直線電機原理及其在精密工作臺中的應用
2018-01-04 02:11:05譚立杰程秀全張永昌
電子工業專用設備 2017年6期
關鍵詞:磁場
張 乾,譚立杰,程秀全,張永昌
(中國電子科技集團公司第四十五研究所,北京 100176)
直線電機原理及其在精密工作臺中的應用
張 乾,譚立杰,程秀全,張永昌
(中國電子科技集團公司第四十五研究所,北京 100176)
激光劃切機能在高速加工情況下切割LED晶圓獲得干凈的斷裂面,形成窄而深的激光劃切槽,要達到這樣的工藝效果就要求激光劃切工作平臺同時具有較高的響應速度、準確的定位精度以及重復精度。首先對直線電機的原理進行研究,根據其外形特點不同進行分類,通過對比為精密工作臺系統選擇合適的直線電機類型,建立動力學數學模型,研究直線電機在精密工作臺系統的應用。
直線電機;動力學模型;精密工作臺;激光劃切機
目前應用于激光劃切設備領域的工作臺普遍采用大理石基座來提高設備的穩定性,以及減小加工震動,由于對精密運動控制的要求尤其高,一般采用直線電機作為承片臺移動的驅動裝置,工作臺采用十字疊加方式,主要由x、y方向運動,所以對x、y方向的直線電機運動控制研究變得尤為重要,這也成為提高激光劃切設備工藝加工成品率的關鍵技術之一。本文針對直線電機的原理和分類進行詳細論述,并進行建模分析,找出直線電機影響運動效果的關鍵因素。
1 直線電機的結構
直線電機的運動形式是沿直線運動,不同于旋轉電機需要螺紋傳動裝置。直線電機由旋轉電機轉化而來,將旋轉電機按其圓柱形徑向橫截面切開,平鋪展成平面結構,就形成了直線電機,如圖1所示。旋轉電機結構是由動子和定子組成,線圈繞組一端的是定子,而中間自由旋轉的一端是動子,由旋轉電機定子展開的一側稱為直線電機初級,由旋轉電機動子展開的一側稱為直線電機次級。可以看出線圈繞組在旋轉電機結構中是定子,固定不動,而在直線電機結構中是初級,可以相對運動。由于直線電機的形成特點,直線電機的初級和次級都可以延伸的很長,到達運動需要達到的任何位置,可以將直線電機的初級或者次級固定,移動次級或初級,實現自由運動,應用到精密工作臺系統的各種場合。
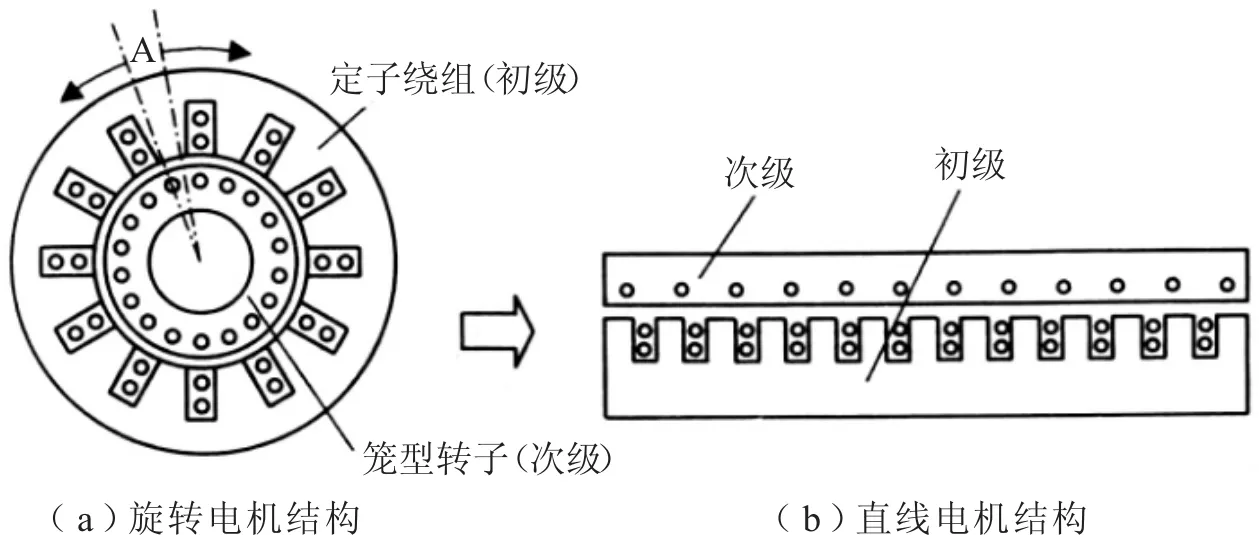
圖1 直線電機的由來
將旋轉電機沿徑向切開展開來的直線電機,它的初級長度和次級長度相等,由于在實際運動中初級和次級的接觸面始終不同,耦合不好,不能進行正常運動。為了讓直線電機在整個行程內的耦合保持不變,初級和次級的長度要不一樣。通常情況下,有兩種形式比較常見,一種初級短次級長,另一種是初級長次級短。
2 直線電機的分類
直線電機根據結構劃分主要分為扁平型、圓筒型、圓盤型和圓弧型。
直線電機根據工作原理劃分可以分為有鐵芯型直線電機和無鐵芯型直線電機,其中無鐵芯型直線電機又稱U型槽電機。
有鐵芯電機將初級銅繞組包在鐵芯的外面,作為施力部件,再將其放在磁軌上,如圖2所示,后側鐵和磁軌之間產生磁通,并循環往復進行,同時后側鐵和磁軌之間的間隙也能夠對電機進行充分散熱,實現快速冷卻。有鐵芯電機的每個鐵芯和繞組單元都有很強的作用力,所以相比有鐵芯電機它的力矩要大很多。
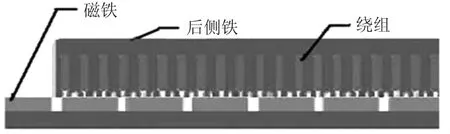
圖2 有鐵芯直線電機
有鐵芯電機的固有結構同時也出現了很多缺點,其中一個缺點是電機的初級施力部件和次級磁軌之間的吸引力太大,這個引力值相當于電機額定作用力的5~13倍。這么巨大的吸引力使得電機的軸承系統必須為該作用力提供有力支撐,否則電機安裝完成后運行一段時間會出現磁軌彎曲變形,嚴重影響工作臺的精度,對于這種有鐵芯的直線電機機械機構設計顯得尤為重要。有鐵芯電機的另外一個缺點是存在齒槽力,利用鐵芯對直線電機施加一個水平力,這樣電機初級線圈繞組就能安置在次級磁軌上的合適位置,這時候會出現齒槽效應,位置不同電機所產生的作用力不同,速度也就不同,這樣在磁軌不同位置的平穩性會有很大區別。
直線電機的線圈繞組放在兩個磁軌之間,線圈繞組中間沒有任何鐵芯,因而稱作無鐵芯電機,又稱為“U型”電機,如圖3所示。有鐵芯電機的銅繞組位于兩排磁軌中間的氣隙內,然后用防水材料包裹起來,由于兩個磁軌和線圈繞組之間互相分離,就不會產生吸引力或齒槽力。
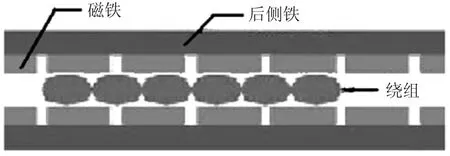
圖3 無鐵芯直線電機
無鐵芯電機中的施力部件的質量比有鐵芯電機中的施力部件質量小,這種結構的整體動態性能好,容易產生很大的加減速度。無鐵芯結構沒有齒槽效應,也沒有吸引力,因此可以增加軸承的使用壽命,在某些情況下還可以使用更小的軸承。無鐵芯電機結構具有出色的動態性能,在運動過程中不會出現齒槽效應,所以功能非常強大,但是它們的散熱效率不如有鐵芯電機。因為接觸面積較小,從繞組底座到冷卻板的導熱通道較長,所以這些電機的滿負載功率較低。此外,為了達到合適的作用力和行程而采用的雙排磁體結構也增加了這個電機的總成本。
3 直線電機的原理
旋轉電機通入U-V-W三相交流電流后,動子和定子之間產生氣隙磁場,根據楞次定律,動子相對于定子就會產生相對的旋轉運動。直線電機的工作原理與旋轉電機相同,當給直線電機通電后,它的初級和次級之間同樣產生氣隙磁場,由于氣隙磁場的作用直線電機的初級和次級之間產生相對運動。在旋轉電機內部產生的磁場叫做旋轉磁場,在直線電機的初級和次級之間產生的磁場叫做行波磁場。直線電機通入三相交流電后,根據楞次定律,在初級線圈中產生磁通,次級金屬板上感應出電流,最后轉變成電磁推力,這樣直線電機的初級和次級之間就會產生相對直線運動。設直線電機次級金屬板上有電阻R和電感L,引起渦流的感應電壓為E,渦流電流和磁通密度按照費來明法則在次級上產生連續的推力F。直線電機初級線圈的兩端斷開,會產生縱向邊端效應,本文中忽略初級邊端效應影響,將三相交流電通入到直線電機初級繞組中,就會產生磁場效應作用于初級和次級,隨著輸入的A-B-C三相交流電流隨時間變化,產生的氣隙磁場也會沿直線移動,移動方向按A-B-C三相交流電流相序方向。行波磁場沿直線方向展開后表現為正弦波分布,它的移動速度稱為同步速度設定為vs,設為三相正弦電流頻率,τ為直線電機電磁極距,則同步速度vs=2f τ,如圖4所示。

圖4 直線電機基本工作原理
直線電機初級繞組線圈中輸入三相交流電流,初級和次級之間產生行波磁場,假設次級為柵形次級,是由無數導條組成的,行波磁場不停切割次級導條,在次級導條中產生感應電動勢,也就會生成次級柵形導條感應電流,它和行波磁場互相作用,初級和次級之間產生電磁推力。但是直線電機次級結構不是由很多導條排列的,大多數是整塊采用金屬板形成。圖5為假想導條中的感應電流及金屬板內電流的分布情況。
直線電機的運動方向控制可以通過改變交流三相電流的方向來實現,也就是說可以調換初級繞組線圈上的任意兩根線,這個原理和旋轉電機的原理相同。三相繞組的相序方向相反,行波磁場的方向也就相反,直線電機也就可以向相反方向運動了。通過交換三相電壓的方式改變電機的移動方向,在現實工程應用中得到了廣泛使用,一般情況下,運動器根據控制器的運動方向要求會自動實現換相操作,實現自動換相。
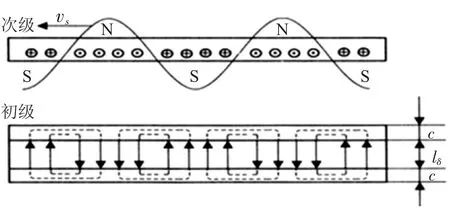
圖5 次級導體中的電流
直線電機采用單邊型結構的無鐵芯電機,將固定在工作臺上的初級成為定子,帶動工作臺自由移動的次級成為動子。直線電機的結構由電機定子、形成均勻磁場的永磁體、動子、直線軸承、剛度相同的雙預壓彈簧、導軌及位移檢測裝置組成。直線電機中電機參數會根據電機的實際使用情況而略顯不同,工作環境中又存在各種電磁耦合,同時定子兩端斷開存在邊端效應,對直線電機建立精確的數學模型是比較困難的事情,為了建立直線電機的數學建模,又能反映數學模型對直線電機的性能,做出如下假設:
(1)假設定子繞組完全對稱,各相繞組的電阻值和匝數相同;
(2)渦流損耗、磁路飽和、磁滯損耗忽略不計;
(3)忽略齒槽效應;
(4)假設氣隙大小恒定,行波磁場恒定,忽略勵磁電流影響;
(5)忽略直線電機的邊端效應;
(6)動子和定子上都沒有阻尼繞組;
(7)假設磁鐵的電導率為零,磁場恒定不變;
(8)直線電機的反電動勢,設為標準正弦波。
直線電機輸入三相交流電,通過電流大小變化來控制直線電機的速度、位置等參數,也就是由輸入動子繞組線圈的電壓U(t)會在繞組線圈回路中產生電流I(t),根據右手定則電流I(t)與磁場之間相互作用產生動子的電磁推力,這樣電機就可以直線運動。將直線電機的運動方程分成三部分組成:分別是線圈回路電壓平衡方程、電磁力方程、動子的力平衡方程。
將直線電機等效為圖6所示電路。
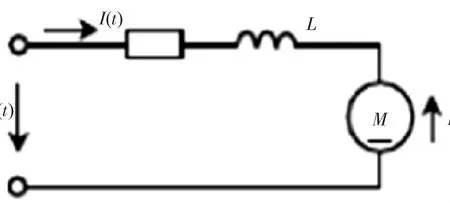
圖6 直線電機等效電路
設R為線圈繞組回路電阻、L為線圈回路電感、E為線圈回路電感以及線圈移動時產生的反電勢,公式(1)為動子線圈繞組的電壓平衡方程:

設電機的電磁力為F(t),km表示電磁力與電樞電流之比,是直線電機的力常數,I(t)為線圈繞組中的電流,則電磁力方程見公式(2):

直線電機的負載一般情況下是動子質量與負載的質量之和,稱為慣性負載。因此將直線電機動子的機械運動簡化為一般機械位移系統,動力學模型為“單自由度的彈簧-質量-阻尼器”,如圖7所示。

圖7 直線電機的動力學模型
則直線電機動子上的力平衡方程見公式(3):

式中,m為直線電機的負載質量,c為阻尼系數,k為彈簧的彈性剛度,x(t)為動子直線位移。
將式(1)、(2)和(3)中消去中間變量 F(t)、I(t)、E,得出以動子直線位移x(t)為輸入量,線圈回路電壓U(t)為輸出量的微分方程見公式(4):


線圈電感L較小,實測值為1.312 mH,電流信號頻率和感抗與此有關,低頻時可以將其忽略不計,則式(4)將變為公式(5):

式中,Tm為電機的機電時間常數,K1、K2為電機的傳遞系數。
機電時間常數Tm是一個非常重要的參數,它的大小將影響直線電機的加速度和減速度性能,機電時間常數Tm越小,系統響應速度越快,越容易達到穩定狀態。Tm見公式(6)所示:

由公式(6)可知,要想提高其響應速度,降低機電時間常數Tm值,可以提高磁通密度Bf。
通過對幾種直線電機的特性分析,選擇激光劃切機工作臺需要的電機類型。從結構上,直線電機類型根據初級和次級的結構不同,選用扁平型直線電機搭建x、y工作臺系統。從原理上,根據初級是否含有鐵芯分為兩類,選用無鐵芯直線電機來避免由于法向吸力造成的導軌彎曲問題。電機采用Akribis的AUM系列直線電機,根據平臺要求工作臺運行速度600 mm/s,經分析確定x軸加速度和減速度為9 m/s2,設行程350 mm,則加減速時間ta=td=0.067 s,x軸負載為35 kg,假設摩擦系數為0.02,則電機驅動負載時所受摩擦力Fd=0.7 N,此時電機所需的
加速力為:Fa=M·a+Fr=35×9+0.7=315.7 N,減速力為:Fd=M·a-Fr=35×9-0.7=314.3 N,則電機輸出的均方根力為:
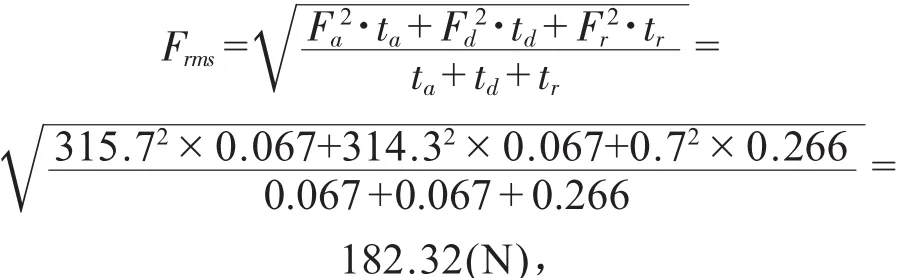
取20%安全余量,計算出持續推力Frms=182.32×(1+0.2)=218.78(N)。
取20%安全余量,計算出峰值推力:Fmax=(Fa,Fd,Fr)max=378.84(N)
經選型確定x軸電機為Akribis公司的無鐵芯直線電機AUM4-S4系列,同理y電機經過選型計算選擇AUM4-S3系列,激光劃切工作臺系統設計為十字疊加工作臺。
4 在精密工作臺中的應用
直線電機在工作臺應用上具有響應快速,速度要求范圍寬,定位精度高,行程長短可以定制,結構簡單、運動穩定、噪聲低等一系列的優勢,是市場應用比較廣闊的電機。由于直線電機的結構是基于旋轉電機形成的,它的伺服運動控制技術也具有伺服旋轉電機的特點。直線電機雖然具有許多旋轉電機沒有的優點但是也存在一些缺點,如:直線電機的初級兩端是斷開的,會產生端部效應,形成不對稱磁場,出現畸變的勵磁電流存在,在運動過程中有波動問題產生;相同規格的直線電機氣隙比旋轉電機的大,這與電氣參數、加工材料及精度等原因有關,效率方面也就略大些,直線電機的成本由于機械加工精度要求高而顯得更高。旋轉電機已經系列化,并得到廣泛應用,直線電機的結構多種多樣,根據應用場合的不同而不同,同時直線電機主要用于一些高端、精密的運動系統中。
在精密半導體設備制造領域,由于半導體設備精密工作臺系統通常要求大行程、高速、高精度的運動特點,采用直線電機是一個比較好的選擇,在半導體光刻、印刷、切割以及化學拋光等各個領域,直線電機都有比較好的表現。
[1]譚立杰.精密工作臺運動控制系統研究[D].北京:北京航空航天大學,2015.
[2]王利.現代直線電機關鍵控制技術及其應用研究[D].杭州:浙江大學,2012.
[3]程陶.基于直線電機的精密定位驅動技術研究[D].哈爾濱:哈爾濱工業大學,2009.
[4]蔣延超.直線電動機的原理及部分應用[J].科技信息,2011(27):78+119.
[5]毛麗青.直線電機在機床領域的應用及發展[J].機械工程師,2006,(10):22-23.
The Principle of Liner Motor and Application in Precision Stage
ZHANG Qian,TAN Lijie,CHENG Xiuquan,ZHANG Yongchang
(The 45thResearch Institute of CETC,Beijing 100176,China)
Laser cutting machine make cutting LED wafer to get clean fracture surface in the high-speed machining,and get laser cutting narrow and deep cracks,to achieve the effect of this process it requires the laser dicing working platform has the advantages of high speed,high precision,rapid positioning features.This paper first introduces the principle and structure,and selects the appropriate motor system.The linear motor features compared with the rotary motor.Linear motor mathematical model is established,which includes dynamic model,The application of linear motor in the system of precision working table is studied.
Linear motor;Dynamic model;Precision working table;Laser cutting machine
TM359.4
B
1004-4507(2017)06-0070-05
2017-09-16
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
