基于串級ADRC的四旋翼飛行器懸停控制
2017-11-01 14:18:45葉孝璐俞立張文安張丹
關(guān)鍵詞:設(shè)計(jì)
葉孝璐,俞立,張文安,張丹
?
基于串級ADRC的四旋翼飛行器懸停控制
葉孝璐,俞立,張文安,張丹
(浙江工業(yè)大學(xué)信息工程學(xué)院,浙江杭州,310023)
針對四旋翼懸停控制問題,提出一種串級自抗擾控制方法。首先,根據(jù)歐拉及牛頓定理建立四旋翼飛行器的動力學(xué)模型,并解耦為雙回路、多子系統(tǒng)的結(jié)構(gòu)。其次,根據(jù)四旋翼飛行器系統(tǒng)的自身結(jié)構(gòu)特點(diǎn),設(shè)計(jì)串級自抗擾控制器,為獲取較好的內(nèi)環(huán)輸入信號,對外環(huán)設(shè)計(jì)線性ADRC控制器;同時(shí),設(shè)計(jì)內(nèi)環(huán)非線性ARDC控制器以獲得更好的跟蹤性能。針對系統(tǒng)內(nèi)部參數(shù)攝動和存在外部干擾等不確定性,引入擴(kuò)張狀態(tài)觀測器對系統(tǒng)的狀態(tài)和內(nèi)外擾動進(jìn)行實(shí)時(shí)估計(jì),并利用非線性誤差反饋控制律進(jìn)行補(bǔ)償,消除內(nèi)外擾動的影響。最后,仿真驗(yàn)證所提控制策略的有效性和優(yōu)越性。
四旋翼飛行器;串級自抗擾算法;擴(kuò)張狀態(tài)觀測器;懸停控制
四旋翼飛行器具有廣闊的民用和軍用前景[1?2],近些年已受到國內(nèi)外研究學(xué)者廣泛關(guān)注[3?5]。四旋翼飛行器是一個四輸入六輸出的欠驅(qū)動、非線性、強(qiáng)耦合系統(tǒng)[6?7],給控制器的設(shè)計(jì)帶來了很大困難。另外,其動力學(xué)模型的復(fù)雜性、參數(shù)不確定性和建模過程中簡化導(dǎo)致建模不精確等問題[8?9],對其控制器的魯棒性、抗干擾性提出了較高的要求[10?11]。針對四旋翼飛行器懸停控制問題,目前使用的方法主要有PID控制[12]、反步控制[13]、嵌套飽和控制[14]等。基于PID的四旋翼飛行器懸停控制器將控制系統(tǒng)分為幾個獨(dú)立的通道,分別設(shè)計(jì)相應(yīng)的PID控制算法,該方法具有控制技術(shù)成熟、易于實(shí)現(xiàn)的特點(diǎn),但是其抗干擾性較差,如環(huán)境改變即要重新調(diào)整參數(shù)。基于反步法的四旋翼飛行器懸停控制器通過系統(tǒng)的狀態(tài)方程設(shè)計(jì)虛擬控制,構(gòu)造合適的Lyapunov函數(shù)來求控制律,具有良好的跟蹤性能、且具有無超調(diào)、調(diào)節(jié)時(shí)間快的優(yōu)點(diǎn),但是該方法針對滿足嚴(yán)格反饋控制結(jié)構(gòu)的系統(tǒng),對系統(tǒng)要求高。基于嵌套飽和的四旋翼飛行器懸停控制具有計(jì)算量小、魯棒性強(qiáng)和全局漸近穩(wěn)定的優(yōu)點(diǎn),但是應(yīng)用該方法需要將四旋翼動力學(xué)模型轉(zhuǎn)化為嚴(yán)格的前饋級聯(lián)結(jié)構(gòu),而針對四旋翼飛行器這種欠驅(qū)動系統(tǒng)只能局部反饋線性化,不能完全反饋線性化。針對以上問題,本文作者提出用自抗擾算法來解決四旋翼飛行器的懸停控制問題,該算法比反步法和嵌套飽和算法對系統(tǒng)模型的要求低,而對擾動的抑制能力和控制精度又比PID算法高。針對存在內(nèi)部未建模項(xiàng)和存在外部干擾等不確定性的四旋翼飛行器系統(tǒng),本文作者將系統(tǒng)解耦為雙回路、多子系統(tǒng)的結(jié)構(gòu),并提出了一種串級自抗擾控制方法,引入擴(kuò)張狀態(tài)觀測器對系統(tǒng)的狀態(tài)和內(nèi)外擾動進(jìn)行實(shí)時(shí)估計(jì),并利用非線性誤差反饋控制律進(jìn)行補(bǔ)償,降低了對模型精度的要求,消除內(nèi)外擾動的影響。基于串級ADRC的四旋翼飛行器懸停控制器外環(huán)為位置環(huán),內(nèi)環(huán)為姿態(tài)環(huán),外環(huán)ADRC控制器輸出的控制量為內(nèi)環(huán)的輸入。為獲得較平緩的外環(huán)控制輸出,外環(huán)采用線性ADRC控制器;為得到更好的跟蹤效果,在內(nèi)環(huán)設(shè)計(jì)非線性ADRC控制器。最后通過仿真驗(yàn)證所設(shè)計(jì)控制器的有效性和優(yōu)越性。
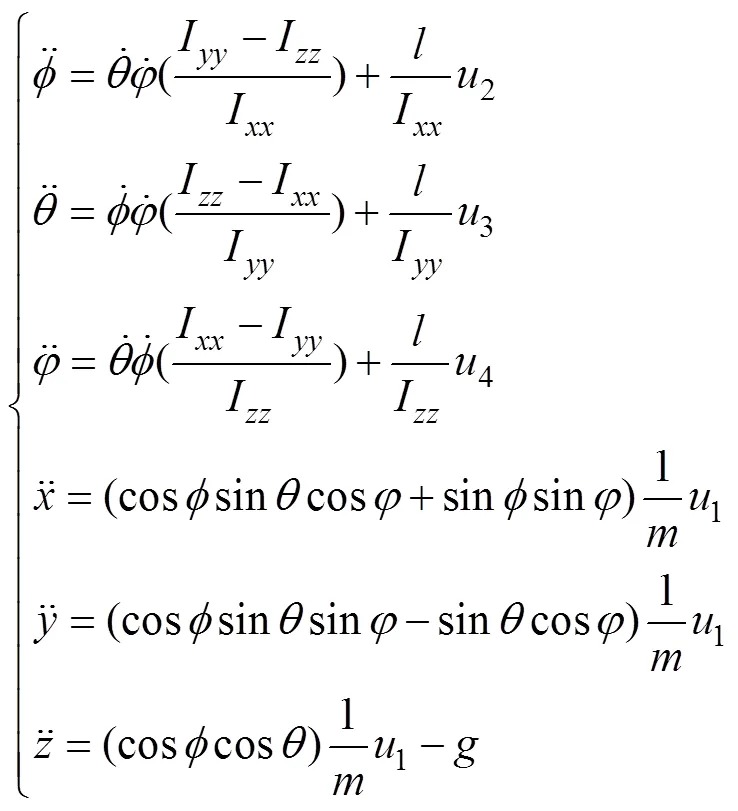
1 問題的描述
對螺旋槳的角速度的控制量為
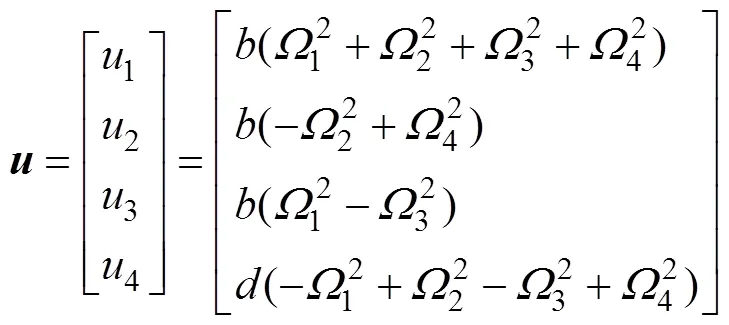
其中:為四旋翼飛行器的質(zhì)量;為四旋翼的旋翼臂展;I,I和I分別為軸、軸和軸的慣量;1,2,3和4為螺旋槳的角速度;為推力系數(shù);為阻力系數(shù)。
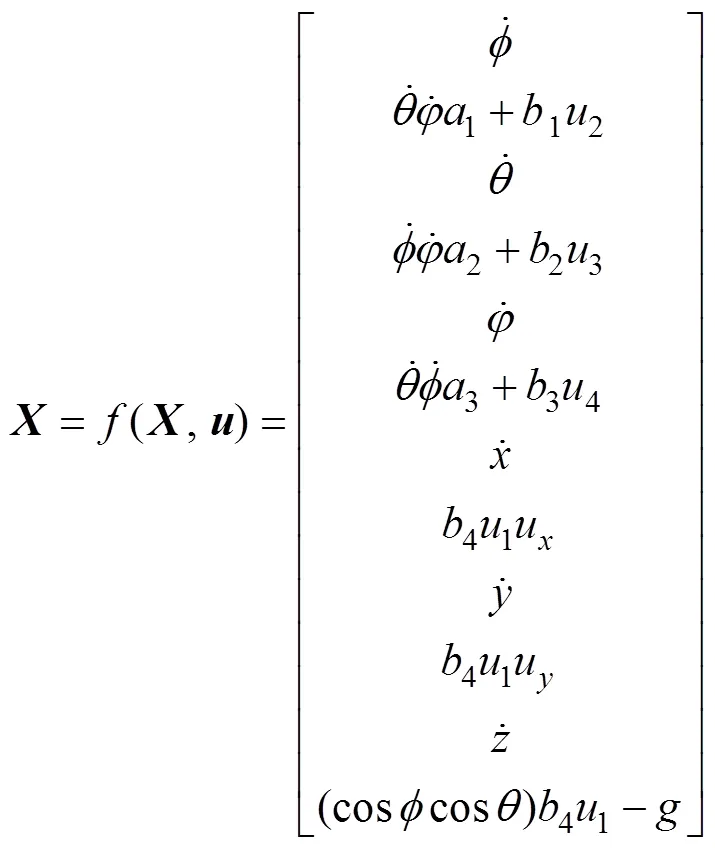
選擇狀態(tài)向量為


則可將式(1)表示為狀態(tài)空間模型:
根據(jù)其建模動力學(xué)方程雙回路、多子系統(tǒng)的結(jié)構(gòu)的特點(diǎn),可以將懸停控制器設(shè)計(jì)為串級結(jié)構(gòu),內(nèi)環(huán)為姿態(tài)環(huán),外環(huán)為位置環(huán)。并根據(jù)ADRC算法比反步法和嵌套飽和算法對系統(tǒng)模型的要求低,而對擾動的抑制能力和控制精度又比PID算法高的優(yōu)點(diǎn)。本文提出串級自抗擾控制器來解決四旋翼飛行器的懸停問題,內(nèi)環(huán)和外環(huán)均采用自抗擾算法[19]設(shè)計(jì)控制器,偏航角采用ADRC控制器進(jìn)行鎖定,四旋翼飛行器串級ADRC控制框圖如圖1所示。
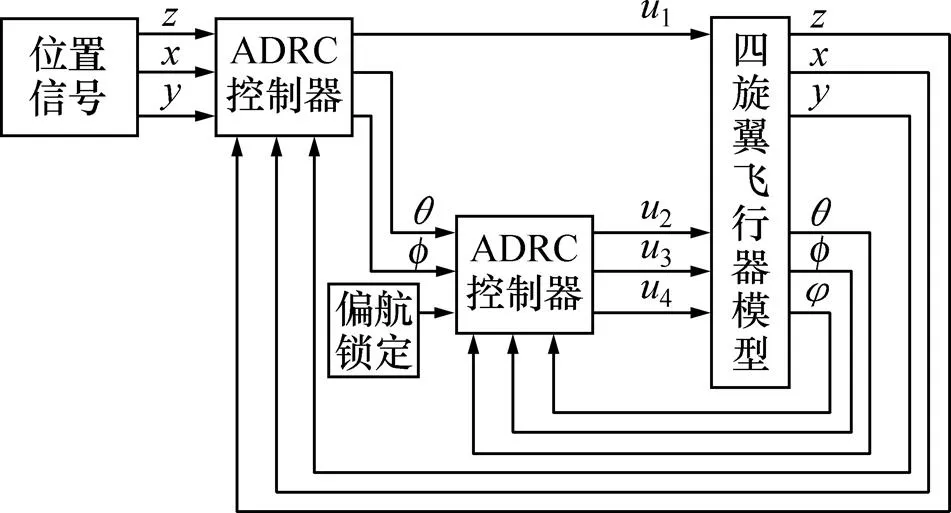
圖1 四旋翼飛行器串級ADRC控制框圖
2 串級ADRC控制器設(shè)計(jì)
2.1 外環(huán)控制器設(shè)計(jì)

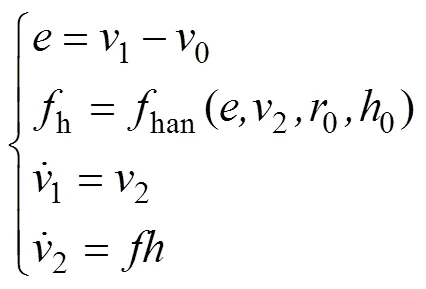
1) 跟蹤微分器,用來安排過渡過程,給定信號0作為參考輸入:
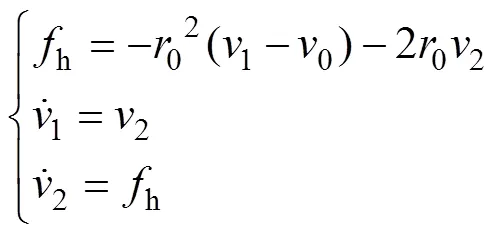
其中:參數(shù)0為跟蹤微分器的快速因子。
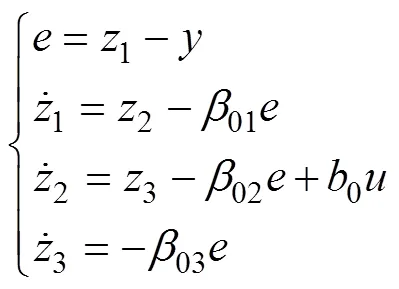
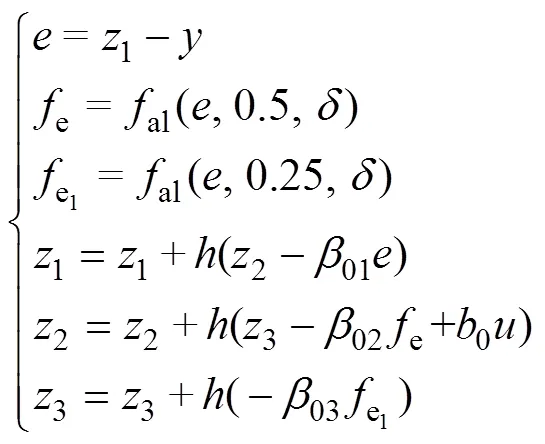
2) 擴(kuò)張狀態(tài)觀測器,對系統(tǒng)的狀態(tài)和擾動進(jìn)行實(shí)時(shí)估計(jì)與補(bǔ)償。

3) 狀態(tài)誤差反饋控制律:
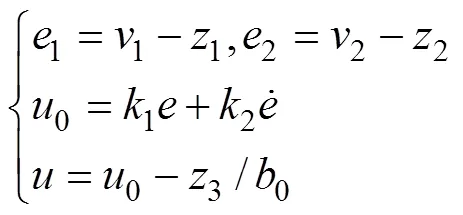
式中:k1和k2分別為比例和微分系數(shù),可以通過極點(diǎn)配置取,。
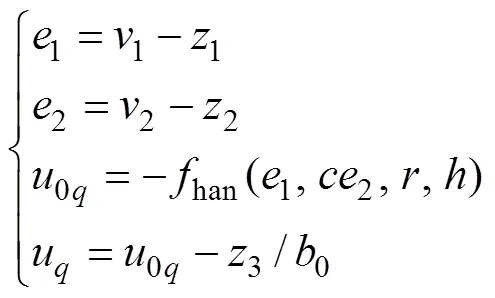
2.2 內(nèi)環(huán)控制器設(shè)計(jì)
四旋翼飛行器的內(nèi)環(huán)為姿態(tài)環(huán),分為3個獨(dú)立的控制回路:橫滾角控制回路、俯仰角控制回路和偏航角控制回路。四旋翼飛行器內(nèi)環(huán)的非線性ADRC的控制框圖如圖3所示。
自抗擾控制器包括跟蹤微分器、擴(kuò)張狀態(tài)觀測器、狀態(tài)誤差反饋控制律3個部分。其設(shè)計(jì)過程如下。
1) 安排過渡過程,給定信號0作為參考輸入。
2) 擴(kuò)張狀態(tài)觀測器,對系統(tǒng)的狀態(tài)和擾動進(jìn)行實(shí)時(shí)估計(jì)與補(bǔ)償。
3) 狀態(tài)誤差反饋控制律:

3 仿真結(jié)果
在Matlab/Simulink環(huán)境搭建四旋翼飛行器仿真控制系統(tǒng),四旋翼無人機(jī)仿真參數(shù)如表1所示[20]。串級ADRC控制器的內(nèi)環(huán)和外環(huán)仿真參數(shù)如表2和3所示。其中:軸的微分跟蹤器為非線性,0=0.001;軸的擴(kuò)張狀態(tài)觀測器為非線性,=0.01。
圖4所示為四旋翼飛行器的飛行軌跡曲線。當(dāng)四旋翼飛行器從地面坐標(biāo)系位置(0,0,0)飛至目標(biāo)位置(1,1,3)時(shí),設(shè)定仿真時(shí)間為3 s,使得四旋翼飛行器懸停在(1,1,3)處。由圖4可見:采用串級ADRC控制器的四旋翼飛行器能夠快速平穩(wěn)地飛向目標(biāo)位置并懸停于目標(biāo)位置,控制效果良好。
串級ADRC控制器的外環(huán)為位置環(huán)。本文在仿真實(shí)驗(yàn)中得出,若外環(huán)設(shè)計(jì)非線性ADRC控制器,則控制器輸出的控制量信號為幅值很大高頻噪聲信號,而這類外環(huán)控制器輸出的控制量是不滿足要求的,其原因是:1) 外環(huán)的控制器輸出作為內(nèi)環(huán)輸入的目標(biāo)跟蹤信號,而內(nèi)環(huán)控制器無法跟蹤高頻信號。2) 外環(huán)的控制器輸出即是四旋翼飛行器的3個姿態(tài)角,其實(shí)信號的幅值太大,在實(shí)際情況中,四旋翼飛行器早已翻滾墜機(jī)而失控。
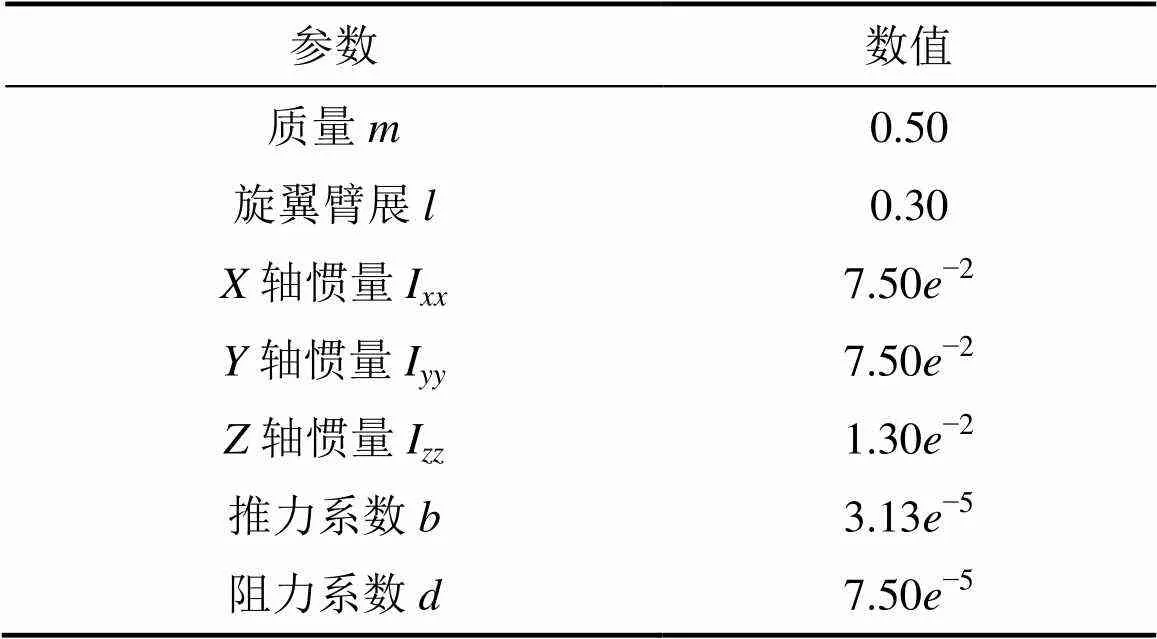
表1 四旋翼無人機(jī)的仿真參數(shù)
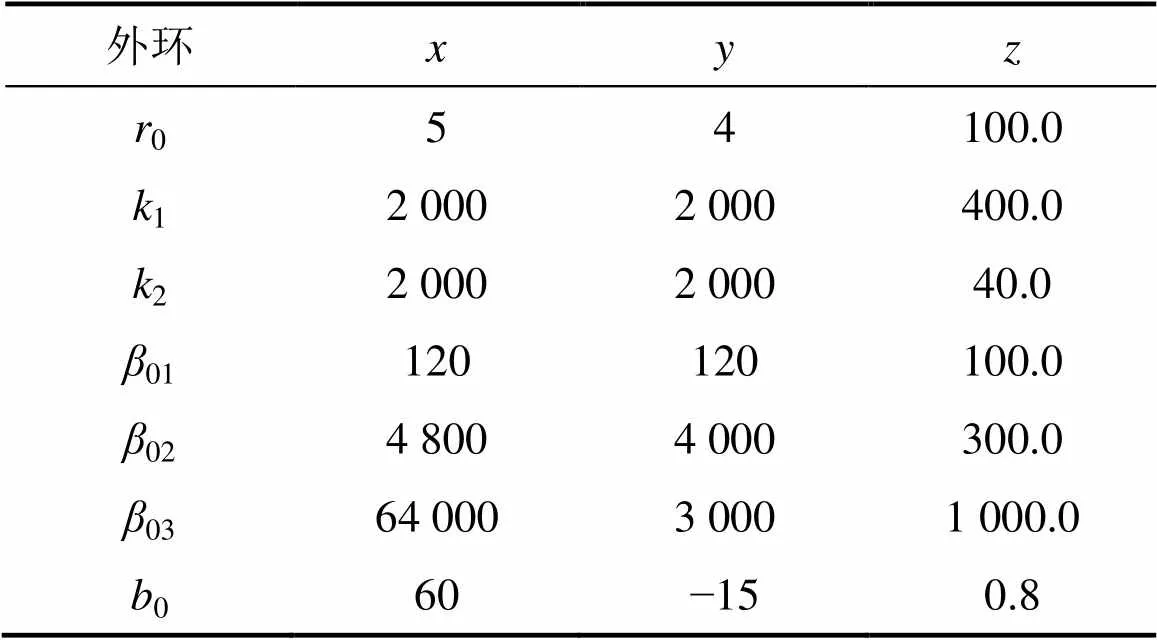
表2 四旋翼無人機(jī)的外環(huán)仿真參數(shù)
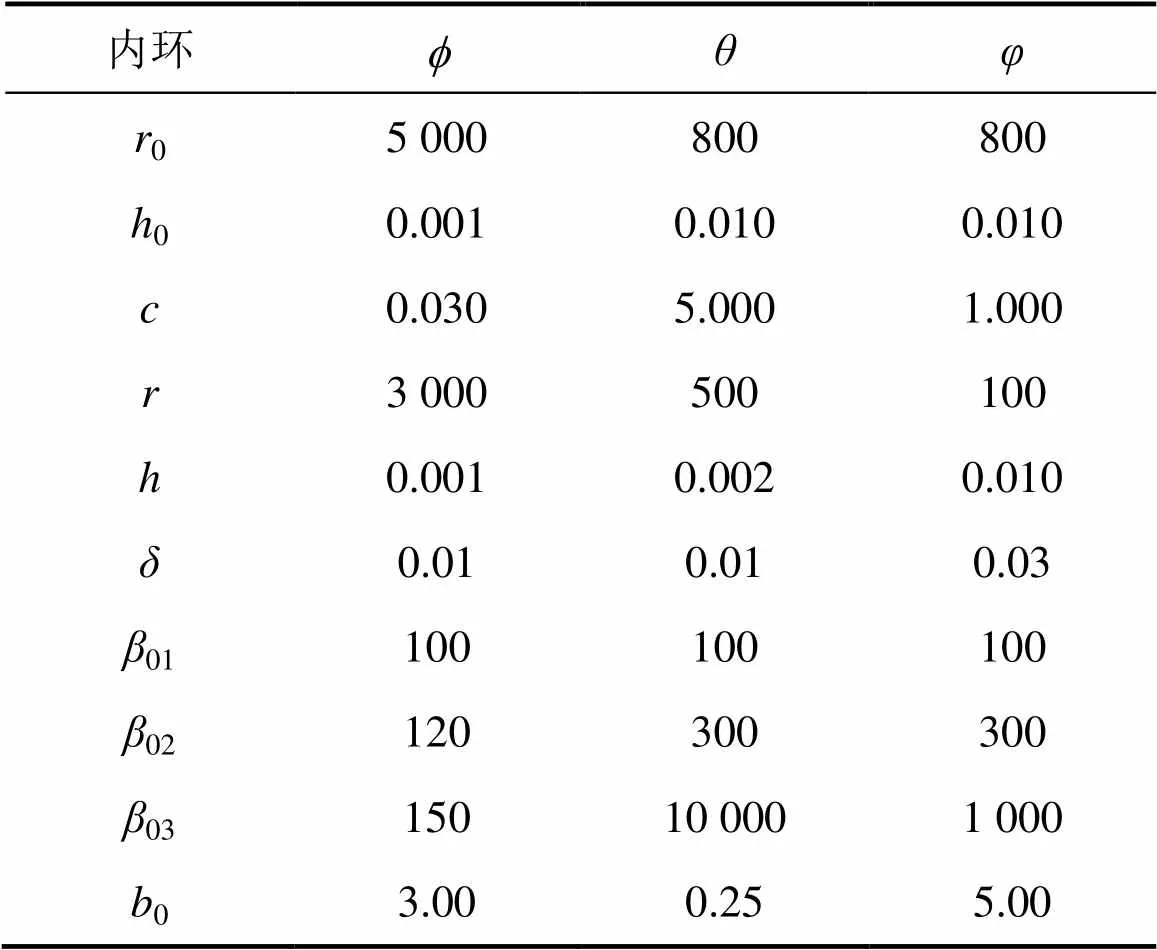
表3 四旋翼無人機(jī)的內(nèi)環(huán)仿真參數(shù)
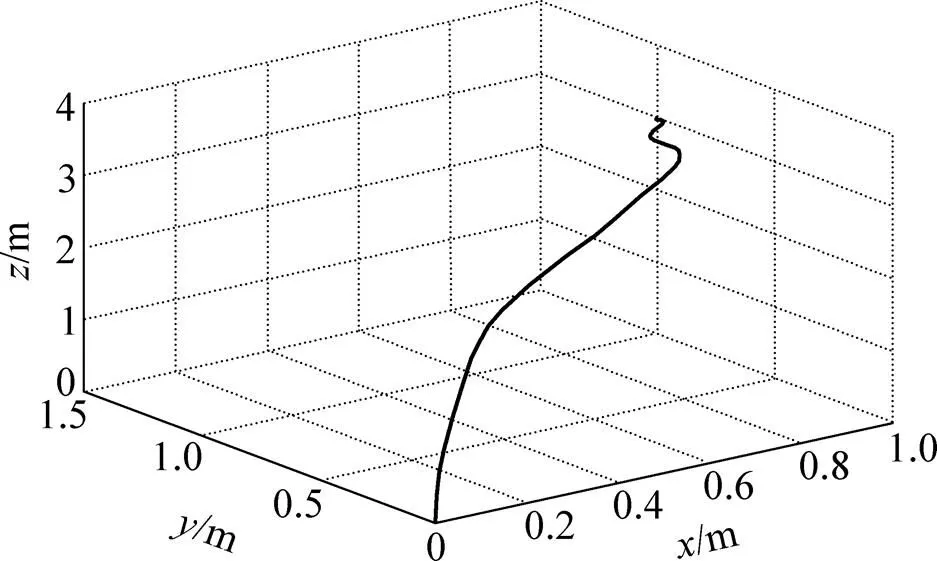
圖4 四旋翼飛行器的飛行軌跡曲線
因此,為獲取較好內(nèi)環(huán)輸入的跟蹤信號(即外環(huán)ADRC輸出的控制信號),外環(huán)的ADRC控制器為線性ARDC控制器,TD、狀態(tài)誤差反饋控制律、ESO均為線性。而為獲取更好的跟蹤效果,內(nèi)環(huán)(姿態(tài)環(huán))采用非線性ADRC控制器,TD、狀態(tài)誤差反饋控制律、ESO均為非線性。
圖5所示為串級ADRC控制器外環(huán)跟蹤曲線。實(shí)線為目標(biāo)位置,虛線為跟蹤軌跡,,和3個軸向均可在1.5 s內(nèi)跟蹤上給定信號。
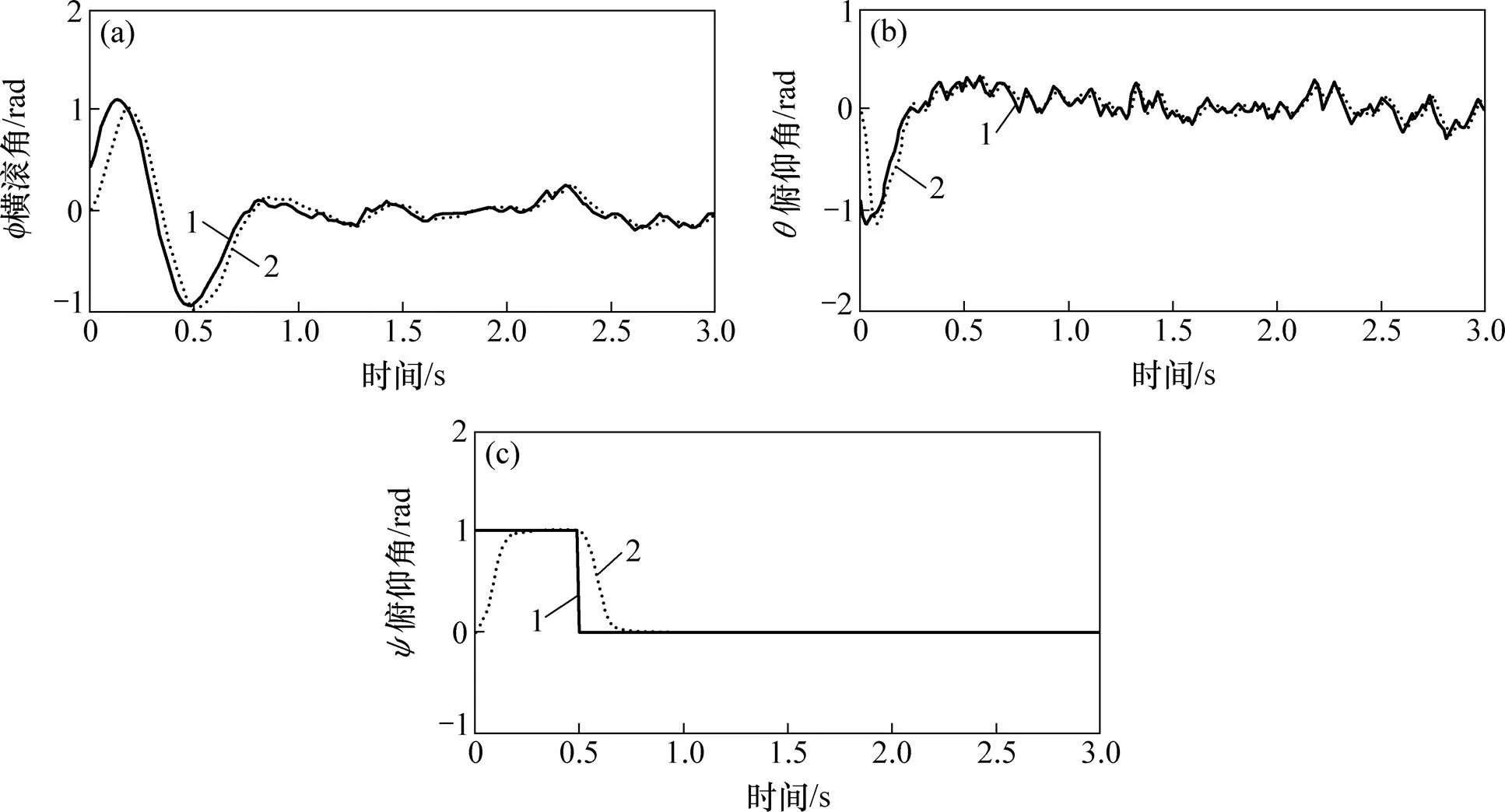
圖6所示為串級ADRC控制器內(nèi)環(huán)跟蹤曲線。實(shí)線為外環(huán)ADRC控制器輸出的控制量即為內(nèi)環(huán)的輸入量,虛線內(nèi)環(huán)的跟蹤曲線。可見非線性ARDC控制具有很好的軌跡跟蹤能力,偏航角為偏航鎖定,可見ADRC控制器具有良好的四旋翼偏航鎖定性能。基于串級ARDC的四旋翼飛行器懸停控制器優(yōu)點(diǎn)不僅在于對系統(tǒng)模型的要求低,控制精度高,更重要的是其對擾動的抑制能力。圖7~9所示為加入高頻白噪聲之后,串級ADRC和串級PID的控制效果對比。
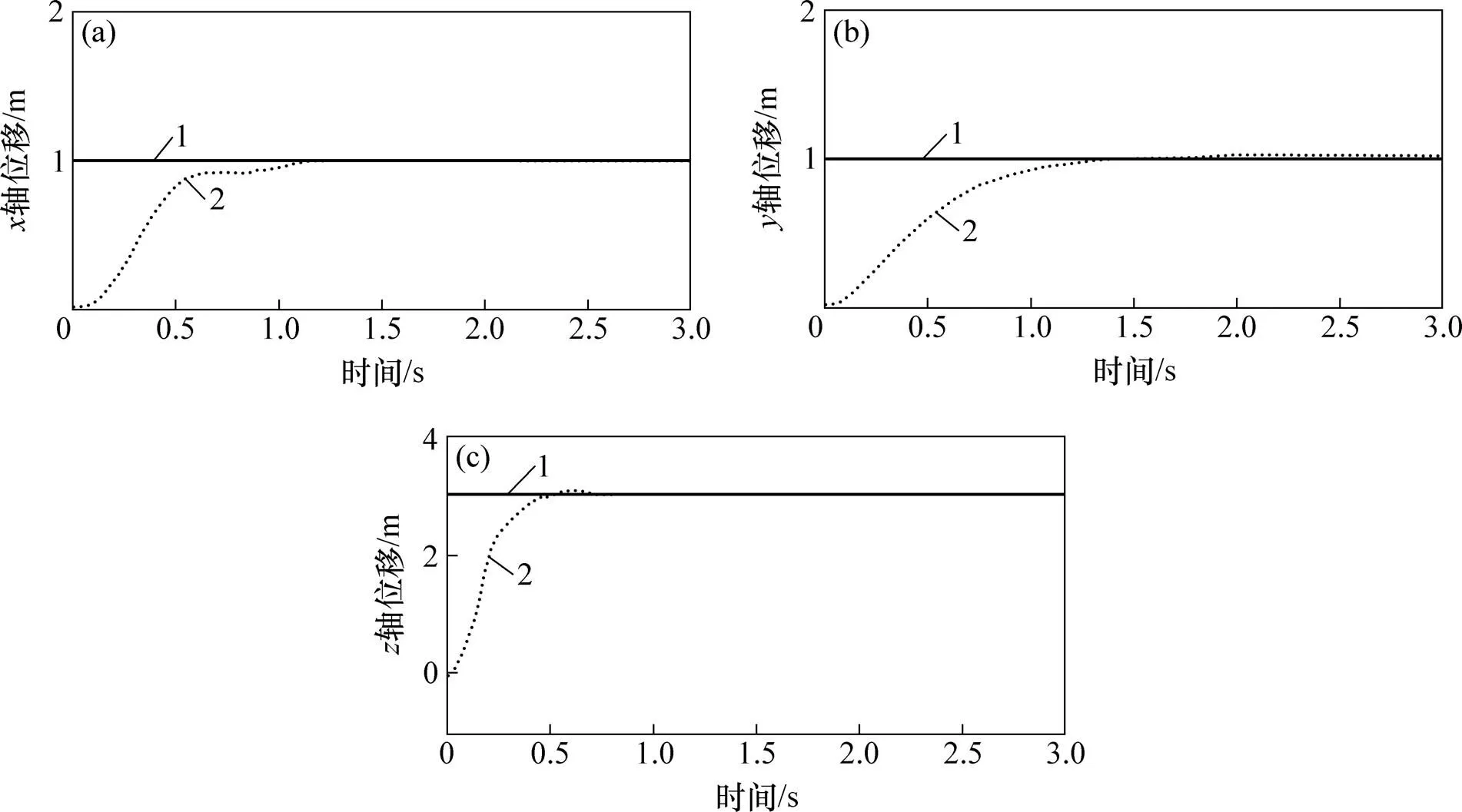
(a) x軸位移?時(shí)間曲線;(b) y軸位移?時(shí)間曲線;(c) c軸位移?時(shí)間曲線
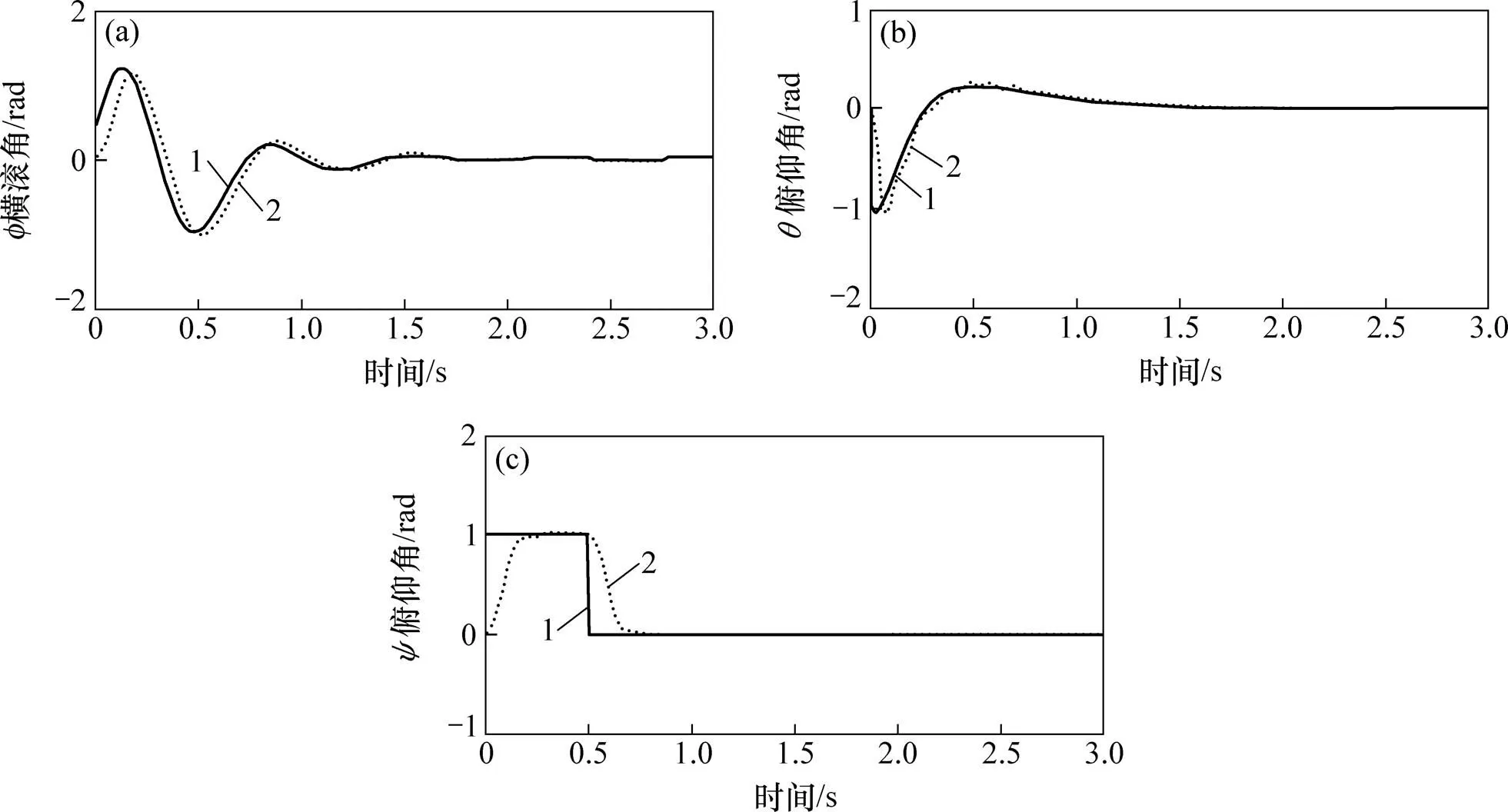
(a) f橫滾角?時(shí)間曲線;(b) θ俯仰角?時(shí)間曲線;(c) ψ俯仰角?時(shí)間曲線
圖7所示為有噪聲輸入控制器外環(huán)跟蹤曲線對比。由圖7可見:加入高頻的白噪聲后,ADRC控制的控制效果比PID的控制效果更好,在1.5 s內(nèi)到達(dá)穩(wěn)態(tài),調(diào)節(jié)時(shí)間短且超調(diào)量小。而PID控制器在高頻噪聲的干擾下,調(diào)節(jié)時(shí)間變長,出現(xiàn)了穩(wěn)態(tài)誤差。并與圖5相比可得有無高頻噪聲情況下,串級ADRC的跟蹤曲線一致,可見ADRC中的擴(kuò)張狀態(tài)觀測器可以很好地對擾動進(jìn)行估計(jì),并利用非線性誤差反饋控制率進(jìn)行補(bǔ)償,消除了高頻噪聲擾動的影響。由圖8和圖9可得:在調(diào)節(jié)時(shí)間一致的情況下,外環(huán)ADRC控制器輸出的控制量比PID控制器輸出的控制量變化更緩和,非線性ADRC內(nèi)環(huán)跟蹤器的跟蹤速度更快,誤差更小。由此可見,本文所提串級ADRC算法比反步法和嵌套飽和法對模型的要求更低,而對擾動的抑制能力比串級PID算法的強(qiáng),控制精度又比串級PID算法的高。
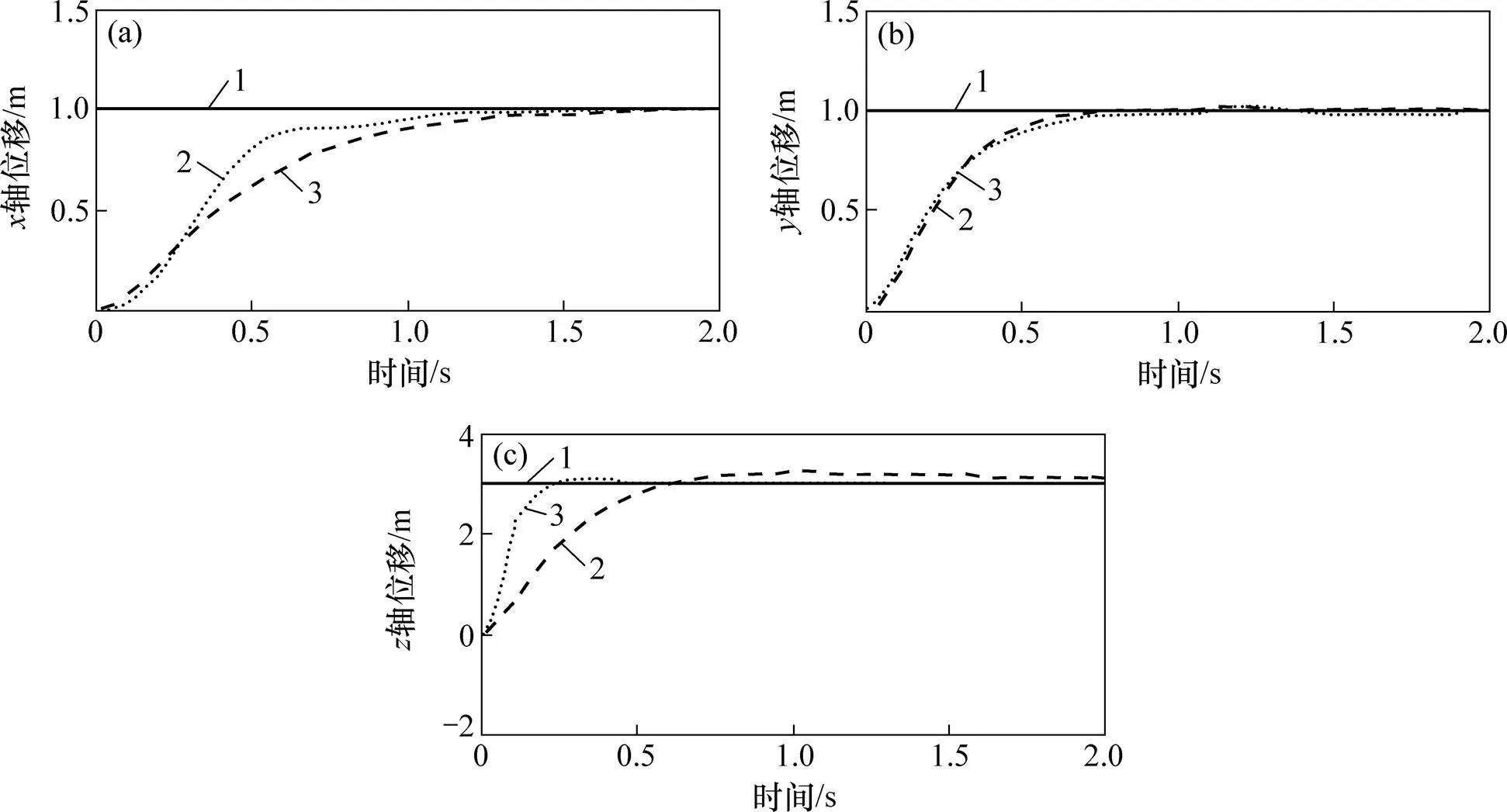
(a) x軸位移?時(shí)間曲線;(b) y軸位移?時(shí)間曲線;(c) z軸位移?時(shí)間曲線
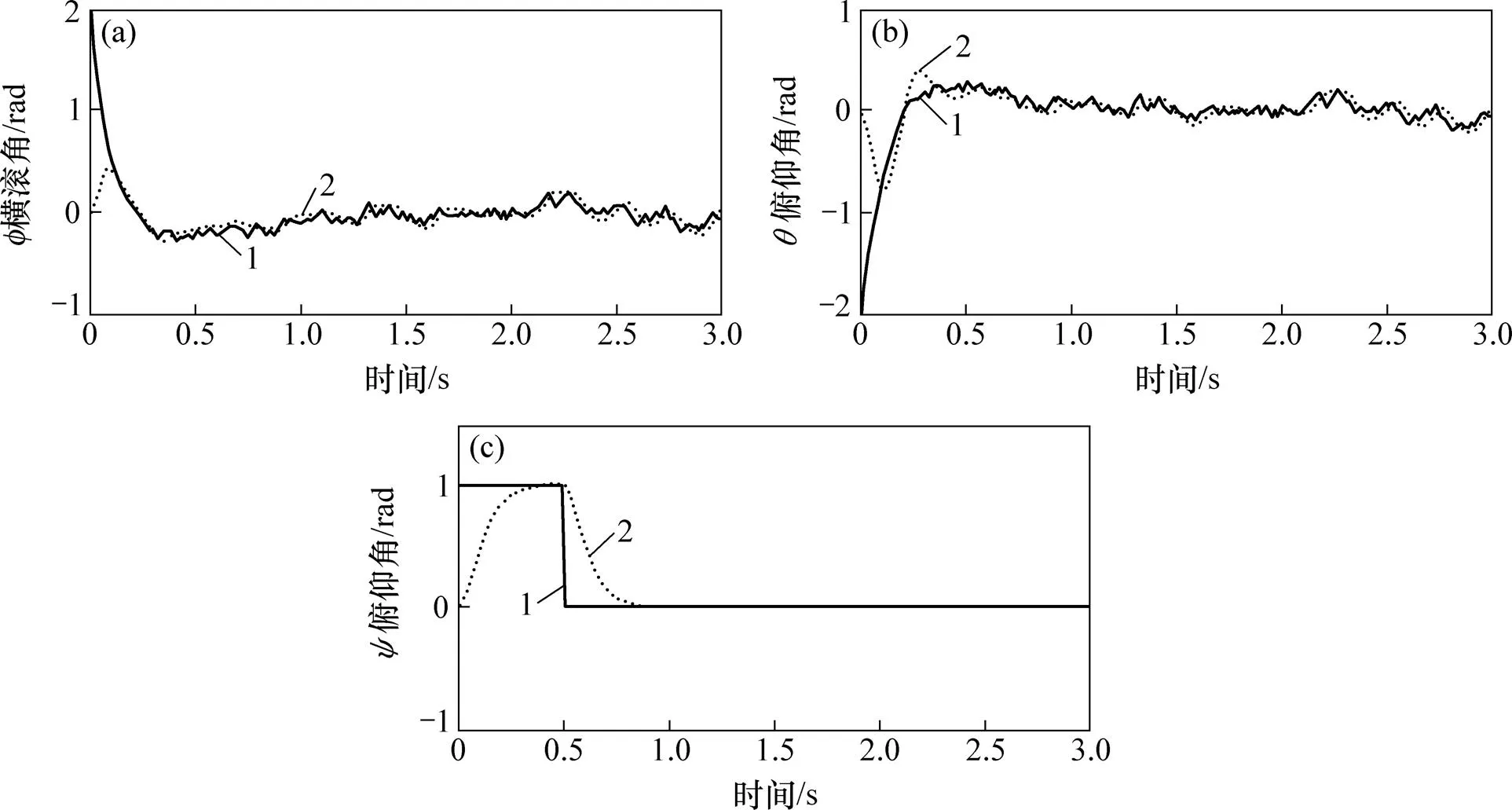
(a) f橫滾角?時(shí)間曲線;(b) θ俯仰角?時(shí)間曲線;(c) ψ俯仰角?時(shí)間曲線
1—目標(biāo)位置;2—跟蹤曲線。
4 結(jié)論
1) 針對一類具有多輸入多輸出強(qiáng)耦合的不確定非線性四旋翼飛行器控制系統(tǒng),提出了一種串級自抗擾控制方法。將系統(tǒng)解耦為雙回路、多子系統(tǒng)的結(jié)構(gòu),針對所控制需求不同,對外環(huán)設(shè)計(jì)線性ADRC控制器,內(nèi)環(huán)設(shè)計(jì)非線性ADRC控制,內(nèi)外環(huán)均引入擴(kuò)張狀態(tài)觀測器對系統(tǒng)的狀態(tài)和內(nèi)外擾動進(jìn)行實(shí)時(shí)估計(jì),并利用非線性反饋控制律進(jìn)行補(bǔ)償,消除內(nèi)外擾動的影響。
2) 所設(shè)計(jì)的串級自抗擾控制器在系統(tǒng)存在不確定和內(nèi)外擾動的情況下,仍能夠?qū)崿F(xiàn)四旋翼飛行器的懸停控制,且具有良好的性能指標(biāo)和魯棒性。
[1] PHANG S K, CAI C, CHEN B M, et al. Design and mathematical modeling of a 4-standard-propeller (4sp) quadrotor[C]//2012 10th World Congress on Intelligent Control and Automation. Beijing: IEEE, 2012: 3270?3275.
[2] ABDESSAMEUD A, TAYEBI A. Global trajectory tracking control of VTOL-UAVs without linear velocity measurements[J]. Automatica, 2010, 46(6): 1053?1059.
[3] DYDEK Z T, ANNASWAMY A M, LAVRETSKY E. Adaptive control of quadrotor UAVs: a design trade study with flight evaluations[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1400?1406.
[4] 曾小勇, 彭輝, 吳軍. 四旋翼飛行器的建模與姿態(tài)控制[J]. 中南大學(xué)學(xué)報(bào)(自然科學(xué)版), 2013, 44(9): 3693?3700. ZENG Xiaoyong, PENG Hui, WU Jun. Modeling and attitude control for a quad-rotor aircraft[J]. Journal of Central South University (Science and Technology), 2013, 44(9): 3693?3700.
[5] GRZONKA S, GRISETTI G, BURGARD W. A fully autonomous indoor quadrotor[J]. IEEE Transactions on Robotics, 2012, 28(1): 90?100.
[6] MAHONY R, KUMAR V, CORKE P. Multirotor aerial vehicles: modeling, estimation, and control of quadrotor[J]. IEEE Robotics & Automation Magazine, 2012, 19(3): 20?32.
[7] RYLL M, BULTHOFF H H, GIORDANO P R. Modeling and control of a quadrotor UAV with tilting propellers[C]//2012 IEEE International Conference on Robotics and Automation. Saint Paul: IEEE, 2012: 4606?4613.
[8] TANVEER M H, AHMED S F, HAZRY D, et al. Stabilized controller design for attitude and altitude controlling of quad-rotor under disturbance and noisy conditions[J]. American Journal of Applied Sciences, 2013, 10(8): 819?831.
[9] KUSHLEYEV A, MELLINGER D, POWERS C, et al. Towards a swarm of agile micro quadrotors[J]. Autonomous Robots, 2013, 35(4): 287?300.
[10] NICOL C, MACNAB C J B. RAMIREZ-SERRANO. Robust adaptive control of a quadrotor helicopter[J]. Mechatronics, 2011, 21(6): 927?938.
[11] RYAN T, KIM H J. LMI-based gain synthesis for simple robust quadrotor control[J]. IEEE Transactions on Automation Science and Engineering, 2013, 10(4): 1173?1178.
[12] 李一波, 宋述錫. 基于模糊自整定PID四旋翼無人機(jī)懸停控制[J]. 控制工程, 2013, 20(5): 910?914. LI Yibo, SONG Shuxi. Hovering control for quadrotor unmanned helicopter based on fuzzy self-tuning PID algorithm[J]. Control Engineering of China, 2013, 20(5): 910?914.
[13] AZINHEIRA J R, MOUTINHO A. Hover control of an UAV with backstepping design including input saturations[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 517?526.
[14] ZAMUDIO Z, LOZANO R, TORRES J, et al. Vision based stabilization of a quadrotor using nested saturation control approach[C]//2011 15th International Conference on System Theory, Control, and Computing. Sinaia: IEEE, 2011: 1?6.
[15] 李俊, 李運(yùn)堂. 四旋翼飛行器的動力學(xué)建模及PID控制[J]. 遼寧工程技術(shù)大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 31(1): 114?117. LI Jun, LI Yuntang. Modeling and PID control for a quadrotor[J]. Journal of Liaoning Technical University (Natural Science), 2012, 31(1): 114?117.
[16] 吳成富, 劉小齊, 馬松輝. 四旋翼無人機(jī)建模及其四元數(shù)控制律設(shè)計(jì)[J]. 飛行力學(xué), 2013, 31(2): 122?125. WU Chengfu, LIU Xiaoqi, MA Songhui. Modeling and control for a quadrotor UAV based on quaternion[J]. Flight Dynamics, 2013, 31(2): 122?125.
[17] 韓志鳳, 李榮冰, 劉建業(yè), 等. 小型四旋翼飛行器動力學(xué)模型優(yōu)化[J]. 控制工程, 2013, 20(增刊): 158?162. HAN Zhifeng, LI Rongbing, LIU Jianye, et al. Model optimization of small quad-rotor in the case of center of mass offset[J]. Control Engineering of China, 2013, 20(Suppl): 158?162.
[18] 陳航科, 張東升, 盛曉超, 等. 四旋翼飛行器懸停狀態(tài)姿態(tài)控制建模與仿真[J]. 計(jì)算機(jī)仿真, 2013, 30(11): 41?45. CHEN Hangke, ZHANG Dongsheng, SHENG Xiaochao, et al. Modeling and attitude control simulation for four-rotor aircraft in hover[J]. Computer Simulation, 2013, 30(11): 41?45.
[19] 韓京清. 自抗擾控制技術(shù)?估計(jì)補(bǔ)償不確定因數(shù)[M]. 北京: 國防工業(yè)出版社, 2008: 212?238. HAN Jingqing. Active disturbance rejection control technique-the technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 212?238.
[20] 張益鵬. 四旋翼無人機(jī)自適應(yīng)控制與故障容錯[D]. 南京: 南京郵電大學(xué), 2014: 37?45. ZHANG Yipeng. Adaptive control and fault tolerant of quadrotor unmanned aerial vehicles[M]. Nanjing: Nanjing University of Posts and Telecommunications, 2014: 37?45.
(編輯 陳愛華)
Cascade ADRC-based hover control for quadrotor air vehicles
YE Xiaolu, YU Li, ZHANG Wenan, ZHANG Dan
(College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China)
A cascade active disturbance rejection controller was designed for the hover control of a quadrotor air vehicle. First, a dynamic model of a quadrotor air vehicle was presented by applying the Euler and Newton theorem, where the model was further decoupled as a double loops and multi-subsystems structure. Then, a cascade active disturbance rejection controller (ADRC) was designed by taking the structural features of quadrotor air vehicle systems into consideration. A linear ADRC controller was designed for the external-loop to obtain a better loop input signal and a nonlinear ARDC controller was deisgned for the inner-loop to obtain better tracking performance. For the parameter perturbations within the system and the influence of the existing uncertainties of external disturbances, an extended state observer was designed for estimating the state and the sum of internal and external disturbance of the system, and the nonlinear state error feedback control law was used upon this to compensate the disturbance and eliminate the influence of internal and external disturbance on the system. Finally, simulations were presented to verify the effectiveness and superiority of the proposed control method.
quadrotor air vehicle; cascade active disturbance rejection controller (ADRC); extended state observer; hover control
10.11817/j.issn.1672?7207.2017.08.015
TP319;V249.1
A
1672?7207(2017)08?2079?09
2016?09?18;
2016?12?22
國家自然科學(xué)基金資助項(xiàng)目(61273117,61673351);浙江省自然科學(xué)基金重點(diǎn)資助項(xiàng)目(2014R403087)(Projects(61273117, 61673351) supported by the National Natural Science Foundation of China; Project(2014R403087) supported by Zhejiang Provincial Natural Science Foundation of China)
俞立,博士,教授,從事網(wǎng)絡(luò)化控制、機(jī)器人控制的研究;E-mail:lyu@zjut.edu.cn
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04