基于永磁無刷電機(jī)磁場定向控制的平臺伺服控制設(shè)計
2017-10-11 13:11:57唐百勝蔣鴻翔王媛媛
導(dǎo)航與控制 2017年5期
唐百勝,蔣鴻翔,朱 娜,王媛媛
(1.海軍駐北京地區(qū)導(dǎo)彈配套設(shè)備軍事代表室,北京100854;2.北京航天控制儀器研究所,北京100039)
基于永磁無刷電機(jī)磁場定向控制的平臺伺服控制設(shè)計
唐百勝1,蔣鴻翔2,朱 娜2,王媛媛2
(1.海軍駐北京地區(qū)導(dǎo)彈配套設(shè)備軍事代表室,北京100854;2.北京航天控制儀器研究所,北京100039)
介紹了基于永磁無刷電機(jī)(Brushless DC Motor,BLDC)和磁場定向控制(FOC)的平臺伺服控制系統(tǒng)方案。闡述了一種基于FOC的伺服控制設(shè)計方法,描述了嵌入式系統(tǒng)的硬件與軟件實現(xiàn)。通過實測對比了BLDC采用FOC方法與三相六拍法時伺服控制系統(tǒng)的轉(zhuǎn)速波動情況,結(jié)果顯示采用FOC顯著提高了基于BLDC的伺服控制系統(tǒng)性能。
平臺伺服系統(tǒng);永磁無刷電機(jī);磁場定向控制;伺服控制設(shè)計
Abstract:A platform servo control system schema based on permanent magnet brushless DC motor(BLDC)and filed orientation control(FOC)is introduced.The FOC?based platform servo control system design methods,including its embed?ded hardware and software implementation,are described.The rotation rate fluctuating of the servo control system using FOC and three?phase six?step control are compared in the actual servo control experiments.It is demonstrated by the experi?ment results that performance of the servo control system based on BLDC and FOC are greatly improved.
Key words:platform servo control system;permanent brushless DC motor;filed orientation control;servo control sys?tem design
0 引言
在陀螺穩(wěn)定平臺、光電偵察吊艙、轉(zhuǎn)臺等平臺類伺服控制系統(tǒng)中,驅(qū)動元件及驅(qū)動電路的作用是將控制回路的輸出通過脈寬調(diào)制技術(shù)(PWM)和功率放大變?yōu)檗D(zhuǎn)矩[1?3]。有刷力矩電機(jī)通過機(jī)械換向器使轉(zhuǎn)子在轉(zhuǎn)動時始終產(chǎn)生電磁轉(zhuǎn)矩。BLDC依賴電子換相,驅(qū)動電路監(jiān)控轉(zhuǎn)子位置并在繞組中產(chǎn)生合適的激勵,以產(chǎn)生電磁轉(zhuǎn)矩。
為簡化BLDC控制,通常采用三相六拍驅(qū)動方法。任何時候BLDC只有兩相導(dǎo)通而第三相截止,優(yōu)點是驅(qū)動方式與有刷力矩電機(jī)一樣簡單,但缺點是相與相之間切換時會產(chǎn)生很大的轉(zhuǎn)矩波動。有刷電機(jī)有許多相,因此相與相切換時產(chǎn)生的轉(zhuǎn)矩波動較小。在要求較高精度的平臺伺服控制系統(tǒng)中,采用三相六拍法驅(qū)動BLDC無法滿足系統(tǒng)精度要求。
隨著BLDC驅(qū)動技術(shù)的進(jìn)步和可實現(xiàn)先進(jìn)驅(qū)動算法的高速DSP處理器的出現(xiàn),BLDC驅(qū)動方法也從三相六拍法向著磁場定向控制(FOC)等先進(jìn)驅(qū)動方法發(fā)展,而應(yīng)用了FOC的BLDC也在工業(yè)控制、機(jī)器人、電動汽車等領(lǐng)域得到了廣泛應(yīng)用。
本文首先介紹平臺伺服控制系統(tǒng)和BLDC FOC方案,然后闡述基于FOC的平臺伺服控制設(shè)計與實現(xiàn),最后通過樣機(jī)實測結(jié)果驗證基于BLDC和FOC的平臺伺服控制設(shè)計的可行性。
1 系統(tǒng)組成與FOC原理
平臺伺服系統(tǒng)為框架位置跟隨伺服系統(tǒng),由相機(jī)負(fù)載、BLDC、雙通道旋轉(zhuǎn)變壓器和控制驅(qū)動電路組成[1]。該系統(tǒng)接收框架轉(zhuǎn)動指令以后,按預(yù)定的梯形速度變化方式進(jìn)行框架的平穩(wěn)轉(zhuǎn)動,并最終鎖定在目標(biāo)位置上。系統(tǒng)采用典型的位置環(huán)與速度環(huán)的雙環(huán)控制結(jié)構(gòu),控制器和FOC均在DSP芯片中實現(xiàn),速度環(huán)的輸出作為FOC的輸入,F(xiàn)OC輸出三相脈寬調(diào)制信號,經(jīng)驅(qū)動芯片功率放大后驅(qū)動電機(jī)。系統(tǒng)框圖如圖1所示。
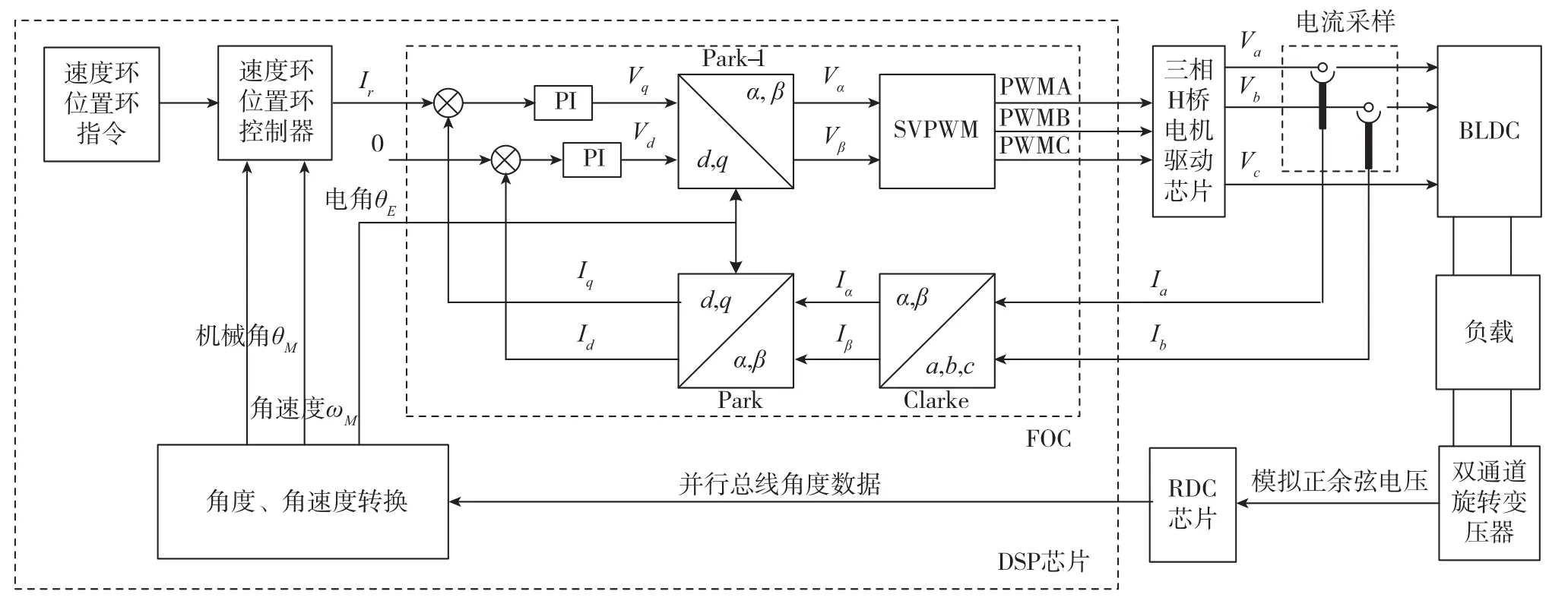
圖1 平臺伺服系統(tǒng)框圖Fig.1 Block diagram of the platform servo system
為實現(xiàn)FOC,首先需定義兩個不旋轉(zhuǎn)的靜止坐標(biāo)系和一個以轉(zhuǎn)子速度旋轉(zhuǎn)的旋轉(zhuǎn)坐標(biāo)系。兩個靜止坐標(biāo)系分別為與三相繞組對應(yīng)的a?b?c非正交坐標(biāo)系和虛擬的α?β正交坐標(biāo)系,α軸和a軸重合。轉(zhuǎn)子坐標(biāo)系為d?q坐標(biāo)系,θE為d軸相對于α軸的轉(zhuǎn)角,其微分為轉(zhuǎn)子電角速度,與轉(zhuǎn)子機(jī)械角速度的關(guān)系,P為電機(jī)磁極對數(shù)。
圖2為d?q坐標(biāo)系下電流所產(chǎn)生的磁通矢量以及轉(zhuǎn)子永磁體所產(chǎn)生的磁通矢量。根據(jù)BLDC控制理論[4?5],轉(zhuǎn)子永磁體所產(chǎn)生的磁通ΦF與電流矢量d軸投影Id所產(chǎn)生定子繞組磁通Φd合成為勵磁磁通,而電流矢量q軸投影Iq所產(chǎn)生的磁通ΦT與轉(zhuǎn)矩有關(guān)。與高速BLDC的FOC需通過增大Φd削弱ΦF以抑制反電勢不同,平臺伺服系統(tǒng)對FOC的要求是實現(xiàn)低轉(zhuǎn)速大力矩,因此通過控制d?q坐標(biāo)系的電流,使繞組磁通Φd為零并且保持轉(zhuǎn)矩磁通ΦT不變,理論上可產(chǎn)生恒定的電磁轉(zhuǎn)矩,此時d?q坐標(biāo)系所固連的電機(jī)轉(zhuǎn)子將相對于α?β坐標(biāo)系所固連的電機(jī)定子持續(xù)旋轉(zhuǎn)。
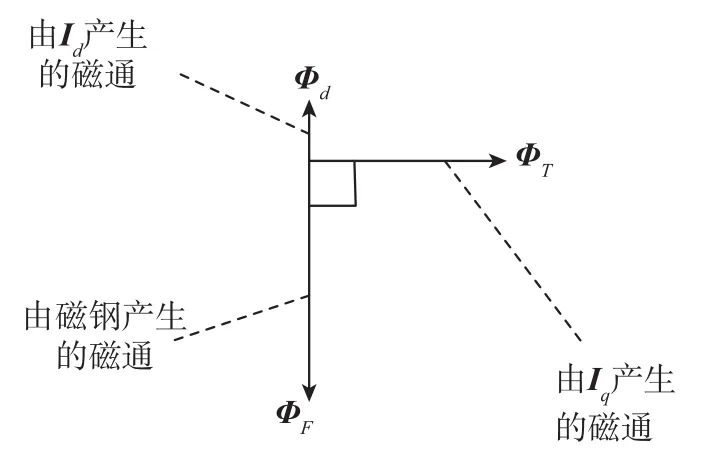
圖2 d?q坐標(biāo)系電流磁通向量圖Fig.2 Vector schematics of current and magnetic flux ind?qcoordinate
在d?q旋轉(zhuǎn)坐標(biāo)系下控制電流的優(yōu)勢在于,盡管此時a、b、c三相電流在不斷波動,但合成的電流、磁勢、磁通等矢量在旋轉(zhuǎn)坐標(biāo)系下卻是靜止不動的。BLDC在高速、低速、零速狀態(tài)下電流控制方式幾乎完全一樣,電流控制與電機(jī)轉(zhuǎn)速解耦使得電流控制器的設(shè)計難度大大降低。
依據(jù)磁動勢等效原理,a、b、c繞組電流通過Clarke變換轉(zhuǎn)變?yōu)棣?β坐標(biāo)系下電流,其形式為[6?7]:
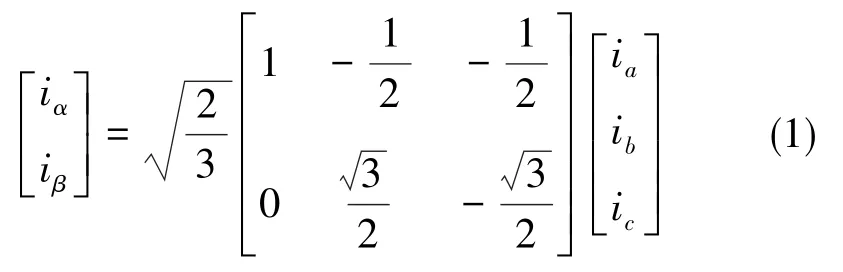
再將α?β坐標(biāo)系下電流通過Park變換轉(zhuǎn)變到d?q旋轉(zhuǎn)坐標(biāo)系下,其形式為:

兩個PI電流控制器將使轉(zhuǎn)矩電流Iq跟隨速度環(huán)輸出的電流控制指令而產(chǎn)生轉(zhuǎn)矩,使磁通電流Id保持為0,實現(xiàn)Φd為0。將d?q坐標(biāo)系下的電流控制器輸出Vq和Vd經(jīng)Park逆變換后表示在α?β坐標(biāo)系下,相當(dāng)于旋轉(zhuǎn)坐標(biāo)系電流控制器的輸出電壓在靜止坐標(biāo)系中形成一個旋轉(zhuǎn)的電壓矢量V,其形式為:

三相全橋驅(qū)動電路有8種開關(guān)狀態(tài),產(chǎn)生6個不為0的電壓基矢量和兩個0電壓基矢量。電壓基矢量將空間劃分為6個扇區(qū),每個扇區(qū)覆蓋60°電角度,其分布如圖3所示。例如,V1(100)對應(yīng)于a相上半橋?qū)ǎ琤相和c相下半橋?qū)ǖ拈_關(guān)狀態(tài),V2(110)對應(yīng)于a相和b相上半橋?qū)ǎ琧相下半橋?qū)ǖ拈_關(guān)狀態(tài),而0矢量V0(000)和V7(111)分別對應(yīng)于上半橋全截止和下半橋全截止的開關(guān)狀態(tài)。
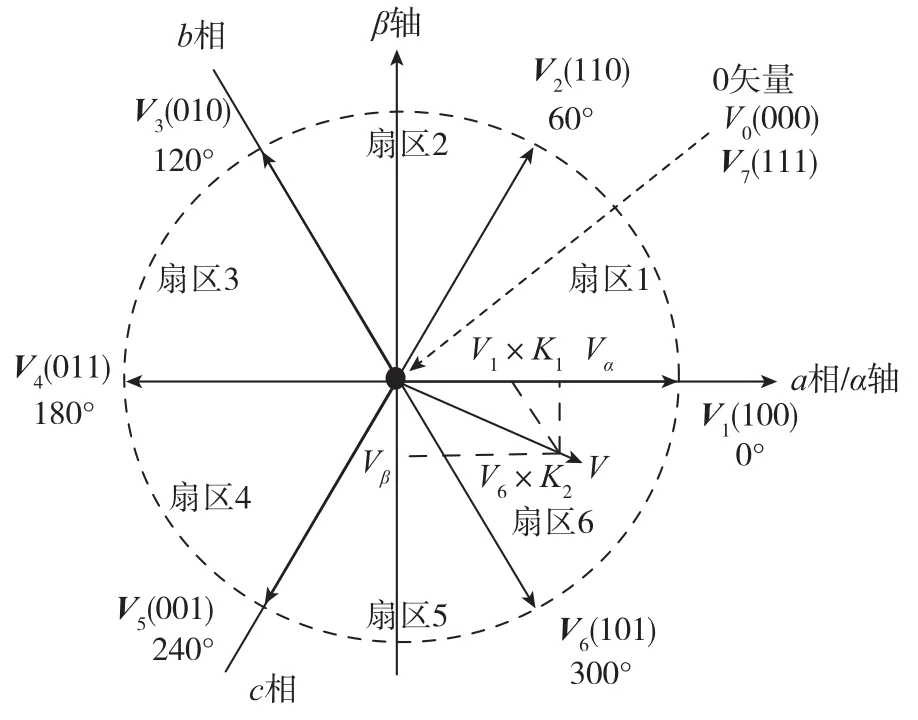
圖3 三相驅(qū)動電路輸出電壓基矢量圖Fig.3 Basic vector schematics of 3?phase drivers voltage output
FOC利用兩個相鄰電壓基矢量以及作用時間的線性組合,在任意時刻產(chǎn)生任意方向和大小的電壓矢量[8?9]。例如,假設(shè)d?q電流控制所產(chǎn)生的電壓矢量為V,轉(zhuǎn)換到α?β坐標(biāo)系后由其分量Vα和Vβ知,V應(yīng)處于第6扇區(qū),則V應(yīng)等效于V6和V1電壓矢量的線性組合:

其中,各矢量在α?β坐標(biāo)系下的形式均為已知量:

從而可計算出K1和K2,而式(4)的線性組合等效于在一個PWM周期T時間里V1和V6電壓矢量分別作用的時間:

其中,K0T是0矢量的持續(xù)時間,K1T是V1矢量的持續(xù)時間,K2T是V6矢量的持續(xù)時間。在每一個PWM周期內(nèi),根據(jù)K0、K1和K2產(chǎn)生的PWM驅(qū)動信號使三相驅(qū)動電路產(chǎn)生電壓矢量V,相比上一個PWM周期所產(chǎn)生的電壓矢量僅有很小的變化,因此采用FOC的BLDC具有比三相六拍法和有刷電機(jī)更小的力矩波動。
2 伺服控制設(shè)計與FOC實現(xiàn)
2.1 硬件設(shè)計
伺服控制系統(tǒng)運行在TMS320F2812型DSP芯片上。16對極雙通道旋轉(zhuǎn)變壓器作為測角元件與BLDC同軸安裝,其粗、精機(jī)械角度數(shù)字量經(jīng)兩片軸角轉(zhuǎn)換芯片AD2S80A采集得到,與DSP芯片之間為16位并行總線通信,粗精組合后角度數(shù)字量為20位。DSP芯片輸出三路載波頻率為10kHz的PWM信號給驅(qū)動芯片L298以產(chǎn)生三相繞組驅(qū)動電流,同時a相和b相電流經(jīng)兩只LA25?NP霍爾電流互感器產(chǎn)生兩路模擬電壓信號,再通過2階有源低通濾波網(wǎng)絡(luò)接到DSP芯片的ADC端口實現(xiàn)電流采集。
2.2 軟件設(shè)計
伺服控制系統(tǒng)的DSP軟件按執(zhí)行順序分為啟動部分和中斷響應(yīng)部分。啟動部分在上電后執(zhí)行,主要是DSP系統(tǒng)設(shè)置、與永磁無刷電機(jī)驅(qū)動以及伺服控制有關(guān)的ADC模塊、事件管理器、定時器、中斷響應(yīng)函數(shù)等設(shè)置;中斷主要包括ADC轉(zhuǎn)換完成中斷、定時器中斷。
當(dāng)DSP上電完成啟動各項寄存器和外設(shè)配置后,主函數(shù)順序進(jìn)入到等待循環(huán)中,當(dāng)以下硬件中斷產(chǎn)生時,中斷響應(yīng)函數(shù)執(zhí)行情況如下:
1)定時中斷每2ms觸發(fā)一次,在此中斷函數(shù)中DSP通過并行總線獲取機(jī)械角數(shù)字量,根據(jù)極對數(shù)計算出d?q坐標(biāo)系相對α?β坐標(biāo)系的旋轉(zhuǎn)角,用于Park變換和逆Park變換計算。進(jìn)行差分計算以得到機(jī)械角速度。在定時中斷中進(jìn)行位置環(huán)與速度環(huán)的控制器運算,運算結(jié)果作為Iq電流控制器的指令輸入量Ir,而Id電流控制器的指令輸入量始終為0。
2)ADC采集被設(shè)置為當(dāng)事件管理器中的增/減計數(shù)器值到0,即達(dá)到一個PWM周期(100μs)時觸發(fā)電流采集和中斷,從而實現(xiàn)電流采集與電流控制同步。中斷函數(shù)中獲取電流值以后,將按圖4所示流程和式(1)~式(6)進(jìn)行FOC計算。
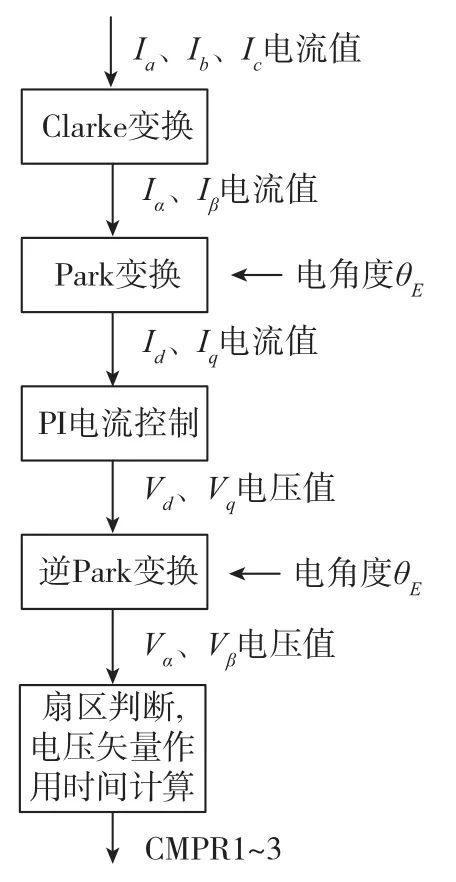
圖4 中斷函數(shù)中FOC計算流程Fig.4 Calculation flowchart of FOC in the interrupt function
當(dāng)電壓矢量V在第6扇區(qū)時,一個PWM周期內(nèi)對稱三相PWM信號如圖5所示。由圖5可知,在K0T作用時間里,三相驅(qū)動電路產(chǎn)生零矢量;在K1T作用時間里,三相驅(qū)動電路產(chǎn)生V1矢量;在K2T作用時間里,三相驅(qū)動電路產(chǎn)生V6矢量,因此PWM波形在一個周期內(nèi)產(chǎn)生了電壓矢量V。DSP采用對稱PWM波形主要為了便于在一個PWM周期的開頭、半周期和結(jié)束時插入零矢量,以減小三相驅(qū)動電路的開關(guān)切換次數(shù)和切換損耗。
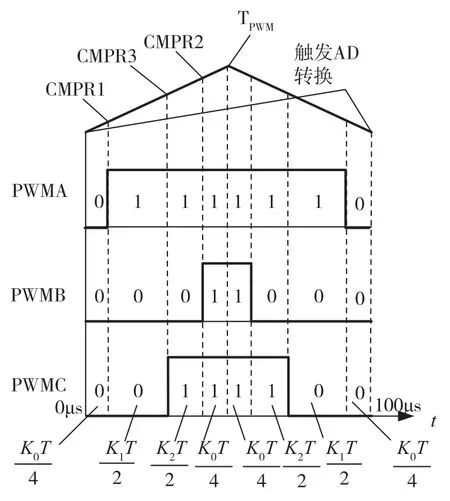
圖5 第6扇區(qū)內(nèi)典型三相PWM信號波形Fig.5 Typical waveform graph of 3?phase PWM signal in 6thsector
2.3 FOC實測性能
進(jìn)行了基于BLDC和FOC的控制性能實測,并與采用三相六拍法的伺服控制性能進(jìn)行了對比。通過上位機(jī)及串行通信接口向平臺伺服控制系統(tǒng)發(fā)出轉(zhuǎn)位指令,要求框架必須在1s加速到20(°)/s,再以此速度穩(wěn)定旋轉(zhuǎn)3.5s,最后經(jīng)1s減速到停止,當(dāng)框架停止轉(zhuǎn)動時恰好完成90°轉(zhuǎn)位。角速度對比結(jié)果如圖6所示,結(jié)果顯示采用FOC后顯著降低框架轉(zhuǎn)動時的角速度波動,其波動量由±5(°)/s降低至±1(°)/s,伺服控制精度大大提高。
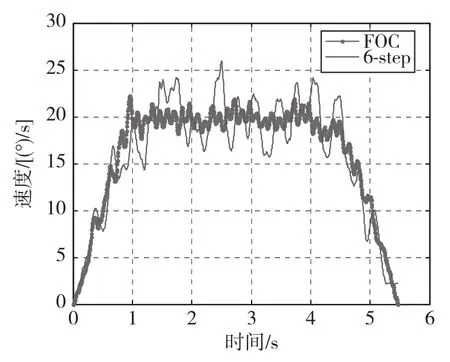
圖6 框架旋轉(zhuǎn)角速度波形圖Fig.6 Waveform graph of rate in the gimbal rotation
在轉(zhuǎn)位過程中采集的a相電流和b相電流,以及d?q坐標(biāo)系計算得到的轉(zhuǎn)矩電流Iq波形如圖7所示。結(jié)果顯示FOC使無刷電機(jī)三相繞組上的正弦電流受控,正弦電流周期約2.25s,可得電角速度約為160(°)/s,對應(yīng)于 20(°)/s 的機(jī)械轉(zhuǎn)速。旋轉(zhuǎn)坐標(biāo)系下的轉(zhuǎn)矩電流響應(yīng)迅速,保證框架伺服控制系統(tǒng)快速輸出力矩,以克服框架轉(zhuǎn)動時導(dǎo)線扭轉(zhuǎn)造成的快速變化干擾力矩,實現(xiàn)轉(zhuǎn)速控制波動在±1(°)/s內(nèi)。
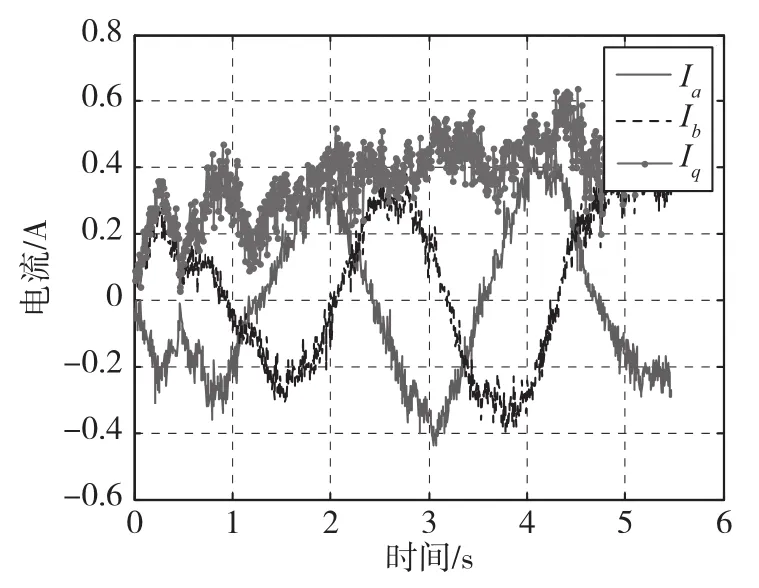
圖7 框架旋轉(zhuǎn)電流波形圖Fig.7 Waveform graph of current in the gimbal rotation
3 結(jié)論
在穩(wěn)定平臺框架伺服系統(tǒng)的研發(fā)中實現(xiàn)了BLDC的FOC驅(qū)動,實測結(jié)果顯示FOC的電流控制平穩(wěn),電流響應(yīng)迅速,改善了力矩波動和電流環(huán)控制的相位滯后,對提升速度穩(wěn)定回路的性能有很大幫助。與有刷電機(jī)相比,BLDC在惡劣環(huán)境、長期使用貯存條件下具有優(yōu)勢。綜上可知,在設(shè)計高精度、長壽命的陀螺穩(wěn)定平臺和光電偵察吊艙等伺服控制系統(tǒng)時,應(yīng)優(yōu)先考慮基于BLDC和FOC的電機(jī)驅(qū)動方案。
[1]丁楠,丁偉,蔣鴻翔.基于FPGA和DSP的光電吊艙控制系統(tǒng)設(shè)計與實現(xiàn)[J].導(dǎo)航與控制,2013,12(4):21?24+5.DING Nan,DING Wei,JIANG Hong?xiang.Design and realization of control system on electro?optical pod based on DSP and FPGA[J].Navigation and Control,2013,12(4):21?24+5.
[2]畢永利.多框架光電平臺控制系統(tǒng)研究[D].長春光學(xué)精密機(jī)械與物理研究所,2003.BI Yong?li.Study on control system of multi?frame photoe?lectric platform[D].Changchun Institute of Optics,Fine Mechanics and Physics,2003.
[3]吳海濤,范大鵬.光電伺服機(jī)構(gòu)電機(jī)選型問題研究[J].應(yīng)用光學(xué),2015,36(6):829?835.WU Hai?tao,FAN Da?peng.Motor selection of opto?elec?tronic servo system[J].Journal of Applied Optics,2015,36(6):829?835.
[4]柴鳳.永磁無刷電機(jī)及其驅(qū)動技術(shù)[M].北京:機(jī)械工業(yè)出版社,2015.CHAI Feng.Permanent magnet synchronous and brushless DC motor drivers[M].Beijing:China Machine Press,2015.
[5]湯曉君.控制系統(tǒng)設(shè)計指南[M].北京:機(jī)械工業(yè)出版社,2015.TANG Xiao?jun.Control system design guide[M].Beijing:China Machine Press,2015.
[6]蘇翀,韓兵.基于三相旋轉(zhuǎn)變換與極坐標(biāo)變換的電機(jī)矢量控制[J].微型電腦應(yīng)用,2012,28(7):11?13.SU Chong,HAN Bing.The motor vector control based on 3 phase rotation and polar coordination transformation[J].Microcomputer Applications,2012,28(7):11?13.
[7]謝小剛,陳進(jìn).采用id=0的永磁同步電機(jī)矢量控制系統(tǒng)Matlab/Simulink仿真[J].新型工業(yè)化,2016,6(5):47?54.XIE Xiao?gang,CHEN Jin.Vector control withid=0 simu?lation of PMSM based on Matlab/Simulink[J].The Journal of New Industrialization,2016,6(5):47?54.
[8]孔維濤,張慶范,張承慧.基于DSP的空間矢量脈寬調(diào)制(SVPWM)的實現(xiàn)[J].山東大學(xué)學(xué)報,2008,38(3):81?85.KONGWei?tao,ZHANG Qing?fan,ZHANG Cheng?hui.DSP based implementation of the space vector pulse width modulation[J].Journal of Shandong University,2008,38(3):81?85.
[9]吳鳳江,高晗瓔,孫力,等.基于DSP的SVPWM快速算法研究[J].電氣傳動,2006,36(9):44?46.WU Feng?jiang,GAO Han?ying,SUN Li,et al.Research on fast algorithm of SVPWM based on DSP[J].Electric Drive,2006,36(9):44?46.
Platform Servo Control Design Based on Permanent Magnet Brushless DC Motor and Filed Orientation Control
TANG Bai?sheng1,JIANG Hong?xiang2,ZHU Na2,WANG Yuan?yuan2
(1.The Navy Military Representative Office of Missile Equipment in Beijing,Beijing 100854;2.Beijing Institute of Aerospace Control Devices,Beijing 100039)
U666.1
A
1674?5558(2017)03?01339
10.3969/j.issn.1674?5558.2017.05.013
2016?11?25
唐百勝,男,碩士,工程師,研究方向為導(dǎo)航、制導(dǎo)與控制。