BTT導彈的三通道駕駛儀頻帶匹配關系研究
2017-11-21 04:22:45溫求遒夏群利
航天控制 2017年5期
李 威 溫求遒 夏群利
北京理工大學, 北京 100081
BTT導彈的三通道駕駛儀頻帶匹配關系研究
李 威 溫求遒 夏群利
北京理工大學, 北京 100081
針對BTT導彈滾轉角速度較大,俯仰和偏航通道具有強耦合、非線性的飛行控制特點,基于合理假設,通過線性化策略解耦得到相互獨立的三通道彈體動力學模型,采用三通道獨立設計的思想完成導彈三通道駕駛儀的設計。在此基礎上,得到了三通道駕駛儀的閉環(huán)階躍響應、開環(huán)系統(tǒng)幅相裕度以及導彈飛行參量的變化曲線,討論了三通道控制系統(tǒng)響應快速性及頻帶匹配關系。根據(jù)仿真結果,得到了BTT導彈在滿足滾轉通道穩(wěn)定性的前提下,盡量提高其頻帶,保持俯仰和偏航通道響應速度的一致性有利于消除通道間的耦合,增強BTT導彈的協(xié)調轉彎能力。
BTT導彈;三通道駕駛儀;頻帶匹配;協(xié)調轉彎
采用傾斜轉彎(Bank-To-Turn,BTT)控制的導彈用極坐標的方式生成控制指令,要求其滾轉通道快速響應滾轉指令,以保證將其最大升力面轉到理想的方向進行機動飛行[1]。側向通道實現(xiàn)側滑角歸零,以起到協(xié)調轉彎的作用。
BTT導彈由于滾轉角速度和側向通道控制偏差的存在,使得其三通道的控制數(shù)學模型存在強烈的運動學耦合和氣動交叉耦合項。此外,由于BTT彈體具有很強的靜不穩(wěn)定性,其對三通道控制系統(tǒng)的魯棒性要求更高。
協(xié)調匹配的三通道駕駛儀頻帶是在保證控制系統(tǒng)穩(wěn)定裕度的條件下,提高側向通道的協(xié)調轉彎能力,盡可能消除通道間耦合。目前,側向通道主要通過3種方式實現(xiàn)其協(xié)調轉彎的控制: 1)側滑角反饋直接消除側滑角;2)由外回路采用側向加速度反饋實現(xiàn)側滑歸零;3)在一定的滾轉角和飛行速度下,基于偏航角速度不變原理實現(xiàn)協(xié)調轉彎。基于上述理論,開展BTT導彈的三通道控制系統(tǒng)頻帶關系研究,旨在提高駕駛儀的抗干擾能力,增強控制系統(tǒng)的穩(wěn)定性,保證導彈精確命中目標,滿足導彈飛行過程及終端的各項約束指標。
1 BTT彈體控制建模
基于BTT彈體的飛行控制特點,其三通道控制數(shù)學模型存在的主要耦合項是運動學耦合和氣動耦合,因此主要針對這2類耦合項的影響進行分析,并基于合理假設,建立考慮耦合的BTT彈體三通道線性化動力學模型[2-3]。
相關假設如下:
1)考慮導彈飛行過程中的重力影響,并假設其在理想彈道附近運動,即小擾動運動;
2)導彈速度變化緩慢,即認為導彈速度矢量維持常值并沿水平方向;
3)導彈滿足面對稱條件,即慣性積Jxz=Jyz=0數(shù)值較小,可忽略;
4)假設導彈飛行過程中的攻角和側滑角較小,認為sinα≈α,cosα≈1,sinβ≈β,cosβ≈1。
1.1 BTT彈體耦合特性分析
基于以上相關假設,建立彈體的三通道控制系統(tǒng)數(shù)學模型如下
(1)
從式(1)可以看出,BTT彈體由于氣動外形不對稱以及運動學的因素,使其數(shù)學模型除了含有正常的三通道控制力和控制力矩外,含有各種耦合力及力矩項,對其進行分類如下:
1)運動學耦合,彈體系下導彈一個方向的運動會在另一個方向產(chǎn)生耦合的力,其中偏航通道的耦合較為嚴重;
2)氣動耦合,導彈流場不對稱、非線性等因素引起的,其中最主要的耦合項為側滑角帶來的滾轉通道斜吹力矩;
3)控制交叉耦合,導彈一通道的氣動操縱控制會在另一通道產(chǎn)生耦合的力與力矩,通常主要項為方向舵(副翼)偏轉在滾轉(偏航)通道產(chǎn)生的耦合力矩。
1.2 協(xié)調轉彎駕駛儀結構分析
BTT導彈機動過程中,彈體最大升力面的指令信號在慣性系經(jīng)過分解可得到導彈側向的期望過載指令,從而產(chǎn)生側滑角[4-5]。基于上述側滑角的產(chǎn)生機理,并結合工程實際要求,可知對于偏航通道而言,其駕駛儀期望的輸入指令始終為0,其側向轉彎產(chǎn)生的偏航加速度和角速度相當于干擾信號。因此對于偏航通道駕駛儀,其內回路設計主要考慮增加彈體阻尼,多采用偏航角速度反饋,而外回路則采用彈體系下的側向加速度反饋盡量實現(xiàn)側滑歸零,且利于工程實現(xiàn)。
結合上述分析,給出BTT導彈協(xié)調轉彎控制的三通道駕駛儀原理框圖如圖1~3。
圖1 俯仰通道駕駛儀
圖2 偏航通道駕駛儀
圖3 滾轉通道駕駛儀
從圖1可知,其俯仰通道駕駛儀由3個反饋回路組成,即阻尼回路、姿態(tài)角回路和加速度回路。姿態(tài)角速度及姿態(tài)角回路近似姿態(tài)駕駛儀,可增加彈體頻率及阻尼,而前向通道含有積分環(huán)節(jié),減小駕駛儀跟蹤靜差[6]。圖2為偏航通道駕駛儀結構框圖,可在其前向通道加入合適的PI校正環(huán)節(jié)以提高控制系統(tǒng)的穩(wěn)定裕度,增強導彈協(xié)調轉彎能力。圖3為滾轉通道駕駛儀,采用姿態(tài)駕駛儀,外回路滾轉角反饋快速響應滾轉指令,內回路滾轉角速度反饋提高系統(tǒng)阻尼。
2 俯仰-滾轉通道頻帶匹配關系研究
根據(jù)建立的BTT彈體控制系統(tǒng)數(shù)學模型,以及對三通道駕駛儀結構特性的分析,并根據(jù)假設,將彈體三通道解耦成完全獨立的控制模型,完成自動駕駛儀的設計。針對各通道不同的設計頻帶,引入通道耦合對駕駛儀系統(tǒng)性能進行詳細分析,最后通過對比得出合理的三通道駕駛儀頻帶匹配關系。
2.1 駕駛儀參數(shù)設計
忽略舵機動力學,俯仰三回路過載駕駛儀為三階系統(tǒng),選取設計指標參數(shù)τpitch,ωpitch和μpitch,從而可根據(jù)極點配置方法確定控制系統(tǒng)的3個參數(shù),即ka,kg和ωi。通常情況下,要求三回路駕駛儀特征方程的一階主根決定系統(tǒng)的快速性,而二階振蕩根則主要對系統(tǒng)動態(tài)特性進行調節(jié)。
忽略舵機動力學,偏航兩回路過載駕駛儀和滾轉通道姿態(tài)駕駛儀均為二階系統(tǒng),偏航及滾轉通道同樣可以根據(jù)期望的系統(tǒng)性能,利用極點配置方法完成系統(tǒng)設計,確定駕駛儀參數(shù)ka,kg和kar,kgr。
下面給出1組典型的彈體氣動參數(shù),數(shù)據(jù)見表1~3。

表1 俯仰通道彈體氣動數(shù)據(jù)

表2 偏航通道彈體氣動數(shù)據(jù)

表3 滾轉通道彈體氣動數(shù)據(jù)
2.2 駕駛儀快速性指標分析
分析時首先忽略舵機動力學影響,控制系統(tǒng)可以設計得足夠快,選取俯仰通道三回路過載駕駛儀的設計指標為τpitch=0.25,ωpitch=5rad/s和μpitch=0.75。為分析滾轉通道對俯仰通道的影響,先假定偏航通道和俯仰通道快速性基本相同,則選定偏航通道的設計指標為ωyaw=5rad/s和μyaw=0.75。基于上述分析,可得俯仰和偏航通道的單位階躍響應,見圖4。從圖4可知,俯仰通道階躍響應時間為ts=0.332s。
圖4 俯仰和偏航通道單位階躍響應
取不同的滾轉駕駛儀響應速度,分別設計滾轉通道駕駛儀響應速度是俯仰通道的0.5倍、1倍、2倍和4倍,并給出其對應的設計參數(shù),見表4。

表4 滾轉駕駛儀設計參數(shù)
下面給出不同頻帶下的滾轉通道單位階躍響應曲線,見圖5。
圖5 滾轉通道單位階躍響應
假設導彈當前飛行狀態(tài)下,期望的俯仰通道加速度指令aybc=5m/s2,滾轉通道姿態(tài)指令γc=5°,偏航通道協(xié)調轉彎加速度指令azbc=0m/s2,得到滾轉駕駛儀不同快速性時的三通道仿真曲線,見圖6~10。
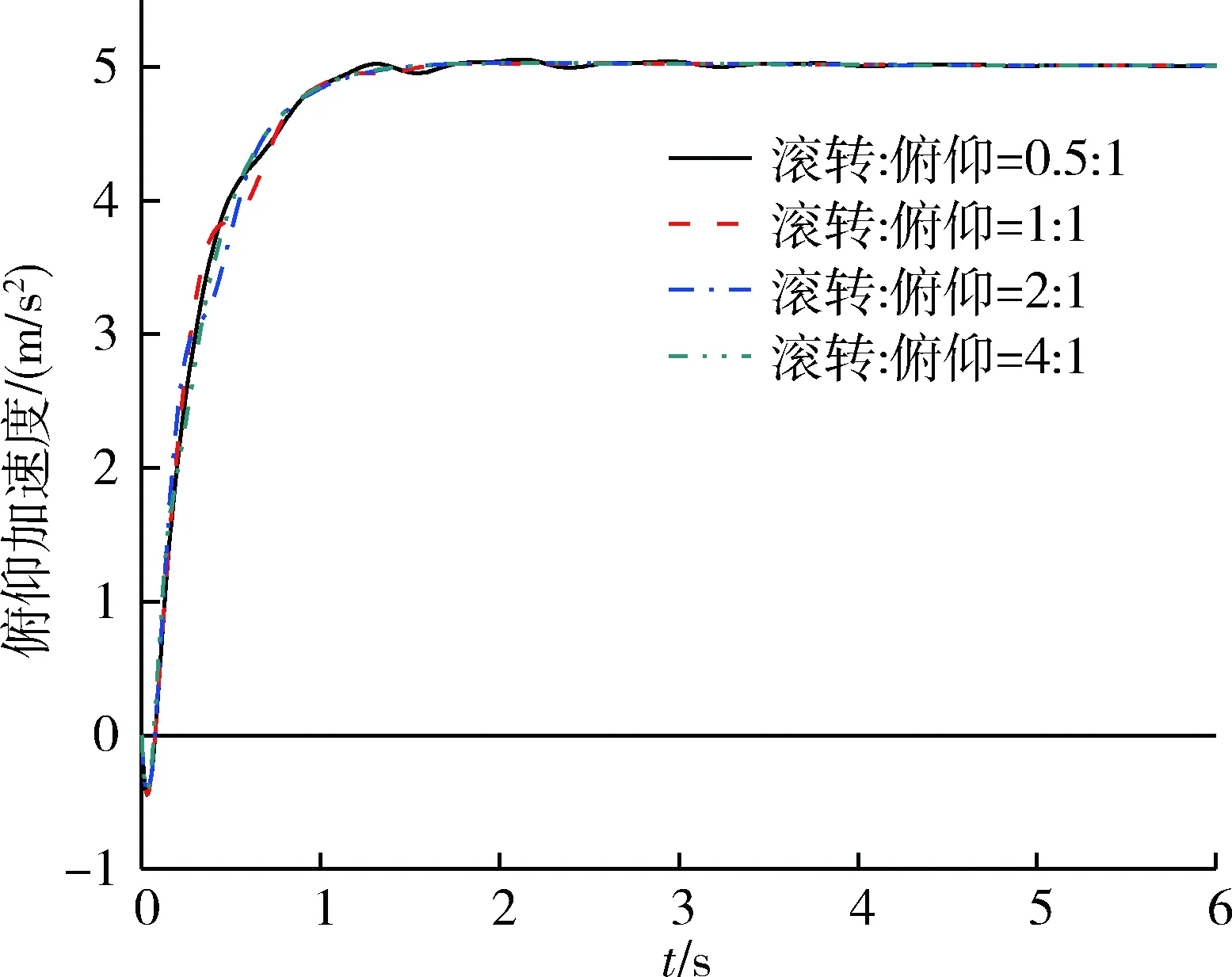
圖6 俯仰加速度曲線
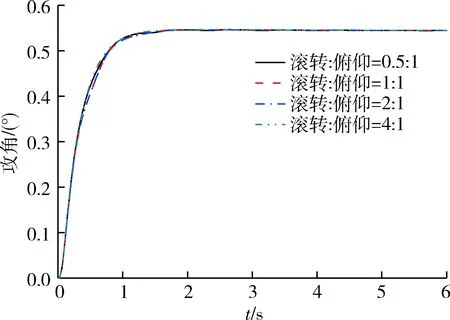
圖7 攻角變化曲線
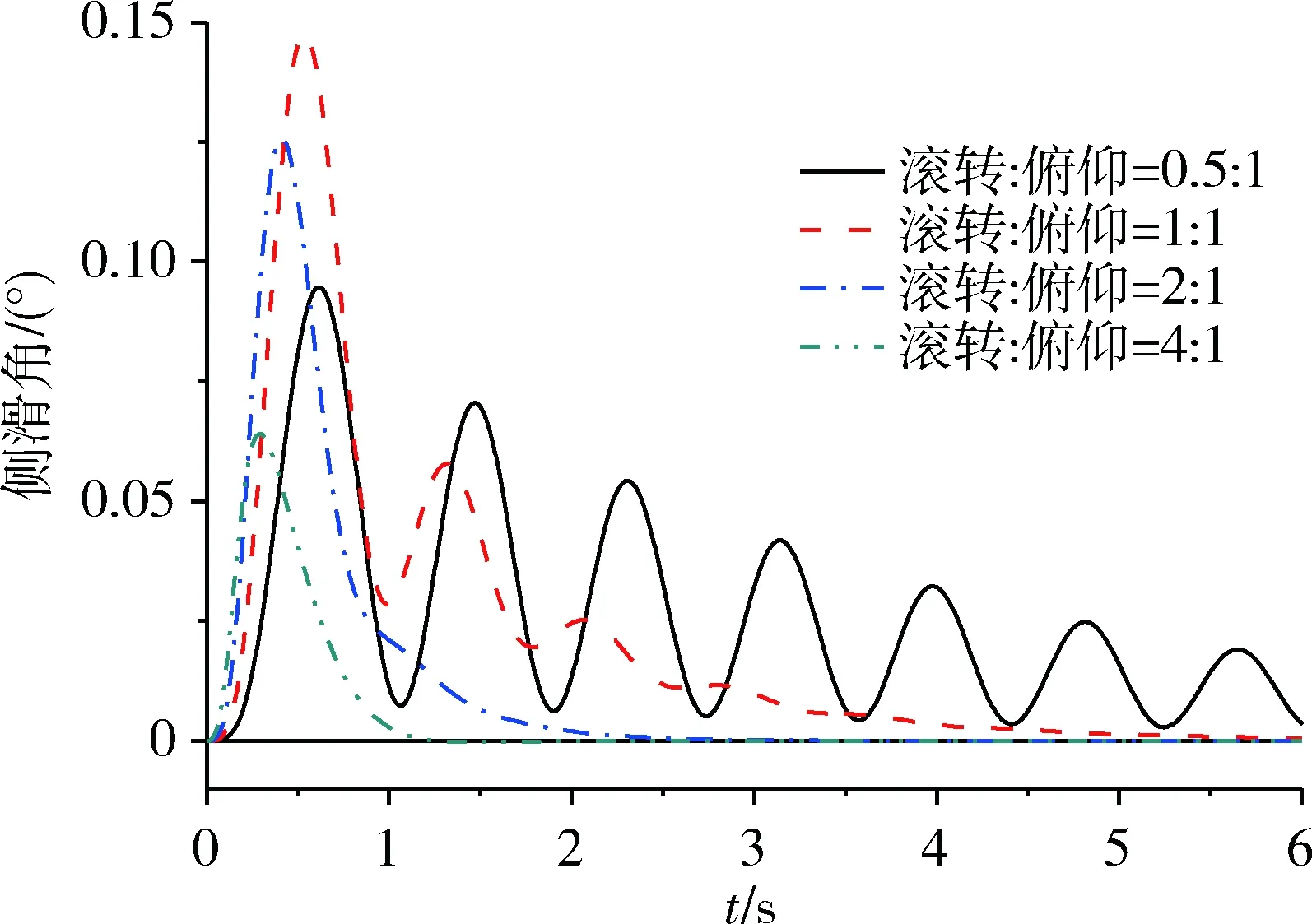
圖8 側滑角變化曲線
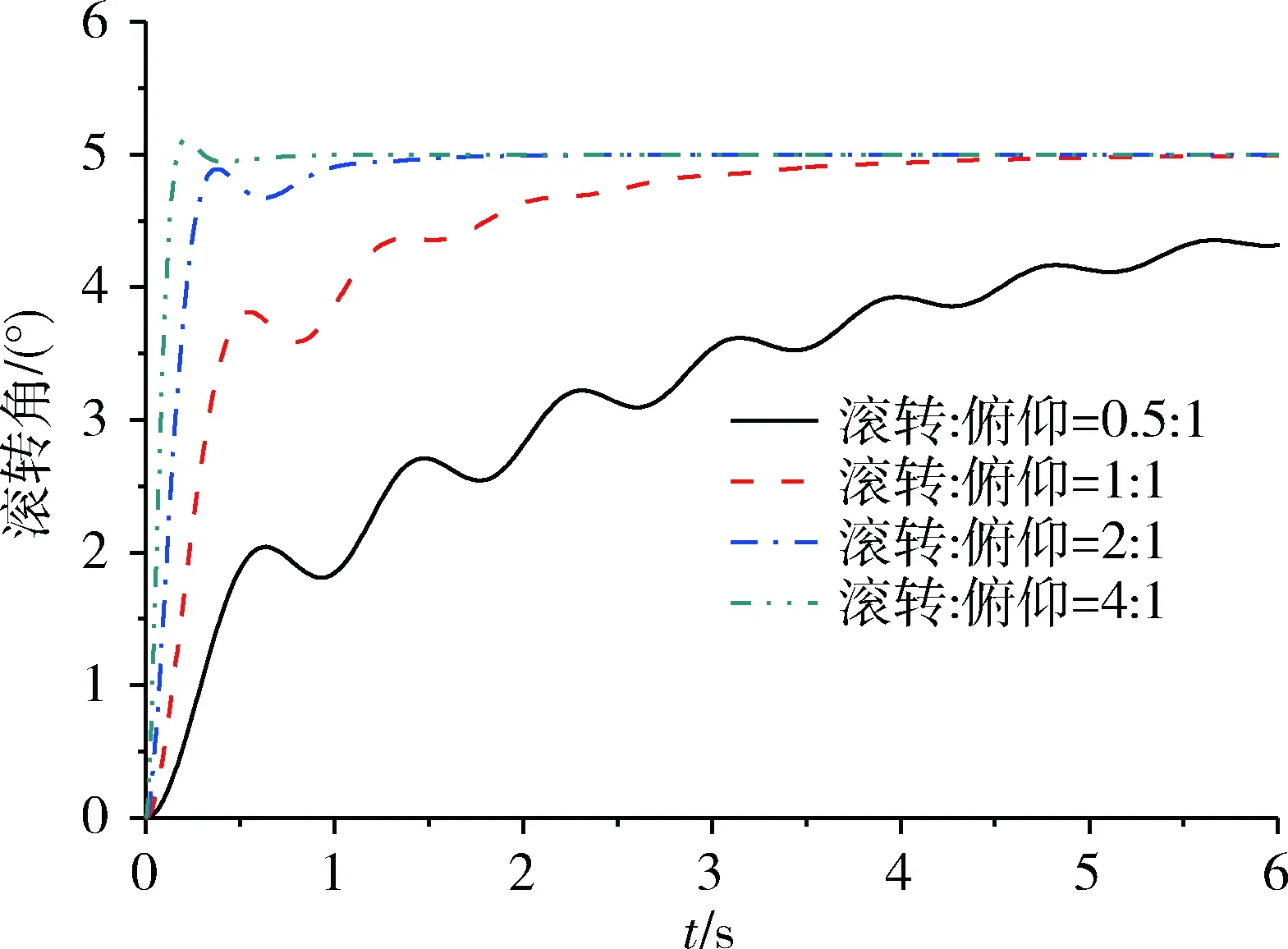
圖9 滾轉角變化曲線
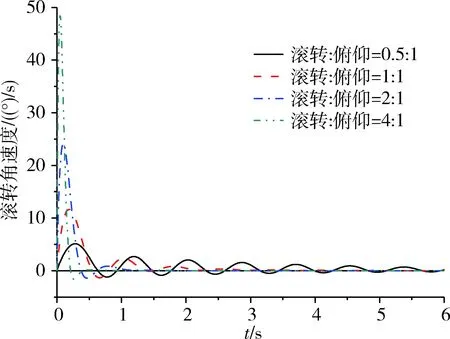
圖10 滾轉角速度變化曲線
由圖6~ 10可以得出結論:
1)滾轉通道的響應速度對三通道的控制系統(tǒng)影響較大。當滾轉通道的頻帶比俯仰通道慢時,三通道振蕩較嚴重,控制系統(tǒng)甚至出現(xiàn)失穩(wěn)現(xiàn)象,分析控制系統(tǒng)數(shù)學模型可知,主要原因就是運動學耦合ωxbα導致偏航通道產(chǎn)生耦合側滑角β,并由氣動耦合cββ產(chǎn)生滾轉干擾力矩,滾轉通道過慢則不能快速消除干擾影響,產(chǎn)生干擾角速度,再由運動學耦合ωxbβ對俯仰通道造成影響;
2)當滾轉通道快速性達到2倍以上俯仰通道時,俯仰、滾轉響應滿足系統(tǒng)要求,偏航通道側滑角也能快速收斂,這是由于滾轉角能更快趨于穩(wěn)態(tài),滾轉角速度快速歸零,對俯仰及偏航通道的耦合影響明顯降低,因此可知提高滾轉通道頻帶能有效降低系統(tǒng)耦合影響。
然而,由于舵機等硬件動力學的限制,滾轉通道駕駛儀不可能設計得無限快,否則將造成整個制導控制回路的失穩(wěn)。假設舵機模型為二階環(huán)節(jié),其傳遞函數(shù)如下
(2)
確定滾轉駕駛儀阻尼系數(shù)μroll=0.75,分析可得不同滾轉頻帶下的系統(tǒng)開環(huán)幅相裕度,見圖11~ 12。
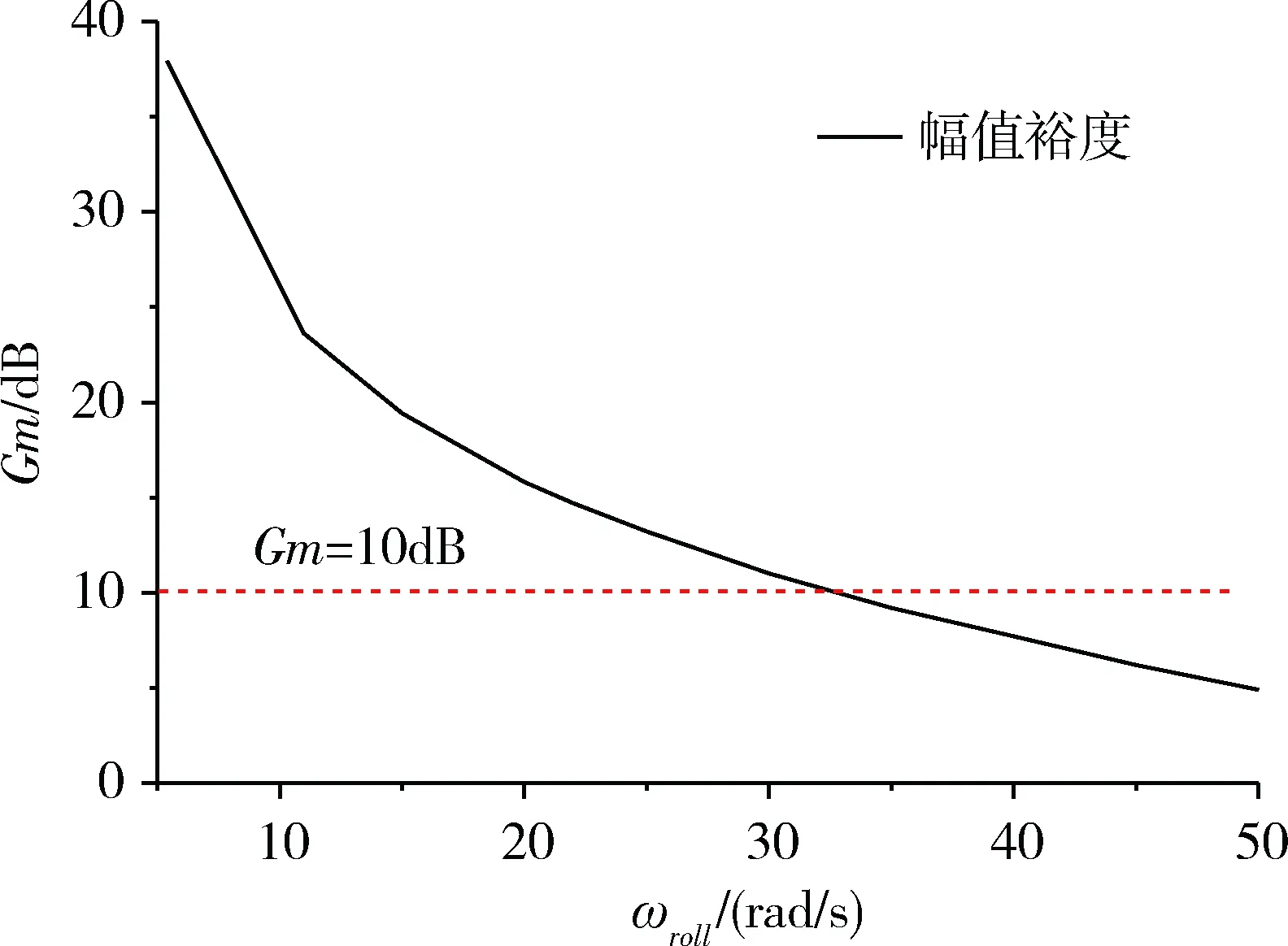
圖11 開環(huán)系統(tǒng)幅值裕度
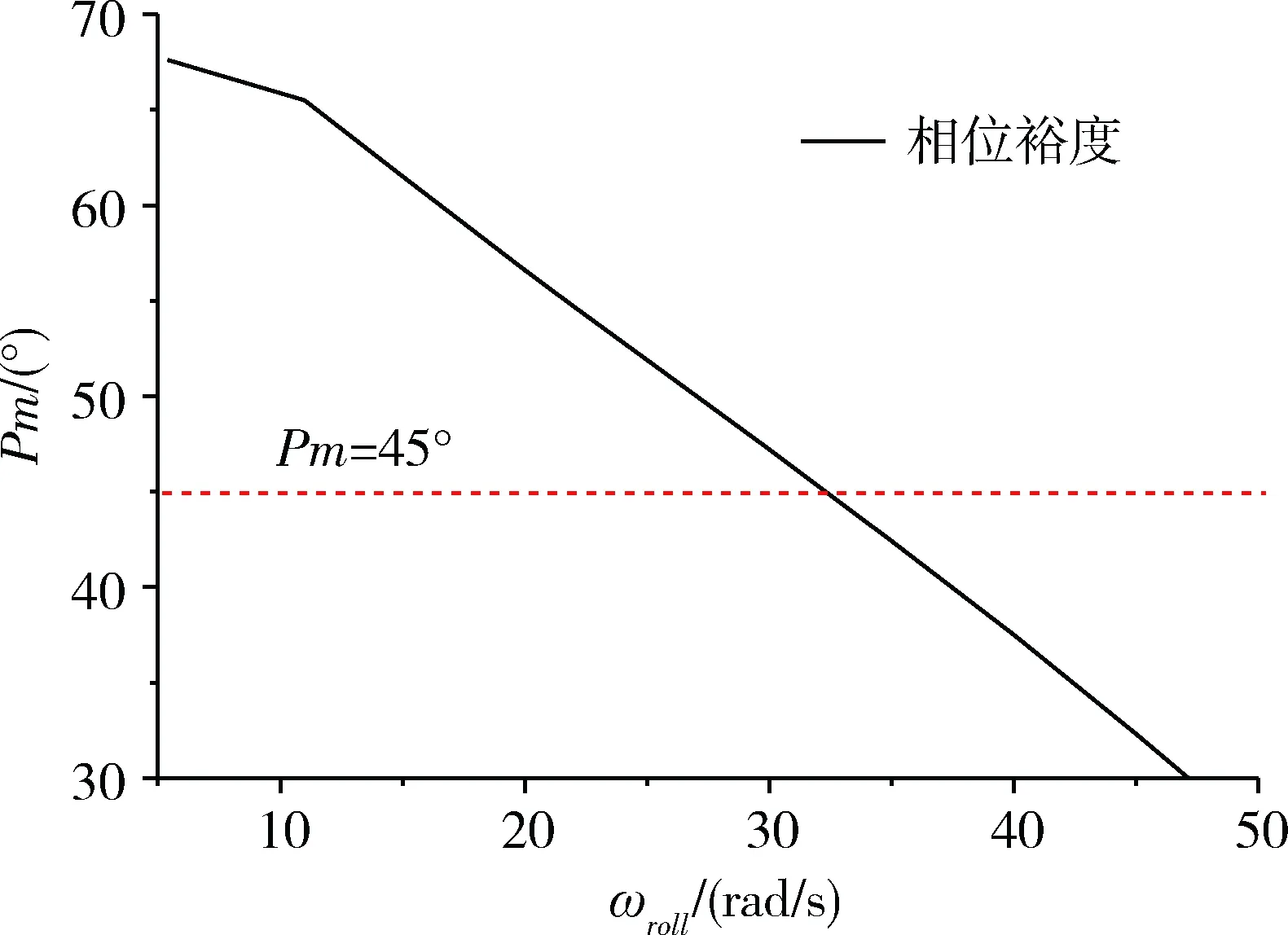
圖12 開環(huán)系統(tǒng)相位裕度
由圖11~ 12可知,根據(jù)控制系統(tǒng)的幅值裕度和相位裕度要求,可確定滾轉駕駛儀的頻帶ωroll,再根據(jù)滾轉通道和俯仰通道的頻帶關系可確定俯仰駕駛儀的相關設計指標參數(shù)。基于上述分析,考慮幅值裕度不低于10dB,相位裕度不小于45°,可選定滾轉駕駛儀的設計參數(shù)為ωroll=20rad/s,μroll=0.75。
3 偏航通道頻帶研究
基于之前對俯仰-滾轉通道駕駛儀頻帶的分析,結合對開環(huán)控制系統(tǒng)的幅相裕度要求,設計滾轉通道的參數(shù)為ωroll=20rad/s,μroll=0.75,俯仰通道的參數(shù)為τpitch=0.25,ωpitch=5rad/s,μpitch=0.75。為了分析偏航通道的快速性對三通道控制系統(tǒng)性能的影響,選取偏航通道的阻尼系數(shù)μyaw=0.75,分別選取偏航通道的響應速度為俯仰駕駛儀的0.5倍、1倍、2倍和3倍,對應的偏航通道駕駛儀頻帶ωyaw=2.5rad/s,5rad/s,10rad/s和15rad/s,得到偏航通道的單位階躍響應,見圖13。
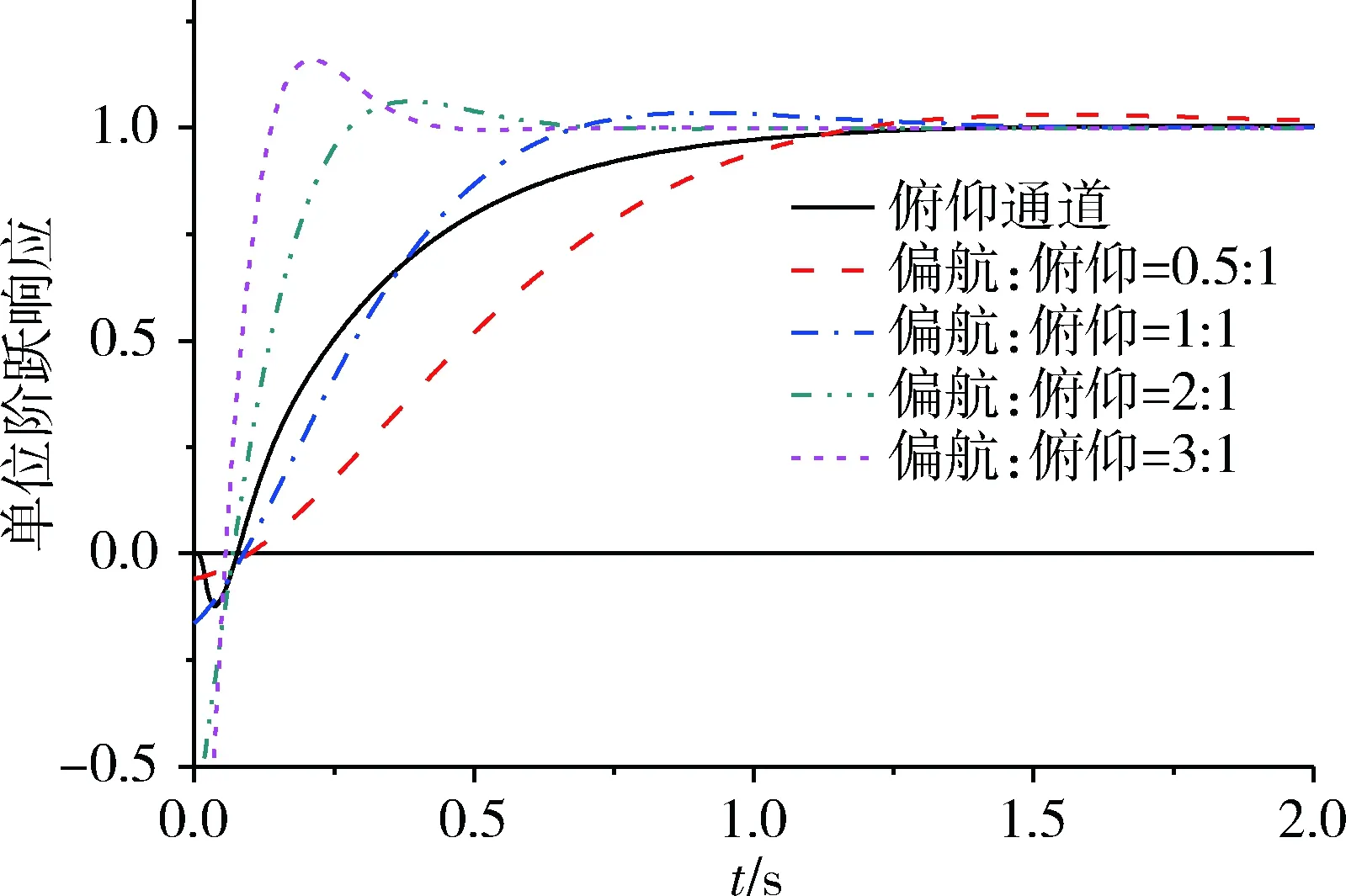
圖13 偏航通道單位階躍響應
根據(jù)上述分析,取俯仰指令aybc=5m/s2,滾轉指令γc=5°,偏航指令azbc=0m/s2,得到偏航駕駛儀不同設計頻帶對應的三通道仿真曲線,見圖14~17。
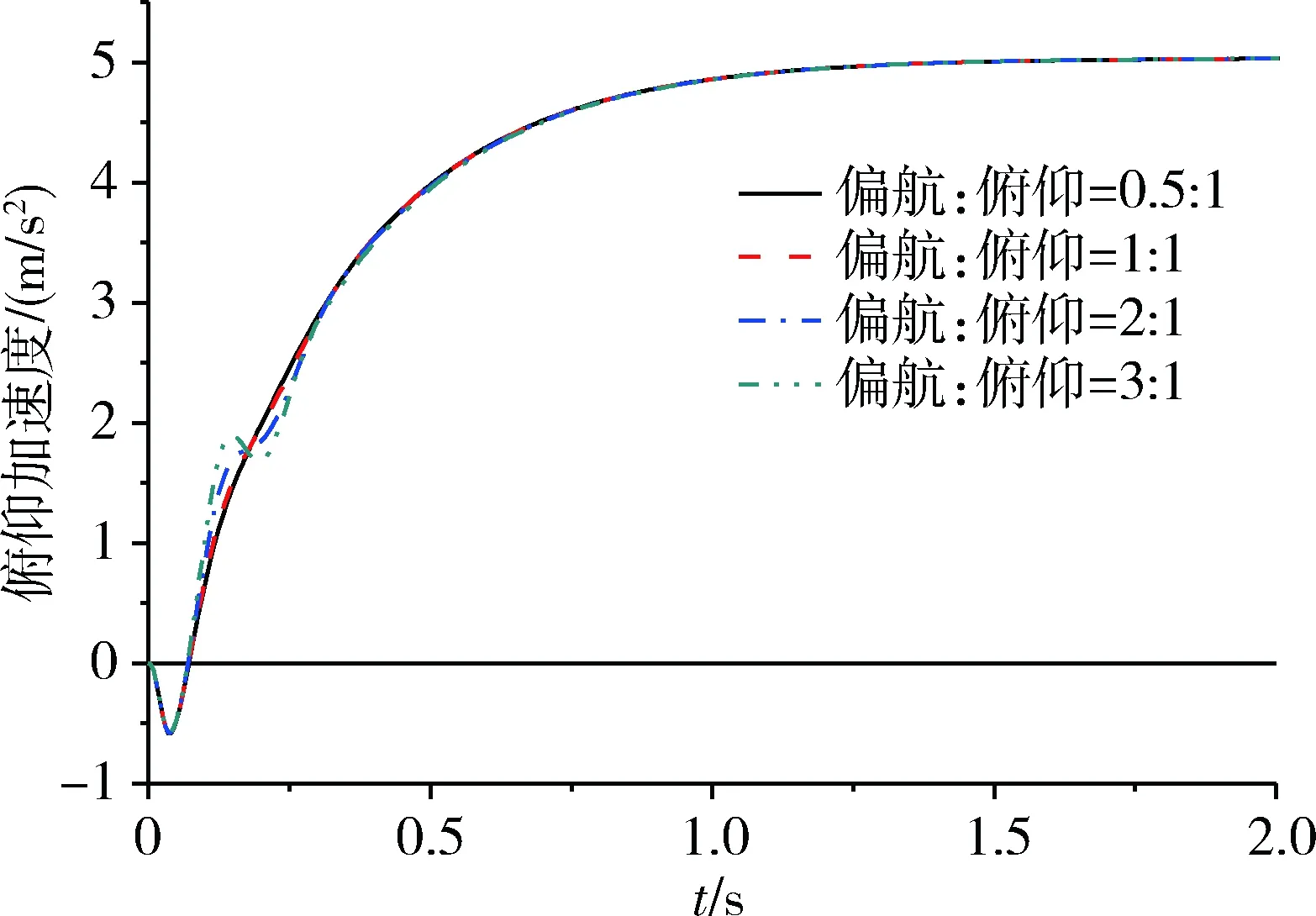
圖14 俯仰加速度曲線
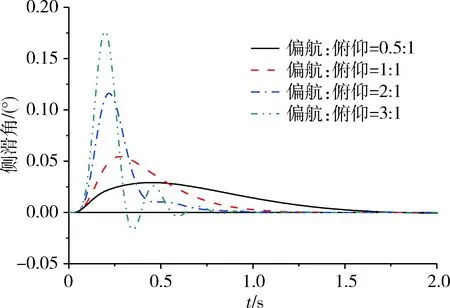
圖15 側滑角曲線
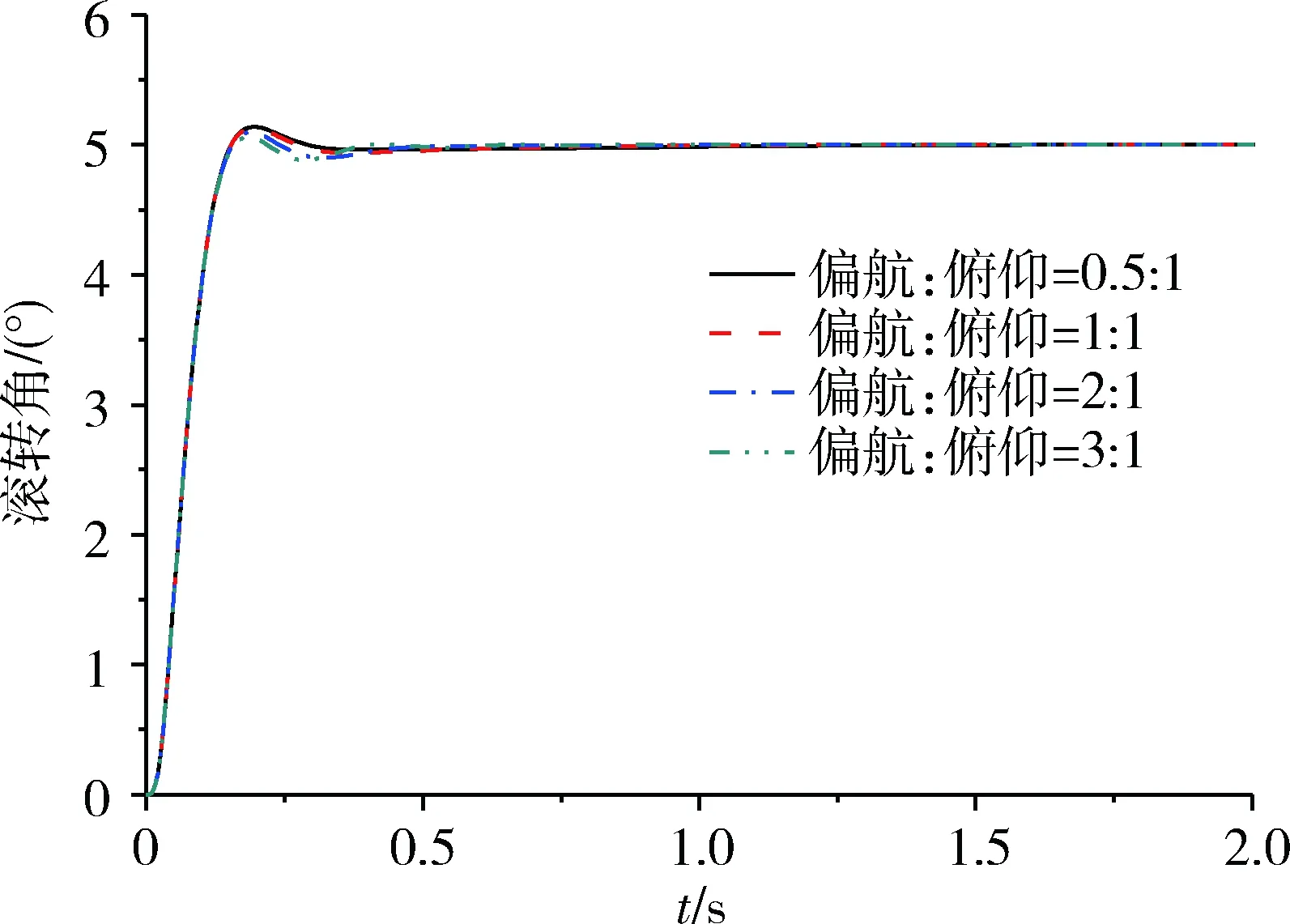
圖16 滾轉角曲線
圖17 滾轉角速度曲線
由圖14~17可知,當滾轉通道響應足夠快時,改變偏航快速性對滾轉通道的影響較小,滾轉角及角速度響應基本保持不變;隨著偏航通道快速性的增加,側滑角收斂速度提高,而過渡過程側滑角最大值有所增加,對俯仰通道過渡過程的影響也將增大。BTT導彈偏航通道升力面較小,彈體頻率較低,存在舵機等滯后環(huán)節(jié)時,偏航駕駛儀頻帶提高受到一定限制,很難達到比俯仰通道更快,因此可以讓偏航通道的快速性與俯仰通道基本相當,實現(xiàn)快速協(xié)調轉彎的同時減小對俯仰通道的影響。
4 結論
基于上述對三通道駕駛儀頻帶匹配特性的分析,可確定三通道駕駛儀的時域及頻域特性,見圖18~ 20。
圖18 三通道時域響應曲線
圖19 三通道開環(huán)幅值特性
圖20 三通道開環(huán)相位特性
基于BTT彈體的飛行控制特性,分析了其三通道控制系統(tǒng)數(shù)學模型的耦合特性及駕駛儀結構,采用三通道獨立設計的思想設計了三通道駕駛儀的相關設計指標參數(shù)。確定三通道控制系統(tǒng)的輸入指令后,研究了三通道駕駛儀的頻帶匹配關系,其結果表明:對于BTT導彈的三通道控制而言,在滿足滾轉通道的穩(wěn)定性要求下,盡量提高滾轉通道頻帶有利于消除通道耦合,應盡量保證滾轉通道的頻帶為俯仰通道的2倍以上;偏航通道應盡量保持與俯仰通道快速性一致,以利于提高BTT導彈的協(xié)調轉彎能力;俯仰通道作為響應制導指令的主通道,在滿足其快速性要求的前提下,可適當放慢其響應速度有利于減小各通道間的耦合作用[7]。
上述研究基于耦合的三通道控制系統(tǒng)數(shù)學模型,考慮了舵機硬件動力學的限制,分析了導彈三通道協(xié)調匹配的頻帶關系,對增強BTT導彈控制系統(tǒng)的魯棒性具有一定的工程指導意義,有利于實現(xiàn)導彈的穩(wěn)定飛行,保證其命中精度。
[1] 張保群, 宋申民, 等. 基于自抗擾控制的BTT導彈自動駕駛儀設計 [J]. 航天控制, 2010, 28(1):46-47.(Zhang Baoqun, Song Shenmin, et al. Bank-to-Turn Missile Autopilot Design Based on Active Disturbance Rejection Control[J]. Journal of Aerospace Control, 2010, 28(1):46-47.)
[2] 王磊, 李強, 夏群利. BTT導彈建模與彈體動力學特性分析 [C]. 第32屆中國控制會議,西安, 2013.
[3] 劉燕斌. 高超聲速飛行器建模及其先進飛行控制機理的研究 [D]. 南京:南京航空航天大學, 2007.
[4] 江燕俊, 等. 高超音速BTT巡航飛行器變結構控制系統(tǒng)設計 [J]. 計算機仿真, 2009, 12(26):54-56(Jiang Yanjun. Design of Variable Structure Control System for Hypersonic BTT Vehicle [J]. Computer Simulation,2009,12(26):54-56.)
[5] 張友安, 楊旭, 崔平遠, 等. 傾斜轉彎飛航導彈的制導與控制問題研究 [J]. 宇航學報, 2000, 21(4):71-75.(Zhang Youan, Yang Xu, Cui Pingyuan, et al. Research of Guidance and Control for BTT Winged Missile [J]. Journal of Astronautics, 2000,21(4):71-75.)
[6] Wen Qiuqiu. Analysis and Design for Missile of Three-loop Autopilot [J]. Journal of Beijing Institute of Technology,2012,21(2):172-178.
[7] 溫求遒, 孫毓凱, 夏群利. BTT控制回路匹配性對制導脫靶量影響研究[J]. 北京理工大學學報, 2014, 3(34):228-229.(Wen Qiuqiu, Sun Yukai, Xia Qunli. Research on Influence to Guidance Miss-distance by BTT Control [J]. Journal of Beijing Institute of Technology, 2014, 3(34): 228-229.)
ResearchontheFrequencyMatchingPerformanceofBTTAutopilots
Li Wei, Wen Qiuqiu, Xia Qunli
Beijing Institute of Technology, Beijing 100081, China
Basedonrationalassumptions,independentmissiledynamicmodelismutuallyestablished,whicheliminatedthecouplingthroughlinearizationstrategy,andthedesignofmissile’sthreechannelautopilotsiscompleted.Onthebasisofthat,threechannelautopilots’closed-loopstepresponse,theamplitudeandphasedomainofopen-loopsystemisobtainedandthreechannelautopilots’frequencymatchingrelationshipandtheeffectontheperformanceofcontrolsystemsarediscussed.Finally,thesimulationresultsshowthatBTTautopilotscanimprovetherollingchannelbandaslongasitsstabilitycanmeettherequirements,whichisusefulforeliminatingthecouplingeffectsamongthreechannelsandenhancingmissile’sabilityofcoordinateturnthatkeepsthefastconsistencyofpitchandyawchannelsassoonaspossibile.
BTTmissile;Autopilot;Frequencymatching;Coordinateturn

TJ765
A
1006-3242(2017)05-0030-07
2017-03-24
李威(1994-),男,云南宣威人,碩士研究生,主要研究方向為飛行器的制導與控制;溫求遒(1982-),男,桂林人,博士后, 碩士生導師,主要研究方向為飛行器的制導與控制;夏群利(1977-),男,遼寧撫順人,教授,博士生導師,主要研究方向為飛行器的制導與控制。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電信科學(2016年10期)2016-11-23 05:11:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52
