一種點陣面板顯示缺陷檢測方法
2017-09-29 07:59:35黃靜文金晅宏
軟件導刊 2017年9期
黃靜文 金晅宏
摘 要:設計了一種圖像缺陷檢測算法,該算法將標準顯示圖像作為模板,將待測面板圖像與模板圖像進行比對,確定缺陷大小、位置。首先采用最小二乘法獲取屏幕邊界所在直線,用所得的4條直線作為角點,根據透視投影原理利用得到的4個角點進行圖像幾何校正,將校正后的模板和待測圖像配準,最后將校正后的圖像進行形態學處理,突出缺陷后將其與模板進行差模運算獲取缺陷。其中,模板圖像為標準顯示圖像經過與待測面板相同的校正、形態學處理后得到的圖像。經試驗檢測,這種方法適用于多種顯示模式,可以有效地檢測出面板的顯示缺陷。
關鍵詞:缺陷檢測;圖像校正;點陣面板;最小二乘法;VFD面板
DOI:10.11907/rjdk.171346
中圖分類號:TP317.4 文獻標識碼:A 文章編號:1672-7800(2017)009-0185-03
Abstract:An image defects detection algorithm is designed. The algorithm collected standarddisplay images as a template and then, compare the panel images with the template images to determine the defect size, location. At first, the least square method was used to detect straight lines in order to get the image boundary, then we used the four corners of the image to correct the image, ensure the basic alignment template and the image under test.At last ,we adjusted image morphology processing, highlighted the defect after comparing with the template for defects. The template image as a standard display images was processed as the panel under test after correcting and morphology processing. Experiments prove that this method is suitable for a variety of display mode and it can effectively detect the display detection.
Key Words:defects detection; image correction; lattice panel; the least square method; VFD panel
0 引言
VFD顯示屏即真空熒光顯示屏,具有發光亮度高、可靠性強、壽命長、視角大等優點[1],因其可用低壓進行驅動、易與集成電路配套等優點而被廣泛應用于汽車、辦公自動化設備、工業儀器儀表及家用電器等領域[2]。本文所研究的VFD點陣顯示屏的主要顯示缺陷為壞點缺陷,即存在顯示錯誤的暗點或亮點。由于壞點較小,人工檢測效率低下且存在主觀判斷,準確率低且沒有穩定的標準。采用圖像處理技術能有效提高檢測效率,適應工業自動化生產的發展需要。在機器視覺檢測中常采用兩種方式,一種是采用特征提取方式,根據待測圖像的圖像特征來進行檢測。這種方式對于不同顯示模式提取不同的特征值,檢測前要先確定好需要的特征,例如,可用直方圖特征、骨架特征等進行檢測[3-4]。另一種方式是采用模板匹配,將模板圖像與待測圖像進行圖像匹配,這種匹配方式通常是通過相關性等進行匹配,適用于較大的缺陷[5-6]。
本文提出一種檢測方式,經過圖像幾何校正,將待測圖像與模板圖像進行位置、形狀上的配準,隨后進行差影法處理,得到大致的缺陷圖像,最后經過形態學處理后得到缺陷圖像。此方法適用于多種顯示模式,同時也能達到較高的檢測精度,并通過實驗結果與分析,證明了其可行性。
1 VFD 顯示面板顯示模式及缺陷分析
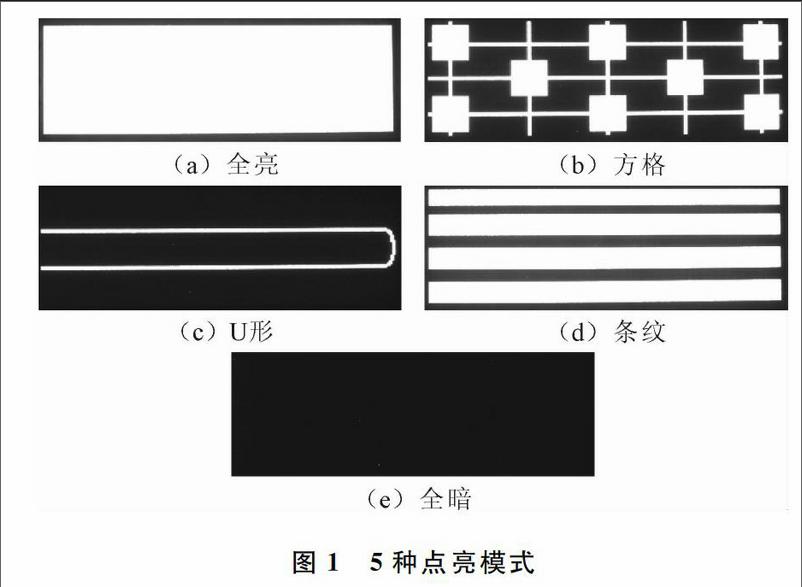
對 VFD 點陣面板進行點亮操作,5種點亮模式分別為全亮、方格、U形、條紋、全暗。圖1為全部5種點亮模式下標準面板顯示的圖像。本文所檢測的缺陷為點陣面板的顯示缺陷,其主要可以分為兩類:一類為亮點缺陷,即本不應點亮卻點亮的點;一類為暗點,即本應點亮卻未點亮的點。規定直徑大于0.5mm的壞點為缺陷點,實際試驗中,采集的圖像每個缺陷點直徑約為3個像素。
2 顯示缺陷檢測算法
2.1 圖像幾何校正與配準
缺陷檢測前,由于采集到的是灰度圖,首先對圖像采用最大類間方差法[7]進行二值化處理,隨后對獲得的二值化圖像進行分析。由于采集圖像時面板本身或相機不可避免地存在一定的傾斜,為方便檢測,所采集到的圖像需要進行校正。5種點亮模式中,全亮模式對于檢測感興趣區域與得到幾何校正的變換矩陣最為方便。得到全亮模式下變換矩陣后保持面板與攝像頭不再移動,將同一塊面板幾種點亮模式下采集到的圖像均乘以全亮模式下的變換矩陣即可配準全部點亮模式下的面板圖像。配準前首先通過選取最大連通域所在最小矩形的方式獲得一個感興趣區域,以此區域作為掩模,與二值化后的圖像進行點乘運算,通過該處理后所得到的圖像只包含所需檢測的面板區域圖像。為減少計算量,此處可對圖像進行一定的裁剪,本文中此處在最小外接矩形各邊緣向外多截取20個像素。
2.1.1 基于最小二乘法的直線邊緣提取endprint
本文中的校正算法需要獲取屏幕邊緣所在直線。為獲取屏幕4條邊所在直線,首先需要得到4條邊上點的位置信息。以獲取上邊緣線為例,按從左向右、從上到下順序讀取圖像每個點的值, 記錄每一列掃描到的第一個亮點的坐標值,得到的一組數據為面板上邊緣點的坐標。由于面板本身存在小角度傾斜,所得到的點并不僅僅是上邊緣點,還存在其它邊緣點,為降低這些點在直線擬合時的影響,處理數據時僅采用這組數中的中段,選取的數據長度與傾斜角有關。同時為避免部分缺陷點影響,對提取的這部分數據再進行一次中值濾波。由于每個面板上的點在采集到的圖像中約占3個像素,濾波窗口大小取5。中值濾波后的4組數據分別用最小二乘法進行直線擬合,得到4條直線。
最小二乘化是一種常見的直線擬合方式,其基本原理是通過最小化誤差的平方和找到一組數據的最佳函數匹配,從誤差擬合角度對回歸模型進行參數估計或系統辨識,在參數估計、系統辨識以及預測、預報等眾多領域中得到極為廣泛的應用[8]。假設一組點所在直線為AX+B=0,根據最小二乘法求出:A=1C∑nk=1(Xk-X)(Yk-Y)
(1)
B=Y-AX
(2) 其中,C=∑nk=1(Xk-X)2,由此可以得出該直線。
2.1.2 基于透視投影的幾何校正
透視投影屬于中心投影,透視投影圖簡稱為透視圖或透視,它是從某個投射中心將物體投射到單一投影面上所得到的圖形。拍攝圖像時,由于攝像機的拍攝視角會導致一定的畸變,本文所檢測圖像中存在的主要畸變即為透視投影所帶來的畸變。二維圖像通過透視變換的過程可以表示為式(3)、式(4),其中,(x,y)為原始圖像上某一點的坐標,(u,v)為該點透視變換后的坐標,a、b、c、d、e、f、l、m、n為變換矩陣的參數[9]。u=ax+by+clx+my+1,v=dx+ey+flx+my+1
(3) 式(3)可表示成矩陣:A=HB
(4) 式中,A為變換后點的坐標,B為圖像原坐標,H為變換矩陣。透視變換對畸變圖像的校正需要得到畸變圖像的一組4個點的坐標,和與之相對應的目標圖像的4個點的坐標,通過代入這兩組共8個坐標可以計算出透視變換的變換矩陣H,之后對整個原始圖像執行變換矩陣的變換,就可以實現圖像校正。上一步驟中,4組數據直線擬合后取得了4條直線方程,兩兩聯立可得到4個交點坐標,將其作為屏幕角點。由已知屏幕的實際長寬,得到實際4個角點目標位置,4個交點與4個目標位置一一對應,可以求出變換矩陣[10]。文獻[9]中給出了一種具體的計算方式,本文直接采用Matlab函數庫中的maketform函數代入8個點坐標進行此處的運算得到變換矩陣。最后將原始圖像乘以得到的變換矩陣即可得到校正后圖像。
2.1.3 配準
校正后所得圖像中,待檢測部分即顯示屏所在位置與模板所在位置不一定相同,在校正后需要進行配準才能進行下一步操作。具體配準步驟如下:①檢測校正后得到的二值圖像,獲取最小外接矩形;②對圖像進行裁剪,截取該最小外接矩形部分,為方便觀察,在各邊緣向外多截取了3個像素的圖像;③對其進行縮放,統一圖像大小。
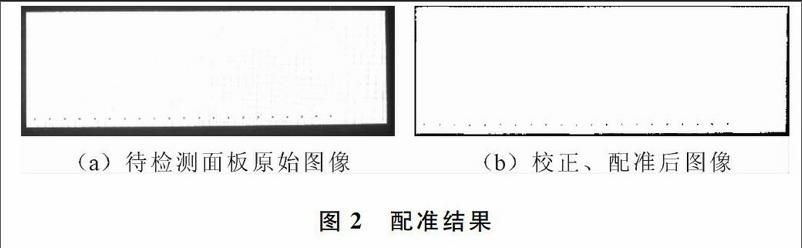
圖2為一塊含有暗點缺陷面板全亮顯示模式下校正、配準后圖像,圖2(a)為待檢測面板原始圖像,圖2(b)為配準后圖像。
2.2 缺陷檢測顯示
理想情況下,壞點大小至少為3*3像素,但采集圖像時因為外界因素干擾,壞點可能并不明顯,需要進行相應的形態學處理[11]。此處形態學處理根據所檢測壞點不同分為兩種:檢測亮點時,此處進行膨脹處理;檢測暗點時,此處進行腐蝕運算。選取一幅正常圖像作為模板,校正后也進行相同的形態學處理,隨后對應的圖像進行差模運算。校正后得到的圖像由于二值化、圖像校正及拍攝本身的影響不會與模板完全相同,但誤差相對較小,再次進行開運算可排除誤差帶來的影響。開運算還能將圖像中存在的一些較小的噪聲點濾除,尺寸過小的噪聲點不會被誤判作缺陷點,只有最大直徑大于或等于3個像素的點才能被判定為缺陷點。本文采用disk形直徑為5的結構元素進行膨脹處理,處理結果如圖3所示,可以看出,左上角處的亮點缺陷可以被檢測出。這種配準方式雖然不能達到與模板的完全匹配,但并不影響檢測出缺陷點。
對于暗點,檢測過程與亮點檢測過程基本相似,只是在形態學處理時選擇腐蝕運算而非膨脹運算。檢測時,首先將待測圖像進行校正與ROI提取,隨后進行腐蝕運算,增強缺陷,最后將經過其與模板圖像進行異或得到的結果再進行開運算,得到最終暗點圖像。其中,模板為標準面板經過校正、ROI提取、開運算后得到的圖像。缺陷圖像與模板進行異或操作后腐蝕得到的圖像上只含有缺陷點,由此可以通過計算結果圖中連通域的大小、數目、位置等獲取缺陷點數目、位置信息,并以此判斷面板的合格與否。
帶暗點缺陷的面板圖像處理結果如圖4所示。
將整體檢測算法進行總結如下:①將全亮模式下采集到的待檢測圖像進行4個方向的投影、濾波,選取每組數中段部分的點進行最小二乘化擬合,求出4條邊緣所在直線;②求所得4條直線的4個交點,將其作為角點得到變換矩陣,進行幾何校正,并保存此處變換矩陣;③改變點亮模式時面板相機均不移動,可將同一塊面板幾種點亮模式下采集到的圖像均乘以全亮模式下的變換矩陣,獲得校正后圖像,配準后進行形態學處理和缺陷檢測。
實驗結果表明,利用這種算法可以迅速有效地進行點陣面板的缺陷檢測,只需在固定顯示器和攝像頭前提下拍攝不同模式下的圖片,并利用不同顯示模式下的模板,即可用一種算法解決多種顯示模式下的缺陷檢測。
3 結語
針對VFD點陣面板,本文通過最小二乘法獲取顯示屏邊緣所在直線進而獲得角點,基于透視投影的幾何校正對圖像進行配準;隨后,將配準好的圖像與模板圖像進行差模運算,并通過形態學處理去掉其中誤差因素影響獲取壞點圖,能快速準確地進行較小型壞點的識別與定位。該方法檢測精度可達3個像素,解決了人工檢測效率低、漏檢率高的問題,滿足點陣面板顯示缺陷檢測的基本要求。
參考文獻:
[1] 張建平,趙威,戴詠夏.真空熒光顯示器亮度特性的研究[J].液晶與顯示,2010,25(1):40-48.
[2] 阮世平.高性能真空熒光顯示器(VFD)開發和應用[J].光電子技術,2005,25(4):211-217.
[3] 吳軍.車載DVD控制電路板VFD顯示屏缺陷檢測技術的研究[D].南京:南京理工大學,2007.
[4] 王業翔,戴曙光.基于LabVIEW的VFD視覺檢測技術研究[J].電子科技,2015,28(8):157-163.
[5] 劉延允.面向OLED顯示屏的缺陷檢測算法研究與系統開發[D].廣州:廣東工業大學,2011.
[6] 徐煒東,郭斌,張永超,等.液晶屏字符顯示缺陷檢測算法研究[J].中國計量學院學報,2014,25(2):139-143.
[7] 王耀南.計算機圖像處理與識別技術[M].北京:高等教育出版社,2001.
[8] 鄒樂強.最小二乘法原理及其簡單應用[J].科技信息,2010,2(23):282-283.
[9] 代勤,王延杰,韓廣良,等.基于改進Hough變換和透視變換的透視圖像矯正[J].液晶與顯示,2012,27(4):552-556.
[10] 吳柏雄.基于矩形角點幾何變換的畸變圖像校正[J].計算機與數字工程,2009,37(11):152-154.
[11] 何東建.數字圖像處理[M].第1版.西安:西安電子科技大學出版社,2003.
(責任編輯:孫 娟)endprint
