空地協同實時搜索系統
2017-11-17 07:22:42寧夏大學朱小波王中意
電子世界 2017年21期
關鍵詞:檢測
寧夏大學 朱小波 王中意 車 進
空地協同實時搜索系統
寧夏大學 朱小波 王中意 車 進
采用無人機與地面機器人協同搜索可以在未知條件下進行物體搜索,本設計采用無人機室內自動導航,并記錄空間位置信息,再搜尋到物體時返回將空間位置信息傳遞給地面機器人,然后協同地面機器人進行搜尋,在抓取后沿最優路徑返回.
協同搜索;自動導航;最優路徑;位置信息
0 引言
隨著現代科技的發展,空間機器人與地面機器人協同工作變得越來越重要.地面機器人由于其所處空間比較有限,因此對全局的環境感知能力較弱,尤其是在城市災害救援等完全未知的應用環境中局限比較大[1].比較有效的解決辦法是采用空地機器人協作,無人機和地面機器人所具有的功能互補性使二者間的協作執行效率明顯的提升[1-2].利用無人機構建全局環境模型,為地面機器人提供導航信息,從而提高任務使命的完成度.通過空地機器人協作平臺的搭建,進行路徑規劃、無人機與地面機器人之間的通信;進而到達目的地點并抓取目標,沿最優路徑返回.
1 空地機器人協同整體設計
本系統中地面機器人采用NAO人形機器人,空中采用四旋翼機器人,實驗場景為室內搭建的迷宮.迷宮的模型為每個小方格為60cm*60cm,總共16個小方格,豎直墻壁高度為60cm.這樣可以使NAO機器人能夠自由地在迷宮里行走、轉彎,同時避免了外界的干擾.整個系統主的功能實現為:首先無人機起飛在迷宮中尋找需要搜索的物體同時記錄下搜尋過的空間位置,在找到物體后標記物體所在位置信息;無人機返回并懸停在NAO機器人的上部,同時NAO啟動準備出發,此時無人機與NAO同步行走,當遇到拐彎處或者NAO機器人走偏時.無人機可以給予正確的引導.當NAO達搜尋點時,NAO開始抓取,抓取后沿最有路徑返回.系統總體框圖如圖1所示.
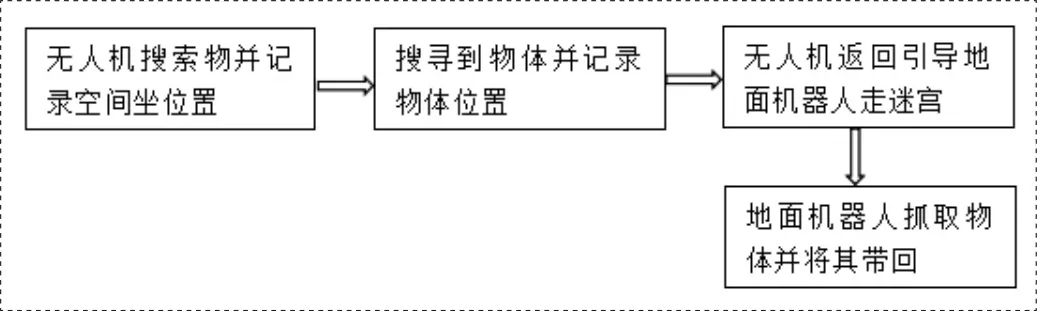
圖1 系統總體框圖
2 無人機室內定位
2.1 定位算法
由于室內環境復雜且沒有GPS信號,因此四旋翼無人機飛行和搜尋目標物體比較困難.
因此本文研究了適用于室內環境的基于激光雷達的三維定位技術.在激光雷達為二維定位基礎上,結合慣性導航單元,實現室內的三維定位.尋求當前掃描數據集合{(rc1,ξc1),(rc2,ξc2)...(rci,ξci)...}與參考掃描數據集合{(rr1,ξr1),(rr2,ξr2)...(rri,ξri)...}之間的最佳匹配關系是利用激光雷達進行相對位姿估計的本質[1-3].本文選用了一種基于角度對應關系的位姿估計算法,算法利用了激光雷達掃描數據的特點,據參考掃描中依次排列的角度信息尋找與當前掃描數據點的對應關系,計算出當前掃描到參考掃描的相對位姿信息.
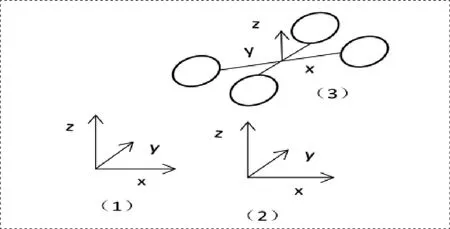
圖2 坐標示意圖
2.2 三維環境下無人機定位

因為無人機坐標系(3)到虛擬坐標系(2)下的變換需要先經過x在經過y兩個方向軸,所以可以得無人機坐標系(3)到虛擬坐標系(2)下的轉換矩陣為:

笛卡爾坐標為:

經變換后可得坐標為:

無人機在迷宮上方搜索的過程中記錄下飛行軌跡,當搜尋到物體時記錄下被搜尋物體的位置,返回將其數據發送至NAO機器人.
3 空地協同搜索
對于無人機與NAO機器人協同搜索采用波門跟蹤算法.波門算法一般分為三種情況:(1)沒有要求的目標時,在等待模式;(2)當目標出現時,并且目標出現在波門內,此時在跟蹤模式;(3)目標從波門消失時,波門會進行全局搜索.NAO在運動過程中,在短暫的時間它的運動軌跡遵循某一確定函數關系.設NAO機器人在前a幀圖像中的中心位置坐標為(xk,yk),K的取值范圍為(0,1,2,3...a).NAO運動的x坐標推導與y坐標推導類似,所以本文僅推導x坐標[2-5].
假設x的最符合要求的二次函數可以用下式表示:

通過前面a各xk,可以得到這a個點的誤差方差:

使用最小二乘法來讓誤差平方達到最小化,可得:

將(3-3)式帶入(3-1)便可以算出下一幀中NAO位于圖片的中的位置.
4 NAO抓取抓取及沿最優路徑返回
4.1 抓取設計
目標物的識別與抓取主要分為以下三個步驟:
第一步:對Nao機器人兩個攝像頭所獲得圖像進行檢測.在當前Nao機器人的姿態和位置,如果兩個攝像頭的圖像中都沒有檢測到小棒,那么通過調整Nao機器人向前走一定距離,然后重新檢測圖像中是否存在目標物體.當檢測到小棒存在,則調整機器人位置姿態,使機器人軀干面對小棒.重復進行上述檢測,該過程至多循環四次即可檢測Nao機器人周圍是否有小棒出現.第二步:調整Nao機器人自身角度,使小棒處在Nao機器人正對面位置,接著對小棒重新進行檢測,如果小棒出現在頂部攝像頭,那么Nao機器人則向前行走至底部攝像頭可以檢測到小棒為止.如果小棒已經出現在底部攝像頭視野內則可直接進入下一步.第三步:底部攝像頭檢測到小棒之后,通過多次調整角度,小棒處于底部攝像頭的視野中央.接下來通過一系列的機器人的位置、角度調整以及檢測,使小棒位于底部攝像頭視野中的特定位置.當小棒位于該特定位置時,小棒與機器人的距離恰好為撿棒程序所要求的距離,可以撿起小棒.
4.2 最優路徑返回
為了NAO機器人能夠快速的回來,在NAO搜尋物體的時候需要記錄下迷宮的路徑信息.這樣在回來的時候可以快速的返回到原點.結合深度優先搜索算法的思路,采取右巡線的策略,即"右-上-左"規則實現搜索物體[6-8].同時在遇到死胡同時,能夠有效地刪除路徑信息,本文采用的編碼方式為:右轉為1;直行為2;左轉為3.在圖3所示中本文只選取了右拐,左拐右拐都存在,以及四岔口說明,其他的類似.右拐編碼為[1,0],既有左轉又有右轉的雙向路口時編碼為[1,3],十字路口編碼為[1,23].
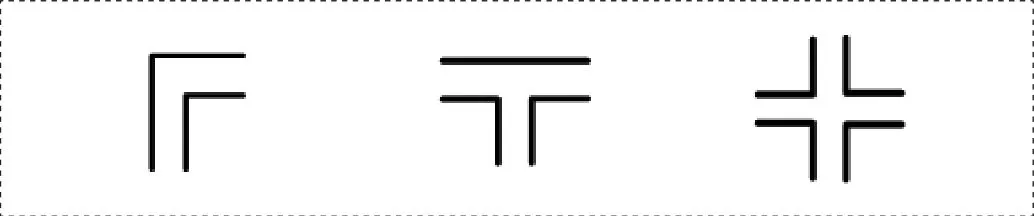
圖3 迷宮編碼示意圖
5 實驗分析
5.1 定位及最優路徑返回實驗
實驗中采用無人機和NAO機器人協同走迷宮.目前可以實現無人機對NAO的目標識別,同時可以實現無人機的同步跟蹤以及對NAO機器人走迷宮的正確引導.如圖4所示為對NAO的識別以及對目標物體的識別.
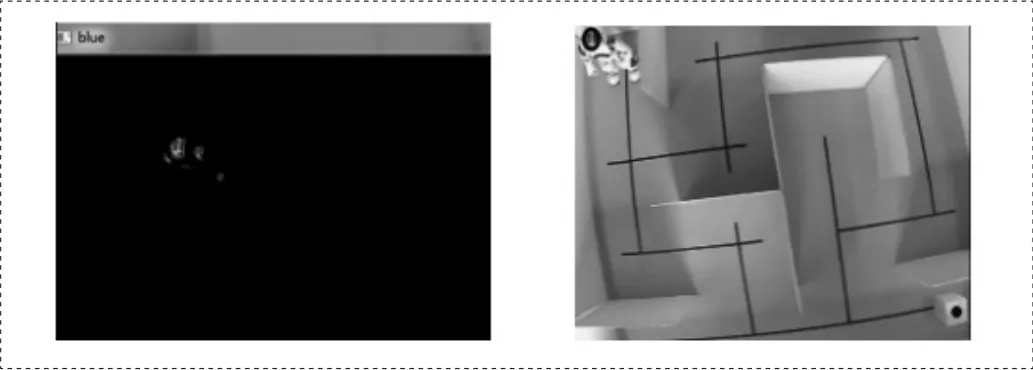
圖4 對NAO的識別以及對目標物體的識別
5.2 目標抓取實驗
在實驗中被抓取的小棒被放置在箱體上面,箱子與小棒均設置為一定的高度.機器人對目標物體識別后繼而定位,當Nao機器人走到距目標物體設定距離后則停止.然后執行預先設定好的抓取動作,對目標物體進行抓取.如圖5所示為NAO抓取實驗.
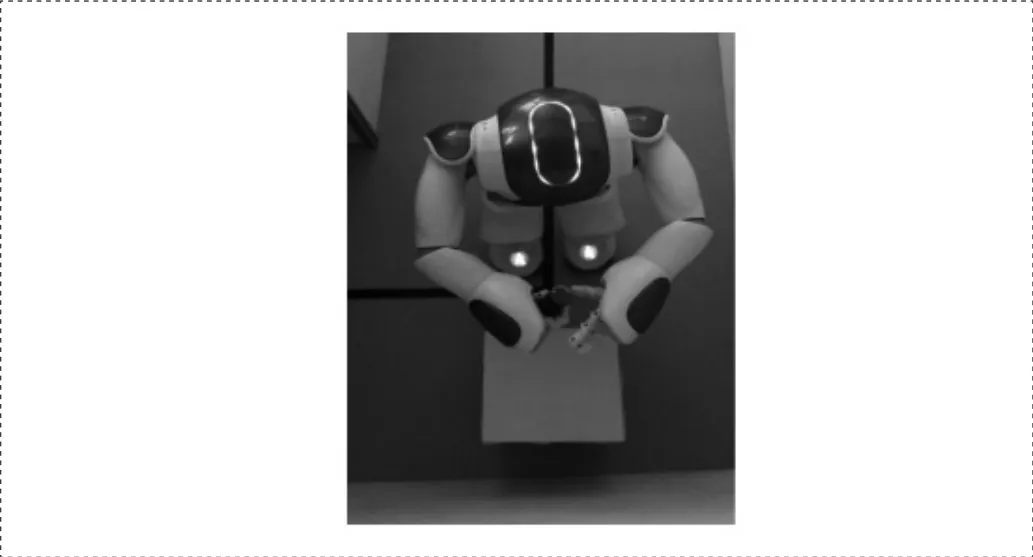
圖5 NAO抓取小棒
本系統可以實現無人機與地面機器人協同搜索物體的目的,可以在復雜的環境中實現搜索,比如像未知情況的室內環境等.本系統實現了部分的功能,還有一部分功能待實現,以及需要改進的地方.
[1]谷豐,王爭,宋琦.空地機器人協作導航方法與實驗研究[J].中國科學技術大學學報,2015(05):398-404.
[2]郭芳.復雜環境下四旋翼無人機定位研究[D].天津大學,2012.
[3]李丹.基于視覺的空地機器人協作方法研究[D].沈陽理工大學,2013.
[4]袁麗.NAO機器人的視覺伺服物品抓取設計與實現[D].山東大學,2015.
[5]劉建.礦用救援機器人關鍵技術研究[D].中國礦業大學,2014.
[6]李道新.基于深廣結合算法的迷宮機器人路徑規劃研究[D].湖南大學,2011.
[7]虞成誠,鐘聲,胡紹華.基于深度優先搜索的一般圖匹配算法[J].計算機工程與科學,2008,(12):45-48.
[8]李道新.基于深廣結合算法的迷宮機器人路徑規劃研究[D].湖南大學,2011.
注:本文獲寧夏大學研究生創新項目資助(項目編號:GIP2017012).
車進.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
