基于物聯網的多移動機器人協作構圖的研究
2017-09-03 10:57:36安徽理工大學施澤華
電子世界 2017年16期
安徽理工大學 施澤華
基于物聯網的多移動機器人協作構圖的研究
安徽理工大學 施澤華
針對單移動機器人構圖效率低、完整性差,本文研究了基于物聯網的多移動機器人協作構圖的問題。首先,選用了具有更強魯棒性的混合式控制結構,并利用基于RSSI的物聯網定位技術,實現多移動機器人的實時定位。接著,采用了一種基于三角形動態分區的算法用于探測未知環境。實驗結果表明該設計相較單移動機器人更高效、更完整。
移動機器人;物聯網;三角形分區;協作構圖
1 引言
近些年,隨著智能移動機器人不斷應用于各種復雜任務中,如路徑規劃、導航等。這就要它提前感知外界信息,即預先構圖或者邊執行任務邊構圖。而傳統的單移動機器人構圖的效率和完整性都不高,因此本文結合物聯網RSSI技術,并采用混合式控制結構的設計,使多機器人間分布探索,集中建圖。目前最新的多移動機器人協作構圖算法有虛擬力探測算法、擴展卡爾曼濾波器的全局地圖構建法[1]等,而本文采用的基于三角形動態分區的算法是另一種有效算法,能高效完整地探測未知環境。
2 控制結構
本文選用混合式控制結構,即機器人間分布探索,集中建圖,如圖1。它集合了集中式和分布式控制[2]的優點,魯棒性更強。
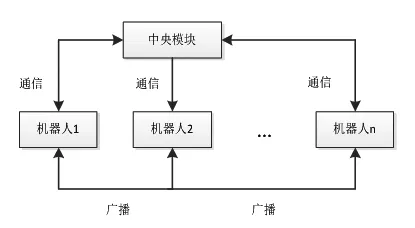
圖1 多移動機器人組的混合式控制結構
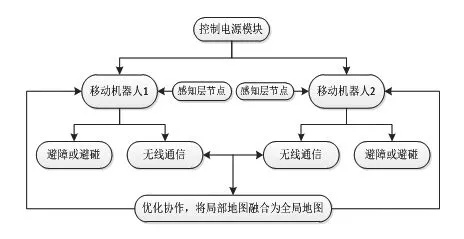
圖2 協作構圖流程
每個移動機器人獨立探測自己的環境地圖,同時機器人間可互相通信,告知各自位置信息并分享地圖。中央模塊會融合各機器人傳送來的信息,并執行任務分配,統籌確認各機器人下一目標。
3 基于RSSI的移動機器人動態定位
物聯網的定位信息是由其感知層獲取的,目前在基于測距的物聯網定位算法中,信號強度測距(RSSI)法[3]由接受節點測量接收功率,計算傳播損耗,再用經典信號傳播模型將其轉化為距離。該方法無需增加額外硬件,并易于實現,因而更適用于物聯網環境下移動機器人的實時定位。
4 流程圖
多移動機器人協作構圖的流程如圖2,以兩臺機器人為例。移動機器人由感知層節點感知外界信息,并經串口傳給處理器,建立局部地圖,再通過物聯網的無線通信交互信息,達到信息共享和融合。這里物聯網的無線通信采用UDP/TCP雙協議、雙通道ZigBee通信模塊設計。
5 協作探測策略
5.1 三角形動態分區算法
合理的探測算法能有效避免重復探測,具有較高的地圖融合匹配度。分區探測算法一般有方形分區、圓形分區和三角形動態分區[4]。由于方形分區和圓形分區僅局限于柵格地圖,故采用了基于三角形動態分區的算法。
三角形動態分區算法,即由新探測到的點特征將不確定區域分成若干個相鄰的、無重復的三角子區域,再分別探測子分區構建地圖,直到沒有不確定區域。
5.2 基本探測行為
移動機器人的探測行為有以下六類:
(1)搜索行為
當不確定三角子區域時,移動機器人執行搜索行為。當發現探測到的三個特征點不在一直線上,即被定為三角探測子分區。
(2)探測行為
移動機器人到達一個未探測三角區域時,首先確定所需探測三角區域三邊屬性值,再根據屬性值決定探測方向。每探測完一條邊,需融合該信息并更新屬性值,再值確定下次探測的邊。
(3)前往目標點行為
在中央模塊分配目標任務點后,執行該行為,前往待測區域。(4)等待行為
當機器人探測完一個三角子區域或完成所有分配的任務時,執行該行為。
(5)避障行為
在機器人前往目標任務點,發現前方有物體阻礙時,由感知層信息進行旋轉避障。
(6)避碰行為
在機器人檢測到前方可能會與另一機器人相碰,執行該行為。設定離相碰點較近的為優先級,可先前行。
6 實驗仿真
如圖3所示是兩移動機器人在仿真環境的地圖模型上先后探測到三個特征點,灰點即特征點。起始給機器人一個初始位置和方向,設其探測范圍1m。
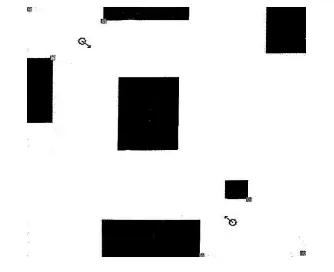
圖3 機器人最先探測到3個特征點
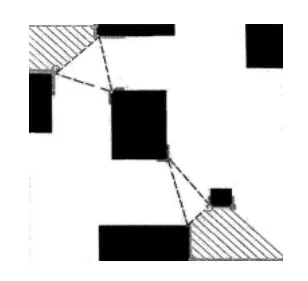
圖4 第一次完成三角區域探測

圖5 構圖完成后的全局地圖
如圖4,兩機器人探測完完第一個三角區域,斜線陰影區域為已探測區域,虛線邊界區域是新探測區域。
同理,當所有移動機器人探測任務完成,無不確定區域,中央模塊對全局地圖融合更新,如圖5。
兩機器人前進速度為150mm/s,總耗時6.76min。相同環境下,使用最佳視角法的單移動機器人系統,用時17.53min,且會多次探測已測區域。因此,本文設計的多移動機器人協作構圖系統達到了預期成效。
7 結論
本文設計了一種基于物聯網的多移動機器人協作構圖系統,采用混合式控制結構。系統利用基于RSSI的物聯網定位技術實現實時定位,并采用三角形動態分區算法進行環境探測。實驗仿真結果表明,該設計相較單移動機器人建圖系統更高效、更完整。
[1]遲健男,徐心和.移動機器人即時定位與地圖創建問題研究[J].機器人,2004,26(1):87-91.
[2]譚民,范永.機器人群體協作與控制的研究[J].機器人,2001,23(3): 285-288.
[3]黃天祥,王敬東.基于LQI和RSSI改進的DV-Hop定位算法[J].計算機與現代化,2009,(1):76-80.
[4]張洪峰,王碩.基于動態分區方法的多機器人協作地圖構建[J].機器人,2003,25(2):156-162.
施澤華(1994—),男,江蘇淮安人,碩士在讀,研究方向:電氣智能化方向。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
制造技術與機床(2017年3期)2017-06-23 08:11:21
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
民生周刊(2012年10期)2012-10-14 09:06:46