基于膜式液壓放大的壓電驅動器設計與試驗
2017-11-15 02:32:50王建紅許有熊
中國機械工程 2017年21期
王建紅 周 浩 許有熊 劉 娣
1.南京工程學院自動化學院,南京,2111672.南京工程學院機械工程學院,南京,211167
基于膜式液壓放大的壓電驅動器設計與試驗
王建紅1周 浩2許有熊1劉 娣1
1.南京工程學院自動化學院,南京,2111672.南京工程學院機械工程學院,南京,211167
為解決疊堆式壓電陶瓷輸出位移微小的問題,結合液壓放大的優點,提出了一種基于膜式液壓放大的壓電驅動器,并對關鍵部件——橡膠膜片進行有限元靜力學、模態等分析。分析結果表明:橡膠膜片具有足夠的安全強度和良好的工作頻寬。在此基礎上,研制其實物樣機,搭建其測控平臺,并進行了試驗研究。開環試驗結果表明:在0~100 V電壓控制下,所研制的壓電驅動器輸出位移范圍為0~0.24 mm,放大比約為5;閉環控制試驗結果表明:采用分段PID的驅動器控制效果優于采用常規PID的控制效果,穩態誤差約為±0.5 μm。
液壓放大;壓電驅動器;分段PID;有限元
0 引言
氣動比例閥是實現氣動系統連續控制的關鍵元件[1],傳統的氣動比例閥采用高速電磁鐵作為電-機械轉換器,存在響應速度慢、控制精度較差等缺點,因而其在工業領域的應用受到限制[2]。壓電驅動器因具有響應速度快、便于控制、工作頻率范圍寬等優點而得到了越來越廣泛的應用,它也成為高速高精度氣動比例閥研制中一種可選用的電-機械轉換器[3]。但是由于壓電驅動器輸出位移微小,一般為幾微米到幾十微米,若直接用來控制閥芯的開度,它所能控制的閥的壓力或流量也非常微小,尚達不到實際的工程應用需求,因此,需對壓電驅動器輸出的微位移進行有效的放大,即需要研究其放大機構,以滿足實用的目的。
目前,壓電驅動器常用的放大機構大多采用基本柔性鉸鏈的杠桿式或三角式的放大機構[4],其運動再現性高、結構簡單,但同時存在承受載荷小、易疲勞損壞等缺點,且為了得到較高的放大比,需要進行多級放大,導致放大機構體積較大,不利于氣動閥小型化的發展要求,這限制了該類壓電驅動器在氣動閥中的應用。
基于液壓傳動的放大機構具有結構緊湊、承載能力大等特點[5],也是壓電驅動器的一種常用放大機構。而活塞式的液壓放大機構也存在易泄漏、易磨損、動態性能差、體積較大等缺點,不適合作為壓電陶瓷微位移的放大機構,因此,本文提出一種基于膜式液壓放大的壓電驅動器,并進行了設計、關鍵部件有限元分析、控制試驗等研究。
1 膜式液壓放大的壓電驅動器設計
1.1工作原理
本文設計的膜式液壓放大的壓電驅動器結構原理如圖1所示,它主要由疊堆式壓電陶瓷、大膜片閥芯、小膜片閥芯、液壓油、復位彈簧、光柵傳感器、輸出軸等組成。其工作原理為:當壓電陶瓷得電后,向上輸出位移推動上膜片閥芯往上移動,從而推動大腔內的液壓油擠向小腔內,以帶動小膜片閥芯往上移動,即輸出軸移動的位移為放大后的壓電陶瓷位移。另外,由于壓電陶瓷本身的遲滯、蠕變等非線性特性,再加上液壓油可壓縮性等影響,嚴重影響輸出軸的輸出位移精度,故輸出軸輸出位移經光柵傳感器測量后形成閉環反饋,以提供位移的輸出精度。當壓電陶瓷斷電時,在復位彈簧的作用下,大、小膜片閥芯跟隨壓電陶瓷回落。

圖1 結構原理圖Fig.1 The structure prinicple diagram
疊堆式壓電陶瓷在有外負載F作用下的壓電方程為[6]
(1)

所用膜片為硬芯波紋膜片,其有效面積可按下式計算[7]
(2)
(3)
式中,A1、A2分別為大、小膜片閥芯的有效面積;d1為小膜片閥芯直徑;d2為小液壓腔直徑;d3為大膜片閥芯直徑;d4為大液壓腔直徑。
根據液壓放大原理,其放大比
k=A1/A2
(4)
所采用的設計尺寸為:d3=50 mm,d4=56 mm,d1=14 mm,d2=20 mm,其理論放大比k約為9.6。
結合式(1)~式(4),可得輸出軸的總輸出位移

(5)
按照圖1所示的結構原理圖,詳細設計了圖2a所示的結構圖,加工后的實物樣機如圖2b所示。

(a)結構圖 (b) 實物樣機圖圖2 結構圖與實物樣機圖Fig.2 The structure diagram and prototype diagram
1.2橡膠膜片有限元分析
放大機構采用橡膠膜片閥芯代替傳統的滑閥閥芯以防止液壓油泄漏,但是該膜片閥芯的移動是利用橡膠材料的變形來實現的,且實際變形較為復雜,很難采用傳統的材料力學理論確定其應力-應變規律。為了檢驗該橡膠膜片具有足夠的拉伸強度以及較好的動態特性和工作頻寬,需采用有限元方法對膜片閥芯進行分析。由于大膜片閥芯的變形小于小膜片閥芯的變形,即小膜片閥芯更易破壞,故只對小膜片閥芯進行有限元分析。
橡膠屬于一種超彈性材料,其本構模型有Mooney-Rivlin模型、Neo-Hooken模型等。本文所用橡膠膜片在工作時,因其變形相對較小(應變小于150%),故采用兩參數的Mooney-Rivlin模型,其表達式為[8]

(6)
式中,W為應變勢能;I1、I2為變形張量;C10、C01為Mooney常數;J為變形后體積與變形前體積之比;d為材料不可壓縮參數。
1.2.1小膜片閥芯有限元模型
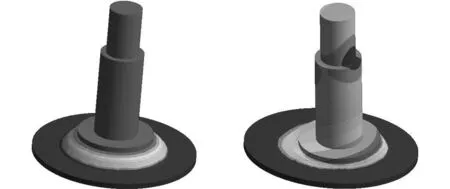
將所設計的小膜片閥芯另存為.x_t的格式,導入ANSYS Workbench中,如圖3所示。其中,小膜片閥芯由底芯、小橡膠膜片、輸出閥芯組成,三者通過螺釘連接而成,小橡膠膜片外圍直徑d2為30 mm,在d5和d2環形之間被壓縮固定在閥體上。在Workbench中,對其進行智能網格劃分,其中,單元大小為0.5 mm,如圖4所示。
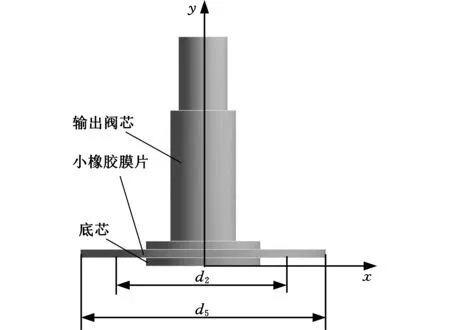
圖3 小膜片閥芯結構圖Fig.3 The small diaphragm spool structure diagram
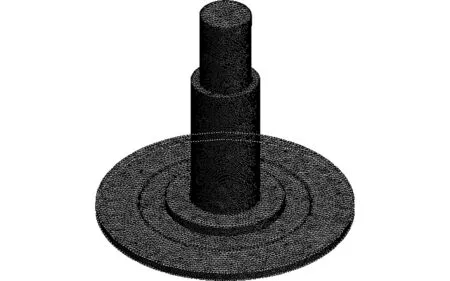
圖4 小膜片閥芯網格圖Fig.4 The small diaphragm spool mesh diagram
在底芯和小橡膠膜片、小橡膠膜片和輸出閥芯之間設置“接觸”;小橡膠膜片的d2與d5之間通過印記設置固定約束。
1.2.2靜力學分析
由于所選用的壓電陶瓷最大輸出位移為60 μm(在1301 V控制電壓下),按液壓放大機構理論放大倍數10來計算,即所設計的壓電驅動器理論最大輸出位移為600 μm,因此,模擬在底芯處施加600 μm的位移載荷,以檢驗橡膠膜片是否有足夠的安全強度,其位移變形和應力如圖5所示。

(a)位移變形圖 (b)應力圖 圖5 小橡膠膜片的位移變形與應力圖Fig.5 The small rubber diaphram displacement deformation and stress diagram
從圖5可以看出,小橡膠膜片的最大應力為0.87 MPa,根據文獻[9],硅橡膠拉伸強度為2~5 MPa(未補強硫化)和4~10 MPa(補強硫化),小橡膠膜片的安全系數最低約2.3,有良好的安全強度。
1.2.3模態分析
采用有限元模態分析確定小膜片閥芯組件的振動模型及其相對應的固有頻率等振動特性,以了解其動態特性。在上述靜力學分析的基礎上,得到小膜片閥芯組件前4階的模態振型,如圖6所示,相對應的固有頻率見表1。
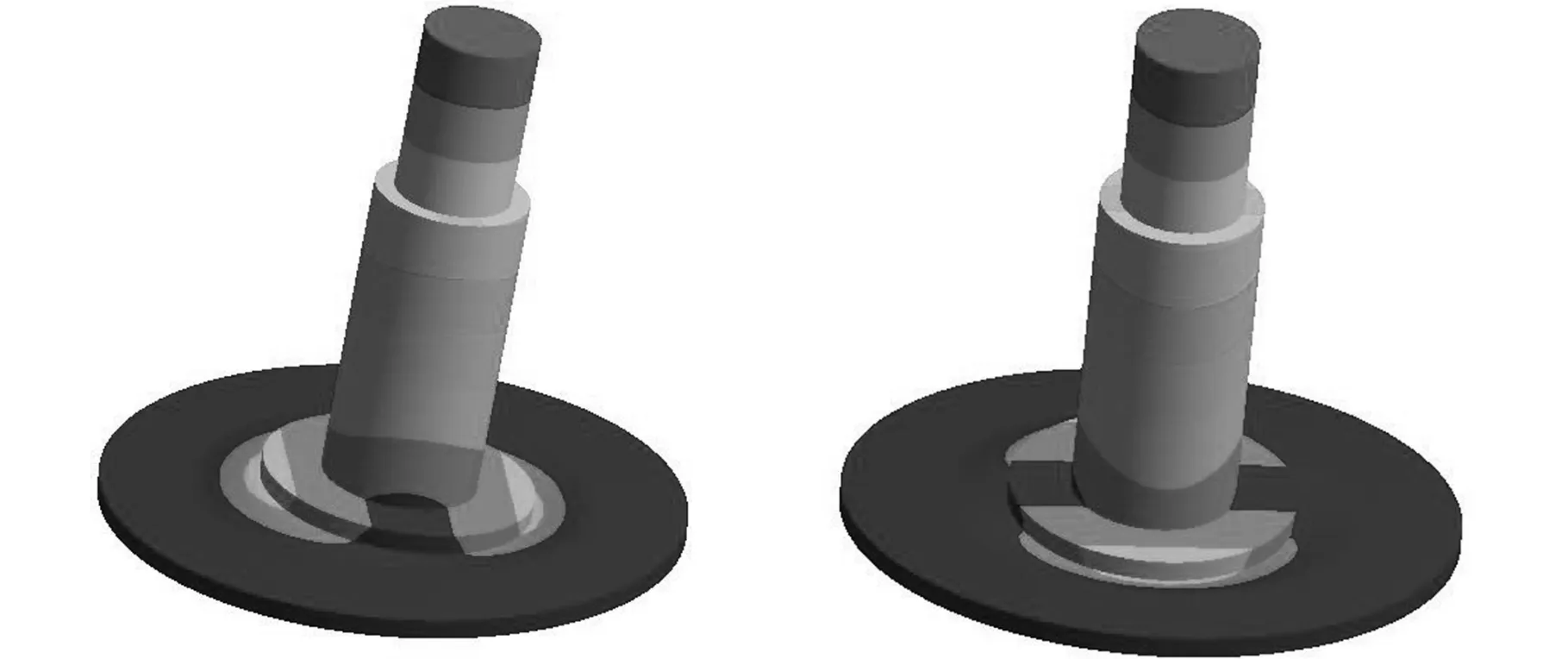
(a)1階模態 (b)2階模態
(c)3階模態 (d)4階模態圖6 小膜片閥芯模態圖Fig.6 The small diaphragm spool mode diagram

階數固有頻率(Hz)振型說明第1階139.30沿x軸振動第2階139.88沿z軸振動第3階307.86沿y軸振動第4階1152.10繞z軸轉動
從表1可以看出,小膜片閥芯在工作位移方向(即沿y軸移動)的固有頻率為307.86 Hz,有良好的工作頻寬。
2 試驗
2.1試驗平臺的搭建
在研制壓電驅動器實物樣機的基礎上,采用NI測控系統搭建其試驗平臺,其原理如圖7所示。其中,采用NI CRIO9024作為實時控制器,以保證試驗平臺的實時性。其試驗系統如圖8所示。
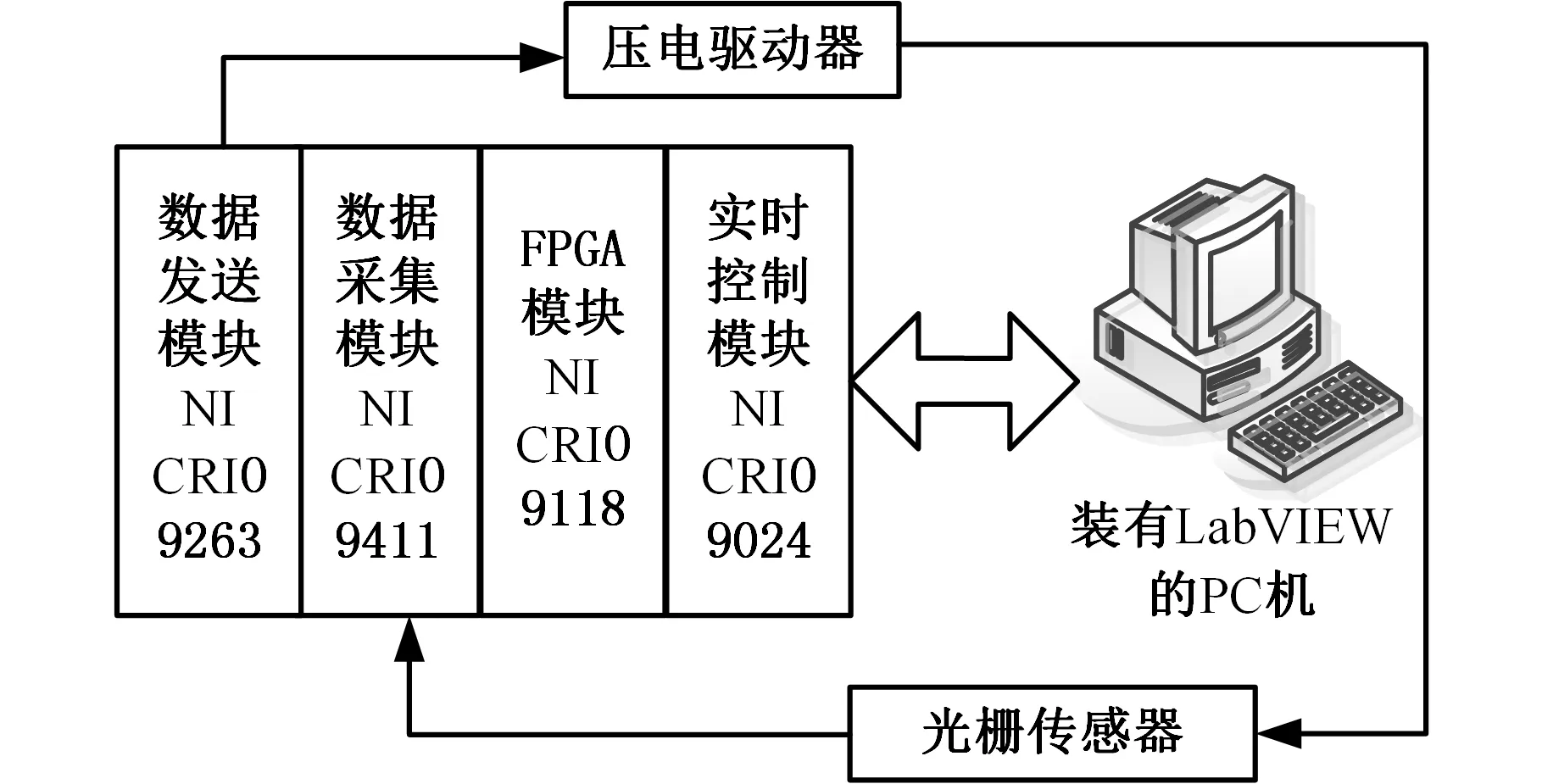
圖7 試驗平臺硬件原理圖Fig.7 The hardware schematic diagram of test platform
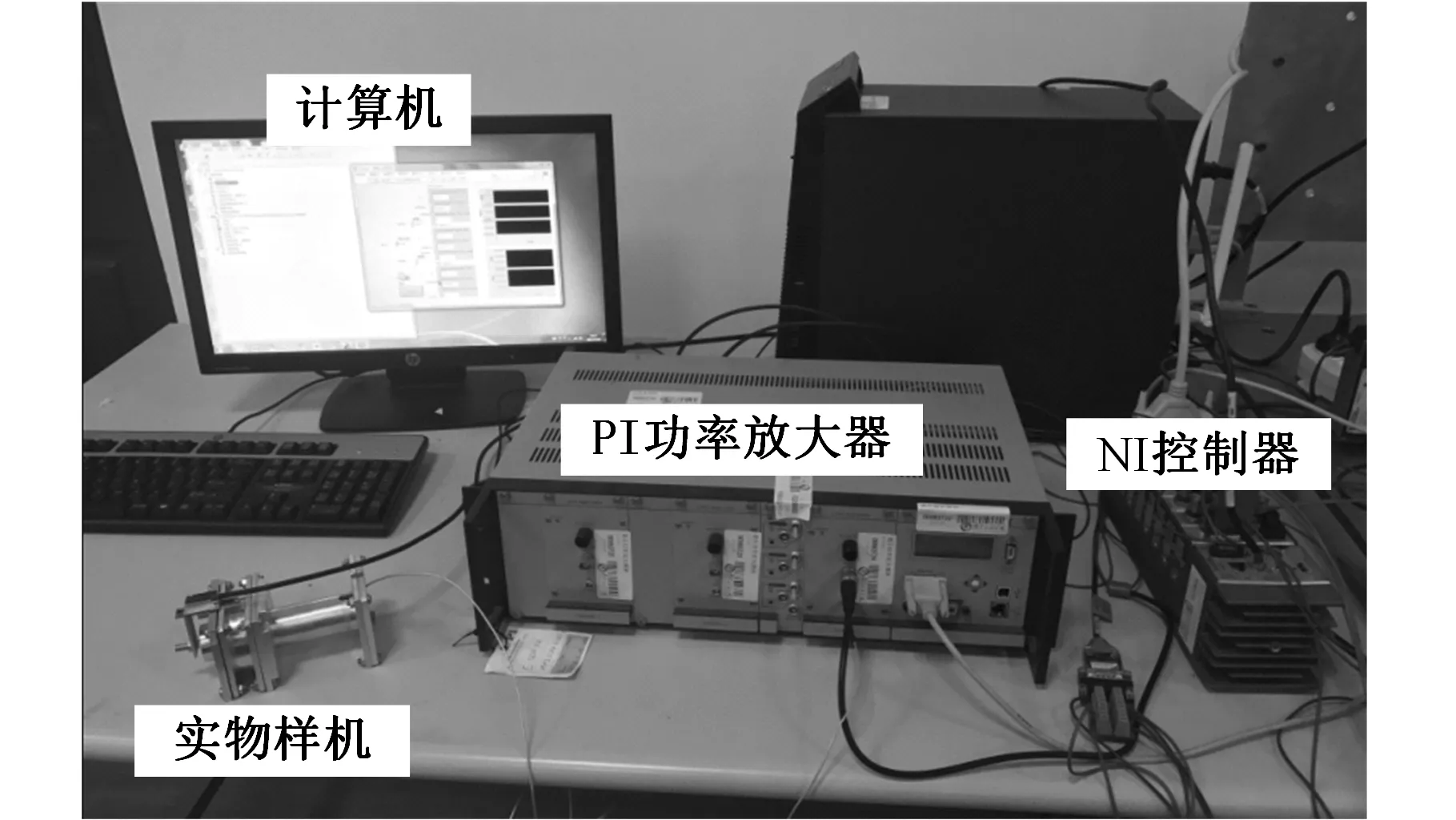
圖8 試驗系統Fig.8 The test system
2.2開環試驗
控制電壓從0開始以間隔10 V依次升高到100 V,再以間隔-10 V依次減小到0,分別檢測壓電陶瓷輸出位移以及經液壓放大后的驅動器末端輸出位移,如圖9所示。從圖9可以看出:末端輸出位移有較大的遲滯環,這是由于壓電陶瓷本身的遲滯、蠕變,再加上液壓本身的非線性等原因造成的,需要對其進行閉環控制研究加以消除;在100 V電壓下,末端輸出位移約0.241 mm,壓電陶瓷輸出位移約0.048 mm,放大比約為5,這與上述理論分析的近似放大比9.6有較大差距,原因如下:一方面,理論計算的放大比本身是一種近似計算,不能反映真實的放大比;另一方面,由于液壓油的微量泄漏、空穴、壓縮性等因素,再加上橡膠膜片的變形所造成的位移損失會導致放大比的降低,但是該位移值也已滿足所研究壓電閥的行程要求。
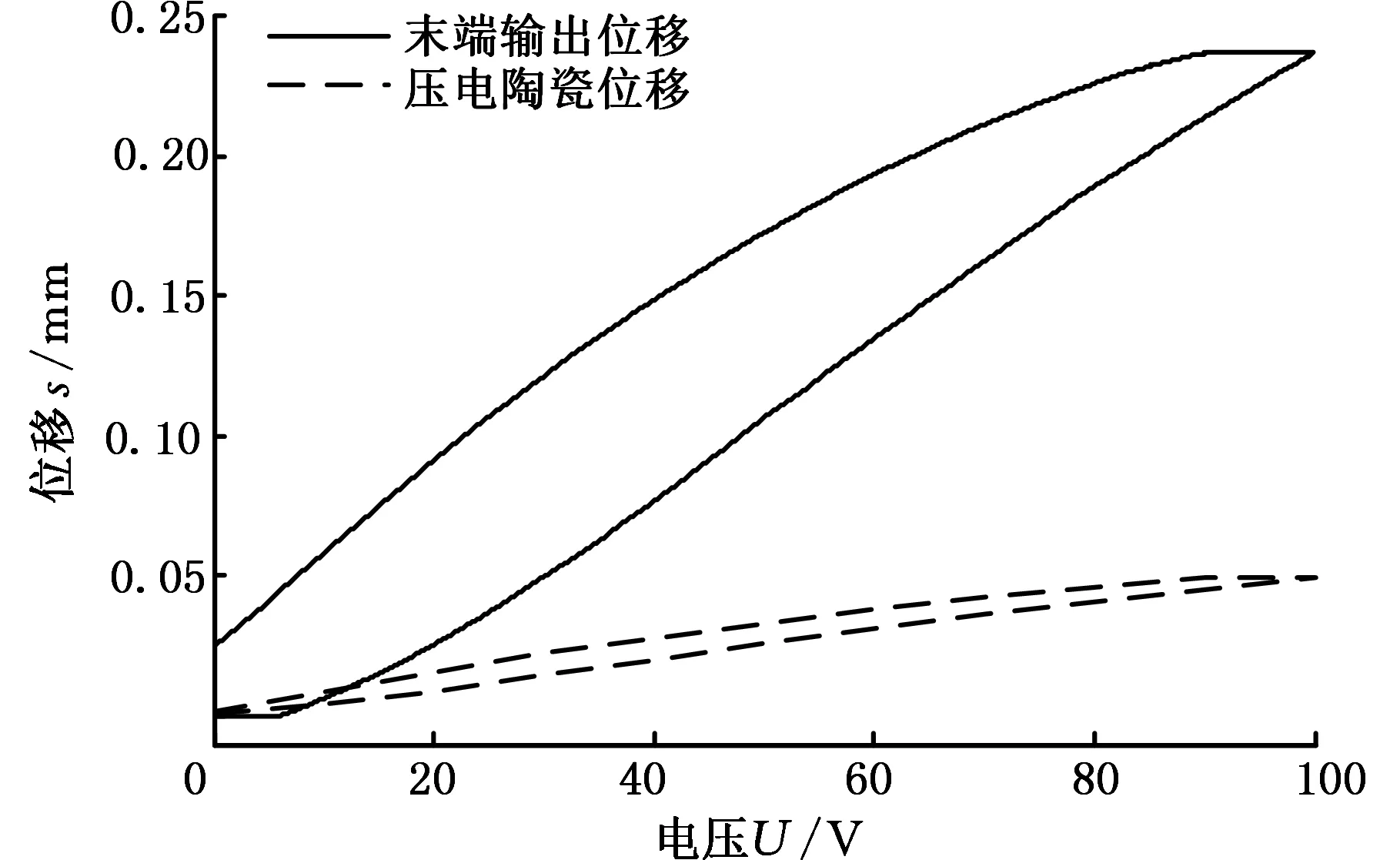
圖9 位移-電壓圖Fig.9 The displacement-voltage diagram
在不同輸入電壓下,驅動器末端輸出位移的動態響應過程如圖10所示。從圖10可以看出,末端輸出位移有一定蠕變,需進行閉環控制以消除或降低影響。
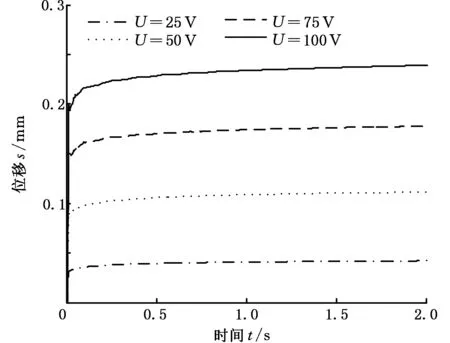
圖10 開環動態響應圖Fig.10 The open loop dynamic response diagram
2.3控制試驗
以所研制的壓電驅動器末端輸出位移作為閉環反饋控制。若采用常規的PID控制器,在壓電遲滯、蠕變、液壓油壓縮性等因素的影響下,存在魯棒性差、無法保證位置控制精度等缺點[10-11],而模糊PID控制既具有PID控制的優點,又具有模糊控制適應性強的優點,它利用模糊規則在線推理出PID控制的3個參數,以消除壓電遲滯、蠕變、液壓油壓縮性等對控制精度的影響,但是在線模糊推理會延長硬件系統的計算時間,從而影響控制系統的采樣頻率和實時性,達不到理想中的控制效果。結合模糊控制和PID控制的思想,采用分段PID控制方法,具體規則如下。
(1)當誤差|e|較大時,比例調節系數KP應取較大值;微分調節系數KD應取較小值;積分調節系數KI也應取較小值,甚至等于0,以加快系統響應過程且避免過大超調。
(2)當|e|適中時,KP應取較小值,KI和KD取值適中,以避免系統產生較大值的超調以及在設定值附近產生振蕩。
(3)當|e|較小時,KP應取較大值,KI應取較小值,KD取值適中,以使系統具有較好的穩態性,且避免在設定值附近產生振蕩。
按常規PID控制參數整定放大得到KP1、KP2、KP3,KI1、KI2、KI3,KD1、KD2、KD3,并設置兩個誤差閾值e1和e2,其算法如下:
在圖8所示的控制參數、設定值為0.15 mm條件下,分別對其進行分段PID控制和常規PID控制試驗,如圖11所示。從圖11可以看出:采用常規PID控制具有一定的超調,約3.8 μm,其響應時間約0.047 s(達到設定值的90%,下同);而采用分段PID控制,能大大降低超調量(降至1 μm),且響應時間約0.036 s,兩者的穩態誤差均約為±0.5 μm。這說明采用分段PID控制能取得更好的控制效果。
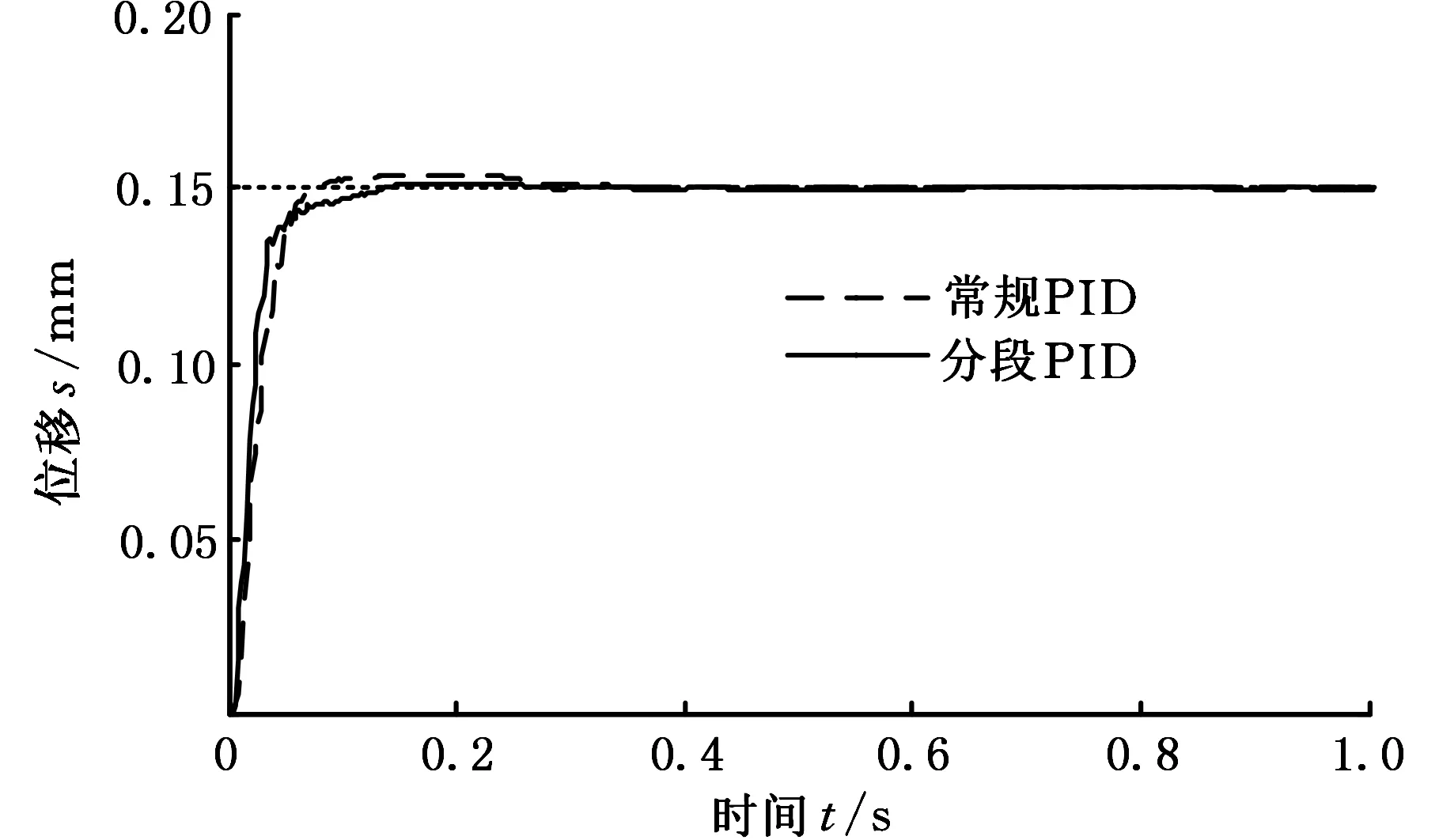
圖11 不同控制算法時的響應過程Fig.11 Response process of different control algorithms
4 結論
(1)本文提出了一種基于膜式液壓放大的壓電驅動器,并對關鍵部件小橡膠膜片進行了有限元靜力學、模態等分析。分析結果表明:小橡膠膜片的強度安全系數約為2.3,有足夠的安全強度;沿位移輸出方向的模態振型頻率約為307 Hz,有良好的工作頻寬。
(2)對所研制的壓電驅動器進行開環和閉環控制試驗。開環試驗結果表明:在0~100 V電壓控制下,所研制的驅動器輸出位移范圍為0~0.24 mm,放大比約為5;閉環控制試驗結果表明:采用分段PID控制的驅動器控制效果優于采用常規PID控制的控制效果,穩態誤差約為±0.5 μm。
[1] SMC(中國)有限公司. 現代實用氣動技術[M]. 3版.北京: 機械工業出版社, 2008:316.
SMC(China)Co., Ltd.,. Modern Practical Pneumatic Technology[M]. 3rd ed.Beijing: Mechanical Industry Press, 2008:316.
[2] 許有熊, 李小寧. 新型壓電式氣動PWM數字比例閥建模及仿真研究[J]. 系統仿真學報,2010,22(2):2296-2301.
XU Youxiong, LI Xiaoning. Modeling and Simulation Research of Novel Piezoelectric Type Pneumatic PWM Digital Proportional Valve[J]. Journal of System Simulation,2010,22(2):2296-2301.
[3] LIU Weichuan, CHENG Long, HOU Zengguang, et al. An Inversion-free Predictive Controller for Piezoelectric Actuators Based on a Dynamic Linearized Neural Network[J]. IEEE/ASME Transactions on Mechatronics,2016,21(1):214-226.
[4] 玲明祥,劉謙,曹軍義,等.壓電位移放大機構的力學解析模型及有限元分析[J].光學精密工程,2016,24(4):812-818.
LING Mingxiang, LIU Qian, CAO Junyi, et al. Analytical Model and Finite Element Analysis of Piezoelectric Displacement Amplification Mechanism[J]. Optics and Precision Engineering,2016,24(4):812-818.
[5] 俞軍濤,焦宗夏,吳帥.基于液壓微位移放大結構的新型壓電陶瓷直接驅動閥設計與仿真[J]. 機械工程學報,2013,49(2):151-158.
YU Juntao, JIAO Zongxia, WU Shuai. Design and Simulation Study on New Servo Valve Direct Driven by Piezoelectric Actuator Using Hydraulic Amplification[J]. Journal of Mechanical Engineering,2013,49(2):151-158.
[6] 張福學, 王麗坤. 現代壓電學[M].北京:科學出版社,2001:91.
ZHANG Fuxue, WANG Likun. Modern Piezoelectric[M]. Beijing: Science Press,2001:91.
[7] 郭萬泉. 橡膠膜片有效面積的測定及其影響因素[J]. 航空制造技術,2003(10):53-56.
GUO Wanquan. Determination and the Influence Factors of the Effective Area of Rubber Film[J]. Aeronautical Manufacturing Technology,2003(10):53-56.
[8] KHALIL M, MAKREM A, MOHAMED T, et al. Singular Electrostatic Fields Near the Notch Vertex of a Mooney-Rivlin Hyper Elastic Body[J]. International Journal of Solids and Structures,2016,80:532-544.
[9] 成大先. 機械設計手冊(常用機械工程材料分冊)[M]. 北京:化學工業出版社,2017:367.
CHENG Daxian. Machine Design Handbook (Common Mechanical Engineering Materials Volume)[M]. Beijing: Chemical Industry Press,2017:367.
[10] 蔡成波, 崔玉國, 蔡永根, 等. 壓電微動平臺的改進PID控制[J]. 壓電與聲光,2015,38(3):441-444.
CAI Chengbo, CUI Yuguo, CAI Yonggen, et al. Improved PID Control of Piezoelectric Micro-positioning Stage[J]. Piezoelectric and Acoustooptics,2015,38(3):441-444.
[11] 魏燕定.壓電驅動器的非線性模型及其精密定位控制研究[J]. 中國機械工程,2004,15(7):565-568.
WEI Yanding. Study on Non-linear Model of Piezoelectric Actuator and Accurate Positioning Control Strategy[J].China Mechanical Engineering,2004,15(7):565-568.
DesignandExperimentofPiezoelectricActuatorBasedonDiaphragmTypeHydraulicAmplification
WANG Jianhong1ZHOU Hao2XU Youxiong1LIU Di1
1.School of Automation, Nanjing Institute of Technology, Nanjing, 211167 2.School of Mechanical Engineering, Nanjing Institute of Technology, Nanjing, 211167
In order to solve the problems of the stack piezoelectric ceramic minute output displacements, which might not meet the practical applications, a piezoelectric actuator was proposed based on diaphragm type hydraulic amplification and the statics and modal analyses of the rubber diaphragm were analyzed by finite element analysis method. The analysis results show that the rubber diaphragm has sufficient safety strength and good working bandwidth. Then, the physical prototype of a piezoelectric actuator was developed and its control platform was built. Finally, the experimental research on the piezoelectric actuator was done. The open-loop experimental results show that the output displacement range is as 0~24 mm under the control voltage of 0~100 V and the actual amplification ratio is as 5. The closed-loop control experimental results show that the control effectiveness of the segmented PID is better than the conventional PID ,and the steady-state errors are about ±0.5 μm.
hydraulic amplification;piezoelectric actuator;segmented PID; finite element
TH137
10.3969/j.issn.1004-132X.2017.21.009
2016-05-23
國家自然科學基金資助項目(61503180);江蘇省先進數控技術重點實驗室開放基金資助項目(SYKJ201601);南京工程學院科研基金資助項目(CKJA201605)
(編輯陳勇)
王建紅,女,1977年生。南京工程學院自動化學院講師。主要研究方向為壓電驅動與控制。E-mail:zdhxwjh@njit.edu.cn。周浩,男,1992年生。南京工程學院機械工程學院碩士研究生。許有熊,男,1980年生。南京工程學院自動化學院副教授、博士。劉娣,女,1983年生。南京工程學院自動化學院副教授、博士。
猜你喜歡
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24