基于滑模控制的混合動力汽車模式切換控制策略
2017-12-08 23:41:52聞勍鵬楊樹軍唐先智王波
科技資訊 2017年30期
關(guān)鍵詞:仿真
聞勍鵬++楊樹軍++唐先智++王波
DOI:10.16661/j.cnki.1672-3791.2017.30.110
摘 要:為了優(yōu)化混合動力汽車(HEV)仿真模型對目標(biāo)車速的跟蹤問題,以某混合動力汽車為研究對象,以在Matlab/Simulink中已搭建的整車模型為基礎(chǔ),采用多積分滑模的控制策略,建立駕駛員模型。該策略針對混合動力汽車不同的運(yùn)行模式下的需求,分別建立積分滑模面,調(diào)節(jié)發(fā)動機(jī)和電動機(jī)的轉(zhuǎn)矩,用Lyapunov穩(wěn)定性分析方法證明了系統(tǒng)的穩(wěn)定性。分析結(jié)果表明:多積分滑模策略能夠跟蹤目標(biāo)車速,并有效的減少模式切換時(shí)的車速波動。
關(guān)鍵詞:滑模控制 駕駛員模型 車速跟蹤 仿真
中圖分類號:U46 文獻(xiàn)標(biāo)識碼:A 文章編號:1672-3791(2017)10(c)-0110-05
Abstract:In order to optimize the speed tracking of simulation model of hybrid electric vehicle(HEV). Take a HEV which based on vehicle model that have been build up in the Matlab/Simulink as research object. Establish the driver model using multiple integral sliding mode control strategy. Sliding mode surfaces were presented according to the various demands of different operating modes and the torque of engine and motor are adjusted by the control strategy. The stability of the system was proved by Lyapunov method. The result show that sliding mode control strategy could tracking the target speed and reduce the speed fluctuation when switch mode effectively.
Key Words:Sliding mode control; Driver model; Speed tracking; Simulation
環(huán)境污染和能源短缺促使混合動力汽車發(fā)展成為國際汽車工業(yè)競爭的熱點(diǎn)。作為從傳統(tǒng)汽車向純電動汽車過渡的理想產(chǎn)品,混合動力汽車在結(jié)構(gòu)上兼顧了傳統(tǒng)汽車和純電動汽車的優(yōu)點(diǎn),不僅可以滿足駕駛員對動力性和操縱穩(wěn)定性的需求,還能顯著提高汽車的燃油經(jīng)濟(jì)性[1]。由于混合動力汽車的動力系統(tǒng)包含了一系列電子部件和機(jī)械部件,所以對于其動力總成的控制十分復(fù)雜,而且控制過程通常是非線性的。對于兩個(gè)動力源的復(fù)雜動態(tài)系統(tǒng)來講,數(shù)學(xué)模型的建立是搭建整車仿真模型的基礎(chǔ)[2-3]。對前期搭建的整車模型進(jìn)行仿真分析時(shí)發(fā)現(xiàn):混合動力汽車模型在進(jìn)行模式切換時(shí)仿真車速有較大波動,仿真車速難以跟隨目標(biāo)車速。并且在混合動力模式行駛期間,仿真車速出現(xiàn)較大的波動。對發(fā)動機(jī)模型和電動機(jī)模型進(jìn)行觀測時(shí)發(fā)現(xiàn),進(jìn)行模式切換和混合動力模式期間發(fā)動機(jī)和電動機(jī)的轉(zhuǎn)矩有較大波動。由此可以得出,車速的波動與發(fā)動機(jī)和電動機(jī)的轉(zhuǎn)矩計(jì)算和分配有關(guān)。
針對混合動力汽車轉(zhuǎn)矩計(jì)算和分配問題,文獻(xiàn)[4]基于動態(tài)規(guī)劃方法,提出了一種混合動力汽車轉(zhuǎn)矩分配策略;文獻(xiàn)[5]以3個(gè)重要參數(shù)作為目標(biāo)函數(shù),采用正交優(yōu)化方法優(yōu)化發(fā)動機(jī)啟動轉(zhuǎn)矩以及轉(zhuǎn)矩分配比例;文獻(xiàn)[6]首先采用模糊推理識別出駕駛意圖,再根據(jù)駕駛意圖分配發(fā)動機(jī)和電機(jī)的轉(zhuǎn)矩;文獻(xiàn)[7]提出了基于簡化混合動力汽車系統(tǒng)模型的預(yù)測控制智能優(yōu)化策略;文獻(xiàn)[8]利用已知的循環(huán)工況對混合動力汽車模型進(jìn)行預(yù)測,分配發(fā)動機(jī)和電機(jī)轉(zhuǎn)矩。
基于前期仿真的結(jié)果以及出現(xiàn)的問題,本文針對混合動力汽車跟蹤目標(biāo)車速問題,采用了多積分滑模控制策略,分別對發(fā)動機(jī)和電動機(jī)的轉(zhuǎn)矩進(jìn)行計(jì)算和分配,以保證在模式切換時(shí)縱向車速可以有效跟蹤目標(biāo)車速,并且在混合動力模式下,仿真車速可以有效地跟蹤目標(biāo)車速。
1 車輛模型
1.1 車輛動力學(xué)模型
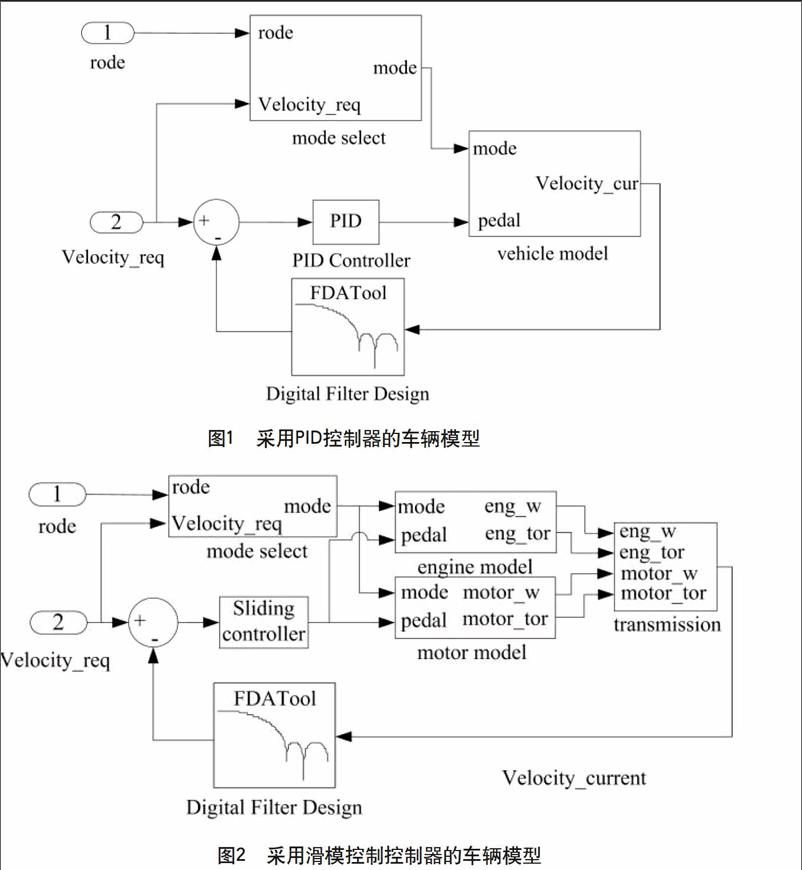
車輛動力學(xué)模型用于模擬車輛在道路上行駛過程中的縱向動力學(xué)特性。駕駛員模型輸出的油門踏板開度信號和制動踏板開度信號作為車輛動力學(xué)模型的輸入信號,車輛動力學(xué)模型的輸出信號是當(dāng)前時(shí)刻的仿真車速。本文采用某中度混合動力乘用車為例進(jìn)行仿真分析,首先建立整車縱向動力學(xué)模型(圖1、圖2):
(1)
式中,F(xiàn)t為驅(qū)動力;為滾動阻力,;m為汽車質(zhì)量;g為重力加速;為滾動阻力系數(shù);θ為道路坡度;,Cd為空氣阻力系數(shù);A為迎風(fēng)面積;ρ為空氣密度;為坡度阻力;ν為當(dāng)前車速;;為加速阻力;Fb為制動器制動力。
考慮發(fā)動機(jī)和車輪的轉(zhuǎn)動慣量,可以得到關(guān)于發(fā)動機(jī)的動力學(xué)公式:
(2)
式中,;為發(fā)動機(jī)曲軸角加速度;為發(fā)動機(jī)輸出轉(zhuǎn)矩;為發(fā)動機(jī)效率;為發(fā)動機(jī)到車輪傳動比;為車輪半徑;為發(fā)動機(jī)轉(zhuǎn)動慣量;為車輪轉(zhuǎn)動慣量。
假設(shè)車輛在行駛過程中沒有縱向滑移,實(shí)際車速也可以由發(fā)動機(jī)曲軸角速度表示:
(3)
1.2 發(fā)動機(jī)和電動機(jī)模型
發(fā)動機(jī)是一個(gè)高度非線性系統(tǒng),難以用準(zhǔn)確的模型來描述其運(yùn)動狀態(tài)。基于發(fā)動機(jī)速度特性的實(shí)驗(yàn)數(shù)據(jù),將發(fā)動機(jī)模型簡化成一階慣性環(huán)節(jié)[9]:
(4)
式中,為發(fā)動機(jī)扭矩;為發(fā)動機(jī)轉(zhuǎn)矩的響應(yīng)時(shí)間常數(shù);為發(fā)動機(jī)穩(wěn)態(tài)轉(zhuǎn)矩特性函數(shù);α為油門開度。endprint
按照同樣的方法,將電動機(jī)也改寫成一節(jié)慣性環(huán)節(jié):
(5)
式中,為電動機(jī)輸出轉(zhuǎn)矩;為電動機(jī)轉(zhuǎn)矩的響應(yīng)時(shí)間常數(shù);為電動機(jī)穩(wěn)態(tài)轉(zhuǎn)矩-轉(zhuǎn)速特性。
在電機(jī)和發(fā)動機(jī)共同驅(qū)動的情況下,為了保證經(jīng)濟(jì)性,需要控制發(fā)動機(jī)工作在最經(jīng)濟(jì)區(qū)間,不足的轉(zhuǎn)矩由電機(jī)補(bǔ)充。根據(jù)發(fā)動機(jī)萬有特性曲線,可以得到發(fā)動機(jī)轉(zhuǎn)速、功率和燃油消耗率三者的函數(shù)關(guān)系:
(6)
式中,為發(fā)動機(jī)燃油消耗率;為發(fā)動機(jī)輸出功率;為發(fā)動機(jī)轉(zhuǎn)速。
(7)
發(fā)動機(jī)轉(zhuǎn)速和車速之間有如下關(guān)系:
(8)
發(fā)動機(jī)輸出功率與輸出轉(zhuǎn)矩存在以下關(guān)系:
(9)
通過公式(6)、(7)、(8)、(9)可以得到發(fā)動機(jī)輸出轉(zhuǎn)矩與油門踏板開度、車速和燃油消耗率之間的關(guān)系:
(10)
發(fā)動機(jī)和電機(jī)共同工作時(shí)總的輸出轉(zhuǎn)矩可以寫成:
(11)
式中,為發(fā)動機(jī)和電機(jī)同時(shí)工作時(shí)總的輸出轉(zhuǎn)矩。
2 控制算法
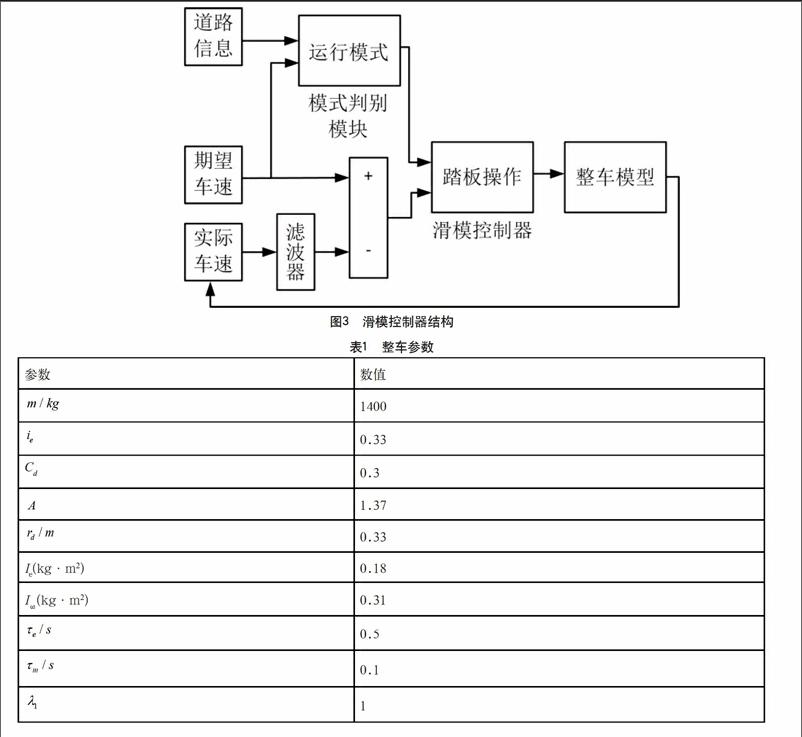
根據(jù)不同的工況,切換混合動力汽車的運(yùn)行模式,通過滑模控制方法控制發(fā)動機(jī)和電機(jī)的輸出轉(zhuǎn)矩,然后結(jié)合期望車速與實(shí)際車速的差值,操縱油門踏板和制動踏板來盡量減小速度的偏差。滑模控制器結(jié)構(gòu)如圖3所示。為了實(shí)現(xiàn)對車速的有效跟蹤,首先定義速度跟蹤誤差為:
(12)
式中,為速度跟蹤誤差;為需求車速。
設(shè)計(jì)滑模曲面函數(shù):
(13)
式中,為滑模面系數(shù)。
如果要達(dá)到理想的動態(tài)滑模控制,需要滿足:
(14)
4 仿真分析
在Matlab/Simulink里搭建混合動力汽車模型,設(shè)計(jì)滑模控制器并進(jìn)行仿真,仿真參數(shù)如表1。在Simulink中給出期望車速和道路信息,仿真結(jié)果如表1所示。
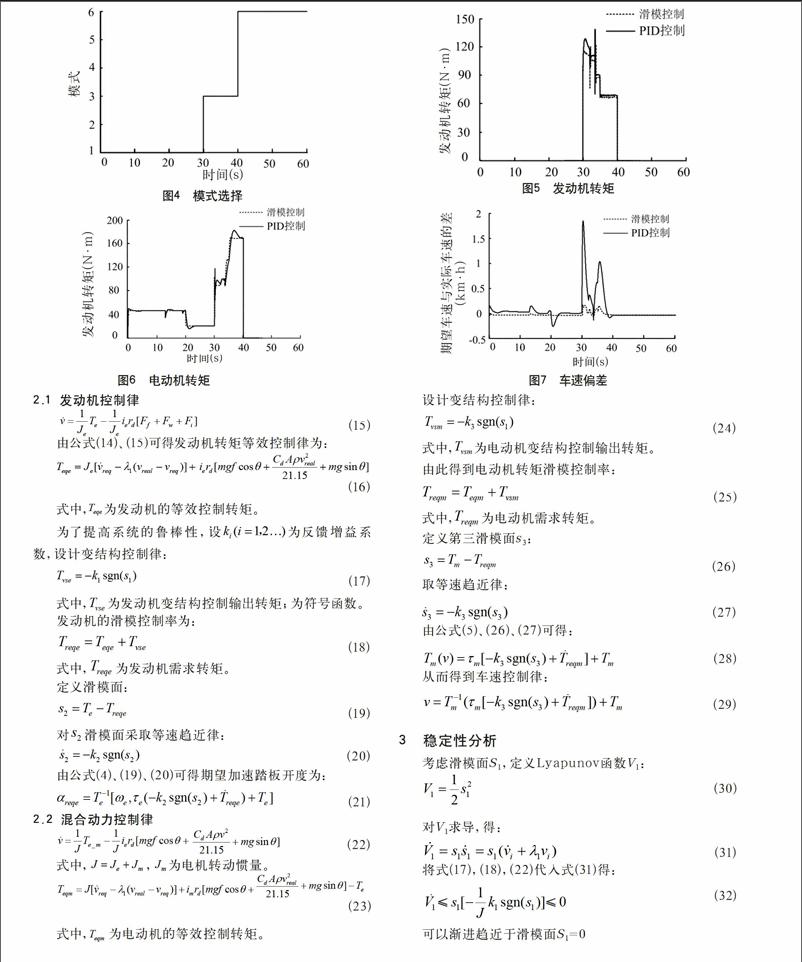
數(shù)字1到6分別代表混合動力汽車的6種行駛模式:電動機(jī)單獨(dú)驅(qū)動、發(fā)動機(jī)單獨(dú)驅(qū)動、電動機(jī)和發(fā)動機(jī)共同驅(qū)動、發(fā)動機(jī)驅(qū)動并帶動發(fā)電機(jī)發(fā)電、緊急制動和再生制動。從圖4可以看出,混合動力汽車在30s時(shí)從電動機(jī)單獨(dú)驅(qū)動切換到電動機(jī)和發(fā)動機(jī)共同驅(qū)動。通過圖5到圖6可以看出,采用滑模控制策略,發(fā)動機(jī)和電動機(jī)的輸出轉(zhuǎn)矩更加平緩。從圖7可以看出,采用滑模控制策略,純電動模式切換到混合動力模式時(shí),期望車速與實(shí)際車速的差達(dá)到0.3km/h,混合動力模式下車速的波動基本維持在0.2km/h以下;而采用PID控制策略,從純電動模式切換到混合動力模式時(shí),期望車速與實(shí)際車速的差達(dá)到2km/h,混合動力模式下車速的波動基本維持在0.5~1km/h之間。由此可見,滑模控制策略有助于減小混合動力模式下的車速波動。
5 結(jié)論
(1)考慮發(fā)動機(jī)和電動機(jī)工作過程中瞬態(tài)響應(yīng)的差別,基于混合動力切換策略,以減小模式切換時(shí)車速波動為目標(biāo),本文設(shè)計(jì)了基于混合動力汽車模式切換策略的滑模控制策略。
(2)在Matlab/Simulink中搭建混合動力汽車整車模型,并對滑模控制策略進(jìn)行仿真驗(yàn)證。仿真結(jié)果表明,與PID控制策略相比,采用滑模控制策略的混合動力汽車在模式切換時(shí)車速波動減少75%。
參考文獻(xiàn)
[1] Powell BK,Bailey KE,Cikanek SR.Dynamic modeling and control of hybrid electric vehicle powertrain system[J].IEEE Control Systems Magazine,1998,18(5):17-33.
[2] Karen L Butler,Mehrdad Ehsani,Preyas Kamath.A Matlab-based Modeling and Simulation Package for Electric and Hybrid Electric Vehicle Design[J].IEEE Transmission on vehicular Technology,1999,48(6):1770-1778.
[3] Koot M,Kessels JT,Jager DB,et al.Energy management strategies for vehicular electric power systems[J].IEEE Transmission on Vehicular Technology,2005,54(3):771-782.
[4] Lin CC,PENG H,Grizzle JW.Control system development for an advanced-technology medium-duty hybrid electric truck[J].SAE,transactions,2003(1):105-113.
[5] 劉凌寶,陳平錄,許靜,等.并聯(lián)型氣動柴油混合動力汽車控制參數(shù)的正交優(yōu)化研究[J].機(jī)械研究與應(yīng)用,2015,28(4):85-87.
[6] 秦大同,楊關(guān)龍,胡明輝,等.基于駕駛意圖的插電式混合動力汽車能量管理策略[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2015,45(6):1743-1750.
[7] 余開江,胡治國,張宏偉,等.混合動力汽車模型預(yù)測控制策略研究[J].系統(tǒng)仿真技術(shù),2014,10(4):273-291.
[8] Yu Kaijiang,Mukai M,Kawabe T.Model predictive control of a power-split hybrid electric vehicle system[J].Artificial and Robotics,2012,17(2):221-226.
[9] 楊陽,李小強(qiáng),蘇嶺,等.重度混合動力汽車工作模式切換控制策略[J].中國公路學(xué)報(bào),2014,27(6):109-119.endprint
猜你喜歡
中國教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價(jià)值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49