基于AP-DBSCAN聚類的彈道目標進動特征提取*
2017-11-01 22:48:58馮存前王義哲
彈箭與制導學報 2017年3期
關鍵詞:信息
陳 蓉, 馮存前,2, 王義哲, 許 丹
(1 空軍工程大學防空反導學院, 西安 710051; 2 信息感知技術協同創新中心,西安 710077)
基于AP-DBSCAN聚類的彈道目標進動特征提取*
陳 蓉1, 馮存前1,2, 王義哲1, 許 丹1
(1 空軍工程大學防空反導學院, 西安 710051; 2 信息感知技術協同創新中心,西安 710077)
進動是彈道目標識別的重要特征。以錐體彈頭為研究對象,文中提出了一種基于寬帶雷達組網的錐體目標進動特征提取方法。首先建立彈道目標進動模型,利用AP聚類算法,根據回波信號的強度進行初步聚類,然后通過DBSCAN算法,剔除噪聲點,將非噪聲信號分類并求平均值。在此基礎上,分別估計出不同雷達體制下各散射中心的幅、相信息,進而解算出彈道目標的進動參數。仿真結果表明,在信噪比較小的情況下,目標的進動參數估計精度仍較高。
寬帶雷達;AP聚類;DBSCAN密度聚類;進動特征提取
0 引言
彈道目標中段飛行在整個彈道時間內占據了80%[1-2],是彈道目標識別與打擊的重要階段。進動是識別彈頭和誘餌的有效特征。進動特征提取的關鍵在于微多普勒信息的分離與提取,雷達組網中,不同雷達分離得到的微多普勒信息之間的匹配是實現雷達信息融合處理的關鍵[3]。文獻[4]利用頻譜熵對窄帶雷達網獲取的瞬時頻率變化進行匹配,根據不同視角下錐頂與錐底散射中心的瞬時頻率關系實現對參數的粗估計,再進行精估計處理得到進動參數。文獻[5]針對旋轉目標理想散射點幅度、中值、相位之間的穩定關系,對多普勒曲線進行匹配,根據高分辨一維距離像長度與進動角、幾何尺寸以及雷達觀測角之間的關系,通過變視角觀測進行求解。文獻[6]以90°視角劃分為兩種觀測情況,分別對錐頂散射中心和錐底散射中心進行相關,根據散射中心運動規律和距離像分布情況,對進動參數和結構參數進行提取,在目標散射中心連續可觀測條件下,參數的提取精度受參數條件影響較小。
文中基于寬帶雷達組網,首先分析了目標進動模型,在寬帶雷達體制下,給出信號的幅度、相位信息滿足的線性關系及幅度信息與進動角θ、雷達視角βr、雷達結構參數hs之間的關系。在第3節,采用AP-DBSCAN聚類方法分離目標回波的微多普勒信息。首先根據信號強度對回波數據進行劃分,使每一區間內的數據強度大致均勻,采用AP聚類方法,依據回波信號的強度進行初步聚類,然后根據信號初步聚類結果進行DBSCAN密度聚類,剔除噪聲參考點,對非噪聲參考點分類求平均得到各散射中心對應的微多普勒信息。在此基礎上,運用最小二乘法擬合出寬帶雷達下散射點的幅、相信息,并求解進動參數。最后通過仿真驗證文中方法的有效性和可靠性。
1 錐體目標微動特征分析
1.1 進動模型
圖1所示為錐體目標進動模型。O-XYZ為雷達網坐標系[7]。以目標自旋軸和錐旋軸的交點O′為坐標原點,建立平行于雷達網坐標系的彈體直角坐標系O′-xyz。定義初始時刻,自旋軸與錐旋軸所在平面為yO′z平面,x軸方向符合右手螺旋準則。自旋軸與錐旋軸夾角為θ,錐旋頻率為ωc,錐體目標高為H,底面半徑為r,旋轉中心O′到底面的距離為h。錐體是旋轉對稱的,錐頂為A,雷達視線方向與錐體旋轉對稱軸構成的平面與錐體底面邊緣圓環結構相交于近視點p和遠視點q兩點,O′p、O′q與對稱軸的夾角均為η。
(αi,βi)為第i部雷達在O′-xyz中的視角,βri為雷達視線與錐旋軸的夾角,ψi為雷達視線方向與目標自旋軸夾角[8],則有:
cosψi(t)=cosβricosθ+sinβrisinθsin(ωct-αi)
(1)
雷達Mi的視線方向在O′-xyz坐標系中的單位方向向量為:
ei=[cosβicosαi,cosβisinαi,sinβi]T
(2)
A、p、q三點在t時刻的微距離經泰勒展開[7]可近似表示為:
(3)
式中:aA、bA、ap、bp、aq、bq、c均為調制系數,且只與錐體目標的尺寸、進動參數有關,根據錐體目標的散射特性易知[8]:
aA=(H-h)cosθcosβr,bA=(H-h)sinθsinβr
(4)
1.2 信號模型
假設平動分量已被完全補償,對于高分辨雷達而言,雷達分辨率高,目標尺寸遠大于雷達的距離分辨單元,可以獲得雷達的高分辨距離像。設第n部寬帶雷達載頻為fn,Tp為脈沖寬度,γ為調頻率,m=0,1,…,M-1為發射脈沖的序號,Tref為寬帶雷達測得的參考時間。Tr為脈沖重復周期,tm=mTr是慢時間。目標的回波信號經快速傅里葉變換后將包絡斜置項去除[2],可得到:
(5)
式中RΔni表示第n部寬帶雷達測得的散射中心i相對于O′點的徑向距離。由此可以看出,距離像的峰值出現在:

(6)
則散射點的微距離可以表示為:
(7)
式中:rni為第i個散射中心的多普勒信息;Brni、Bpn(ω)分別為散射中心i對應的幅度信息和相位信息,且滿足:
式中:bnA、bnp、bnq、cn均為對應散射中心的調制系數。Δt為采樣間隔。
2 微動信息的提取與匹配
由于受到雜波與噪聲的影響,回波信號的數據差異較大,如果直接進行聚類,聚類結果不均勻。根據文獻[9],考慮對數據進行劃分,使每一劃分區間內數據強度相對均勻,根據劃分區間確定參數進行聚類。
2.1AP-DBSCAN聚類分析
AP聚類是B J Frey等人于2007年提出的一種新聚類算法。這種算法能夠高效的處理大數據集,與傳統聚類算法不同的是,這種算法在開始時將所有數據點均視為聚類中心,避免了初始聚類點選擇對算法結果的影響。在兩個信息矩陣交替更新的過程中不斷搜索聚類中心,自動從數據點中搜索聚類中心的位置及個數,最終使所有數據點到最近的聚類中心的相似度之和最大。由于AP聚類算法直接應用于信號識別有嚴重的增批現象,只能在小范圍內實現聚類,因此對上述結果進行進一步聚類處理以達到良好效果。DBSCAN算法是基于密度的聚類算法,對噪聲數據不敏感,同AP算法一樣不需要先驗信息,但是計算復雜度較高,不適合數據量較大的信號處理。而經過AP聚類后,回波數據點集中,待處理數據點減少,有效改善了這一問題[10]。
在AP聚類中,把每個參考點的初始偏向參數p(k)都設為P,通過對P值的調整可以改變類的數目。在兩點之間傳遞的信息用責任度矩陣(responsibility)和可用度矩陣(availability)表示。責任度矩陣中r(i,k)表示從點xi向點xk傳遞信息,代表參考點xk作為xi的類代表點的責任程度,是xk積累的能量。可用度矩陣中a(i,k)表示從點xk向點xi傳遞消息,代表參考點xi選xk作類代表點的可用程度,是xi的積累能量。迭代過程中,這兩個矩陣交替更新,計算回波信號中數據點間的責任度與可用度,并求和有:
(10)
(11)
r(i,k)+a(i,k)=s(i,k)+a(i,k)-
(12)
Step1根據接收到的回波信息初始化每個回波數據點的初始偏向參數矩陣p(k),責任度矩陣R(i,k)及可用度矩陣A(i,k)。
Step2根據式(10)、式(11),計算回波數據點間的責任度值、可用度值。
Step3引入阻尼因子λ,λ∈[0,1],通過對λ的調整改變算法的平穩性及收斂性。加權公式為:
(13)
為減少算法震蕩,設置阻尼因子為0.9。
當迭代次數超過設定值或聚類中心不再發生改變時停止,得到聚類數據集D(i)。
Step4根據Step3得到的數據集密度確定DBSCAN的Eps。以聚類數據集D(i)中的數據點di為參考點,計算數據點di+1到參考點di的距離d,若有d
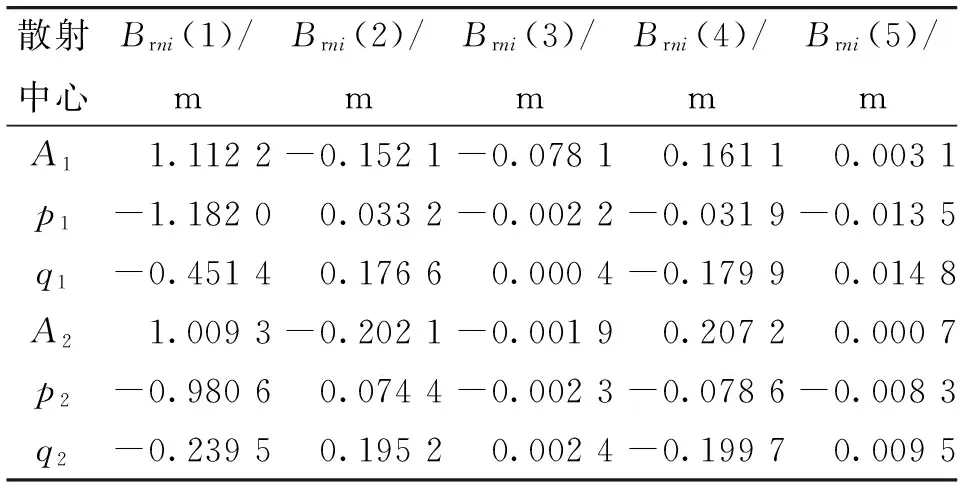
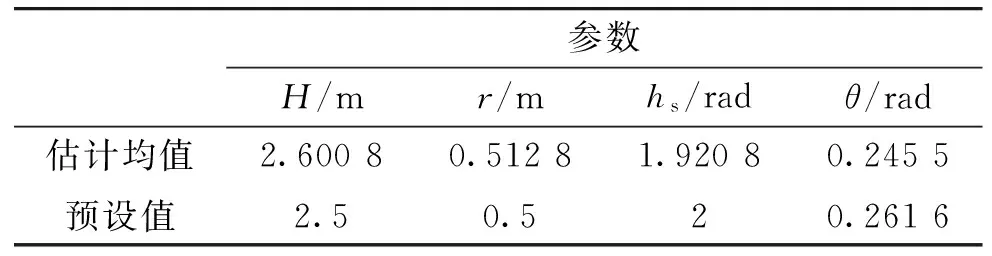
Step5在處理回波數據時,若數據集中di與多個參考點都滿足d Step6將參考點密度信息diρ與密度閾值Th進行比較,若有diρ 2.2 微動信息解算 (14) 令hs=H-h,式(14)中有3個未知參量,選取至少兩部雷達構成雷達組網建立線性方程組,令x=cos2θ,y=hs2·x(1-x),則方程組滿足: (15) (16) CX=B (17) 求解得到未知參量βn、hs、θ。 大部分情況下,雷達在頂點散射中心A附近觀測目標[8],當雷達視線角大于半錐角時散射中心q被遮擋,則錐體的距離像長度可表示為: |rA(t)-rp(t)|=Hcosψi(t)-rsinψi(t) (18) 通常雷達觀測條件滿足雷達視線角大于半錐角,所以可以采用式(18)作為后續計算的輸入。 因此,對任一時刻t1,設L(t1)為錐體彈頭在雷達視線方向上的投影長度,取t1時刻錐體距離像的參數: L(t1)=|rA(t1)-rp(t1)|= Hcosψi(t1)-rsinψi(t1) (19) 式中:兩個未知量H、r可以通過任兩個時刻的散射中心A、p的距離像信息求解。 圖2為寬帶雷達對應的多普勒曲線,根據2.1節的方法進行提取并實現散射中心的匹配,結果如圖3所示。 根據2.1節得到的各散射中心對應的微多普勒信息,文中第2.2節通過最小二乘擬合可以得到多個散射中心的幅度如表1所示。 表1 寬帶雷達散射中心的幅度信息 表2 彈道目標的進動特征值 圖4(a)表示雷達視線角β的估計誤差隨進動角θ的估計誤差增大而變化。圖4(b)表示雷達視線角β隨質心O與頂點的距離hs的估計誤差增大而變化。可以看出隨著θ與hs的估計誤差增大,β的估計誤差也隨之增大,且θ的估計誤差相對于hs對雷達視線角的估計精度影響較大。 將文中方法與其它進動參數估計方法進行比較發現,文獻[7]采用兩參數拓展Hough變化,運算量大大減少,運算時間僅為3.052 7 s低于文中,但同等仿真條件下,其進動角估計誤差為17%,錐高估計誤差為14%,而文中對應參數估計誤差分別為4.03%和6.16%。文獻[5]通過寬帶雷達組網獲取一維距離像,對各散射點對應的時間-距離像進行比較實現匹配,進而解算出進動參數與結構參數實現三維重構,當仿真條件相同時,錐體半徑估計相對誤差為2.12%,略低于文中的2.26%,進動角估計誤差為0.87%,低于文中的4.03%,但該方法將3個散射中心均視為理想散射中心,模型簡單與實際情況不符。這也證明了文中方法的可行性。文中建立在寬帶雷達組網體制下,仿真采用了兩部寬帶雷達實現了對參數的估計。實際應用中,可根據實際情況增加雷達的數量,提高估計精度。 微動特征識別是彈道目標識別的關鍵,結合當前雷達應用的實際情況,文中通過建立寬帶雷達組網,在存在非理想滑動散射中心的條件下,提出通過AP-DBSCAN聚類方法實現微動信息的提取與散射中心的匹配,該方法無需確定數據初始聚類中心,避免了DBSCAN算法在處理不均勻回波數據樣本時識別率較低的問題,發揮了兩種算法的優勢。在此基礎上,提取出了彈道目標的進動特征。 文中僅對旋轉對稱的錐體彈道目標進行了分析,實際情況中,彈道目標有多種模型,其中有尾翼的模型是一個發展的趨勢。尾翼對于回波的調制作用使對回波的相關處理更加復雜,有效分離并提取有翼目標的運動特征將是下一步研究的方向。 [1] CHEN V C. Advances in applications of radar micro-Doppler signatures [C]∥2014 IEEE Conference Antenna Measurements & Application. New York: IEEE Antibes Juan-les-pins, 2014. [2] 張群, 羅迎. 雷達目標微多普勒效應 [M]. 北京: 國防工業出版社, 2013: 22-81. [3] 李靖卿, 馮存前, 張棟. 基于自適應視野聚類匹配的多目標分離與提取 [J]. 系統工程與電子技術, 2015, 37(9): 1974-1979. [4] 韓勛, 杜蘭, 劉宏偉. 基于窄帶雷達組網的空間錐體目標特征提取方法 [J]. 電子與信息學報, 2014, 36(12): 2956-2962. [5] 雷騰, 劉進忙, 楊少春, 等. 基于三站一維距離像融合的彈道目標特征提取方法研究 [J]. 宇航學報, 2012, 33(2): 228-234. [6] 艾小鋒, 鄒小海, 李永禎, 等. 基于時間-距離像分布的錐體目標進動與結構特征提取 [J]. 電子與信息學報, 2011, 33(9): 2083-2088. [7] 張棟, 馮存前, 賀思三, 等. 基于滑動散射條件的彈道目標微動特征和結構特征提取 [J]. 彈箭與制導學報, 2015, 35(2): 131-134. [8] 寧超, 黃璟, 黃培康. 基于HRRP的進動錐體目標特征參數求解方法 [J]. 系統工程與電子技術, 2014, 36(4): 650-655. [9] 郭秀娟, 陳瑩. AP聚類算法的分析與應用 [J]. 吉林建筑大學學報, 2013, 30(4): 58-61. [10] 李雙慶, 慕升弟. 一種改進的DBSCAN算法及應用 [J]. 計算機工程與應用. 2014, 50(8): 72-76. [11] 賀思三, 趙會寧, 馮存前. 多視角距離像序列彈道目標的進動參數估計 [J]. 信號處理, 2013, 29(8): 1027-1035. ProcessionFeatureExtractionofBallisticTargetsBasedonAP-DBSCANClusteringAlgorithm CHEN Rong1, FENG Cunqian1,2, WANG Yizhe1, XU Dan1 (1 Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China;2 Collaborative Innovation Center of Information Sensing and Understanding, Xi’an 710077, China) Precession is a critical feature in the identification of ballistic targets. Aimed at cone-shaped warhead, a method to extract the precession feature of cone-shaped target, which is based on the mixed netted radars consisting of both narrowband and wideband ones, is proposed. Firstly a precession model of ballistic target is developed, and the AP clustering algorithm is introduced to cluster the echo signals on the basis of the signal intensity. Noisy points are deleted through the DBSCAN algorithm and the average values of non-noisy signals are calculated after the classification. Based on the work mentioned above, the amplitude and phase information of each scattering center in different netted radars is estimated. Then the precession parameters of ballistic targets are calculated. Simulation results validate that the precision of estimation on the precession parameters stays on high accuracy under the condition of a low signal noise ratio (SNR). broadband radar; affinity propagation(AP); DBSCAN; procession feature extraction TN957 A 2016-06-27 國家自然科學基金(61372166)資助 陳蓉(1992-),女,山西太原人,碩士研究生,研究方向:雷達信號處理。
3 進動特征提取
4 仿真分析

5 結束語
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
