利用基于模型的層析速度反演進行低幅度構造成像
2017-10-23 22:37:28管文勝段文勝宋小平
石油地球物理勘探 2017年1期
管文勝 段文勝 查 明 孫 琦 宋小平 蘇 洲
(①中國石油大學(華東)地球科學與技術學院,山東青島266580;②中國石油塔里木油田公司勘探開發研究院,新疆庫爾勒841000;③帕拉代姆技術(北京)有限公司,北京100083)
利用基于模型的層析速度反演進行低幅度構造成像
管文勝*①②段文勝②查 明①孫 琦②宋小平③蘇 洲②
(①中國石油大學(華東)地球科學與技術學院,山東青島266580;②中國石油塔里木油田公司勘探開發研究院,新疆庫爾勒841000;③帕拉代姆技術(北京)有限公司,北京100083)
基于層位的層析反演在低信噪比地區無法進行層位解釋,在劃分速度界面時也無法保證模型精度,局限性較大;基于網格的層析反演不容易收斂到實際速度模型,且模型沒有地質意義的約束,有時會產生不符合地質規律的反演結果。為此,基于模型的層析反演方法,借鑒了層位約束和全局反演優點,以地質層位為基礎建立模型,在橫向上沿地質層位網格進行參數更新,在縱向上層位間網格更新尺度隨著模型的地質層位而變化,既解決了薄層速度建模問題,又能得到精準的高、低頻速度分量和各向異性參數。其次,基于模型的層析反演將模型中地質層位的深度作為一個變量納入層析反演數據空間,可以同時反演速度結構與反射點位置(或反射層深度),具有更高的反演精度。將基于模型的層析反演方法應用于YM工區實際資料,并通過各向異性疊前深度偏移處理,提高了速度模型精度,解決了該區低幅度構造成像問題。
低幅度構造 基于模型的層析反演 層析成像矩陣 VTI介質 疊前深度偏移
1 引言
基于射線追蹤的層析反演技術是目前疊前深度偏移最常用的速度模型建立方法,主要利用偏移和層析交替迭代的方法進行速度反演,能夠恢復速度場中的高、低波數信息,被廣泛用于深度域速度模型的建立[1-5]。在工業界又細分為兩種具體方法:①基于層位的層析反演,主要通過在簡單層狀模型的多個速度界面求取射線路徑和剩余延遲時進行速度反演[6]。其優點是能夠表達復雜的地質模型,模型受地質構造的約束,具有地質意義;缺點是需要輸入構造解釋模型,在低信噪比地區無法進行層位解釋,在劃分速度界面時也無法保證模型精度,而且這種簡單模型簡化了速度模型的細節,局限性較大;②基于網格的層析反演,通過在全局求取射線路徑和剩余延遲時進行速度反演,無需輸入解釋模型,克服了層狀模型在層間速度細節刻畫上的缺陷,反演精度較高,可以獲得較為準確的速度場高頻分量;但不容易收斂到實際速度模型[7-9],且模型沒有地質意義的約束,有時會產生不符合地質規律的反演結果。
基于模型的層析反演方法,借鑒了層位約束和全局反演優點,以地質層位為基礎建立模型,在橫向上沿地質層位網格進行參數更新,在縱向上層位間網格更新尺度隨著模型的地質層位而變化,既解決了薄層速度建模問題,又能得到精準的高、低頻速度分量和各向異性參數。其次,基于模型的層析反演將模型中地質層位的深度作為一個變量納入層析反演數據空間,可以同時反演速度結構與反射點位置(或反射層深度),具有更高的反演精度。本文將基于模型的層析反演方法應用于YM工區實際資料,并通過各向異性疊前深度偏移處理,提高了速度模型精度,解決了該區低幅度構造的成像問題。
2 基于模型的層析基本原理
2.1 基于模型的層析速度反演原理
基于模型的層析速度反演包括一個正演過程(計算炮點、反射點、檢波點的旅行時)和一個反演過程(根據旅行時和剩余時差更新速度模型)。首先建立層析成像矩陣,即通過對模型中的每一個反射點做射線追蹤完成正演,一條射線路徑對應一個等式,其合集即為層析成像矩陣

式中:tm為模型中的地震波旅行時;Sijk為第ijk網格中的慢度;d ijk為第ijk網格中的射線路徑長度。
而實際模型中地震波會出現旅行時差,可表示為

式中:Δtm為旅行時誤差;ΔSijk為第ijk網格中的慢度誤差。
旅行時差Δtm可以表示為

式中:A v為d ijk組成的系數矩陣,又稱靈敏因子;Δv為未知變量ΔSijk的向量。
根據偏移CRP道集中反射波同相軸的上翹或下垂,通過人工或自動拾取的方式得到剩余旅行時Δt。以共軛梯度法求解最小二乘解即可獲得Δv,從而得到更新后的速度體。
在式(2)中只考慮了慢度誤差對射線旅行時的影響,而忽略了速度更新對射線路徑的影響。假設速度更新量為正值,反射點位置在新速度模型中的深度位置下移,導致射線路徑變長,求取的速度比真實值偏高,反之亦然。因此,為了消除速度更新對射線路徑長度的影響,將模型的反射點位置的深度變化代入式(1)和式(2)之和,即

式中Δd ijk為模型中射線路徑長度變化分攤到第ijk網格中的長度。略去高階項ΔSijkΔd ijk,則式(4)變為

式(5)既考慮了速度誤差的影響,也考慮了反射點位置的深度變化,因此更加合理。式(5)又可表示為

在VTI介質中,式(6)表示為

式中:ε、δ為VTI介質各向異性參數;Aδ、Aε分別為δ、ε的系數矩陣;Δδ、Δε分別為δ、ε的誤差向量;A z為由Sijk組成的系數矩陣;Δz為Δd ijk的向量,即模型中反射點深度變化向量,通過求解該變量,即可反演模型中地質層位的深度(圖1)。
2.2 各向異性速度分析
Thomsen[10]于1986年給出了表征VTI介質彈性性質的5個參數,并對其進行定義和描述,其中描述P波各向異性的參數為VP、ε和δ,其中VP表示P波的垂直方向傳播速度,ε為P波各向異性的度量,δ值決定了P波在垂直方向附近相速度的各向異性程度。隨后,人們對VTI介質的各向異性速度進行了研究[11,12]。
對某一套地層,通過合成記錄標定可以得到頂、底反射時差,用單程時差與已知的地震層速度相乘得到層厚度ΔZI(未考慮各向異性),而實際的測井記錄則準確記錄了該套地層的頂、底深度,考慮了各向異性影響的真實層厚度表示為ΔZA,則

在分析地震資料的各向異性時,一般基于弱各向異性假設,即縱波速度取決于參數δ和ε,當ε=δ時,簡化為橢圓各向異性。因此在獲取了各向異性參數δ后,先假設ε=δ,進行基于VTI介質的初始疊前深度偏移,然后進行ε迭代,以求取準確的ε參數。
3 基于模型的層析成像速度模型建立方法
3.1 初始層速度模型的建立
3.1.1 淺層速度建模
由于覆蓋次數低、炮檢距較小的原因,在YM工區近地表難以獲得準確、可靠的剩余延遲,也就難以求取層速度。淺層速度模型的誤差會累積影響到深層目的層的成像。為此,采用微測井信息約束大炮初至的層析反演,彌補了應用反射波方法求取近地表速度的缺陷,得到的淺層速度場更加可靠。
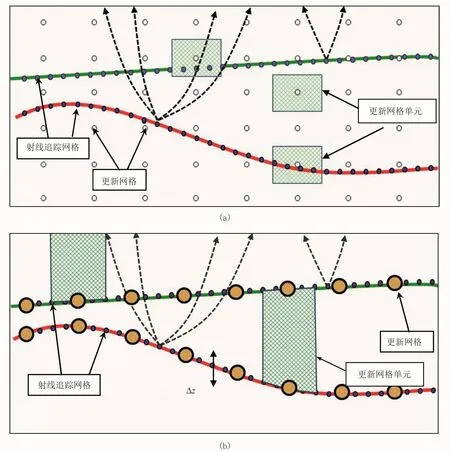
圖1 網格層析反演(a)與模型層析反演(b)網格尺度對比
3.1.2 中深層速度建模
YM工區的中深層構造相對簡單,可采用模型約束反演方法得到初始層速度。通過對疊前時間偏移處理得到的較準確的均方根速度場進行約束,建立一個模型約束的瞬時速度場。具體步驟為:首先建立初始的低頻趨勢模型速度場,然后對每一個反演的垂向函數,假設局部變化是一維模型,再使用最小二乘基本原理求解反問題。
3.2 基于模型的層析速度更新與優化
結合前面介紹的基本原理,基于模型的層析速度建模步驟如下。
(1)以近地表速度高速頂為分界面,將由大炮初至層析速度模型得到的淺層速度和由模型約束反演得到的中深層速度進行拼接,并作為初始速度進行速度迭代。
(2)計算旅行時并利用Kirchhoff積分法進行疊前深度偏移,通過大量CMP道集振幅樣點的不斷歸位,使真正反射點位置的振幅不斷疊加,從而提高信噪比。
(3)根據區域地質情況,在深度域地震數據體或時間域偏移數據體上選取測井聲波速度變化的界面進行地震解釋層位拾取,這樣的層位通常對應地震強反射同相軸,信噪比較高,獲得的剩余延遲可靠。在模型的地質層位上按固定間隔選取反射點(圖1藍色圓點)進行射線追蹤,可以大量減少反射點數量,節約計算量。
(4)通過交互方式和試驗確定合適的參數,如深度誤差值(深度偏移資料深度與實鉆井深度差)等,在研究區CRP偏移道集上進行批量應用,以獲得剩余延遲。
(5)在層位模型、偏移數據體、剩余延遲體、層速度體、δ體、ε體以及地震反射層屬性數據體(傾角體、方位角體、連續性體等)的基礎上建立數據庫。
(6)對每一個反射點進行射線追蹤完成正演,其中每一條射線路徑對應一個等式,從而建立層析反演的層析成像矩陣(式(5))。
(7)求解層析成像矩陣,更新每個網格的速度(式(7)、式(8)),得到初步迭代的各向異性速度體、δ體和ε體。
(8)經過層析速度反演的多次迭代,完成層析正演和反演過程,直至近道集基本拉平、剩余延遲為零,并輸出最終的各向異性速度體、δ體、ε體以及各向異性疊前深度偏移數據體。
結合YM工區實際情況,確定了基于模型層析速度反演的VTI各向異性疊前深度偏移流程(圖2)。

圖2 基于模型層析速度反演的VTI各向異性疊前深度偏移流程
4 應用實例及效果分析
TLM盆地YM工區三維地震資料于2006年采集,覆蓋次數為48,目的層為白堊系巴西改組。疊前時間偏移資料表明,該區存在一個北東向的低速帶,發育一個大型低幅度斷背斜構造(圖3a),在該構造有利部位部署的第一口井(1號井)即獲得突破。為加快該構造的評價,在該構造的3個高部位同時部署了3口評價井(2、3、4號井),評價井的設計高點海拔比1號井高20~30m,完鉆后3口井的實際海拔比1號井低20~30m,因而相繼失利(圖3b)。經綜合研究認為,由于工區速度復雜,沒有考慮各向異性,因而造成假構造的低速帶,導致鉆探失利。因此,針對速度變化大、存在低速陷阱等各向異性突出的地區,需采用基于模型層析速度反演的VTI介質疊前深度偏移技術,以提高低幅度構造成像質量和精度,并發現和落實與斷層相關的低幅度構造。

圖3 YM工區各向同性速度平面圖(a)和構造圖(b)圖a中紅色區域為低速區,圖b中紅色區域為背斜構造區
從CRP道集上看,通過模型層析反演反復迭代后,CRP遠道集被明顯拉平,目的層段能量聚焦,信噪比得到提高(圖4b)。
基于模型的層析反演在求取速度模型時,考慮到每個深度成像點,同時速度的更新以地質層位為對象,在不同層位依據剩余延遲情況獲得不同的速度變化值,速度精度得以提高,地質界面速度發生了明顯變化(圖5)。
式(8)表明:當各向同性速度大于各向異性速度時,δ>0;當各向同性速度小于各向異性速度時,δ<0。分析YM工區更新迭代后的δ體及ε體數據表明(圖6),目的層段的δ、ε值小于零(黃色至紅色范圍),表明各向同性速度小于各向異性速度,可能會造成異常低速區,使深度域構造圖的深度比實際深度小,從而出現假構造(圖3)。
圖7為各向同性、基于模型速度反演的各向異性深度域成像剖面。由圖可見:各向同性深度域剖面(圖7a)與基于模型速度反演的各向異性深度域剖面(圖7b)的整體構造形態基本一致,但后者(圖7b)的信噪比更高,波組特征清楚,斷面成像清晰可靠,目的層段的儲層內部反射特征明顯,低幅度構造成像質量好于前者(圖7a),有利于識別巖性圈閉;從地震地質標定來看,各向異性深度域剖面(圖7b)的古近系底(Bot_E)和白堊系巴西改組頂(Bot_K1bs)、底(Bot_K1bx)的層位深度比各向同性深度域剖面(圖7a)的大。

圖4 各向同性(a)和各向異性(b)道集
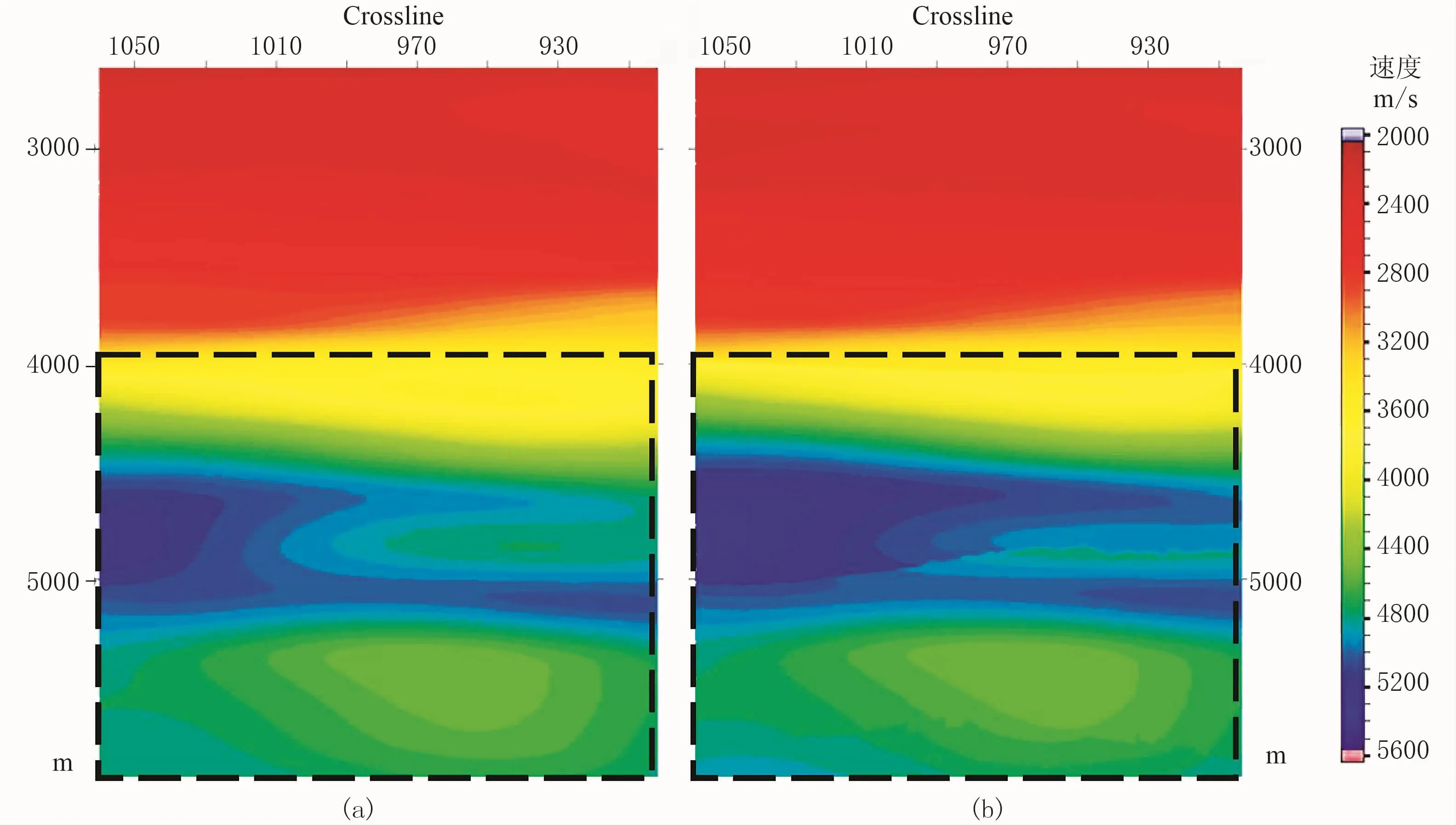
圖5 初始速度(a)、模型層析迭代更新速度(b)
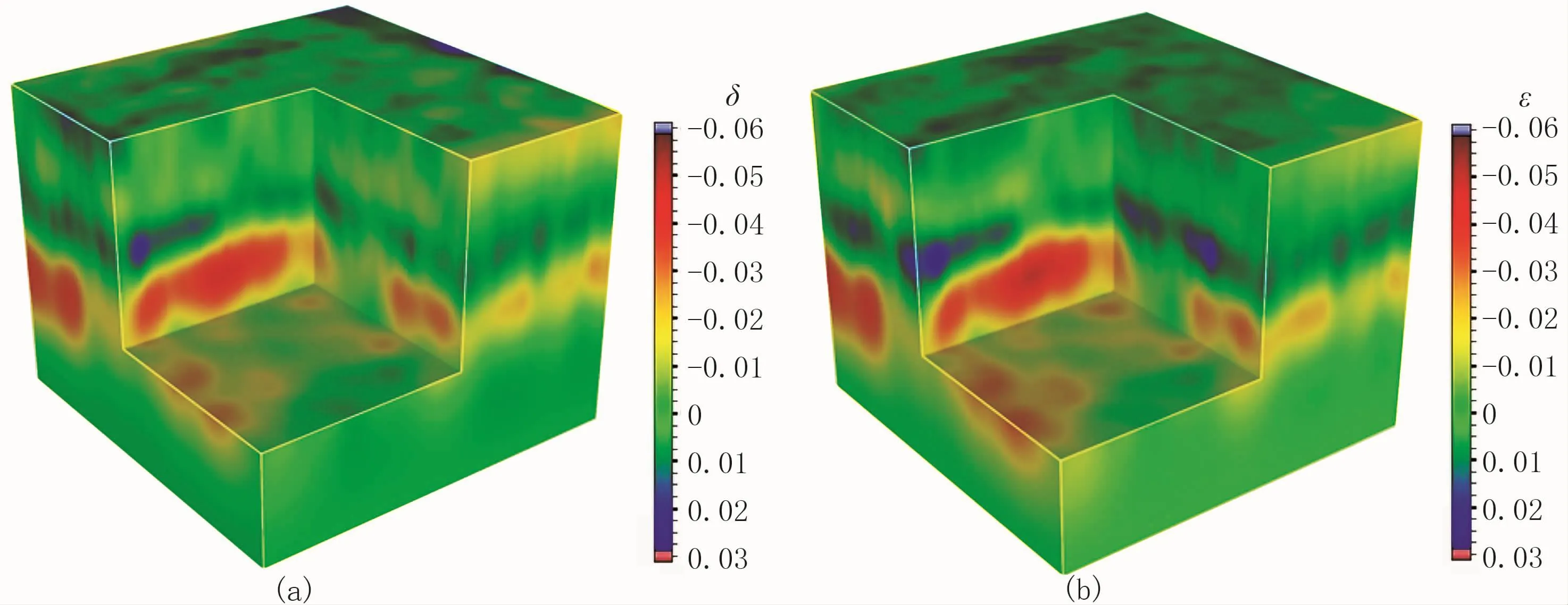
圖6 各向異性參數δ體(a)和ε體(b)

圖7 各向同性(a)、基于模型速度反演的各向異性(b)深度域成像剖面
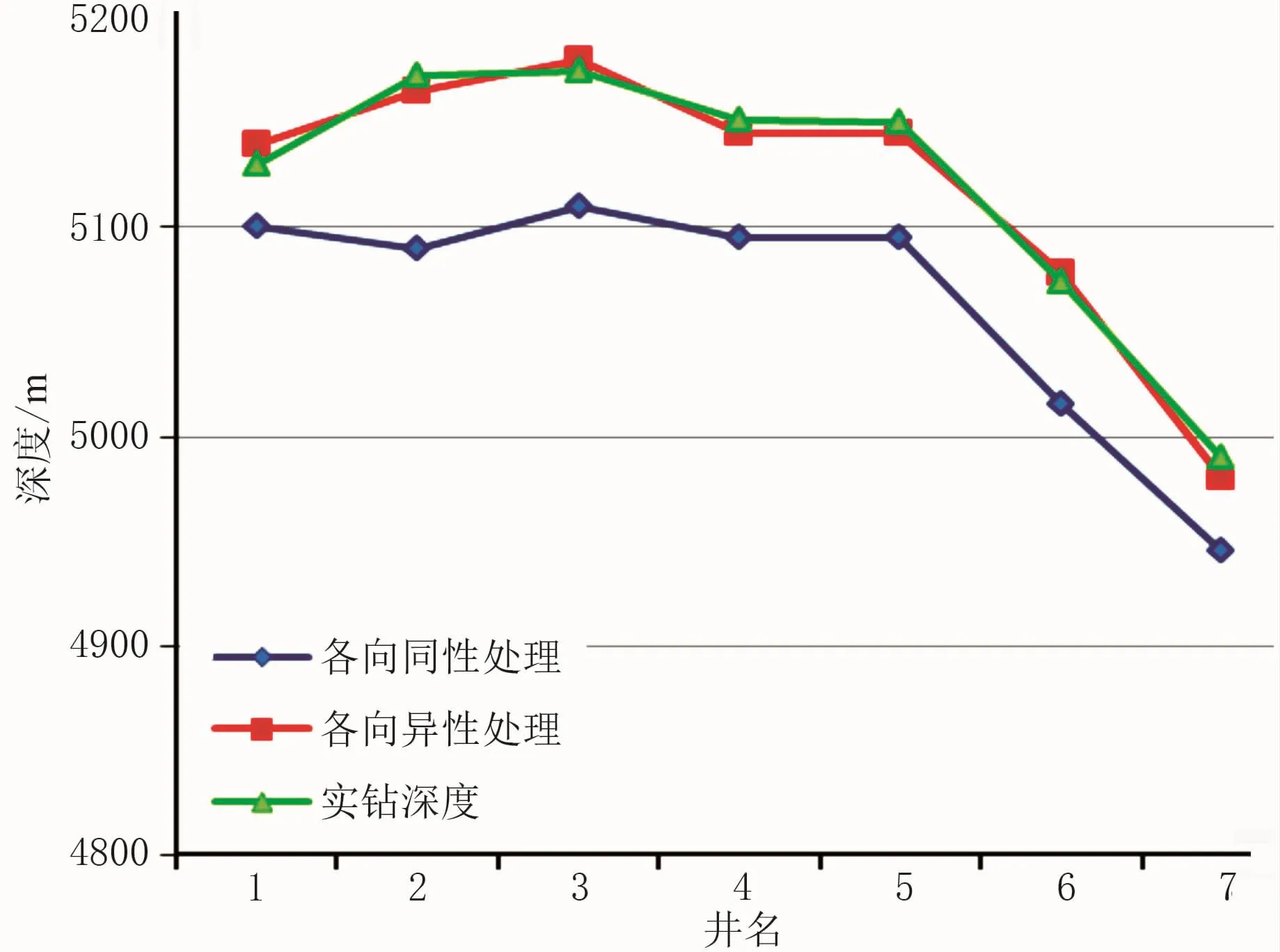
圖8 各向同性、各向異性疊前深度偏移與實鉆的深度數據
圖8為各向同性、各向異性疊前深度偏移與實鉆的深度數據。由圖可見,基于模型層析速度反演的VTI各向異性疊前深度偏移的深度數據與鉆井深度數據基本一致,而各向同性疊前深度偏移的深度比鉆井深度小。因此,基于模型層析的各向異性偏移可以滿足YM工區的低幅度構造的地震成像精度需求。圖9為YM工區疊前深度偏移各向異性速度場和構造圖。由圖可見,1號井處于構造高點上,2、3、4號井處于構造斜坡部位,證實北部的低速帶不存在。
5 結束語
基于模型的層析反演方法具有以下優點:
(1)模型受地質層位約束,即在橫向上是沿地質層位的網格進行速度和各向異性參數更新,尤其在縱向上層間網格尺度隨著地質層位而變化,解決了薄層速度建模問題,避免了單一網格尺度層析成像可能產生的射線覆蓋程度過低的問題。同時這種多尺度層析方法具有粗網格和細網格的剖分,既兼顧層析成像的分辨率和精度,又能得到精準的高、低頻速度分量和各向異性參數;
(2)基于模型的層析反演將模型的地質層位深度值作為一個變量納入層析反演,即對速度結構與反射點位置(或反射層深度)同時反演,具有更高的反演精度,接近地下實際速度模型,與鉆井深度更加吻合,使偏移成像質量更高;
(3)在迭代更新過程中,模型考慮了地層中的各向異性特點,如δ、ε等反映速度各向異性的參數,符合地下介質的實際情況。
總之,基于模型的層析反演方法解決了低速陷阱、速度橫向變化大的各向異性問題,得到的各向異性疊前深度偏移體的地質現象清晰、可靠,斷層歸位準確,其深度與鉆井深度差別小,落實了與斷層相關的低幅度構造。該方法有具有使用方便、計算效率高的特點,適合工業化推廣應用。

圖9 YM工區疊前深度偏移各向異性速度場(a)和構造圖(b)
[1] 李振春.地震偏移成像技術研究現狀與發展趨勢.石油地球物理勘探,2014,49(1):1-21.Li Zhenchun.Research status and development trends for seismic migration technology.OGP,2014,49(1):1-21.
[2] Stork C.Reflection tomography in the postmigrated domain.Geophysics,1992,57(5):680-692.
[3] Wang B,Pann K,Meek R A.Macro velocity model estimation through model based globally-optimized residual-curvature analysis.SEG Technical Program Expanded Abstracts,1995,14:1084-1087.
[4] Bloor R.Building velocity models using tomography.SEG Technical Program Expanded Abstracts,1998,17:1195-1198.
[5] Woodward M,Farmer P,Nichols D et al.Automated 3D tomographic velocity analysis of residual moveout in prestack depth migrated common image point gathers.SEG Technical Program Expanded Abstracts,1998,17:1218-1221.
[6] Kosloff D,Sherwood J,Koren Z et al.Velocity and interface depth determination by tomography of depth migrated gathers.Geophysics,1996,61(5):1511-1523.
[7] 馬彥彥,李國發,張星宇等.疊前深度偏移速度建模方法分析.石油地球物理勘探,2014,49(4):687-693.Ma Yanyan,Li Guofa,Zhang Xingyu et al.Strategy of velocity model building in prestack depth migration.OGP,2014,49(4):687-693.
[8] 李慧,成德安,金婧.網格層析成像速度建模方法與應用.石油地球物理勘探,2013,48(增刊1):12-16.Li Hui,Cheng Dean,Jin Jing.Velocity model building based on grid tomography.OGP,2013,48(S1):12-16.
[9] Robein E.Seismic Imaging:A Review of the Techniques,Their Principles,Merits and Limitations.Hutten,Netherlands,2010.
[10] Thomesen L.Weak elastic anisotropy.Geophysics,1986,51(10):1954-1966.
[11] Tsvankin I D.橫向各向同性介質速度分析和時深轉換(張青偉譯).國外油氣勘探,1997,9(4):504-513,517.
[12] 李源,劉偉,劉微等.各向異性全速度建模技術在山地地震成像中的應用.石油物探,2015,54(2):157-164.Li Yuan,Liu Wei,Liu Wei et al.Application of anisotropic full velocity modeling in the mountainous seismic imaging.GPP,2015,54(2):157-164.

P631
A
10.13810/j.cnki.issn.1000-7210.2017.01.013
管文勝,段文勝,查明,孫琦,宋小平,蘇洲.利用基于模型的層析速度反演進行低幅度構造成像.石油地球物理勘探,2017,52(1):87-93.
1000-7210(2017)01-0087-07
*山東省青島市黃島區長江西路66號中國石油大學(華東)地球科學與技術學院,266580。Email:guanws-tlm@petrochina.com.cn
本文于2015年12月30日收到,最終修改稿于2016年11月21日收到。
本項研究受國家重大科技專項課題(2011ZX05001-002-003、2011ZX05001-001-006)聯合資助。
(本文編輯:劉勇)
管文勝 高級工程師,1968年生;1991年獲江漢石油學院(現長江大學)勘查地球物理專業學士學位;2009年獲中國地質大學(武漢)構造地質學專業碩士學位;現為中國石油大學(華東)地球科學與技術學院博士研究生。目前在塔里木油田分公司勘探開發研究院從事地震處理、解釋一體化及構造、圈閉評價等方面的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03