特種電機無傳感器直接轉矩控制研究
2018-01-09 12:39:07崔紅
科技資訊 2017年32期
崔紅

摘 要:高速電機在超高精密加工和高性能機械中的應用越來越廣。本文針對高速永磁電機,建立了高速電機的無傳感器直接轉矩控制仿真模型,應用MATLAB軟件對高速永磁電機無傳感器直接轉矩控制系統進行了仿真。仿真結果表明了無傳感器直接轉矩控制能夠實現高速電機圓形磁鏈軌跡和六邊形磁鏈軌跡的自動切換,為高速電機控制系統應用化實現提供了依據。
關鍵詞:直接轉矩控制 無傳感器控制 圓形磁鏈 六邊形磁鏈
中圖分類號:TM310 文獻標識碼:A 文章編號:1672-3791(2017)11(b)-0011-02
高速電機由于轉速高,電機的功率密度大,動態響應較快等優點目前正在成為國際電工領域的研究熱點之一。
目前對于普通電機控制策略研究的較多,而且很多方法已經實用化[1-2]。要實現高性能的電機控制就要對高速電機進行閉環控制,這就需要檢測電機轉速。對于高速電機等特種電機進行無速度傳感器的研究可以克服使用機械傳感器給調速系統帶來的缺陷。
直接轉矩控制是繼矢量控制之后的一種交流電機高性能控制方法[3]。直接轉矩控制最初在異步電機上得到了應用。近幾年來,該控制方法在永磁電機上已經初步實現,但是對永磁電機直接轉矩控制系統的實際應用還有待于進行進一步研究。
1 高速永磁電機的數學模型
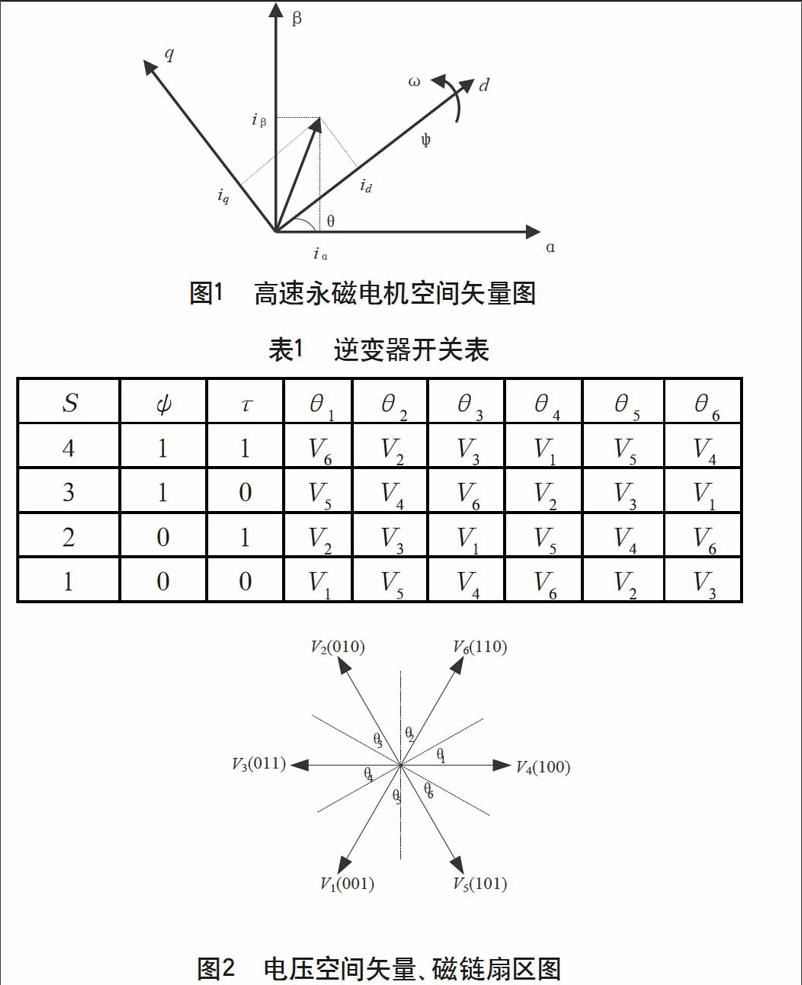
高速永磁電機空間矢量圖如圖1所示,圖中α、β坐標系為定子靜止坐標系,d、q坐標系為轉子旋轉坐標系,d軸與轉子磁鏈方向重合并以同步速度ω逆時針旋轉。兩坐標系之間的夾角為θ。
2 高速永磁電機的無傳感器直接轉矩控制
要實現高性能的電機控制就要檢測電機轉速,但安裝速度傳感器會使系統復雜性增加,可靠性降低,使系統的成本增加、維護要求提高。對于本文所研究的幾萬轉/分鐘的高速永磁電機來說,使用傳感器來不及檢測高速旋轉的電機的速度,因此采用無傳感器技術來估算。
直接轉矩控制以電機的定子轉矩為控制對象,采用空間電壓矢量分析法,直接在定子坐標系上計算與控制電機的轉矩,應用定子磁場定向,借助于離散的兩點式控制,直接對逆變器的開關狀態進行最佳控制。為了實現高性能的控制效果,本文在直接轉矩控制系統中,在低速區(15%額定轉速)采用精度高的圓形磁鏈軌跡控制,在高速區由于開關頻率限制,采用基于六邊形磁鏈軌跡控制[4]。
高速永磁電機的無傳感器直接轉矩控制仿真模型中包括定子磁鏈估算、轉矩估算、速度估算、磁鏈區間的判斷、電流和電壓的3/2變換、圓形磁鏈和六邊形磁鏈模型切換等子模塊。
在低速區直接轉矩控制系統通過電機轉矩誤差狀態τ、磁鏈誤差狀態ψ和磁鏈所在的扇區選擇逆變器的開關信號。逆變器開關表如表1所示。在仿真模型中通過查表來實現。
表中S=2ψ+τ+1。轉矩誤差信號、磁鏈誤差信號分別通過轉矩調節器及磁鏈調節器的滯環控制單元后,獲得0、1控制信號,按上表來選擇電壓空間矢量就可在低速區實現轉矩的快速調節。電壓空間矢量、磁鏈扇區如圖2所示。
在高速區轉矩直接自控制系統通過控制電壓空間矢量的工作狀態與零狀態之間的交替接通,通過控制定子磁鏈走停來控制電磁轉矩,而定子磁鏈的軌跡是正六邊形。
3 系統仿真
本文以負載為Pe=75kW,Ue=500V,ne=60000r/min,fe=1000Hz的高速永磁電機為被控對象,對無傳感器直接轉矩控制系統進行了仿真,在t=0.05s時突加T=3N·m的負載,仿真結果如圖3~圖5所示。
4 結論
通過對高速永磁電機控制系統仿真,可得出:
(1)建立的高速永磁電機的無傳感器直接轉矩控制系統仿真模型能實現圓形磁鏈軌跡和六邊形磁鏈軌跡的自動切換。
(2)轉矩波形與電機所加的負載情況一致,超調量小。
(3)轉速超調量小,跟蹤效果較好。
參考文獻
[1] 顧光旭,鄧智泉.永磁同步電動機兩種矢量控制方式的仿真研究[J].系統仿真學報,2002,14(12):1706-1708.
[2] 鄭黎明,肖禮飛.無速度傳感器永磁同步電機直接轉矩控制系統[J].電力電子技術,2005,39(3):68-70.
[3] 韓崇偉,陳騰飛,李偉,等.永磁同步電機直接轉矩控制技術研究進展[J].微電機,2016,49(1):75-81.
[4] 張春,郭興眾,江明,等.全速范圍直接轉矩控制新型建模與研究[J].電子科技大學學報,2006,35(5):794-797.endprint