基于機械臂的智能小車
2017-12-21 09:30:03張玉政莫琦莫松穎
數字技術與應用 2017年10期
張玉政++莫琦++莫松穎
摘要:隨著科技的日益發達,人類社會正在向自動化,智能化的方向快速發展。由于人的雙手有太多的局限性,比如:人的雙手沒有太多的力量,也不能在高溫、嚴寒、深海、外太空等特殊的環境下工作,而且,隨著高科技時代的發展,凡事早也不是都靠人的雙手來做了。因此設計出機械臂來代替人的手臂也就顯得很有必要。再者,目前大多數機械手臂控制系統不夠完善,控制起來比較繁瑣,要想讓機械手爪到達某一目的地需要好幾個控制指令,又不能通過網絡進行超遠程控制,基于這些問題我們這個團隊打算設計此智能機械手臂,其可以在控制者發出指令后,手機app處理語音指令,然后通過互聯網發送給機械臂小車,小車根據指令與周圍環境自動處理指令并執行相應動作,此過程中便不再人為參與。
關鍵詞:機械臂;控制;信息處理
中圖分類號:TP29 文獻標識碼:A 文章編號:1007-9416(2017)10-0047-02
1 項目實施的目的及意義
通過設計制作遠程可控制機械臂,意在培養大學生的創新動手能力,思考及處理問題的能力,旨在把關于電子信息專業的理論知識轉化為實踐,把理論與實踐相結合才能有效提高我們的綜合素質及能力。近年來隨著互聯網的快速發展,“互聯網+”已經是現代信息社會的潮流,再者,各類傳感器的發展與使用,計算機技術的發展,芯片集成度的提高,使得自動化技術日益成熟并向AI的方向前進,所以我們認為設計這個機械臂小車,以電子信息技術為基礎,通過各類傳感器的應用,并與計算機通信網絡相結合,使得此機械臂小車可在不同的網絡中被語音控制,一來適用于當今自動化控制的技術,第二為以后智能機器人的研究做鋪墊。
2 系統組成
2.1 系統結構
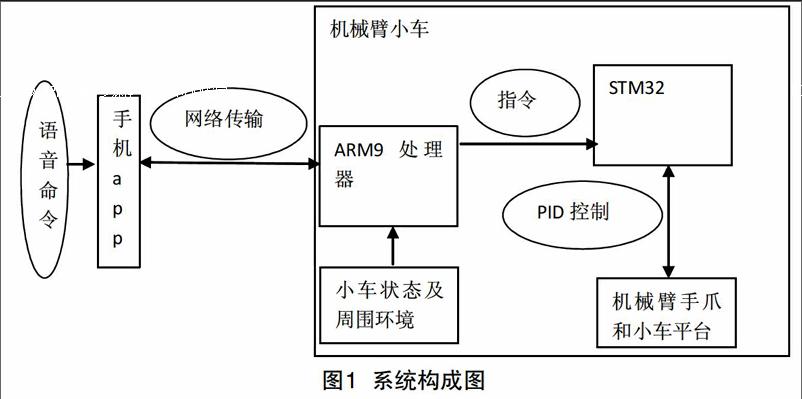
系統由手機app上位機遠程控制部分和機械臂[1]小車兩部分組成,如圖1所示。
硬件系統以小車平臺做底座,一來可以作為一個搭載平臺,二是可以讓機械臂小車來回移動以實現遠程控制機械臂的目的。機械臂和小車平臺的控制系統主要是用stm32核心板來控制,用來控制電機,舵機運行,以及PID的調節[2]。其次是arm9處理器,主要是用來處理信息指令,當手機app通過網絡將語音指令發送給arm9處理器后,處理器便進行語音識別,并翻譯成第二級指令,然后發送給stm32,stm32收到指令后翻譯成機器指令,進而控制機械臂以及小車的動作。再者,當遠距離通信時,我們需要時刻關注小車狀態,這時就需要通過傳感器將小車狀態以及周圍環境實時傳輸給控制者,這是就需要arm9處理器來處理并傳輸這些信息 。
2.2 研究內容
2.2.1 小車平臺PID調節、六方向舵機械手臂控制算法[3]
小車平臺是所有硬件搭建的基礎,因此對于小車平臺的調節使其精確的到達某一地點便很有必要,所以在控制小車平臺時我們就需要其有自動調節能力,目前最簡單且方便的自動控制算法便是PID。
所謂PID調節,其實就是一個閉環自主控制調節[2],其目的是通過算法及程序控制使得小車工作在設計者設計初衷狀態下,我們知道,如果小車在一般情況下工作,電機的參數會不同,電源之間也會有差異,工作環境也不是理想環境,所以,隨著時間的推移,小車行走路徑就會有改變,如此便達不到我們的目的,因此使用PID調節非常有必要,根據電機編碼盤傳輸回來的參數與設定值比較,然后通過比例,積分,微分使得參數值維持與設定值相同,然后再把此參數值輸入到電機中,這樣我們就可以精確控制小車平臺的走向,進而達到預定目的地。
目前PID控制方式一般有兩種:模擬PID控制和數字PID控制[3],由于我們是使用芯片來控制的,屬于數字信號,所以使用的是數字PID控制,其中數字PID控制又包含位置式、增量式算法、積分分離算法、梯形積分算法、模糊算法等,選好一種合適的算法后還要考慮參數的整定。控制器參數整定:指決定調節器的比例系數、積分時間Ti、微分時間Td和采樣周期Ts的具體數值,其實質是通過改變調節器的參數,使其特性和過程特性相匹配,以改善系統的動靜態指標,取得最佳的控制效果。整定調節器參數的方法一般有理論計算整定法和工程整定法,理論計算整定法有對數頻率特性法和根軌跡法,工程整定法有湊試法、臨界比例法、經驗法、衰減曲線法和響應曲線法等,基于我們這個小車平臺,移動速度不會太快,硬件本身穩定性比較好,所以我們使用增量式PID算法,而機械臂去抓取某一物體時,由于物體的不同機械臂的調整也會不同,所以這部分我們采用的是模擬算法,而當小車平臺去實現到某一個指定地點時,只需要判斷方位即可,所以我們采用湊試法來整定參數,機械臂則根據探測器反饋的物體參數利用相應曲線來整定。
舵機是機械臂的主要組成部分,舵機的控制是影響手機械臂性能的重要因素[1],因此,為了精準的操作機械臂,那就需要更好地控制舵機。舵機控制如圖2所示,舵機內部一般是由小型直流馬達、電子控制板、可調電位器、變速齒輪組等組成。
舵機是用PWM信號進行控制的,利用空占比的變化改變舵機轉軸的位置,舵機的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms—2.5ms范圍內的角度控制脈沖部分。如何設計這個脈沖信號進而使舵機發生不同的轉動呢?在這里,我們用stm32單片機作為舵機的控制單元,其原因有:第一,stm32單片機能夠模擬PWM信號,第二,stm32單片機便于與舵機相連接,而且系統穩定,不易受到干擾,它能使PWM信號的脈沖寬度實現微妙級的變化,進而也能提高舵機的轉角精度。stm32單片機完成控制算法,再將計算結果轉化為PWM信號輸出到對應的舵機。其中,stm32單片機系統實現對舵機輸出轉角的控制,必須首先完成兩個任務:首先是產生基本的PWM周期信號;其次是脈沖寬度的調整,即單片機模擬PWM信號的輸出,并且調整占空比。但是如果要機械手臂完成到達某一指定位置的動作,則需要以此控制六個舵機,這樣一來既浪費時間又會導致控制精度不夠。所以為了便于操作者操控,并且體現出其智能一面,我們只需要一條語音指令便能實現操作者目的,這樣,當我們的語音指令發送過來后,arm9處理器便分析此語音指令,其目的是將此語音指令翻譯成能夠控制六個舵機的機器命令,這樣當控制者發送過語音指令后便不再參與此過程,整個過程完全由機器完成,由此,如何只通過一條語音指令轉換成六個機械臂指令變成了最大的問題,而且整個過程為保證機械臂的穩定性,還需要上述的PID調節,因此,在一條語音指令控制機械臂的過程中,為了使機械臂和小車平臺能夠自主分析要抵達位置,我們在小車平臺上安裝了兩個超聲波模塊以及攝像頭模塊,然后數學公式以及圖像處理來分析當前環境,判斷此物體以機械臂小車為基準的偏角,高度,經過arm9處理器處理后,將機械臂將要到達的位置信息發送給stm32,從而能夠精確的到達目的位置。endprint
2.2.2 無線遠程通信的內網間信息通信
遠程人機交互主要利用網絡來實現,語音指令由手機app接收然后app通過網絡將指令發送給小車的arm9處理器;arm9將機械臂周圍的環境以及小車狀態通過網絡返回給操縱者,從而實現數據的交互。其中首先要解決的問題是“兩內網間通信問題”,如何讓兩個處于不同內網的機器通信一直是一個比較難以解決的問題,一般解決的辦法有:使用服務器作為中間媒介,先把信息發送到外網服務器中,然后再由服務器轉發到另一局域網的機器中,或者通過虛擬局域網間接的把兩臺不同局域網的主機連接到同一個局域網中,以實現兩者之間的通信。但是基于目前通信軟件數量極多,所以借用這些通信軟件的服務器便是一個不錯的選擇,我們的解決辦法是使用微信的開源軟件,將我們自己開發的app模塊以插件的方式嵌入到微信中去,再者小車平臺搭載有arm9處理器,其可以上安卓操作系統,所以安裝一個微信軟件也比較容易,以此解決內網間的通信問題。
2.2.3 語音識別
在此項目中我們主要通過控制者的語音信息來操作機械臂小車,但是我們需要遠程控制(實現不同網絡中進行通信控制),所以以硬件設備來實現語音到控制指令的識別轉換并不可取,所以這里我們用自己編寫的app插件來進行語音識別轉換。事先app先把語音信息識別成文字,然后通過網絡把文字信息發送給機械臂小車,機械臂小車接收到文字指令后便轉換成機器指令,最終實現語音控制。
3 結語
機械臂的設計給人們帶來了極大的方便,幫助人們完成非正常條件下人們幾乎無法完成的事情,其應用范圍十分廣泛,比如:工業制造、醫學治療、娛樂服務、軍事上可以排雷,應用于爆破、半導體制造、短距離運輸以及太空探索,深海探索方面可以幫助采集樣品等,而本設計作品主要是幫助大學生了解機械臂的基本知識,培養其創新意識,提高動手能力,學習控制算法PID以及衍生算法,嵌入式開發,網絡以及app編程,語音識別等多項技術。
參考文獻
[1]田海波,馬宏偉,魏娟.串聯機器人機械臂工作空間與結構參數研究[J].農業機械學報,2013,04:196-201.
[2]王琨.提高串聯機械臂運動精度的關鍵技術研究[D].中國科學技術大學,2013.
[3]甘亞輝,戴先中.多機械臂協調控制研究綜述[J].控制與決策,2013,03:321-333.endprint
猜你喜歡
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17
科技視界(2016年20期)2016-09-29 13:07:14
大眾理財顧問(2016年8期)2016-09-28 14:00:43
