改進的vibe算法在危化品車輛運輸視頻監控系統中的應用
2017-09-20 09:54:23陳乃想何立平金充充
網絡安全技術與應用 2017年9期
◆陳乃想 何立平 金充充
(浙江萬里學院 浙江 315100)
改進的vibe算法在危化品車輛運輸視頻監控系統中的應用
◆陳乃想 何立平 金充充
(浙江萬里學院 浙江 315100)
由于傳統的vibe前景檢測算法存在無法消除鬼影、受動態背景變化影響較大的問題,本文對傳統的vibe算法進行改進。vibe算法是通過視頻第一幀初始化背景模型,但是當第一幀當中包含前景目標時,鬼影將伴隨著模型的初始化而產生。vibe算法沒有對鬼影做任何處理,導致vibe算法需要花費很長時間才能消除鬼影。針對傳統vibe算法中出現鬼影問題,只需在vibe算法前景檢測之前先獲取相對真實的背景在將真實的背景用來初始化背景模型。因此本文首先通過三幀差分法得到差分圖像,根據直方圖當中有明顯的雙峰特性使用大津分割,二值化處理。最后獲得除運動目標外的部分的真實背景圖片,之后對未填充的背景使用八領域填充和最近領域背景像素填充。再將相對真實的背景圖片用來初始化背景模型。最后使用vibe算法前景檢測順利地消除了鬼影。vibe算法易受動態背景影響較大,那是因為傳統的vibe算法的匹配閥值是固定的,而在危化品車輛運輸過程當中必然會受到光照、風等外部因素的影響,使得vibe前景檢測出現大量的誤檢。因此本文通過用自適應閥值來替換固定匹配閥值的方法,以此來提高vibe算法抗干擾的能力。實驗結果表明,改進的vibe前景檢測算法比傳統的vibe前景檢測算法相比有所改善,在危化品車輛運輸視頻監控系統中不僅提高了檢測的準確度,而且還提高了抗干擾能力。
Vibe算法;運動目標檢測;視頻監控;危化品車輛運輸
0 引言
視頻監控是現代社會安防系統的重要組成部分,視頻監控的處理越來越趨向于智能化和自動化[1]。人們需要其能夠自動采集信息、智能分析和處理數據以及自動反饋結果[2]。而危化品車輛運輸視頻監控系統的環境更為復雜,背景多是動態場景,噪聲較多,運輸車輛的速度各不相同。這就需要一個穩定的運動目標檢測算法進行處理。
運動目標檢測的前景是準確分割出目標[3],目前主流的運動目標檢測方法有三類:光流法[4]、幀間差分法[5]和背景減除法[4-11]。背景減除法中常用的Vibe算法是一種高效的像素級視頻背景建模和前景減除算法,多用于危化品車輛運輸視頻監控系統的處理。但其存在以下不足:
(1)當第一幀圖像中有運動目標時,會檢測出來一個虛擬運動目標,那就是鬼影。盡管vibe算法可以通過在后續的幀來更新背景模型,以消除鬼影,但是這樣的方式消除鬼影耗時較長。如果在鬼影還沒有完全消除時,有運動目標出現在鬼影區域,那么會造成運動目標檢測的準確度下降。
(2)對光照強弱等動態場景比較敏感,當視頻場景中出現光照突然變弱或者變強、水面的閃爍,樹葉的搖動等現象,傳統的vibe算法會誤以為有運動目標出現,進而導致出現大面積的誤檢。
針對以上這些問題,本文通過研究傳統vibe算法,對傳統vibe算法進行了改進。(1)消除鬼影。由于vibe算法在通過視頻第一幀進行初始化背景模型時,如果第一幀當中包含前景目標,鬼影將會伴隨著模型的初始化而產生。因此想去掉鬼影,如何獲取真實的背景進行初始化背景建模是關鍵。首先通過三幀差分法得到差分圖像,根據直方圖當中有明顯的雙峰特性使用大津分割,二值化處理。此時獲得除運動目標外的部分背景圖片,為了獲得完整的背景圖片需要對部分背景圖片進行八領域填充和最近領域背景像素填充。最后將獲取到的真實的背景圖像,用來初始化背景模型。(2)消除光照變化、閃爍等誤檢。當vibe算法檢測的視頻場景中出現光照突然變弱或者變強、水面的閃爍、樹葉的搖動時,會出現大面積的誤檢。那是由于傳統的vibe算法其匹配閥值是固定的而引起的。vibe算法中的匹配閥值是區分前景像素和背景像素的關鍵,前景檢測的準確度跟匹配閥值的取值有直接關系。首先傳統的vibe算法因為使用的匹配閥值是固定不變的,因此適用于靜態視頻場景中。而在動態視頻場景中背景會隨著光線的變弱或者變強、水面的閃爍、樹葉的搖動變化,而此時如果還使用固定匹配閥值那么會讓vibe算法誤以為是運動目標從而導致大面積的誤檢。因此針對這種情況,本文提出自適應閥值,當動態背景變化較大時閥值設置較大,當動態背景變化較小時閥值設定也較小。
綜上所述,本文針對傳統vibe算法的不足,提出了改進方法。本文通過兩組視頻進行實驗,以驗證改進后vibe前景檢測算法的性能。
1 ViBe算法原理簡述
Vibe算法[12]的原理主要包含背景模型的初始化、運動檢測、背景模型的實時更新三個模塊。
1.1 背景模型初始化。
背景模型的建立就是為圖像中每個像素建立各自的樣本集,記當前圖像的一個像素點為x,樣本集為,如果通常每個像素的樣本集數是20,記n為20。背景模型建立好了之后,就需要對樣本集進行初始化,所謂的初始化就是通過選擇當前像素點的領域像素點的值來進行填充背景樣本集。
1.2 運動目標檢測。
由于vibe運動目標檢測算法是像素級別運動目標檢測,vibe運動目標檢測實際上就是像素分類的一個過程。如圖1 vibe算法分類模型。為中心,半徑的球體計算與的歐式距離,根據與交集的個數判斷當前像素屬于前景還是背景。
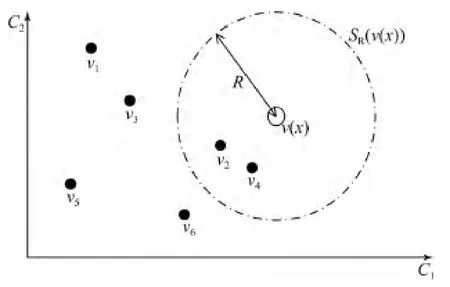
圖1 vibe算法分類模型
1.3 背景模型更新
采用保守的更新策略用來更新vibe算法的背景模型。保守的更新策略是指一旦某個像素被判定為前景像素,那么該像素點將一直不會填充到背景樣本集中,這也意味著該像素點永遠不會更新背景模型。當像素點被判定為背景像素時,那么隨機選擇背景樣本集中的一個值來進行更新,同時也更新該領域的背景樣本值。由于所有背景樣本是等概率的情況下隨機選擇更新,某個樣本值在特定的時間沒有被更新的概率[13]為
,并且經過一段時間后,仍然保留該樣本值的概率為公式(1):
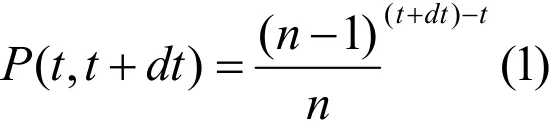
可以看出vibe前景檢測算法中的樣本更新與時間無關,采樣方式是無記憶,這種更新方式提高了vibe算法的動態適應能力。
2 提出算法的改進
盡管隨機取樣和無記憶的更新策略使得vibe算法性能比較優越,但是仍存在需要改進的地方。本文針對原算法中存在鬼影和動態場景敏感的問題做了改進,用來提高vibe前景檢測的準確度。
2.1 針對鬼影的改進
鬼影是由于vibe算法在通過視頻第一幀進行初始化背景模型時,如果當第一幀當中包含前景目標時,鬼影將會伴隨著背景模型的初始化而產生。因此在進行vibe算法之前先獲取真實的背景圖像是關鍵。本文通過三幀差分法背景建模獲取相對準確的背景圖像,利用準確的背景圖像填充背景樣本完成背景模型的初始化,最后通過前景檢測檢測出運動目標。
具體步驟為:
首先設定預處理幀數、幀處理步長,當前處理幀號,背景生成幀號,則第幀圖像為表示的是幀圖像,表示的是幀圖像。
從t幀開始,令。首先把視頻序列中連續的三幀圖像進行灰度化處理。然后進行差分運算。因為差分后的圖像的直方圖有明顯的雙峰特征表示背景像素和前景像素之間的方差比較大,因此使用大津分割。最后使用二值化處理。根據獲得的差分圖像就能知道除了前景位置之外的部分的真實背景信息。這個時候獲得的背景信息并不是完整的背景圖像,因此需要對不完整的背景圖形進行填充,繼續執行以下步驟完成背景圖像的填充,從而獲得相對真實的背景圖像。
如果沒有,轉到(3)。
如果有,將第i幀此位置的像素進行八領域填充為背景。
如果第t幀圖像運動目標位置的像素已經全部填充完畢轉(3)。
如果時,如果存在背景像素還沒有被填充,那么選擇背景像素中其領域像素值進行近似填充。如果已經全部填充了,輸出相對準確的背景圖像。
將獲取到的相對準確的背景圖像用來構建每個像素的背景模型,然后根據前景檢測獲取運動目標,最后進行二值化處理。為vibe前景檢測算法檢測到的二值圖,可表示為:

2.2 針對動態視頻場景敏感提出改進
傳統vibe算法的匹配閥值不適應動態背景下的前景檢測。因此本文采用自適應閥值來替代固定的匹配閥值。自適應閥值是如果背景變化較大,則自適應閥值將匹配閥值設置大一點,如果背景變化較小則將匹配閥值設置的小一點。


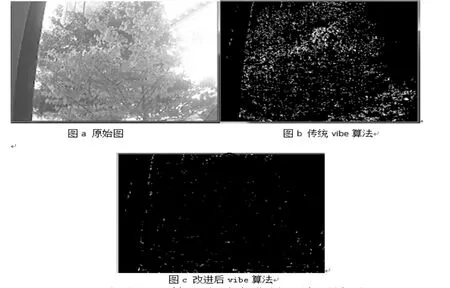
圖2 改進vibe算法在動態背景下檢測效果

2.3 改進后的vibe運動目標檢測
(1)首先通過三幀差分法背景建模獲取相對真實的背景圖像,之后將準確的背景圖像建立20背景樣本圖像,完成背景建模。
(3)前景檢測時,如果前景像素被判定為背景像素,那么更新該像素的背景。設定時間采用因子為16,以十六分之一概率更新背景像素的樣本集中的樣本值。
3 實驗結果分析
首先當測試的視頻第一幀圖像中含有運動目標,因此均存在鬼影。 從圖1中可以看出改進后的vibe算法沒有出現鬼影,相比較傳統vibe算法準確度更高。
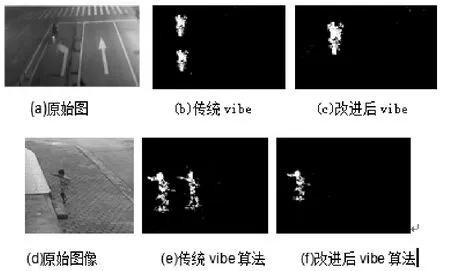
圖1 改進ViBe算法消除鬼影效果
其次測試的是背景會出現動態變化的視頻,如下圖2,圖(a)和圖(b)分別是視頻原圖像和傳統算法,在有風吹樹葉擾動的背景下傳統vibe算法會出現大量的誤檢測點。而圖(c)是改進vibe算法檢測效果,可以從圖像中看出大面積的誤檢點已經去除,檢測效果更加準確。
4 結論
本文對Vibe原算法進行了研究分析,針對其在危化品車輛運輸視頻監控系統中vibe算法運動目標檢測的不足,提出了一種改進算法。改進的vibe算法與傳統的vibe算法在鬼影、動態背景變化影響較大方面相比較,得到了很大的改善,提高了目標檢測的準確度。
[1]MAHMASSANI,HANI S,Data-driven intelligent transportation systems:a survey[J]. Intelligent-transportation Systems,2011.
[2]張仲瑜,焦淑紅.多特征融合的紅外艦船目標檢測方法[J].紅外與激光工程,2015.
[3]ZHANG B, PERINA A,LI Z, Bounding multiple Gaussian uncertainty with application to object tracking [J]. International Journal of Computer Vision,2016.
[4]Wixson I.Detecting Seilient Motion by Accumulating Directionally Consistent flow[J].IEEE Trans.Pattern Analysis and Machine Intelligence,2000.
[5]張磊,史金飛,羅翔.運動目標檢測的差分圖像分析研究[J].工業儀表與自動化裝置,2007.
[6]Barnich O,van Droogenbroeck M. ViBe : A powerful random technique to estimatc the background in video sequences[C]//Proc.Int.Conf.Acoust,Speech Signal Process,2009.
[7]Caseiro R,Henriques J,Martins P.Anonparametric riernannian framework on tensor field with application to foreground segmentation[c]//ICCV,2011.
[8]McIvor A.Background subtraction techniques [C]//Proc.Ima-geVis.Comput, Auckland. New Zealand , Nov,2000.
[9]Benezeth Y,Jodoin P,Emile B, Review and evaluation of commonly-imlemented background sub-strction algorithms[C] // Proc.IEEE,Int.Conf.Pattern Recognit,2008.
[10]Parks D,Fels S, Evaluation of background subtraction algo-rithms with post-processing [C]// Proc. IEEEIn t. Conf.Adv . VideoSignal Based Surveillance.Santa Fe, New Mexico, 2008.
[11]Joshi K A,Thakore DG.A Survey on Moving Object Detection and Tracking in Video Surveillance System[J]. Internationnal Journal of Soft Computing and Engineering, 2012.
[12]Barnich O,Van Droogenbroeck M, ViBe: A universal back-ground substraction algorithm for vido sequences[J].IEEE Transactions on Image Processing, 2011.
[13]Van Droogenbroeck M,Paquot O.Background subtraction:Experiments and improvements for ViBe[C].//Computer Vision and Pattern Recognition Workshops(CVPRW),2012 IEEE Computer Society Conference on. IEEE,2012.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發展導向(2021年6期)2021-06-09 05:57:08
現代國際關系(2021年2期)2021-04-13 01:59:16
當代陜西(2020年14期)2021-01-08 09:30:42
中國外匯(2019年11期)2019-08-27 02:06:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
太空探索(2016年10期)2016-07-10 12:07:01