基于情景螢火蟲算法的機器人路徑規劃
2018-01-08 07:48:05羅天洪何澤銀
計算機應用 2017年12期
羅天洪,梁 爽,何澤銀,張 霞
(重慶交通大學 機電與車輛工程學院,重慶 400074)
基于情景螢火蟲算法的機器人路徑規劃
羅天洪,梁 爽*,何澤銀,張 霞
(重慶交通大學 機電與車輛工程學院,重慶 400074)
針對傳統非結構環境下路徑規劃時機器人運動狀態振蕩和適應性差等問題,提出了一種基于情景螢火蟲算法(SGSO)的機器人路徑規劃策略。該算法基于混沌系統的規律性、隨機性和歷遍性以實現初始化,并利用黃金比分割法進行后期優化,以提高種群的多樣性,抑制算法的早熟和局部收斂;同時,引入關于螢火蟲“天敵”的情景理解,改進螢火蟲種群的選擇機制,解決螢火蟲在非結構環境下尋跡過程中的擱淺現象,增強了算法的適應性和魯棒性。四個測試函數的仿真實驗結果表明,所提算法的求解精度、收斂效率優于基本螢火蟲種群優化(GSO)算法;將該算法應用于非結構環境下移動機器人的路徑規劃中,檢測結果表明,基于SGSO的規劃路徑更短,且轉角處更光滑,有效避免了機器人大角度轉向對動力系統造成的額外負荷,驗證了所提算法的可行性和有效性。
螢火蟲群優化算法;路徑規劃;非結構環境;擱淺現象;移動機器人
0 引言
非結構環境存在表面材質性能不均、結構尺寸變化不規律且不穩定、環境信息非固定或不可知等問題,因此機器人在非機構環境中的路徑規劃存在較大的難度。現存的算法中人工勢場法[1]多被運用到非結構環境規劃中的運動,可以實現較低層的實時控制;但該方法易出現局部最優解,并產生死鎖現象。因此,亟需一種算法實現移動機器人在非結構環境中的路徑規劃問題。螢火蟲群優化(Glowworm Swarm Optimization, GSO)[2]算法自提出以來被廣泛應用于機器人軌跡規劃、路徑規劃和全局分布優化等領域;但該算法存在易陷入局部最優解、早熟、精度低等缺點。現有文獻中已有大量分別關于GSO算法或非結構環境下路徑規劃的研究:郁書好等[3]利用混沌系統的規律性、隨機性和遍歷性對GSO進行初始化,提高了算法的求解精度及全收斂效率,并成功用于車輛路徑問題;Liao等[4]通過對螢火蟲的步長選擇方式進行修改,調整了螢火蟲的分布結構,應用到無障礙環境中傳感器分布問題,并有效提高了傳感器的覆蓋率;Marinaki等[5]提出一種基于空間分布優化的螢火蟲算法,通過連續優化的方式解決了存在隨機需求車輛的路徑規劃問題;Zhang等[6]通過對機器人傳感器系統進行優化使機器人對障礙物進行感知,并基于力分布應用到對機器人的控制,實現非機構環境下的平穩行走;于乃功等[7]提出了一種基于梯度守恒假設和局部加權對光流的移動機器人避障策略,抑制光照和噪聲等變量對其影響,實現非結構環境下的無碰撞行走。此外,文獻[8-9]對螢火蟲的選擇機制進行了優化,提高了螢火蟲種群的利用率;文獻[10-12]將GSO算法應用到物理和機械領域,驗證了GSO算法相比其他智能算法的優點。目前將GSO算法運用到非機構環境下進行路徑規劃的研究較少。
本文根據非結構環境的特點,提出一種基于情景螢火蟲算法(GSO algorithm of Scene understanding, SGSO)的路徑規劃策略。該算法引入了螢火蟲“天敵”的概念,解決螢火蟲面對“天敵”時出現的擱淺現象,對螢火蟲的選擇機制進行影響,保障了求解的精度,降低了傳統螢火蟲算法早熟和局部收斂的發生概率;同時引入混沌變量與黃金比分割法則優化螢火蟲種群,增強在算法在應用過程中的自適應性和魯棒性。
1 情景螢火蟲算法
1.1 情景螢火蟲算法原理
GSO算法的原理[10]如下:在多維空間隨機分布N個螢火蟲個體,每個螢火蟲個體帶有定量的熒光素li(t);以概率pij(t)向鄰域集合Ni(t)中選取的較優個體移動。計算出適應函數J(xi(t))所對應值,并重復這一過程直到達到一定的迭代次數,得到問題較優解的位置。
GSO算法一個迭代循環如下所示:
(1)
(2)
(3)
(4)
li(t+1)=(1-ρ)li(t)+γ*J[xi(t+1)]
(5)
其中:rs為個體的最大感識半徑;β為感識半徑變化系數;nt為螢火蟲個體附近鄰域閾值;Ni(t)為螢火蟲個體的鄰域集合;s為螢火蟲個體移動的步長;ρ為熒光素揮發系數,ρ∈(0,1);dij(t)為個體i和個體j之間的距離;γ為用于調節函數值的常數量,可以放縮適應度函數J[xi(t+1)]。
與現有的智能群算法相比較,螢火蟲算法中需調節的參數簡單,且不存在較為繁瑣的進化,易于實現,穩定性高;但收斂速度慢、早熟和求解精度不高等缺陷對搜尋最優解造成一定的影響。
1.2 情景螢火蟲選擇策略
為了增強螢火蟲群的搜索能力,擬加入螢火蟲的“天敵”,并引入參數暗度di(t)以表示螢火蟲對天敵的排斥效果,與基本螢火蟲算法中存在熒光素吸引作用共同作用,綜合模擬螢火蟲在動態環境和未知環境中尋跡的真實過程。
“天敵”對螢火蟲選擇有抑制作用,參數Oi(t)表示螢火蟲鄰域內存在的天敵數量,影響螢火蟲感識半徑的更新,使鄰域內螢火蟲和天敵共同決定螢火蟲的選擇機制。
(6)
其中:dii(t)表示螢火蟲個體i與感識半徑內天敵i所在點之間的距離。為將天敵對于螢火蟲路徑選擇策略的干擾,引入暗度di(t)表示螢火蟲個體i鄰域內天敵對熒光素傳遞的抑制效果,暗度di(t)與天敵數量Oi(t)的關系為:
(7)
若螢火蟲的感識半徑內天敵數量過多或體積過大,螢火蟲易停止搜索,因此設最大暗度dmax,防止感識半徑減小到0。
由于具備了天敵對螢火蟲的刺激作用,個體i向相鄰鄰域中第j只螢火蟲方向移動的概率為:
(8)
加入暗度影響后,選擇機制的概率分布從[0,1]擴展到[-1,1],更利于螢火蟲選取最優解。
1.3 情景螢火蟲種群的優化
為抑制GSO算法中因為隨機初始分布而陷入局部解和早熟收斂的問題,在算法中采用混沌變量[3]作為螢火蟲的初始種群,以提高搜索的遍歷性、隨機性和規律性。前期通過混沌變量進一步提高螢火蟲種群的豐富度和收斂速度,后期通過將適應度較低的螢火蟲個體進行黃金分割優化,解決螢火蟲的“擱淺現象”,保障了求解精度,增強了螢火蟲種群初始位置的質量以提高后期收斂效率。

xn+1=cos(narccosxn)
(9)


(10)
其中:xmax和xmin分別表示螢火蟲個體搜索范圍的閾值。
然后通過黃金比分割法則重新分布后的部分個體依式(9)迭代得到xn+1,將經過二次優化后的螢火蟲和較高熒光素的種群組成螢火蟲的初始種群。
1.4 情景螢火蟲算法的描述
情景螢火蟲算法總的流程如圖1所示,相應步驟描述如下。
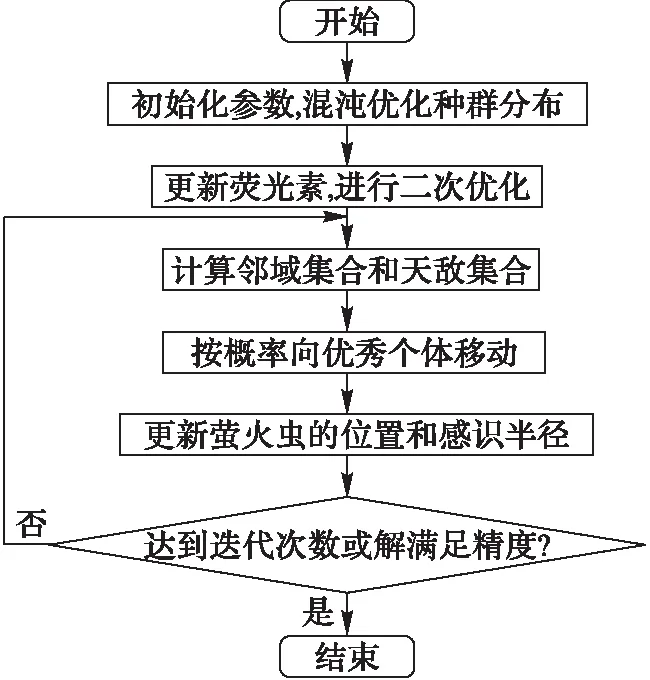
圖1 情景螢火蟲算法流程Fig.1 Flow chart of SGSO
步驟1 初始化ρ、γ、li(0)及其他常量參數。隨機生成D維向量X0=[x0.1,x0.2,…,x0.D],根據式(9)進行第一次優化,依次得到X1,X2,…,XN,將上述N個混沌向量映射到求解區域內。
步驟2 根據式(5)更新螢火蟲種群的熒光素值,篩選出熒光素較低的k個個體,根據式(10)進行二次優化后和一次優化后熒光素較高的部分個體混合組成初始種群。
步驟3 根據式(4)與式(6)分別計算出螢火蟲個體i的鄰域集合Ni(t)和天敵集合Oi(t)。
步驟4 根據式(8)計算出螢火蟲i向鄰域內高熒光素個體j移動的概率。

步驟6 判斷所求解是否滿足條件或者達到最大迭代次數:若滿足條件或達到最大迭代次數即輸出結果;否則轉到步驟3。
2 非結構環境下共融機器人的路徑規劃
2.1 非結構環境中障礙物的識別和分類
機器人在非結構環境中須通過傳感器對工作環境進行感知和識別,提取可能存在的障礙物信息并作出相應的決策以躲避障礙物。為了在復雜工況下保障自身安全,機器人的傳感集成系統多包含不同種類的傳感器。中央控制系統需將各傳感器的信息輸入進行融合以及處理,為機器人的運動進行規劃。
非結構環境下障礙物分布不規律、體積不規則,而障礙物的隨機性往往對移動機器人的運動性能造成影響。因此,對于不同種類障礙物,機器人根據其特點作出相應的避障決策,從而達到路徑規劃的目的。障礙物的分類如表1所示。
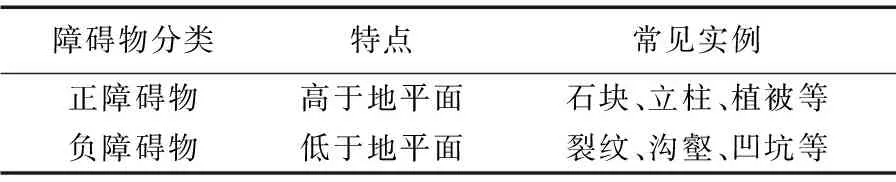
表1 非結構環境中常見障礙物分類Tab. 1 Common obstacle classification in unstructured environment
2.2 非結構環境下路徑規劃的情景理解
傳統路徑規劃的算法在建立模型的過程中,障礙物和機器人的外型通常經過結構化或其他簡化處理,為考慮實際運動過程中由體積因素可能帶來的碰撞或沖擊等不利工況,為了細致地描述環境的特點,更為精確地在算法中模擬障礙物的分布情況,本文算法在確定環境參數的過程中需增加機器人與障礙物的體積對路徑的影響,以再現運動過程中機器人和障礙物之間相對位置關系。
通過關于障礙物各參數的收集與處理,分析機器人可識別范圍內障礙物體積等可增益變量的影響范圍,量化各類障礙物對于機器人路徑選擇策略的影響因子,實現對于障礙物的膨脹保護,保證機器人在運動過程中的安全。
(11)
其中:α表示機器人識別障礙物的展角,rk1表示障礙物k到傳感器最短的距離,rk2表示感知范圍內障礙物k到傳感器最遠的距離,G表示障礙物量化增益系數。根據式(11)對螢火蟲個體感知范圍內的障礙物進行識別和量化。
由于非結構環境具有未知性和不確定性,且目前傳感器的測量與分析水平有限,實際環境中的障礙物和理想模型中的傳感器必然存在一定的誤差。為避免上述測量誤差可能引起的碰撞與跌落現象,引入安全系數s以確保機器人與障礙物之間始終保持一定的間隙,從而保障尋跡過程的穩定性。其中s∈[1.05,1.20]。當環境中障礙物數量較少時,選取較小的安全系數,以減少機器人的移動路徑;當環境中障礙物數量較多時,選取較大的安全系數,以保障運動過程中的無沖撞[13]。
2.3 非結構環境下路徑規劃的目標描述
非結構環境下的路徑規劃就是確定移動機器人從出發點到目標點所經過m+1個點的集合[13],由于非結構環境的障礙存在不確定的因素,機器人的移動路徑應適應于存在各種障礙的環境,因此模型的建立必須不依賴障礙物的任何參數。如圖2所示,以機器人的出發點O與目標點Pm的連線建立X軸,過出發點O且垂直于X軸的直線作為Y軸,建立全局坐標系O-XY。然后將OPm等分成m段,并過每一個等分點作垂線,從而的到垂線族(h1,h2,…,hm-1),而各垂線與路徑的交點即為路徑中部分必須經過的目標點(P1,P2,…,Pm-1)。在不影響結果的前提下,為減小計算量,且便于觀察,將X軸進行平移后提取出新的坐標系。通過上述策略將移動機器人的路徑規劃轉變為一系列目標點的選取過程。
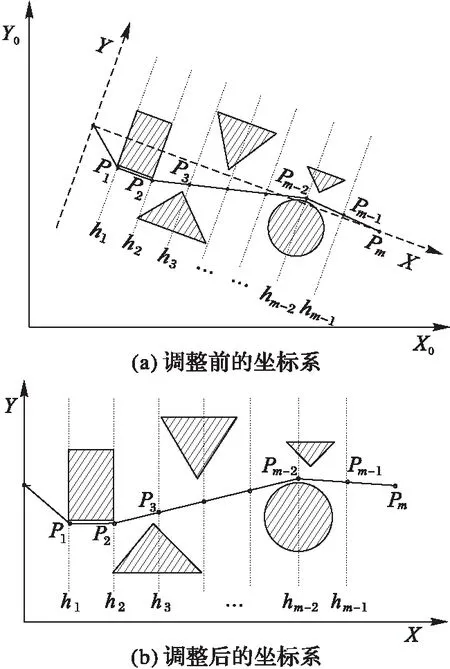
圖2 路徑規劃過程Fig. 2 Process of path planning
為了減小能量的消耗,機器人從起點到終點所經歷總路程應盡量短,即要滿足函數L取最小值。
(12)
其中:LOP1表示點O到點P1間的距離,LPjPj+1表示點Pj到Pj+1間的距離。也可以用坐標表示式(12)為:
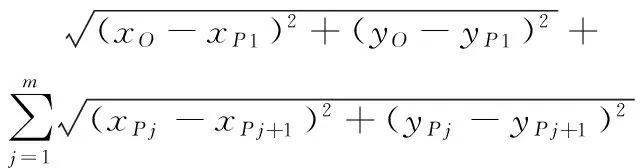
(13)
最終機器人的路徑規劃轉化為對于式(13)的函數在取值范圍內尋找最小的函數值Lmin。通過多次目標轉換,使模型的目標鎖定為最短路程,且適應于非結構環境下障礙物隨機分布的特點。
3 算法性能分析
為了進一步驗證SGSO的有效性,將SGSO與GSO算法、混沌GSO(Chaotic GSO, CGSO)進行性能對比。為方便對比,選取參考文獻[3]中基準測試函數分布進行對比測試。首先對各參數進行初始化,如表2所示。
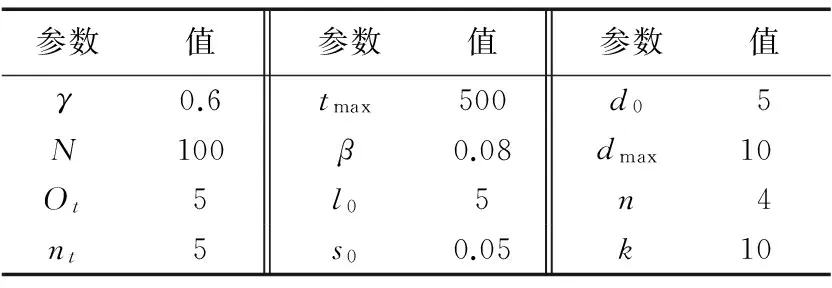
表2 SGSO與GSO算法的初始化參數Tab. 2 Initialization parameters of SGSO and GSO algorithms
具體函數如下:
f1=(|x1|-5)2+(|x2|+5)2;xi∈[-10,10],i=1,2
該函數的全局最小值為25。

x1∈[-5,10],x2∈[0,15]
該函數的全局最優值為0.397 898。

x1∈[-5,10],x2∈[0,15]
該函數的全局最小值為0。
f4=100(x2-x1)2+[6.4(x2-0.5)2-x1-0.6]2;
xi∈[-5,5];i=1,2
該函數的全局最小值為0。
由于單次實驗結果不具有代表性,分別通過GSO算法和SGSO對上述測試函數進行100次運行,并提取出結果中的各項值,如表3。
從表3中的數據可以看出:求解精度方面,通過SGSO所得到4個函數的最差值和平均值皆優于GSO算法和CGSO算法,但函數f3和f4的最優值精度不如CGSO算法;通過GSO算法得出函數f1的最優值與最差值與標準值的差值分別為5.654 9×10-3和3.719 6,而通過SGSO的對應值分別為4.512 3×10-6和1.283 894×10-4,其誤差值相比減小到原來的1/29 060和1/1 253。穩定性方面,SGSO的標準偏差值均低于GSO算法和SGSO,其中,通過SGSO得到函數f3的標準偏差相對GSO算法和SGSO的進一步優化程度較小,但仍提高23%。收斂效率方面,從圖3可以看出,SGSO的收斂曲線中拐點出現較早,都出現于100次迭代之前,收斂速度明顯快于GSO算法;種群分布方面,從圖4可以看出,在函數f1和f3中,SGSO中螢火蟲種群收斂于在最優解的附近,說明改進后的SGSO情景理解模式和選擇機制提高了算法的求解性能。綜上所述,SGSO求解精度較高,穩定性良好,種群分布合理性強,收斂速度快。
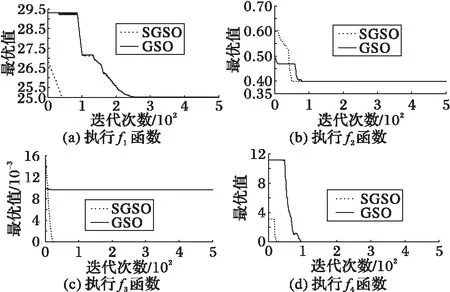
圖3 不同算法執行f1~f4函數收斂對比Fig. 3 Convergence comparison of f1-f4 functions implemented by different algorithms
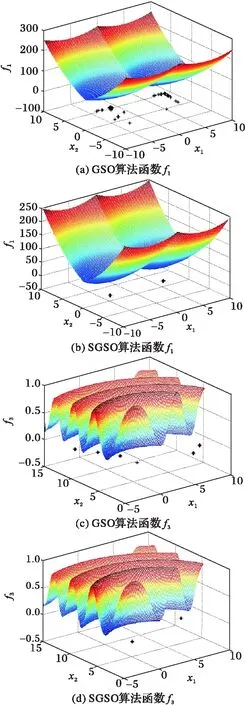
圖4 不同算法函數f1、 f3螢火蟲最終分布Fig. 4 Glowworm final distribution of f1, f3 with different algorithm表3 GSO、CGSO與SGSO函數求解結果Tab. 3 Functional test results of GSO, CGSO and SGSO
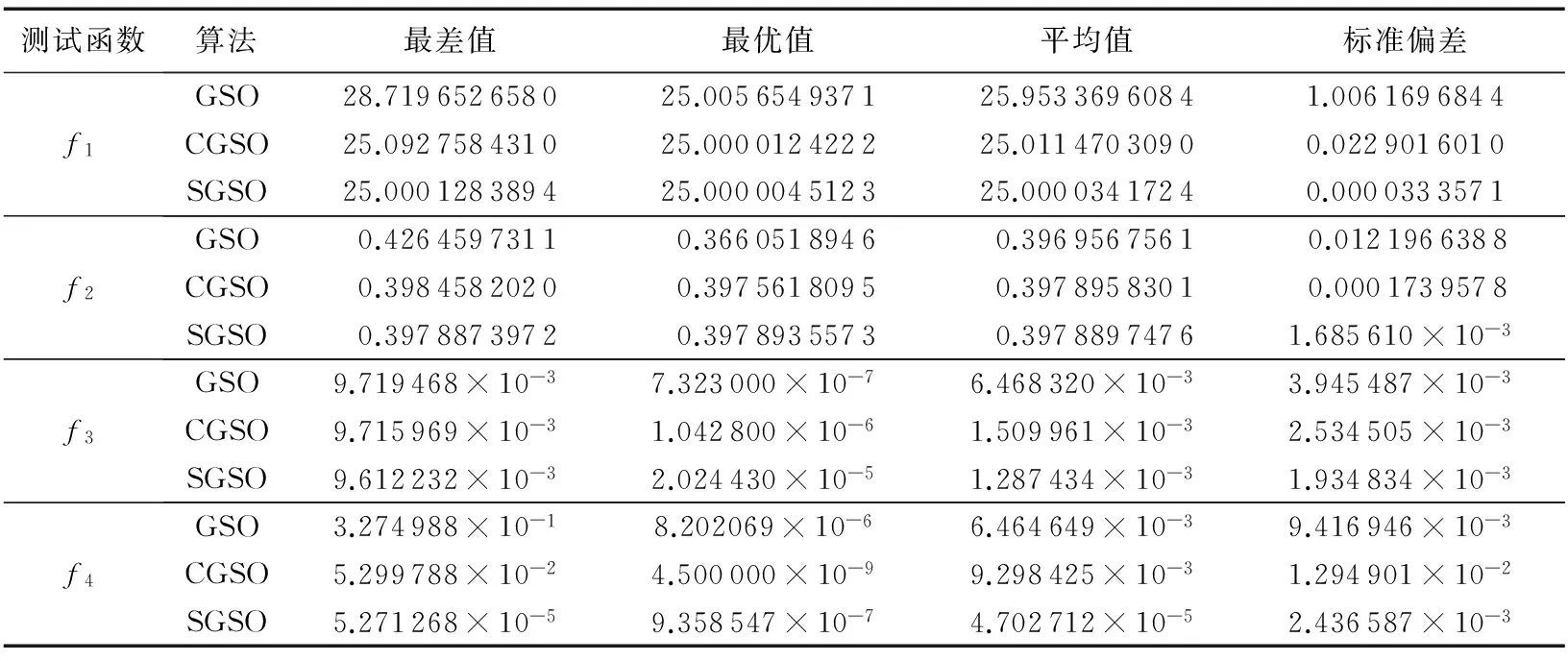
測試函數算法最差值最優值平均值標準偏差f1GSO28.719652658025.005654937125.95336960841.0061696844CGSO25.092758431025.000012422225.01147030900.0229016010SGSO25.000128389425.000004512325.00003417240.0000333571f2GSO0.42645973110.36605189460.39695675610.0121966388CGSO0.39845820200.39756180950.39789583010.0001739578SGSO0.39788739720.39789355730.39788974761.685610×10-3f3GSO9.719468×10-37.323000×10-76.468320×10-33.945487×10-3CGSO9.715969×10-31.042800×10-61.509961×10-32.534505×10-3SGSO9.612232×10-32.024430×10-51.287434×10-31.934834×10-3f4GSO3.274988×10-18.202069×10-66.464649×10-39.416946×10-3CGSO5.299788×10-24.500000×10-99.298425×10-31.294901×10-2SGSO5.271268×10-59.358547×10-74.702712×10-52.436587×10-3
4 SGSO在危橋檢測路徑規劃的應用
本文針對的非結構環境為存在隱患的危橋部分橋面,其模型參數為:截取部分長度L1=8 m,寬度L2=6 m,橋面隨機存在5到9個位置未知、尺寸未知的障礙。為驗證本文算法不受障礙物分布的隨機性的影響,選取6次不同障礙分布的情景分別進行路徑規劃。機器人出發點的坐標為(0,3),計算機器人移動到目標點(8,3)的路徑。通過SGSO對目標函數進行100次優化,在100次優化結果中移動路徑的各類值,從而得出路徑規劃的最優解。
圖5是SGSO在6類不同障礙分布的危橋橋面路徑規劃結果。圖5(a) ~(b)中分別隨機分布了5個障礙物,代表障礙物較少的橋面,結合表4的數據,與GSO算法相比,SGSO的平均路徑分別縮短了0.97%和1.8%;圖5(c) ~(d)中分別隨機分布了7個障礙物,代表障礙物較多的橋面,平均路徑分別縮短了1.2%和1.7%;圖5(e) ~(f)中代表含陷阱障礙物,平均路徑分別縮短了1.9%和2.2%,避開陷阱的成功率為100%。此外,GSO算法生成的路徑在靠近圓形或橢圓形時距離障礙物較近,而靠近直角或銳角障礙時較遠;SGSO生成路徑距離各類障礙的距離具有較好的一致性。
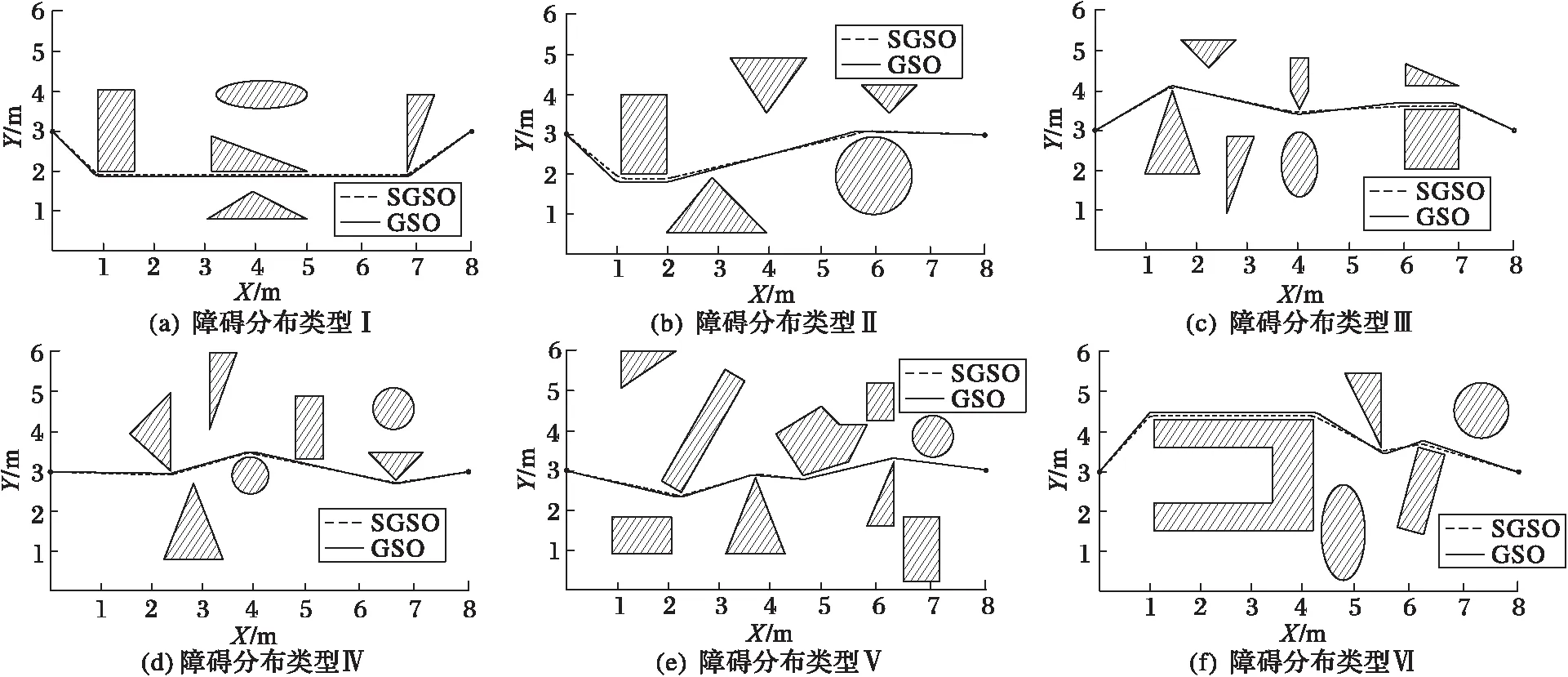
圖5 不同障礙分布類型下不同算法路徑規劃結果Fig. 5 Path planning results of different algorithms under different obstacle distribution types
傳統路徑規劃中機器人的移動路徑多與障礙物相切,本文模型建立的過程中加入了安全系數,優化后的路徑與障礙物之間保持了一定的間隙,該方式使移動距離略有增加,但極大地降低了與障礙物沖撞的概率,提高了運動過程的安全性。為進一步觀察SGSO關于運動效率與避障能力的兼顧性,選取了兩處含尖銳障礙物的局部細節圖,以觀察SGSO的路徑規劃表現,如圖6所示。從圖6中可以看出來,相比通過GSO算法,通過SGSO所生成的路徑在拐點處與障礙物所保持的距離更加穩定,且路徑具備更好的光滑度,減小了機器人過彎的轉角調整,有利于避免機器人運動狀態振蕩。
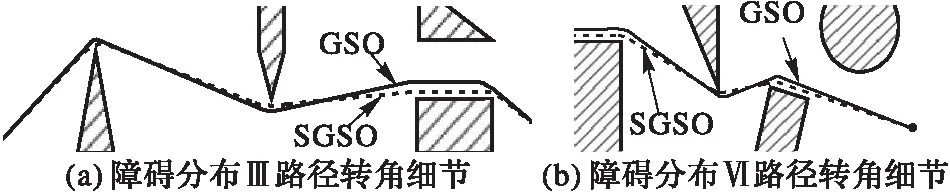
圖6 不同障礙物分布類型下局部路徑細節Fig. 6 Local paths details under under different obstacle distribution types
由于模型的建立不受障礙的位置、性質的影響,GSO算法和SGSO皆可以在障礙物隨機分布的橋面完成移動機器人的路徑規劃。通過數據對比,SGSO的求解精度和迭代穩定性皆高于GSO算法。
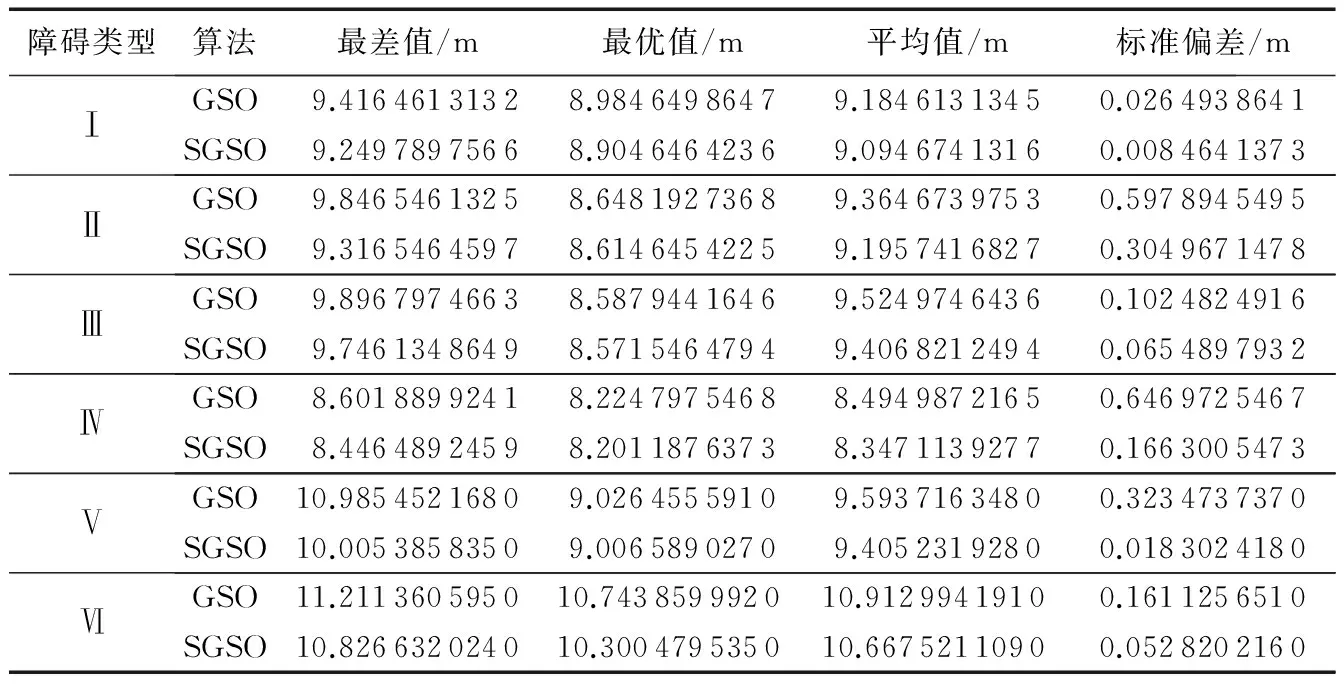
表4 GSO與SGSO算法路徑規劃結果Tab. 4 Path planning results of GSO and SGSO algorithms
5 結語
為克服傳統螢火蟲算法易陷入局部最優解、早熟、精度低等缺點,本文提出情景螢火蟲算法(SGSO),用于在非環境結構下為移動機器人提供可行的路徑規劃策略。該算法基于混沌映射的歷遍性、隨機性和規律性實現種群初始化,通過黃金比分割法優化提高種群的多樣性和機動性,并引入螢火蟲“天敵”的情景理解改善個體的選擇閾值和精度,進化螢火蟲的選擇機制。通過標準函數的仿真實驗及對比分析可知,SGSO比GSO算法及同類算法具備更高的求解精度、穩定性和迭代效率,種群的最終分布位置均收斂于最優解附近;危橋檢測應用的結果也驗證了所提算法的可行性和有效性。
實際的非結構環境具備更多不確定性,下一步將在建模的過程中考慮傳感器的時滯性、測量過程的非線性誤差以及邊界條件的變化,進一步探索SGSO在非結構環境中的理論研究和應用意義。
References)
[1] LI C, JIANG X, WANG W, et al. A simplified car-following model based on the artificial potential field [J]. Procedia Engineering, 2016, 137: 13-20.
[2] KRISHNANAND K N, GHOSE D. A glowworm swarm optimization based multi-robot system for signal source localization [M]// Design and Control of Intelligent Robotic Systems. Berlin: Springer, 2009: 49-68.
[3] 郁書好,蘇守寶.混沌螢火蟲優化算法的研究及應用[J].計算機科學與探索,2014,8(3):352-358.(YU S H, SU S B. Research and application of chaotic glowworm swarm optimization algorithm [J]. Journal of Frontiers of Computer Science and Technology,2014, 8(3): 352-358.)
[4] LIAO W H, KAO Y C, LI Y S. A sensor deployment approach using glowworm swarm optimization algorithm in wireless sensor networks [J]. Expert Systems with Applications, 2011, 38(10): 12180-12188.
[5] MARINAKI M, MARINAKIS Y. Glowworm swarm optimization algorithm for the vehicle routing problem with stochastic demands [J]. Expert Systems With Applications, 2016, 46(C): 145-163.
[6] ZHANG H, LIU Y B, ZHAO J, et al. Development of a bionic hexapod robot for walking on unstructured zerrain [J]. Journal of Bionic Engineering, 2014, 11(2): 176-187.
[7] 于乃功,鄭宇凌,徐麗,等.基于光流的非結構化環境中移動機器人避障方法[J].北京工業大學學報,2017,43(1):65-69.(YU N G, ZHENG Y L, XU L, et al. Optical flow based mobile robot obstacle avoidance method in unstructured environment [J]. Journal of Beijing Universityof Technology, 2017, 43(1): 65-69.)
[8] 劉佳,梁秋麗,王書青,等.基于模擬退火算法的螢火蟲群優化算法研究[J].計算機仿真,2014,31(5):284-288.(LIU J, LIANG Q L, WANG S Q, et al. Research on improved glowworm swarm optimization algorithm based on simulated annealing algorithm [J]. Computer Simulation, 2014, 31(5): 284-288.)
[9] ORAMUS P. Improvements to glowworm swarm optimization algorithm [J]. Computer Science, 2010, 11: 7-20.
[10] 羅天洪,陳才,李富盈.基于時變螢火蟲群算法的冗余機器人手臂逆解[J].計算機集成制造系統,2016,22(2):576-582.(LUO T H, CHEN C, LI F Y. Inverse solution of redundant robot arm based on glow-worm swarm optimization algorithm of time-varying [J]. Computer Integrated Manufacturing Systems, 2016, 22(2): 576-582.)
[11] DING S, AN Y, ZHANG X, et al. Wavelet twin support vector machines based on glowworm swarm optimization [J]. Neurocomputing, 2017, 225(C): 157-163.
[12] CUI H, FENG J, GUO J, et al. A novel single multiplicative neuron model trained by an improved glowworm swarm optimization algorithm for time series prediction [J]. Knowledge-Based Systems, 2015, 88(C): 195-209.
[13] 孫波,陳衛東,席裕庚.基于粒子群優化算法的移動機器人全局路徑規劃[J].控制與決策,2005,20(9):1052-1055,1060.(SUN B, CHEN W D, XI Y G. Particle swarm optimization based global path planning for mobile robots [J]. Control and Decision, 2005, 20(9): 1052-1055, 1060.)
This work is partially supported by the National Natural Science Foundation of China (51375519).
LUOTianhong,born in 1975, Ph.D., professor. His research interests include robotics, mechatronics.
LIANGShuang, born in 1993, M. S. candidate. His research interests include robot dynamics and system control.
HEZeyin, born in 1985, Ph. D.,associate professor. His research interests include mechanical design and theory, mechanical reliability analysis.
ZHANGXia,born in 1982, Ph. D., associate professor. Her research interests include robot control method and theory, exoskeleton motion assisted robot.
Pathplanningofrobotbasedonglowwormswarmoptimizationalgorithmofsceneunderstanding
LUO Tianhong, LIANG Shuang*, HE Zeyin, ZHANG Xia
(SchoolofMechanotronicsandVehicleEngineering,ChongqingJiaotongUniversity,Chongqing400074,China)
Against at the problems of oscillation and poor adaptability of robot motion state in the path planning of traditional unstructured environment, a new path planning strategy based on Glowworm Swarm Optimization algorithm of Scene understanding (SGSO) was proposed. The initialization was realized based on the regularity, randomness and generalization of chaotic systems, and golden section method was used for later optimization, which improved the diversity of the population, suppressed the premature and local convergence of the algorithm. And, by introducing scene understanding of glowworm “natural enemy”, the selection mechanism of glowworm swarm was optimized to solve the grounding phenomenon of glowworm in the process of tracing under unstructured environment, which enhanced the adaptability and robustness of the algorithm. The simulation results of four test functions show that, the proposed algorithm is superior to the basic Glowworm Swarm Optimization (GSO) algorithm in solving precision and convergence efficiency. The proposed algorithm was applied to the path planning of mobile robots in unstructured environment, the test results show that the planning path based on SGSO was shorter and the corner was more smooth, which could effectively avoid the additional load on power system caused by large angle steering of robot, verifying the feasibility and effectiveness of the proposed algorithm.
Glowworm Swarm Optimization (GSO) algorithm; path planning; unstructured environment; grounding phenomenon; mobile robot
2017- 05- 08;
2017- 06- 20。
國家自然科學基金資助項目(51375519)。
羅天洪(1975—),男,四川樂至人,教授,博士,主要研究方向:機器人、機電一體化; 梁爽(1993—),男,重慶人,碩士研究生,主要研究方向:機器人動力學與系統控制; 何澤銀(1985—),男,四川遂寧人,副教授,博士,主要研究方向:機械設計及理論、機械可靠性分析;張霞(1982—),女,重慶銅梁人,副教授,博士,主要研究方向:機器人控制方法與理論、外骨骼運動輔助機器人。
1001- 9081(2017)12- 3608- 06
10.11772/j.issn.1001- 9081.2017.12.3608
(*通信作者電子郵箱137377539@qq.com)
TP391.9;TP242
A
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
中老年保健(2021年12期)2021-08-24 03:30:40
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
