四軸機械臂控制系統的空間定位
2017-11-07 12:52:32卿鐘軍許渝東莫汝友陳楊順袁旭東
電子技術與軟件工程 2017年17期
關鍵詞:機械
文/卿鐘軍 許渝東 莫汝友 陳楊順 袁旭東
四軸機械臂控制系統的空間定位
文/卿鐘軍 許渝東 莫汝友 陳楊順 袁旭東
本文中主要介紹機械的空間位置定位,知道空間的一個確定的坐標點計算出機械臂各個臂的角度。
機械臂 軌跡規劃 定點定位
作為一種重要的自動化裝置,機械手廣泛用于機械加工行業,主要進行搬運、切割、裝配、噴漆、鍛造等工作,能夠提高生產效率、節約勞動成本。隨著生產力的高度發展,對機械臂運動的精度和路徑有了更高的要求。如何提高機械臂的工作效率并有效準確的達到生產要求位置成為機械臂需要解決的關鍵性問題。因此對機械臂軌跡規劃和定點定位的研究是解決問題的前提和基礎。
1 機械臂的位姿描述
機械臂的運動離不開機器人的運動學,機械臂運動學問題主要是通過坐標變換來解決機械臂的關節變量和機械臂位置與姿勢的關系。機械臂運動的過程是非常復雜的,直接對其分析和研究會非常困難。為了表示機械臂的本體結構、各個連桿以及工作坐標系在工作空間的運動,我們將把機械臂連桿理想化為剛體,然后根據機械臂的位置及姿態的變化描述在工作空間中的運動。機器臂一般由多個轉動后移動的關節和連桿組成,其執行器的位姿就是機械臂各個連桿和關節在空間中的位置和姿態。
對于剛體位姿的描述方法有很多種,我們采用了齊次變換法,該方法可以很好的將運動、變換和映射與矩陣運算有機地結合起來,通過矩陣操作顯示位姿變化。如圖1所示。
對于空間坐標{A}中的任意一個點P,它的位置都可以使用一個3*1的列向量AP=[PxPyPz]T表示。其中,Px,Py,Pz分別代表點P在坐標系{A}中的三個坐標軸XA,YA,ZA方向上的投影分量。
2 機械手的數學模型與各舵機角度值的計算
圖2中,θ0、θ1、θ2分別表示0號、1號和2號舵機的角度,a0至a3代表的長度可以通過測量得知,為已知量,A、B、C、D、E是為計算而標定的點,圖中虛線都是為計算方便做的輔助線。圖中(X,Y,Z)代表要定位點的坐標值,移動到該點表示機械手手掌前端移動到該點。且已由機械結構知BF⊥FC
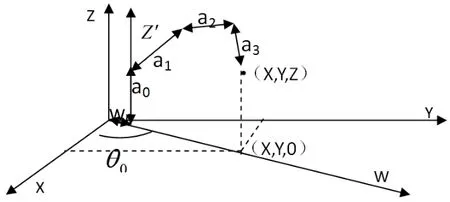
圖2:空間直角坐標系中的機械手模型
由 圖 2可 知 ∠θ0=tanh-1∠(Y/X),W=√(X2+Y2)。當(X,Y,Z)坐標值確定時,∠θ0被唯一確定,且由∠θ0可以唯一確定一個Z'—W平面。為計算簡便,把Z軸沿W正向挪動W0距離,在Z—W平面進行計算,則坐標值Z'=Z,為書寫方便,令W'=W-W0,并記W'=W。
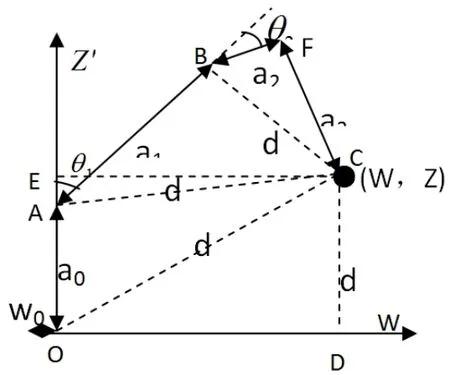
圖3“Z^'—W平面
圖3畫出了機械手在Z'—W平面上的情況,因為CD⊥OD,則d0=Z,所以

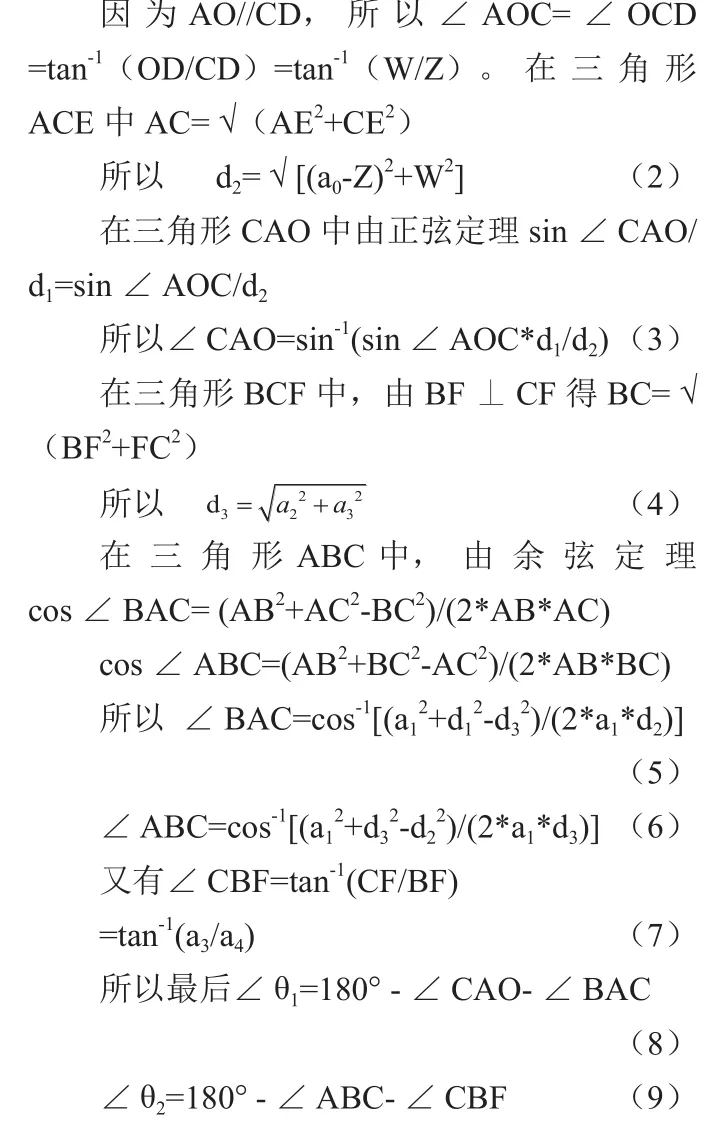
把式(1)、(2)、(4)分別帶入(3)、(5)和(6)中,再把式(3)、(5)帶入式(8)中,把式(6)、(7)帶入式(9)中即可求得最后結果。寫程序時,只需一步步求出各個變量即可,求出帶入后的最終式是沒有什么意義的。
3 結束語
本設計通過設計一個四軸機械臂并對其的空間點的位置進行研究和分析,其中的多軸聯動控制算法最為關鍵,實現簡單、運算速度快、準確度高等功能,對于工業中的高精度有很強的適用性。設計中,通過機械臂的數學模型,對其空間中的點進行計算,求出機械臂中各個關節的具體角度。在現實模型中我們的機械臂關節用舵機實現,可以根據求出角度算出舵機應給的占空比,這樣機械臂就可以達到空間中的坐標點,實現定點點位。
[1]張志鵬.基于PLC軟件的教學用自動物料分檢系統的設計與實現[D].電子科技大學,2011.
[2]黃沛鑫.多種環境下仿人機器人二足步行方法研究[D].華南理工大學,2011.
[3]丁旭.基于OpenGL的工業機器人可視化仿真[D].河北大學,2011.
作者單位桂林電子科技大學電子工程與自動化學院廣西壯族自治區桂林市 541004
本論文是2016年廣西區級大學生創新創業訓練項目的階段性研究成果,項目編號:201510595025。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
