基于MATLAB的線性控制系統(tǒng)穩(wěn)定性仿真研究
2017-12-08 10:30:54費旻林懷蔚邢瑋李云海
科技資訊 2017年30期
關鍵詞:仿真
費旻++林懷蔚++邢瑋++李云海

DOI:10.16661/j.cnki.1672-3791.2017.30.034
摘 要:穩(wěn)定性是保證控制系統(tǒng)正常工作的先決條件。為了判斷線性控制系統(tǒng)的穩(wěn)定性,在MATLAB/Simulink仿真環(huán)境下,利用MATLAB軟件中的Simulink模塊組合方式建模,可以準確地創(chuàng)建動態(tài)系統(tǒng)的仿真模型。本文通過實例對線性控制系統(tǒng)進行穩(wěn)定性仿真研究,分析過程簡單、快捷,結果準確可靠,充分體現了MATLAB/Simulink仿真方便和直觀的特點,其創(chuàng)新點在于利用MATLAB/Simulink對線性控制系統(tǒng)進行穩(wěn)定性仿真研究,驗證了其穩(wěn)定理論的有效性和真實性。
關鍵詞:線性控制系統(tǒng) 穩(wěn)定性 MATLAB/Simulink 仿真
中圖分類號:TP391.9 文獻標識碼:A 文章編號:1672-3791(2017)10(c)-0034-03
自動控制系統(tǒng)是由控制器和被控對象按照一定的方式連接起來、完成一定自動控制任務的有機整體,盡管其實現的功能不盡相同,但任何控制系統(tǒng)要使其按照預期目標實現其功能,都必須以系統(tǒng)穩(wěn)定為首要條件。穩(wěn)定性是指系統(tǒng)重新恢復平衡狀態(tài)的能力,它是保證控制系統(tǒng)正常工作的先決條件。理論上判斷一個控制系統(tǒng)穩(wěn)定性的方法有很多,按照傳統(tǒng)方法判斷控制系統(tǒng)的穩(wěn)定性,不但計算工作量大、效率低,而且不夠直觀,缺乏有力的輸出圖形支撐。隨著計算機科學技術的發(fā)展,各種功能強大的系統(tǒng)仿真軟件在自動控制領域得到廣泛應用,其中,最為典型的代表就是MATLAB仿真軟件,它是目前國際最流行、應用最廣泛的科學與工程計算軟件。
Simulink是基于MATLAB框圖設計環(huán)境實現動態(tài)系統(tǒng)建模、仿真和分析的軟件包,是MATLAB中一種可視化仿真工具,被廣泛應用于各種控制系統(tǒng)的建模、仿真和分析中。本文介紹了基于MATLAB/Simulink仿真環(huán)境下,通過單位階躍信號作用,利用仿真實例對線性控制系統(tǒng)進行穩(wěn)定性仿真研究,直接觀察和分析系統(tǒng)個別參數變化對系統(tǒng)穩(wěn)定性的影響,充分體現了利用MATLAB/Simulink實現仿真方便和直觀的特點。其創(chuàng)新點在于利用MATLAB/Simulink對線性控制系統(tǒng)進行穩(wěn)定性仿真研究,驗證了其穩(wěn)定理論的有效性和真實性。
1 線性系統(tǒng)的穩(wěn)定性
1.1 穩(wěn)定性的概念
控制系統(tǒng)能在實際中應用,其首要條件是保證系統(tǒng)穩(wěn)定。原來處于平衡狀態(tài)的系統(tǒng),在受到擾動作用后都會偏離原來的平衡工作狀態(tài),產生初始偏差。所謂穩(wěn)定性,就是在擾動作用消失后,系統(tǒng)能否由初始偏差狀態(tài)回到原來的平衡狀態(tài)的性能。若系統(tǒng)能恢復到原來的平衡狀態(tài),則稱系統(tǒng)是穩(wěn)定的;反之,偏差越來越大,則系統(tǒng)是不穩(wěn)定的。
穩(wěn)定性是系統(tǒng)的固有特性,是擾動消失后系統(tǒng)自身的恢復能力。穩(wěn)定性只由系統(tǒng)本身的結構、參數決定,而與系統(tǒng)的初始條件以及外作用無關。
1.2 線性系統(tǒng)穩(wěn)定的充要條件
線性定常系統(tǒng)的特性可由線性微分方程來描述,而微分方程的解通常就是系統(tǒng)輸出量的時域表達式,它包括穩(wěn)態(tài)分量和暫態(tài)分量兩個部分。穩(wěn)態(tài)分量對應微分方程的特解,與外作用形式有關;暫態(tài)分量對應微分方程的通解,是系統(tǒng)齊次方程的解,它與系統(tǒng)的結構、參數以及初始條件有關,而與外作用形式無關。由上述穩(wěn)定性概念可知,研究系統(tǒng)的穩(wěn)定性,就是研究系統(tǒng)輸出量中暫態(tài)分量的運動形式,這種運動形式完全取決于系統(tǒng)的特征方程式。根據理論推導,線性控制系統(tǒng)穩(wěn)定的充分必要條件是系統(tǒng)特征方程的所有根均為負實數或具有負的實部。
1.3 線性系統(tǒng)的穩(wěn)定判據
根據線性系統(tǒng)穩(wěn)定的充要條件,要判斷一個系統(tǒng)是否穩(wěn)定,需要求出系統(tǒng)特征方程的全部特征根,這對于低階系統(tǒng)容易取得,但對于三階以上高階系統(tǒng),求系統(tǒng)的特征根比較困難。于是,對于高階系統(tǒng),判斷系統(tǒng)穩(wěn)定與否可采用代數穩(wěn)定判據,它只要根據特征方程的系數便可判別出特征根是否具有負實部,從而判斷出系統(tǒng)是否閉環(huán)穩(wěn)定,常用的代數穩(wěn)定判據主要有赫爾維茨穩(wěn)定判據、林納德-齊帕特判據和勞斯判據等。利用代數穩(wěn)定判據還可確定系統(tǒng)個別參數變化對系統(tǒng)穩(wěn)定性的影響,從而給出使系統(tǒng)穩(wěn)定的參數取值范圍。
2 線性控制系統(tǒng)穩(wěn)定性仿真研究
2.1 仿真實例及其穩(wěn)定性判別
2.1.1 仿真實例
在CDIO模式下的“自動控制原理”課程實踐教學實例中,一串級直流電動機速度控制系統(tǒng)結構如圖1所示,其開環(huán)傳遞函數為:
其中,K為開環(huán)放大倍數;T為時間常數;給定時間常數T=0.1s,分析討論輸入單位階躍信號時,不同開環(huán)放大倍數K對系統(tǒng)穩(wěn)定性的影響。
2.1.2 仿真實例的穩(wěn)定性理論判別
從系統(tǒng)的結構可知,系統(tǒng)閉環(huán)傳遞函數:
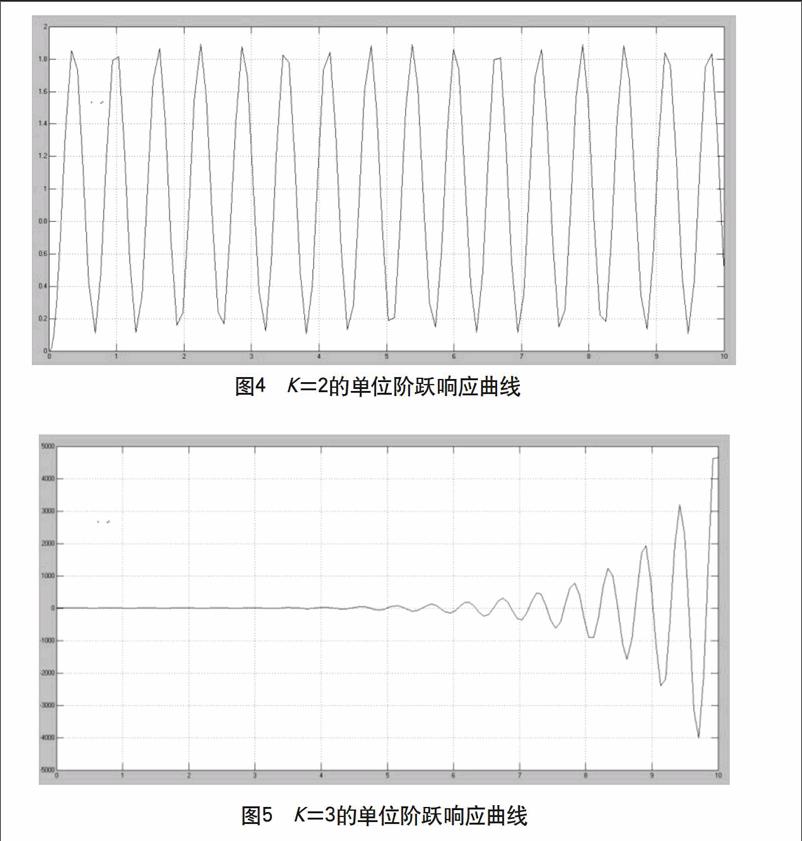
其特征方程為S3+20s2+100s=1000K=0,由勞斯判據易得:1000K>0,且20×100>1000K,聯立求得系統(tǒng)穩(wěn)定時K值的取值范圍為0 可見,閉環(huán)系統(tǒng)的穩(wěn)定性與系統(tǒng)開環(huán)放大倍數K值直接有關。當系統(tǒng)開環(huán)放大倍數K值增大時,系統(tǒng)相對穩(wěn)定性變差;當系統(tǒng)開環(huán)放大倍數K值大于其臨界值時,系統(tǒng)變?yōu)椴环€(wěn)定。 2.2 仿真實例模型構建 啟動MATLAB 7.0.4,進入Simulink仿真界面,在create a new model中繪制控制系統(tǒng)仿真結構圖如圖2所示。根據要求,雙擊各傳遞函數模塊,在出現對話框內設置相應參數,加入單位階躍信號,設置起始時間為0s,對開環(huán)放大倍數K取不同參數值,點擊Simulation菜單下start命令進行仿真,雙擊示波器模塊得到系統(tǒng)輸出響應曲線,觀察、記錄和分析仿真結果。 2.3 仿真結果及分析 (1)根據圖2所示仿真結構,當K=1時,在單位階躍信號作用下,仿真輸出響應曲線如圖3所示,系統(tǒng)開始呈現超調輸出,伴隨時間增加超調輸出逐漸減小直至為0,調節(jié)時間為3s,在0 (2)根據圖2所示仿真結構,當K=2時,仿真輸出響應曲線如圖4所示,系統(tǒng)輸出呈現等幅振蕩,系統(tǒng)為臨界穩(wěn)定狀態(tài),工程上為不穩(wěn)定,仿真結果與理論分析一致。 (3)根據圖2所示仿真結構,當K=3時,在單位階躍信號作用下,仿真輸出響應曲線如圖5所示,系統(tǒng)開始呈現穩(wěn)定狀態(tài),伴隨著時間增加,系統(tǒng)一旦受到外界擾動,輸出變?yōu)榘l(fā)散狀態(tài),在超出0 3 結語 通過對控制系統(tǒng)實例的理論分析和仿真可知,系統(tǒng)開環(huán)放大倍數K值越大,且越接近臨界值,系統(tǒng)相對穩(wěn)定性越差;當系統(tǒng)開環(huán)放大倍數K值大于臨界值,系統(tǒng)變?yōu)椴环€(wěn)定。因此,增大系統(tǒng)開環(huán)放大倍數K值不利于閉環(huán)系統(tǒng)的穩(wěn)定。 基于MATLAB/Simulink仿真環(huán)境下,通過Simulink軟件包所提供的基本模塊,不需任何硬件,在單位階躍信號作用下,利用仿真實例完好地實現了對線性控制系統(tǒng)進行穩(wěn)定性仿真研究,可直接觀察和分析系統(tǒng)輸出性能變化,驗證了其穩(wěn)定理論的有效性和真實性,在控制系統(tǒng)穩(wěn)定性判斷中具有很高的實用價值。 參考文獻 [1] 羅斌,馮輝,唐義鋒.MATLAB軟件在系統(tǒng)穩(wěn)定性分析與仿真中的應用[J].佳木斯大學學報:自然科學版,2010,28(4):530-533. [2] 李素玲.自動控制原理[M].西安:西安電子科技大學出版社,2007. [3] 王正林.Matlab/Simulink與控制系統(tǒng)仿真[M].北京:電子工業(yè)出版社,2005. [4] 李云海,邢瑋,林懷蔚.基于Matlab/Simulink的二階控制系統(tǒng)仿真研究[J].現代電子技術,2013,36(12):12-14. [5] 韓煦,韓玉安.基于Matlab的控壓鉆井壓力控制建模方法[J].石油鉆探技術,2017,45(3):67-71.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49