基于STM32的變電站巡檢機器人系統設計
2017-09-08 01:29:05李祥崔昊楊皮凱云束江李鑫許永鵬盛戈皞
現代電子技術 2017年17期
關鍵詞:變電站
李祥+崔昊楊+皮凱云+束江+李鑫+許永鵬+盛戈皞


摘 要: 針對變電站傳統人工巡檢方式存在工作量大、缺乏系統分析和實時故障分析等缺點,設計了基于STM32芯片的變電站智能巡檢機器人,具有自主循跡、智能診斷分析、太陽能充電、機械手臂及時切除故障等功能。詳細闡述了硬件結構和軟件算法設計方案,研制出巡檢機器人樣機,并對樣機通信系統、控制系統、智能識別診斷系統進行了測試分析。測試結果表明,該巡檢機器人系統能夠對電力設備進行有效巡檢與故障診斷,巡檢效率高、安全性可靠,因此具有較高的經濟效益和較強的現實意義。
關鍵詞: 變電站; 巡檢機器人; 太陽能; 機械手臂; 紅外檢測
中圖分類號: TN02?34 文獻標識碼: A 文章編號: 1004?373X(2017)17?0150?04
Design of substation inspection robot system based on STM32
LI Xiang1, CUI Haoyang1, PI Kaiyun1, SHU Jiang1, LI Xin1, XU Yongpeng2, SHENG Gehao2
(1. College of Electronics and Information Engineering, Shanghai University of Electric Power, Shanghai 200090, China;
2. Department of Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract: Since the traditional manual inspection method of substation has the disadvantage of heavy workload, and lacks of systematic analysis and real?time fault analysis, an intelligent substation inspection robot based on STM32 was designed, which has functions of automatic tracking, intelligent diagnosis analysis, solar energy recharging, and timely fault removal by mechanical arms. In this paper, the design schemes of hardware structure and software algorithm are elaborated in detail, and the test analysis for its communication system, control system, and intelligent identification and diagnosis system is performed. The test result shows this robot can inspect the electric equipment and diagnose the fault efficiently, and has high inspection efficiency and reliable security. Therefore, it brings a high economic benefit and has strong practical significance.
Keywords: substation; inspection robot; solar energy; mechanical arm; infrared detection
0 引 言
目前,電力設備向高功率、高可靠性、高智能化方向發展,增加了日常運維與檢測的難度。在變電站無人值守的趨勢下,傳統的巡檢方式及故障診斷技術越來越難以滿足復雜設備診斷的需求[1]。建立廣域范圍的設備狀態監測網絡以及遠程專家診斷系統,對保證所有設備正常運行、提高生產效率,節約維修費用有著重大意義。
傳統變電站設備巡檢工作主要以運維人員定期巡視及紅外測溫為主,但受到檢測人員的經驗、技術水平的影響,往往出現漏測現象。同時,利用現有檢測儀器,檢測人員難以對數據進行集中管理,歷史數據深度挖掘效率較低,從而在很大程度上制約了帶電檢測技術的發展。
變電站智能巡檢機器人的研究及應用給上述問題帶來了新的解決途徑,為電力設備能夠得到及時、有效、全面、智能的診斷維護提供基礎。國內外許多學者開展了變電站巡檢機器人方面的研究[1]。國外研究機器人的典型代表是加拿大魁北克水電站[2]和巴西圣保羅大學[3]。前者研制的變電站巡檢機器人配置了遙控裝置,能夠實現對變電站遠程控制。后者通過在變電站內架起高空行走軌道,研制出適用于變電站內熱點監測的移動機器人[2?3]。國內變電站巡檢機器人的研究也取得了突破性進展,如山東電科院研發了一種輪式巡檢機器人[4?5]能夠在平坦的硬路面上穩定行駛,對變電站設備進行例行巡檢。中科院沈陽自動化研究所研發的軌道式變電站巡檢機器人[6]采用固定軌道方式行進,但受限于攝像頭視角和固定軌道鋪設,很難對變電站設備進行全方位監測。由深圳朗馳欣創科技有限公司與浙江國自機器人技術有限公司研發的變電站巡檢機器人已初步具備站內設備的巡檢,通過在部分變電站實際使用,取得了較好的使用效果。
從上述分析可知,目前研究的變電站巡檢機器人相對于傳統的人工巡檢方式具備一定的優勢,但仍不能滿足設備的故障部位自動切除和異物清除需求,在自主循跡、智能診斷分析方面的性能也有待提升。此外,上述巡檢機器人大都采用單一的電網充電方式,不利于巡檢機器人長時間開展巡檢工作,特別是對關鍵設備點對點長時間重點監測時不能確保電量的充足。針對上述不足,本文對巡檢機器人結構進行了重新設計,研制出了功能樣機,如圖1所示。通過現場試運行表明,該機器人能夠穩定運行,并達到預期設計指標。endprint
1 巡檢機器人系統總體方案設計
結合當前變電站巡檢機器人的應用現狀和變電站實際操作環境,本文對變電站巡檢機器人重新設計,針對傳統巡檢機器人單一的供電方式,以及不具備對故障部位自動切除和異物清除的能力,分別采用太陽能充電和電網充電相結合的供電方式,并在機器人兩側安裝了左右機械手臂,完成對站內設備故障部位的自動切除及巡檢周界的異物清理,從而提升巡檢機器人的實用化和智能化水平。
1.1 巡檢機器人整體結構設計
變電站巡檢機器人系統構成如圖1所示,主要分為機械模塊、傳感器采集模塊、控制模塊、通信模塊、上位機軟件模塊。機械模塊是系統的執行機構,包括金屬車體結構、履帶式底盤、機械手臂、云臺裝置及其他輔助設備。本系統所采用的履帶式結構能夠使得機器人在應對渣石路面、溝坎凸臺、積雪嚴重等復雜作業環境時具有一定的自適應性,以保持車身及攝像機的穩定,從而解決傳統方案攝像機回傳圖像顛簸的問題[7]。
傳感器采集模塊是由多源信息采集器集合而成,包括高清可見光攝像機、紅外熱成像儀、紅外光電避障傳感器、超聲波避障模塊和其他擴展設備。通過上述傳感模塊,機器人能夠獲得電力設備運行狀態的多源信息,并通過無線網絡將采集到的信息上傳至上位機。控制模塊是電路和運動控制系統的集成,包括控制器、驅動電路、信息采集電路、太陽能供電模塊等。通信模塊是機器人與上位機的通信,包括多源信息與控制指令的傳送。上位機軟件模塊是上位機控制平臺與集中控制模塊控制系統的集合,其通過通信模塊建立人機交互平臺。
1.2 巡檢機器人系統構成
大多數電力設備故障表象與溫度異常都具有一定的關聯性。在設備運行中,采用紅外熱輻射技術遠距離非接觸方式測量電力設備溫度,可以在一定程度上衡量電力設備的運行狀況[8]。本文設計的變電站巡檢機器人,通過攜帶紅外熱成像儀、可見光攝像機、機械手臂等代替人工對變電站設備進行巡檢,通過機械手臂進行簡單的故障處理和異物清除。
巡檢機器人采用客戶端/服務端的運行模式,系統結構框架如圖2所示。客戶端位于監控中心的PC機上,負責實時顯示電力設備的多源信息,在線監測設備運行狀況,工作人員也可以通過客戶端上位機發送指令,控制巡檢機器人對特定電力設備進行重點定點監測。服務端位于巡檢機器人本體,核心部分是STM32集中控制器,主要負責導航定位、機器人運動控制、多源信息數據傳輸等。
2 巡檢機器人硬件結構設計
基于STM32變電站巡檢機器人系統控制框圖如圖2所示,該平臺由STM32控制系統、供電系統、無線通信系統組成。系統采用模塊化設計,在此基礎上,增加了太陽能供電模塊、機械手臂模塊。在開發過程中,在集中控制器總線上預留接口以實現新的功能模塊的接入,便于系統升級。
2.1 巡檢機器人控制系統設計
在對巡檢機器人集中控制器開發過程中,選用TI公司生產的STM32F103作為核心處理單元,其內核為ARM公司的Cortex?M3,工作頻率為72 MHz,FLASH為512 KB,有2個12位ADC,5個USART,12個16位計時器,資源完全滿足機器人的運行需求,具有高效率、易擴展、實用性強等優點。
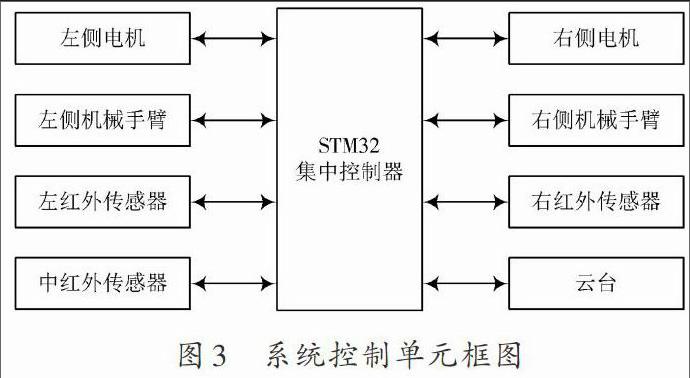
系統控制單元框圖如圖3所示,巡檢機器人集中控制器分別對左側和右側兩組電機、兩組機械手臂、三組紅外避障傳感器及云臺進行控制。本系統采用由兩片半橋驅動芯片和極低內阻的N溝道MOSFET組成的驅動器驅動兩組電機。該驅動器具有足夠的驅動電壓,可快速打開MOSFET溝道,從而提高電機的加速曲率,能夠使機器人迅速啟動、迅速剎車和轉向。集中控制器接收到PC端上位機發送的串口指令后,將串口指令轉化為電源可以識別的PWM信號,從而調整電源的輸出電流,控制電機的運行狀態。巡檢機器人是通過改變左右兩組電機的速度差實現轉向的。
變電站巡檢機器人采用各4個自由度的左右機械手臂,每個自由度都是由一個位置(角度)伺服電機、伺服電機驅動器組成。該舵機有3根接線端,兩條接線端是電源線,另一條為信號控制線,其工作電壓為3~7 V,工作扭矩為13 kg/cm,轉動角度為。集中控制器從上位機客戶端接收到指令,并將其轉化為PWM信號,控制伺服電機轉動的圈數,從而決定機械手臂姿態位置。云臺最大承重為10 kg,運行范圍水平為,垂直為-30°~75°,轉速為1° /s~9° /s,齒輪嚙合間隙小于,共有200個預置位。集中控制器通過RS 485總線與云臺相連,上位機客戶端發送控制指令后經過無線傳輸到達集中控制器,再經過RS 485總線控制云臺的轉動。
2.2 巡檢機器人供電系統設計
傳統變電站巡檢機器人大多采用單一的電網充電方式,這使得巡檢機器人在巡檢過程中需要多次人工充電才能完成巡檢任務。這給長距離、大范圍巡檢路線帶來不便,特別是針對重點監測的可疑設備定點監測時,存儲的電量往往不能滿足實際需要。此外,巡檢機器人在自動充電過程中,充電插頭與充電插座經常會出現對接不成功的狀況,充電成功率難以得到保證。為此,本文采用電網充電與太陽能充電相結合的充電方式。在巡檢機器人車體前后分別安裝太陽能電池板,經太陽能充電轉換模塊,把電能儲存在鋰電池中,不斷為鋰電池補充電量,從而實現巡檢機器人的多元供電,延長了巡檢機器人的工作時長。
系統供電方式如圖4所示,巡檢機器人通過多元充電的供電方式,把電能儲存在24 V鋰電池中。經過DC?DC恒壓恒流電源模塊降壓至12 V,分別為電機驅動器、集中控制器、紅外熱成像儀、可見光攝像機提供穩定的12 V直流電源。設計中云臺為24 V直流供電,可以直接從鋰電池獲取電源。兩組機械手臂和通信模塊直接從集中控制器電源接口獲取5 V電源。
2.3 無線通信系統
巡檢機器人的數據傳輸通過安裝OpenWrt的無線路由端使上位機客戶端與服務端建立點對點的局域網[9]來實現。采用TCP/IP通信協議,能夠保證數據傳輸所需要的速度和實時性。紅外熱成像儀與可見光攝像機拍攝的視頻信號經過壓縮后通過局域網無線傳輸到達上位機客戶端,圖像經過解壓顯示在監控中心的屏幕上。紅外熱像圖能夠有效地檢測出設備運行狀況,配合上位機客戶端的診斷系統[10]能準確對故障部位和故障程度做出判斷。可見光攝像機拍攝的可見光圖像與紅外圖像匹配、融合,能精確識別故障存在點、故障部位。同時儀表設備的可見光圖像能夠在上位機客戶端經過圖像處理,智能讀取儀表數據,實現全站的設備監控。發現異常情況后,工作人員可以通過上位機客戶端發送指令,控制數據通過Socket發送到路由端,路由端把數據包解開后發送到路由端串口。集中控制器與路由端通過STM32建立串口通信,從路由端發出的串口指令控制巡檢機器人車體運行、機械手臂的操作、云臺的旋轉。endprint
3 巡檢機器人系統軟件設計
巡檢機器人系統軟件設計包括上位機客戶端部分和集中控制器控制部分。上位機客戶端軟件運行在Windows系統下,采用C++面向對象的編程語言開發,通過無線傳輸把可見光攝像機和紅外熱成像儀采集到的圖像信息傳輸到上位機客戶端。用戶可以在集控中心通過紅外和視頻窗口實現對機器人現場作業的監控。上位機客戶端通過調用視頻和紅外提供的SDK函數完成視頻的連接、抓取、壓縮、解壓以及播放的過程[11]。在上位機客戶端操控界面上分別有對機器人運動、機械手臂、云臺控制的操作按鍵,通過點擊按鍵向集中控制器發送控制指令,進而完成對機器人的整體操控。
通過上位機獲取到電力設備紅外圖像信息后,在Matlab編程環境下,開發出電力設備故障診斷系統,系統處理界面如圖5所示。
該系統通過BP神經網絡的構建,對200幅圖片樣本進行訓練,在對樣本訓練之前,采用數據歸一化的方法[12]對樣本數據進行轉換處理,目的是避免因輸入輸出數量級差別較大而造成網絡預測誤差較大。數據歸一化方法如下:
(1)
式中:為歸一化前的數值;和為歸一化前數據的最小值和最大值。
4 測試與分析
巡檢機器人樣機研制完成后,首先在路面預鋪設黑色巡檢軌道,打開上位機客戶端選擇自動巡檢模式,巡檢機器人將按照巡檢路徑運行,通過檢測地面RFID標簽停車[13]。通過無線模塊將巡檢電力設備圖像等信息上傳到PC機客戶端。切換成人工巡檢模式后,可通過上位機客戶端發送控制指令到達指令位置進行巡檢。
在站內設備巡檢測試中,通過在上位機客戶端控制變電站巡檢機器人對電力設備進行在線巡檢操作。在監控中心獲得的母線連接處的紅外熱像圖、可見光攝像圖,如圖6所示。經電力設備紅外熱像識別系統識別出該電力設備為母線,再配合可見光圖像判斷出其為C相母線。圖像中管型母線的交叉連接處最高溫度為26.03 ℃,從而判斷出其為正常運行狀態。母線連接處容易出現機械接觸故障,因此,其通常為變電站巡檢的重點監測對象。
在測試過程中,巡檢機器人在執行巡檢任務時,只需要一次交流220 V充電,并不斷利用太陽能充電來完成巡檢任務,通過上位機操控巡檢機器人機械手臂可以順利完成對高壓區域異物的清除。
5 結 語
傳統巡檢方式已很難滿足能源互聯網、智能電網、智能變電站的發展需要,利用巡檢機器人對變電站主設備運行狀態進行在線監測,可極大提高設備的安全性與可靠性。本文在傳統巡檢機器人的基礎上,采用太陽能與電網充電相結合的多元供電方式延長巡檢機器人的工作時間。利用STM32的接口資源,為機器人安裝了兩個機械手臂,使得機器人操作更加靈活,能夠在人工控制下完成簡單的故障切除和異物清除等操作。實際測試表明,巡檢機器人系統采用了多源信息融合技術,操作靈活,界面友好,功能實用,運行效果良好,完全達到了預期目標。該巡檢機器人榮獲第十七屆中國國際博覽會高校展區二等獎的獎項。
參考文獻
[1] 楊旭東,黃玉柱,李繼剛,等.變電站巡檢機器人研究現狀綜述[J].山東電力技術,2015,42(1):30?34.
[2] WANG B, GUO R, LI B, et al. Smart guard: an autonomous robotic system for inspecting substation equipment [J]. Journal of field robotics, 2011, 29(11): 123?137.
[3] PINTO J K C, MASUDA M, MAGRINI L C, et al. Mobile robot for hot monitoring in electric power substation [C]// Transmission and Distribution Conference and Exposition. [S.l.: s.n.], 2008: 1?5.
[4] 李向東,魯守銀,王宏,等.一種智能巡檢機器人的體系結構分析和設計[J].機器人,2005,27(6):502?506.
[5] 周立輝,張永生,孫勇,等.智能變電站巡檢機器人研制及應用[J].電力系統自動化,2011,35(19):85?88.
[6] 毛琛琳,張功望,劉毅.智能機器人巡檢系統在變電站中的應用[J].電網與清潔能源,2009,25(9):30?32.
[7] 郭文增,姜世公,戴成國,等.小型輪/履變結構移動機器人設計及越障分析[J].北京理工大學學報,2015,35(2):144?148.
[8] 陳琳,唐忠,崔昊楊.電氣設備紅外測溫技術的實現[J].電測與儀表,2013,50(4):64?68.
[9] 杜艷,王者龍,楊杰,等.點對點紅外通信裝置的設計[J].電測與儀表,2015,52(7):97?100.
[10] 崔昊楊,許永鵬,盛戈暤,等.基于自適應遺傳算法的變電站紅外圖像模糊增強[J].高電壓技術,2015,41(3):902?908.
[11] 張喜平.變電站遠程圖像監控系統建設經驗[J].電力系統自動化,2005,29(16):97?99.
[12] 張重遠,閆康,汪佛池,等.基于圖像特征提取與BP神經網絡的絕緣子憎水性識別方法[J].高電壓技術,2014,40(5):1446?1452.
[13] CHENG Y H, HE W Y, DI H Y, et al. Study on motion control method for a mobile platform driven by two independent wheels [C]// Proceedings of the Eighth International Conference on Fluid Power Transmission and Control. [S.l.: s.n.], 2013: 461?465.endprint
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45