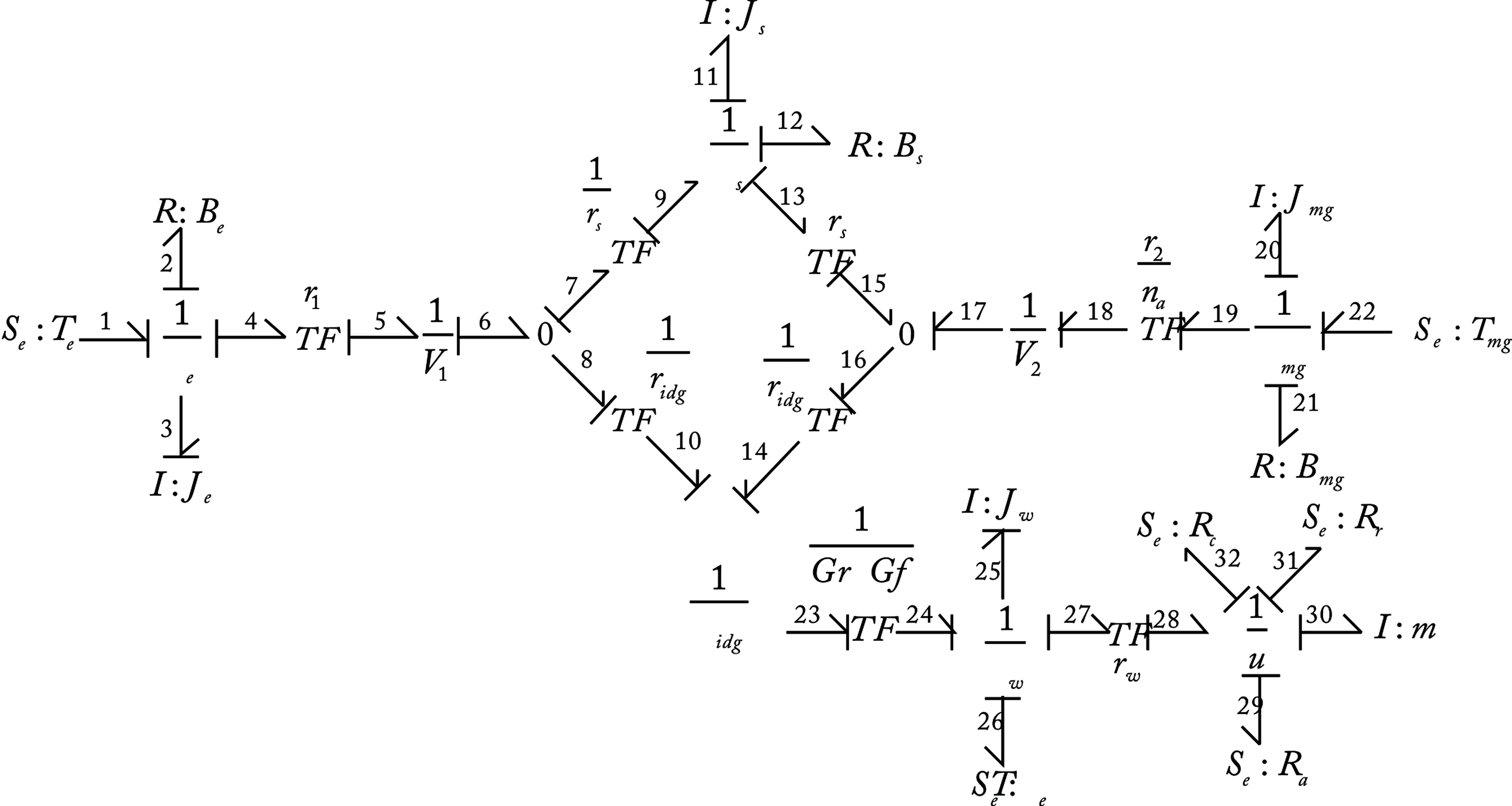
圖3 混合運轉模式下的鍵合圖模型Fig.3 Bond graph model of coupling operation
2.2 混合運轉模式下的系統動態方程式
利用上面簡化后的圖3鍵合圖模型,進行推導,可得出混合運轉模式下的系統動態方程式.
車速與輪胎角速度的關系為
(1)
總的傳動比為
G=GrGf.
(2)
發動機角速度與后輪角速度的關系為
(3)
發動機與后輪的角加速度分別為
(4)
(5)
其中,
對式(4)、式(5)進行積分可得發動機與后輪的轉速.
由后輪轉速可計算出逆向差速齒輪端的公轉角速度.
(6)
由發動機角速度,可得電機/發電機端的輸出角速度,
(7)
圖3中,Se為勢源,I為慣性,R為阻力,TF為轉換器,Te為發動機輸出端扭矩,Tmg為電機/發電機端扭矩,rs為逆向差速器中間2個齒輪的半徑,r1為發動機端齒輪半徑,r2為電機端齒輪半徑,rw為輪胎半徑,ωe為發動機端角速度,ωa為電機/發電機端齒輪角速度,ωidg為差速器端角速度,ωmg為電機/發電機端角速度,ωs為差速器小齒輪角速度,ωw為輪胎角速度,Ba為電機/發電機端齒輪阻尼力矩,Be為發動機端阻尼力矩,Bmg為電機/發電機端阻尼力矩,Bidg為差速器端阻尼力矩,Je為發動機端慣性矩,Jmg為電機/發電機端慣性矩,Ja為電機/發電機端齒輪慣性矩,Jw為輪胎慣性矩,V2為電機端齒輪切線速度,rmg為電機/發電機端齒輪半徑,Gf為電機/發電機端傳動比,Gr為齒輪傳動比,V1為發動機端齒輪切線速度,u為車輛絕對速度,m為車輛質量,θ為路面坡度,μ為滾動阻力系數,W為車輛總重量,a為加速度,ρ為空氣密度,Cd為空氣阻力系數,A為車身前面投影面積.
3 混合運轉模式下的模擬結果
為達到低能耗、低污染的目標,在發動機與電機混合運轉模式下,本文中設定發動機的節氣門開度不變,以電機輸出扭矩調整發動機輸出端的負載,進而控制發動機轉速的方式,維持發動機在最佳經濟轉速范圍運行,再通過控制CVT的減速比達到目標車速.
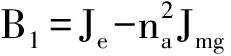
發動機工作點的變換則依照不同的運轉模式與道路負載需求進行變化.在本文中,選定車輛從90 km/h到150 km/h區間內進行急加速,設定發動機工作點的扭矩Te_d為84.38 Nm、轉速re_d為2 400 r/min、節氣門開度θe_d為72%.該工作點位于BSFC最小的范圍內,不僅需求功率足夠,而且油耗與污染較低.由鍵合圖模型推導出的動態方程式(1)-(6),本文應用Matlab對上述方程式進行編程運算,在NEDC2000的行車模式下進行模擬,結果如圖4、5、6所示.
a.車速;b.理想功率、需求功率、實際輸出功率.圖4 車輛性能參數曲線Fig.4 Curve of vehicle performance parameter
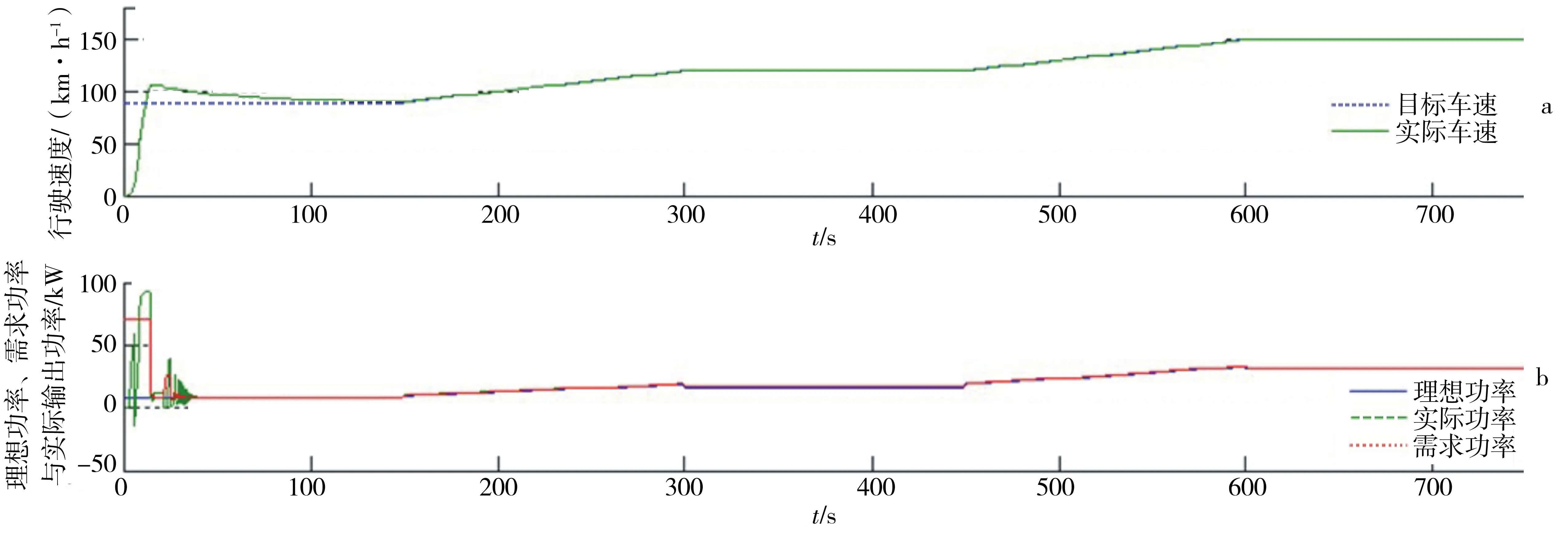
圖4a為車速變化部分,由于實際輸出由零開始,因此,開始時需求功率較大,圖4b所示,會產生一個瞬時峰值,當速度接近穩定時,需求功率相對地也趨于穩定.在圖5中,在目標功率一定情況下,因開始時后輪轉速較小,故后輪目標扭矩呈現最大值,然后,當系統逐漸趨于穩定時,后輪目標扭矩雖有增大但也是漸漸趨于穩定.圖6中顯示,電機開始時因受到發動機啟動的影響,反向旋轉,故轉速為負值,此時輸出功率也為負值,即為發電機發電狀態;當系統逐漸趨于穩定時,電機的轉速也逐漸轉為正值,通過不斷調整發動機的轉速,從而控制發動機在所設定的操作點上運轉,因此,在保證車輛動力性的情況下,降低了燃油消耗及污染排放.燃油消耗及污染排放依據有效燃油消耗率BSFC( brake specific fuel consumption)的規定,可得出下列數據,如表2所示,并與車輛實際排放進行了對比,結果顯示,該混合動力系統在油耗上可改善約14%,污染約可改善3%~17%.
a.發動機實際輸出扭矩;b.后輪目標扭矩.圖5 車輛扭矩曲線圖Fig.5 Curve of vehicle and the rear wheel torque
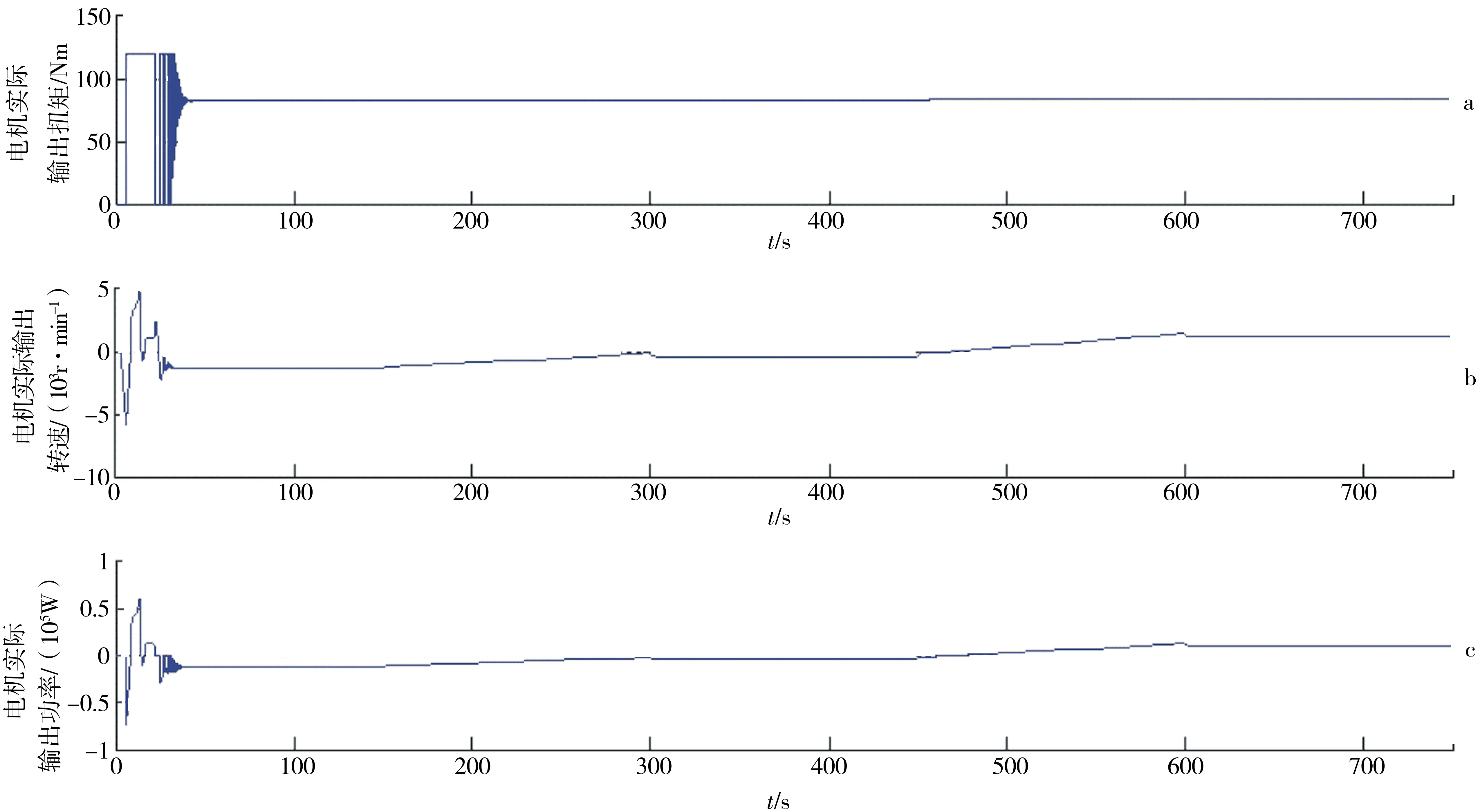
a.電機實際輸出扭矩;b.電機實際輸出轉速; c.電機實際輸出功率.圖6 電機性能參數曲線圖Fig.6 Curve of motor performance parameter

表2 發動機油耗與污染排放數值
4 結論
本文研究的混合動力汽車采用逆向差速器作為動力耦合機構,將發動機與電機的動力耦合后共同為ECVT提供動力輸出.為實現低能耗、低污染的目標,在混合運轉模式下,將發動機的工作點設置在最佳經濟轉速內運行.
應用功率鍵合圖方法建立了系統結構的數學動態模型的建模,得到了該模型的動態方程式,仿真結果顯示:應用逆向差速器動力耦合機構在滿足車輛后輪需求功率的情形下,通過控制發動機在最佳經濟轉速范圍下運行時,HEV各動力組件均能在高效率范圍內運行,實現了低污染、低能耗的目標;應用功率鍵合圖方法可準確地模擬車輛在NEDC2000行車模式下發動機、電機/發電機的性能變化曲線,因此,該方法進行混合動力驅動系統中多能量耦合的動態建模具有一定的優勢.
[1] 鄧元望,王耀南,陳潔平.混合電動汽車驅動系統的分類方法及應用[J].農業機械學報,2006,37(5): 22-25. DENF Y W, WANG Y N, CHEN J P.Classification on the drivetrain of the hybrid electric vehicles and its application[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(5): 22-25.DOI:10.3969/j.issn.1000-1298.2006.05.006.
[2] 鐘勇.基于CVT 的類菱形混合動力電動汽車系統研究與仿真[D].長沙:湖南大學,2005. ZHONG Y.Systematic research & simulation on quasi_rhombus hybrid electric vehicle equipped with CVT[ D ].Changsha: Hunan University, 2005.
[3] BUTLER K L, EHSANI M, KAMATH P.A matlab-based modeling and simulation package for electric and hybrid electric vehicle design[J].IEEE Transaction on Vehicular Technology, 1999,48(6):1771-1778.
[4] POWELL B, ZHANG X, BARASZU R, et al.Computer model for a parallel hybrid electric vehicle (PHEV) with CVT[Z].American Control Conference, Chicago, 2000.
[5] KYOUNGCHEOL O,JEONGMIN K,DONGHO K, et al.Optimal power distribution control for parallel hybrid electric vehicles[C].IEEE International Conference on Vehicular Electronics & Safety,2005:79-85.DOI:10.1109/ACC.2008.876653.
[6] HOEIJMAKERS M J, FERREIRA J A.The electric variable transmission[J].IEEE Transactions on Industry Applications, 2006,42(4):1092-1100.
[7] 林秋豐,關智元.新型逆向差速齒輪式車輛復合動力系統能量管理策略性能比較[Z].第十二屆國際車輛工程學術研討會,屏東,2007. LIN CH F, GUAN Z Y.Performance comparisons of energy management strategy for the reverse differential gear type of hybrid electric system[Z].The 12th International Symposium on Vehicle Engineering, Pingdung, 2007.
[8] BORUTZKY, WOLFGANG.Bond graph modelling of engineering systems : theory, applications and software support[M].New York: Springer Science+Business Media, LLC,2011.
[9] KARNOPP D,ROSENBERG R C.Application of bond graph techniques to the study of vehicle driveline dynamics[J].Journal of Fluids Engineering, 1972,92(2):355-362.
[10] POWELL B K, BAILEY K E, CIKANEK S R.Dynamic modeling and control of hybrid electric vehicle powertrain system[J].IEEE Control Systems,1998,18(5):17-33.
[11] 王濤,王青,李勇.基于鍵合圖的電動汽車電機驅動系統建模與仿真[J].農業工程學報,2011, 27 (12) : 64-68. WANG T,WANG Q,LI Y.Modeling and simulation for powertrain of electric vehicle based on bond graph[J].Transactions of the Chinese Society of Agricultural Engineering,2011,27(12):64-68.DOI:10.3969/j.issn.1002-6819.2011.12.013.
[12] 文明,谷中麗,孫逢春.履帶車輛電傳動系統鍵合圖建模與仿真分析[J].車輛與動力技術,2003(4):41-45. WEN M,GU Z L,SUN F C.Bond graph modeling and SIMULINK simulation of electric drive system for tracked vehicles[J].Vehicle & Power Technology,2003(4):41-45.DOI:10.3969/j.issn.1009-4687.2003.04.011.
(責任編輯:孟素蘭)
Model and simulation for hybrid electric vehicle based on bond graph
WANG Tao1, WANG Kai2, LIN Chiufeng3, CHUANG Tsunghsien3,LI Zhiyuan1
(1.School of Quality Technology Supervisor, Hebei University, Baoding 071000, China; 2.College of Mechanical and Equipment Engineering, Hebei University of Engineering, Handan 056000, China; 3.School of Engineering, Pingtung University of Science and Technology, Pingtung 000912, China)
In this paper, the hybrid system is studied based on an inverse differential gear power coupling mechanism, which combines the motor’s good performance at the low speed and low noise with the engine’s good performance at high-speed and energy supply chain integrity.According to power and speed demanded under different driving conditions, energy management modes of the hybrid system are planned.Hybrid cooperation power output mode is focused in this paper.The vehicle dynamics model of hybrid cooperation mode is built by power bond graph theory and its dynamic equations are derived.Then Matab is applied for programming and simulation.The simulation results show that the hybrid power system with an inverse differential gear power coupling mechanism is able to meet the need of the rear wheel output power and enhances the vehicle dynamic and reduces fuel consumption and pollution emissions, by fixing the engine in the current operating points to continue to run efficiently and controlling the dynamic parameters of the components of the entire hybrid system.Power bond graph method can accurately simulate the change performance curved lines of the vehicle engine and the motor/generator in NEDC2000 driving mode.Therefore, this method has a certain advantages for dynamic modeling of multiple energy coupling of the hybrid drive system.
inverse differential gearbox;hybrid electric vehicle;bond graph;model;simulation
10.3969/j.issn.1000-1565.2017.04.014
2016-05-16
河北省科技支撐計劃資助項目(13214412);河北省教育廳高等學校青年基金項目(E2011206);河北省人社廳留學人員科技活動重點項目(2012121603);河北大學青年教師基金項目(2010208;2011-42).
王濤(1982—),男,山東泰安人,河北大學副教授,博士,主要從事新能源汽車關鍵技術研究. E-mail: taowangustbntu@sohu.com
林秋豐(1964—),男,臺灣屏東人,“國立”屏東科技大學教授,博士,主要從事混合動力汽車技術研究. E-mail: chiufeng@mail.npust.edu.tw
U461
A
1000-1565(2017)04-0419-07
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15