基于交點質心算法的人員區域定位系統研究
2017-09-08 04:13:31蔣春利李政林羅文廣王志
現代電子技術 2017年17期
關鍵詞:物聯網
蔣春利+李政林+羅文廣+王志

摘 要: 采用物聯網技術設計了一套地下人員區域定位的安全管理系統。該系統采用智能安全識別卡作為當前移動節點坐標位置的發出者,無線定位基站作為移動節點坐標位置的接收者,基于交點質心定位算法定位地下工作人員的三維坐標位置,并通過以太網將采集到的坐標信息傳輸至地面監控調度中心。地面監控調度中心根據接收到的信息自動記錄地下工作人員的相關信息,并自動統計生成考勤報表。整套定位系統環境適應度強,可實現對環境信息的采集和工作人員的定位,通過與傳統的四邊測量法實驗結果進行對比,發現基于交點質心的三維空間定位算法定位效果更好,誤差更小。
關鍵詞: 物聯網; 智能安全識別卡; 無線定位基站; 交點質心定位算法
中圖分類號: TN911?34; TP393 文獻標識碼: A 文章編號: 1004?373X(2017)17?0027?05
Research on staff regional positioning system based on intersection centroid algorithm
JIANG Chunli, LI Zhenglin, LUO Wenguang, WANG Zhi
(School of Electrical and Information Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China)
Abstract: A safety management system for underground staff regional positioning was designed by means of Internet of Things technology. The intelligent security identification card is taken as the initiator of the current mobile node coordinate location in the system, and the wireless positioning base station is taken as the receiver of the mobile node coordinate position. The three?dimensional coordinate location of the underground staff is located on the basis of intersection centroid localization algorithm. The coordinate information acquired through Ethernet is transmitted to the ground monitoring and dispatching center. The ground monitoring and dispatching center records the relevant information of the underground staff automatically according to the received information, and analyzes and generates the attendance report automatically. The whole positioning system has strong environment adaptability, and can acquire the environment information and locate the staff. In comparison with the experimental result of the traditional four?side measurement method, it is found that the three?dimensional space localization algorithm based on intersection centroid has better positioning effect and smaller error.
Keywords: Internet of Things; intelligent security identification card; wireless positioning base station; intersection centroid localization algorithm
0 引 言
基于多因素下考慮的安全型管理系統,其設計要求需要對地下的活動環境進行監控,還需要具備及時調度地下人員與設備自動化操作的能力,從源頭上提高地下工作的生產效率和安全性[1]。當前,地下有線監控系統發展得越來越快,作為地下安全生產的重要因素,普遍采用工業總線的方式,利用電纜、光纖搭建起地下監測系統與地面信息中心的平臺媒介,這在一定程度上可以確保地下生產工作的有序進行,從真正意義上起到安全監控的作用[2?3]。但是由于地下工作環境的復雜性、有線監控系統自身的局限性、不同基站之間的相互干擾等因素,很難對溫度、濕度、氣壓、風力速度、瓦斯濃度、煤礦塵含量等不利于地下安全生產的性能指標實施全面高效的監測。隨著移動通信領域和電子器件領域的快速發展,低功耗、具有可編程計算、多參數感應和無線通信能力的傳感器開始得到實際應用。無線傳感器網絡在動態、惡劣、陌生環境下實施靈活可靠的監測與定位起著至關重要的作用[4?7]。
本文結合地下環境的特點,基于無線傳感器網絡技術,設計了一套地下人員區域定位的安全管理系統,該系統主要由無線定位基站(簡稱讀卡器)、智能安全識別卡(簡稱識別卡)、數據通信轉換器三大部分組成,能夠實時準確地監測地下生產環境,進行災害預警和跟蹤定位地下工作人員,使管理人員能夠時刻掌握地下工作人員的位置、人數、現場分布和人員的工作路徑,實現科學管理,提高勞動生產率;一旦有緊急情況發生時,救援人員也可以根據該定位系統所提供的人員位置坐標信息制定相應的救援計劃,確保所有被困人員在最短的時間里得到救助,將人員傷亡和經濟損失降低到最小范圍。endprint
1 移動目標下的定位算法
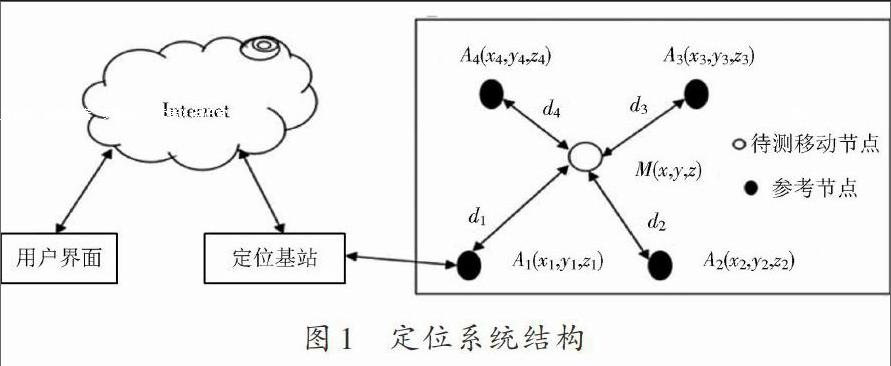
多個定位基站、參考節點、用戶界面和通信中的鏈路構成了無線傳感器網絡模型。以降落傘方式放置的參考節點部署在整個監測區中,或者由人工主動安置在被監控對象內,自發式搭建網絡[8?10]。參考節點主要用于收集周圍的物理量數據,再將數據逐條傳遞給基站,并通過互聯網傳送到監測中心。同時,控制中心產生相應的控制信號,基站和無線傳感器收到相應信號后,會產生新的監測任務或者收集監測到的移動節點信息,如圖1所示。
移動節點主要由單功能的通信設備構成,設備能夠單獨對信號進行編碼、解碼,含有位置的信息通過信號處理后發送出去,同時也能接收來自基站的定位控制信息,并通過已確定的參考節點無線接收器接收、處理后傳輸至網關協調器。當地面監控調度中心檢測到信號時,上位機的反饋信號將會傳送給網關協調器,采用有線傳輸方式傳送至地面監控調度中心,通過調度中心原有的數據庫信息與之對比,根據對比結果鎖定人員身份,之后按先前給定的RSSI定位算法來確定鎖定人員的實際位置。為了準確完成移動節點的定位,在整個系統中,一定要保證所有的移動節點在任何情況下都能被3個參考節點或大于3個參考節點的路由器接收,從而保證更加準確地確定移動節點的位置信息[11]。
為改善三維空間定位精度低的情況,本文提出一種三維空間交點質心算法。該定位算法擁有較高的空間定位精度,但對參考節點有很高的要求,需要篩選出距離移動節點最近的幾個參考節點,并通過RSSI測出其與移動節點的距離,根據測距結果搭建空間模型,構造出相鄰兩球心連線與球面的交點,根據交點與質心及兩球心的距離等已知因素求出待測節點在空間中的三維坐標量。假設地下環境中的移動物體(即地下工作人員)經過距離后的路徑損耗為:
(1)
式中:為待測移動節點在處接收到參考節點信息的信號強度;表示待測節點到參考節點之間的距離;為待測移動節點在處接收到參考節點信息的信號強度;表示參考距離;為路徑衰落指數,在不同的環境下取值不同,一般取2~5;表示均值為0的高斯分布隨機變量,標準差范圍為4~10。
設選中的4個參考節點分別為通過RSSI測距得到待測移動節點到參考節點的距離分別為可得到以為球心,為半徑的4個三維空間球面方程為:
(2)
(3)
(4)
(5)
然后將參考節點兩兩連線,可得到6組方程:
(6)
(7)
(8)
(9)
(10)
(11)
聯立式(2),式(3),式(6)解得與的交點求得:
(12)
比較的大小,取中間大小的兩個點為第一組的交點,記為。同理,聯立其他公式,可以得到另外5組交點。根據以上12個交點坐標,可以求得待測移動節點的位置坐標為:
(13)
2 系統設計及構成
2.1 無線定位基站
基站起到了無線傳感器網絡和外部網絡數據之間交換的橋梁作用,基站將采集到的數據信息通過無線網絡媒介發送給外部網絡,管理控制信息或者新的任務信息通過無線定位基站控制節點的方式發送給無線傳感器網絡[12]。本文采用 KJ1080B無線定位基站,該基站主要由無線接收、SPI通信、E2PROM存儲器及信號輸出等模塊組成,使用意法半導體推出的CORTEX M0作為主芯片,主頻最高可達48 MHz,內含32 KB的FLASH程序存儲器,8 KB的SRAM數據存儲器以及高性能的32位ARM,1路以太網通信和1個看門狗(有獨立的看門狗時鐘),原理圖如圖2所示。
2.2 智能安全識別卡
智能安全識別卡采用nRF24LU1P作為主芯片,它是一款世界通用ISM頻段在2.4~2.5 GHz的單片無線收發器芯片。無線收發器包括調制器、功率放大器、頻率發生器、控制器、晶體振蕩器、增強型SchockBurstTM模式、解調器。可以通過SPI的片選引腳CSN,SPI時鐘引腳CLK,SPI的MOSI與MISO等對信號的功率、選擇頻道和通信協議等進行相關設置,具有極低的電流消耗:當發射功率為-6 dBm且工作在發射模式時,電流的有效消耗為9.0 mA;工作在接收模式時,電流的有效消耗為12.3 mA;工作在待機和掉電模式時,則有更低的電流消耗。智能安全識別卡原理框圖如圖3所示,傳輸示意圖如圖4所示。
2.3 參考節點
參考節點接收器主要針對移動節點設置好參照節點,便于準確地對其定位,然后將測量信息量傳輸出去。整個參考節點路由器是由外部電源模塊等相關外接電路和CC2430芯片組成,電路基本構成如圖5所示。
使用較少的元器件搭建CC2430外圍電路能夠有效的完成接收和發送功能,可見CC2430芯片的功能非常強大,衡變器必須連接到天線上,這樣,全部電路產生的信號都經過同一根天線衡變之后發送或者接收,保證信號可靠。CC2430芯片在正常模式下的最大輸出功率為0.6 dBm,即使處于完全空曠的場地上其最大的通信范圍為100 m。如果使其工作在多變且復雜的環境中,相同路徑傳輸的能量損耗也將會大幅度增加,使信號傳輸的距離變短,嚴重時甚至不能滿足實際需求。當監測范圍不夠時,考慮到增大發射功率能夠有效地覆蓋全部區域,因此可以增加一個前端放大器來增大功率。采用CC2591作為前置芯片是因為CC2591的電路設計簡單,使用方便,內部集成度高,在一定范圍內能增加覆蓋面,使得CC2430的節點覆蓋更加有效,同時可適當減少路由器數量,能在更短的時間內傳送完。考慮到移動節點位置信息發送無周期性,為保證安全起見,確保CC2430處于工作狀態是必要的。電源最好是使用地下的動力電源進行供電,同時還要配備獨立電源,保證動力電源線路發生故障時,仍然能正常工作。endprint
預先設置好的固定參考節點路由器通電后第一時間就會開始搜索附近是否有其他網絡,并發出加入請求,一旦加入成功后,工作指示燈就會點亮,之后開始對移動節點信號進行搜尋,搜尋到后接收的信息,同時狀態燈中的紅燈將會被點亮,系統根據當前接收到的信號進行分析判斷,即信號頻率、頻段等是否匹配,如果匹配則發送確認信號給它,并對接收的信號強度及信號中包含的位置信息等進行信號處理,處理后的信息量將通過設置相關寄存器以最快的傳輸路徑傳送給網關協調器,傳輸路徑是由各個路由器和基站等網絡層組件構成,其優點是可操作性強。
2.4 移動節點
為了保證地下安全生產工作的順利進行,移動節點電路要求具有能量損耗低,工作性能穩定可靠,重量體積都不大的特點,這里選擇CC2430芯片作為移動節點,它的特點是耗能低,發射功率低于1 mW。正常工作時,微處理器的運行頻率為32 MHz,工作在接收模式時能量損耗為27 mA,工作在發射模式時為25 mA。移動節點的工作時間不是連續的,當工作一次發送完定位信號,在接收到回復信息后立刻進入到休眠狀態。這樣,電源的使用時間得到了更好的提高,當進入休眠狀態時,芯片的靜態電流為0.9 A,改變電流,隨時能喚醒芯片。CC2430能在短時間內實現休眠狀態與工作狀態的相互切換,移動節點硬件結構圖如圖6所示。
CC2430芯片內部集成了8051 CPU,不需要外接微型處理器,僅需要很少的外圍設備連接就能完成數據信息的接收、發送及處理。地下工作人員需要佩戴各自的射頻芯片,芯片中含有各自的地址信息,每個人都不盡相同,當工作人員走入某個參考節點輻射范圍內或者是多個參考節點的輻射范圍內,隨身的射頻芯片能周期性的自動發射攜帶的獨特信息等,同時,也會自動接收來自上層設備發出的確定信息或者控制信號,因為參考節點在接收到信號后會反饋發出一個確定信號,確定信號一旦傳送到射頻芯片后,射頻芯片將會停止工作進入休眠模式,等待一分鐘后再次啟動工作模式。
3 系統仿真與測試
本文改進了傳統的基于質心算法的三維空間定位算法,首先要測量出各個參考節點與待測移動節點的距離量在本文中采用RSSI距離損耗模型求得,通過選取各個參考節點為圓心,半徑為各個節點到移動節點的距離量從而可以畫出四個三維空間的球面,四個球面圍成的一個小空間區域為待測移動節點的所處區域,然后根據已知的距離量即邊長,由三角公式計算出兩兩球心間距及球心到球面12個交點的距離,最后將這12個交點的質心作為待測點的位置估計。模擬一個長1 000 m,寬8 m,高5 m的三維隧道模型,從隧道的入口開始,均勻放置參考節點,在數據中添加方差為20,均值為4的隨機噪聲,用來模擬實際環境中反射、干擾等影響,如圖7所示,總共設置有22個參考節點,參考節點的具體位置坐標如表1所示。
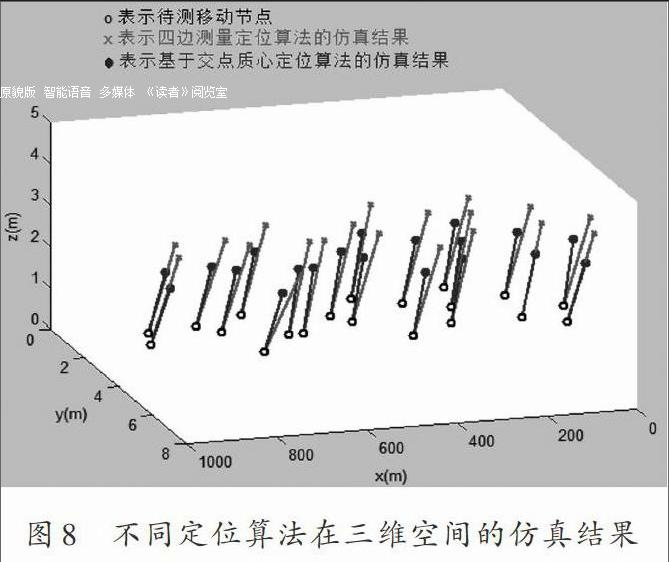
針對傳統的RSSI算法與三維空間交點質心算法在定位方面進行仿真對比,隨機測試20組待測的移動節點數據,如表2所示,在三維空間中,不同定位算法的仿真結果如圖8所示。“×”代表四邊測量定位算法的仿真結果,“●”代表基于交點質心定位算法的仿真結果。
通過圖9可以看出,三維空間交點質心算法與傳統的RSSI測距的四邊測量法相比,誤差相對比較平穩,定位精度較高,相對而言,三維空間交點質心定位算法具有更好的定位效果,能夠更好地滿足三維空間定位的需求。
由于施工人員的進出時間不同及進出數量的不同,讀卡器的讀取順序和數量自然也不相同,讀卡器的數據能及時反映到地面監控調度中心的系統軟件中,并體現到大屏幕上,使考勤情況一目了然。考勤卡可以佩戴于工作人員身上任何位置,無需拿出來就能自動識別,準確度高,操作方便,使管理人員在監控室就能及時掌握施工現場的具體情況。管理人員根據地面監控調度中心的定位數據反饋,開始測試網關協調器。網關協調器上能夠連接不同種類的傳感器,進行地下各種環境參數(溫度、濕度、氣體濃度)的實時采集,對采樣數據進行處理后與原先設定的臨界值進行對比,如果環境指示燈點亮則表示超過臨界值,通過網絡總線將數據傳送至地面的監控室,監控室系統會立即分析收到的數據,如果參數屬于危險值范疇內,會立刻發送報警信號,同時通知所有人員離開危險區域。在接收用戶請求之前,可以預先設置符合要求的環境信息值。當在地面監控調度中心時可以通過電腦終端進行檢測和控制,當離開地面監控調度中心時,可以通過手機終端進行遠程檢測和控制,實現實時監控的功能。
4 結 語
本文的地下人員區域定位系統會根據接收到的信息自動記錄人員姓名、工號、部門、進出時間、路徑等,并自動統計生成考勤報表,為隧道、井下施工提供考勤管理信息。識別卡可以記錄出工作人員在地下的工作情況,即工作人員何時經過的監測點,在某一區域的工作時間。即使工作人員佩戴識別卡開車進入隧道,無線定位基站也能讀取到移動人員的位置信息。為了提高定位系統的精度,本文選擇三維空間交點質心定位算法,通過與傳統的RSSI測距的四邊測量法實驗結果進行對比,發現三維空間交點質心定位算法具有更好的定位效果。
注:本文通訊作者為羅文廣。
參考文獻
[1] 郝維來,白潔.基于RSSI的煤礦井下人員定位系統研究[J].現代電子技術,2016,39(4):48?50.
[2] 郭小成,劉喜鳳.基于無線信號傳播損耗模型的RFID定位系統[J].科技創業家,2013(8):1?2.
[3] 蔡優筆,王建中.基于搜索的RSSI節點定位算法[J].杭州電子科技大學學報,2012,31(4):49?52.
[4] SMITH A, BALAKRISHNAN H, GORACZKO M, et al. Tracking moving devices with the cricket location system [C]// Proceedings of the 2nd International Conference on Mobile Systems, Applications, and Services. Boston: ACM, 2004: 190?202.
[5] HIGHTOWER J, WANT R, BORRIELLO G. SpotON: an indoor 3D location sensing technology based on RF signal strength [R]. Seattle: Department of Computer Science and Engineering, University of Washington, 2000.
[6] NI L M, LIU Y H, LAU Y C, et al. LANDMARC: indoor location sensing using active RFID [J]. Wireless networks, 2004, 10: 701?710.
[7] 任維政,徐連明,鄧中亮,等.基于RSSI的測距差分修正定位算法[J].傳感技術學報,2008,21(7):1247?1250.
[8] 賴旭芝,王金鑫,曾桂秀,等.基于三維體質心的無線傳感器網絡節點定位算法[J].系統仿真學報,2008,15(20):4104?4111.
[9] 劉玉恒,蒲菊華,赫陽,等.無線傳感器網絡三維自身定位方法[J].北京航空航天大學學報,2008,34(6):647?651.
[10] 李輝,李臘元,李方云.一種新型的無線傳感器網絡三維定位機制[J].計算機工程與應用,2010,46(14):115?118.
[11] 林瑋,陳傳峰.基于RSSI的無線傳感器網絡三角形質心定位算法[J].現代電子技術,2009,32(2):180?182.
[12] BAHL P, PADMANABHAN V N. RADAR: an in?building RF?based user location and tracking system [C]// Proceedings of 2000 the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies. Tel Aviv, Israel: IEEE, 2000: 775?784.endprint
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06