改進(jìn)基于INC算法的光伏發(fā)電系統(tǒng)最大功率跟蹤
2018-01-17 14:53:32李文強(qiáng)
電源技術(shù) 2017年12期
關(guān)鍵詞:系統(tǒng)
李文強(qiáng),黎 英,張 軒
(1.昆明理工大學(xué)信息工程與自動(dòng)化學(xué)院,云南昆明650500;2.華北電力大學(xué),河北保定071000)
太陽能具有用之不竭、清潔無污染的優(yōu)點(diǎn),對(duì)于改善環(huán)境和現(xiàn)階段的能源結(jié)構(gòu),具有巨大的優(yōu)勢(shì),對(duì)光伏發(fā)電系統(tǒng)的研究具有重大意義。對(duì)于光伏發(fā)電系統(tǒng)來說,當(dāng)日照強(qiáng)度和環(huán)境溫度發(fā)生變化時(shí),太陽電池板的輸出會(huì)呈現(xiàn)強(qiáng)烈的非線性特性。為實(shí)現(xiàn)太陽能發(fā)電系統(tǒng)在不同的光照強(qiáng)度和環(huán)境溫度下的最大輸出,研究太陽電池陣列的最大功率點(diǎn)跟蹤(maximum power point tracking,MPPT)問題對(duì)提高光伏發(fā)電效率至關(guān)重要。
在不同的外界條件下,光伏電池可運(yùn)行在不同且唯一的最大功率點(diǎn)[1],實(shí)現(xiàn)最大限度地將太陽能轉(zhuǎn)換為電能。國(guó)內(nèi)已
經(jīng)提出了多種MPPT算法,主要有電導(dǎo)增量法、擾動(dòng)觀察法、神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)法、混沌搜索算法、模糊控制算法等等。然而,當(dāng)太陽電池陣列被局部遮擋時(shí),光伏陣列輸出會(huì)呈現(xiàn)多峰值特性。針對(duì)這個(gè)問題,主要有兩種解決途徑,一是結(jié)合常規(guī)算法的復(fù)合MPPT算法,二是采用具有全局最優(yōu)化算法的新型算法。文獻(xiàn)[2-4]提出了基于電導(dǎo)增量法的改進(jìn)算法,該算法將可能出現(xiàn)最大功率的所有電壓設(shè)為參考電壓,并通過對(duì)比此處的最大功率來尋找最大功率;但該算法計(jì)算量大,搜索時(shí)間長(zhǎng),追蹤性能差。文獻(xiàn)[5]提出了新型的混沌搜索算法,該算法利用不同混沌機(jī)制產(chǎn)生的混沌變量作為隨機(jī)步長(zhǎng)進(jìn)行搜索擾動(dòng);但是這種算法輸出有擾動(dòng),震蕩厲害,效率低下。文獻(xiàn)[6]提出了Fibonacci序列法,此方法實(shí)現(xiàn)原理比較復(fù)雜,搜索速度慢,既要提高整個(gè)發(fā)電系統(tǒng)的效率,還要實(shí)現(xiàn)多峰值下的最大功率跟蹤。
對(duì)于局部陰影條件下光伏電池最大功率點(diǎn)跟蹤,現(xiàn)有的算法存在的問題主要有:計(jì)算量大,響應(yīng)時(shí)間慢,追蹤性能差;輸出不穩(wěn)定,有震蕩,具有能量損耗;容易陷入局部最優(yōu)等。本文提出了一種新的搜索算法,通過對(duì)INC算法進(jìn)行改進(jìn),并對(duì)傳統(tǒng)的閥值進(jìn)行限制,使其具有更加突出的追蹤性能,有效地提高了搜索效率和精度,解決了陷于局部最優(yōu)而產(chǎn)生能量損耗的問題。
1 光伏陣列的數(shù)學(xué)模型
光伏陣列通過并聯(lián)和串聯(lián)從而實(shí)現(xiàn)人們預(yù)想的輸出電壓和電流。一組典型的m×n光伏陣列如圖1所示。
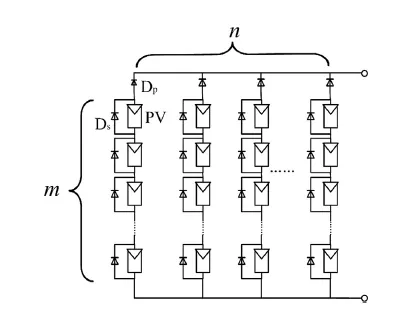
圖1 m×n光伏陣列
為了保護(hù)因局部陰影引起的熱板效應(yīng),在每個(gè)光伏電池的兩端反并聯(lián)上旁路二極管DS;同時(shí),為了防止每組電壓不同引起的電流逆向流動(dòng),加入了二極管DP。與光伏電池的開路電壓和短路電流相比,這些二極管的壓降和電流可以忽略不計(jì)。所以光伏電池的數(shù)學(xué)模型為:
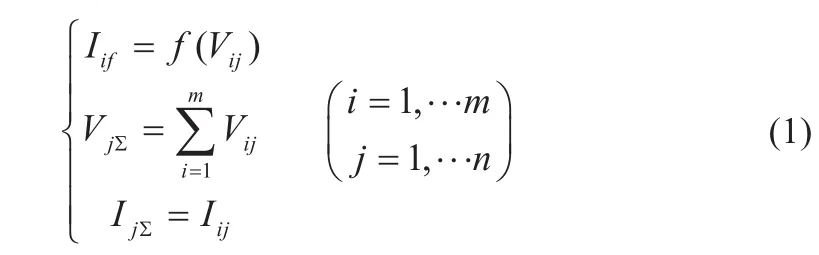
式中:Ii和Vj為光伏電池的輸出電流電壓,Ii=Vj為光伏陣列中第i行第j列電池的輸出特性;由于旁路二極管的存在所以Vij>0;由于每串組件有防逆二極管 DP的存在,所以Iij>0。
數(shù)學(xué)模型可以用分段函數(shù)表示,即:
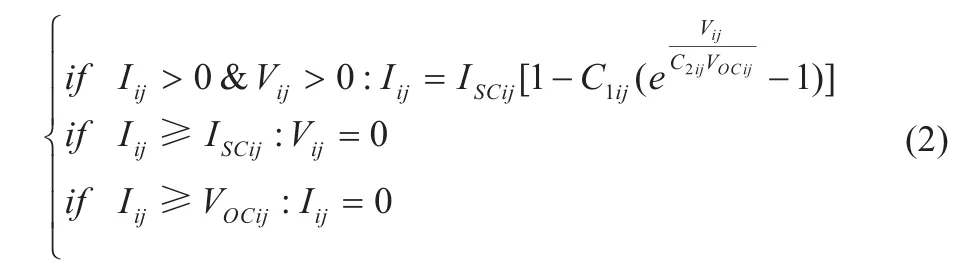
式中:ISCij為第j串第i個(gè)電池的短路電流;VOCij為第j串第i個(gè)電池的開路電壓;C1ij、C2ij的值為:
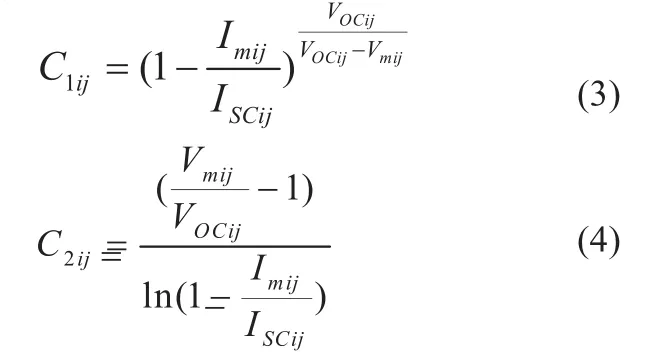
式中:Imij為局部陰影條件下第j串第i個(gè)最大功率處的電流;Vmij為局部陰影條件下第j串第i個(gè)最大功率處的電壓。
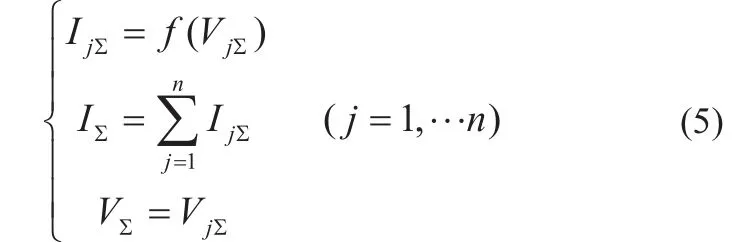
式(1)~式(4)可以總結(jié)為:
標(biāo)準(zhǔn)條件下的光伏模型的仿真結(jié)果如圖2所示,而局部陰影條件下的仿真如圖3所示。從圖3可以看出,存在局部陰影時(shí),光伏模型具有多峰值現(xiàn)象。傳統(tǒng)的最大功率跟蹤方法可以快速有效地尋找到峰值,然而當(dāng)存在多個(gè)峰值時(shí),尋找到的峰值可能是局部峰值,并非全局最優(yōu)值。有些復(fù)雜算法雖然可以找到全局最優(yōu)值,但是跟蹤性能差、效率低[7]。
2 GMPPT控制策略
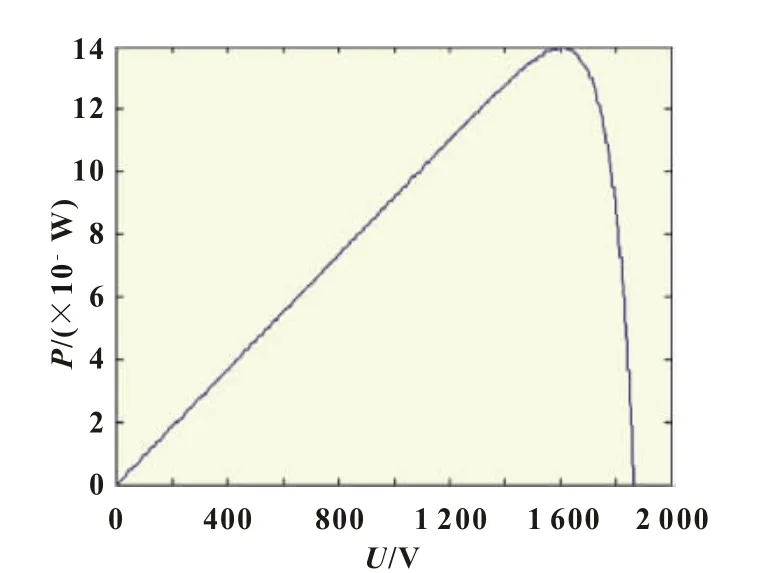
圖2 標(biāo)準(zhǔn)條件下光伏模型的仿真
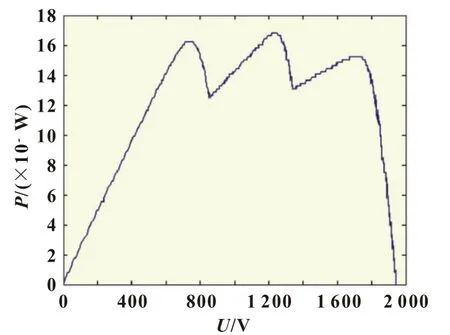
圖3 陰影條件下光伏模型的仿真
建立全局最大功率跟蹤(GMPPT)算法。尋找有可能出現(xiàn)的所有局部最大功率點(diǎn)(LMPP)處,若發(fā)現(xiàn)有極值點(diǎn),則按照常規(guī)P&O法進(jìn)行控制處理;若沒有發(fā)現(xiàn)極值點(diǎn),則跳躍至下一個(gè)可能出現(xiàn)的局部極值點(diǎn)附近,直至完成所有可能局部極值點(diǎn)搜索后,比較LMPP,選出GMPP,并在GMPP處進(jìn)行常規(guī)P&O法進(jìn)行最大功率跟蹤。
然而,該算法可能會(huì)出現(xiàn)以下情況:(1)如果閥值選取過大,會(huì)使得輸出功率值處于峰值的右邊,此時(shí)功率并不是最大功率,根據(jù)算法會(huì)減小電壓,從而使得輸出功率又回到峰值的左邊,此時(shí)輸出功率依然不是最大功率,從而導(dǎo)致輸出不可避免地會(huì)產(chǎn)生振蕩問題,造成功率損失。(2)如果閥值過小,會(huì)使系統(tǒng)不停增加閥值以達(dá)到峰值,實(shí)現(xiàn)輸出最大功率,又或者系統(tǒng)不停減少閥值實(shí)現(xiàn)輸出功率最大的效果。這種情況下雖然精確度相對(duì)較高,但是跟蹤速度慢,響應(yīng)時(shí)間長(zhǎng)。
3 GMPPT算法改進(jìn)
3.1 改進(jìn)的基本思想
針對(duì)傳統(tǒng)的GMPPT控制算法的不足,本文提出了基于全局最大功率區(qū)域的搜索算法(KFC)和增量電導(dǎo)法(INC)的改進(jìn)算法。當(dāng)發(fā)生光伏陣列局部陰影條件改變時(shí),利用KFC法迅速找到LMPP附近,然后利用小步長(zhǎng)的INC法搜索使其停留在GMPP處,為了提高GMPP處的無震蕩輸出和響應(yīng)時(shí)間,對(duì)于INC法采用最優(yōu)的閥值來保證輸出功率的穩(wěn)定。
3.2 KFC搜索算法
在分析了大量仿真和實(shí)驗(yàn)結(jié)果的基礎(chǔ)上,發(fā)現(xiàn)在I-V曲線上的最大功率區(qū)域處V/I約等于VOC/ISC,如圖4所示。VOC和ISC是光伏電池在非陰影條件下的開路電壓和短路電流。圖4顯示出在5種不同陰影條件下的輸出特性,5條I-V曲線與負(fù)載線OM相交A-E,A-E也正好相應(yīng)處于5種陰影條件下的全局最大功率區(qū)域。所以VOC/ISC在搜尋全局最大功率區(qū)域發(fā)揮著巨大作用。
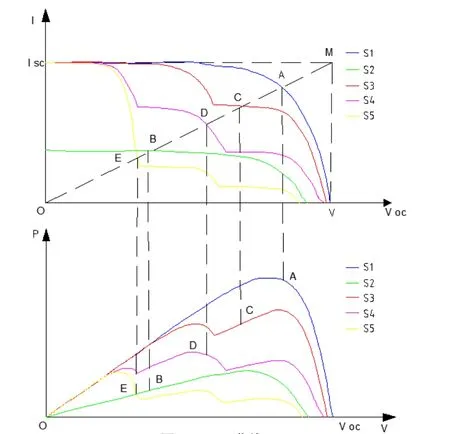
圖4 I-V曲線
如果光伏陰影條件改變了,應(yīng)該立馬改變到VOC/ISC約等于V/I,找到全局最大功率區(qū)域,然后利用傳統(tǒng)的最大功率跟蹤的方法跟蹤最大功率,其流程如圖5所示。
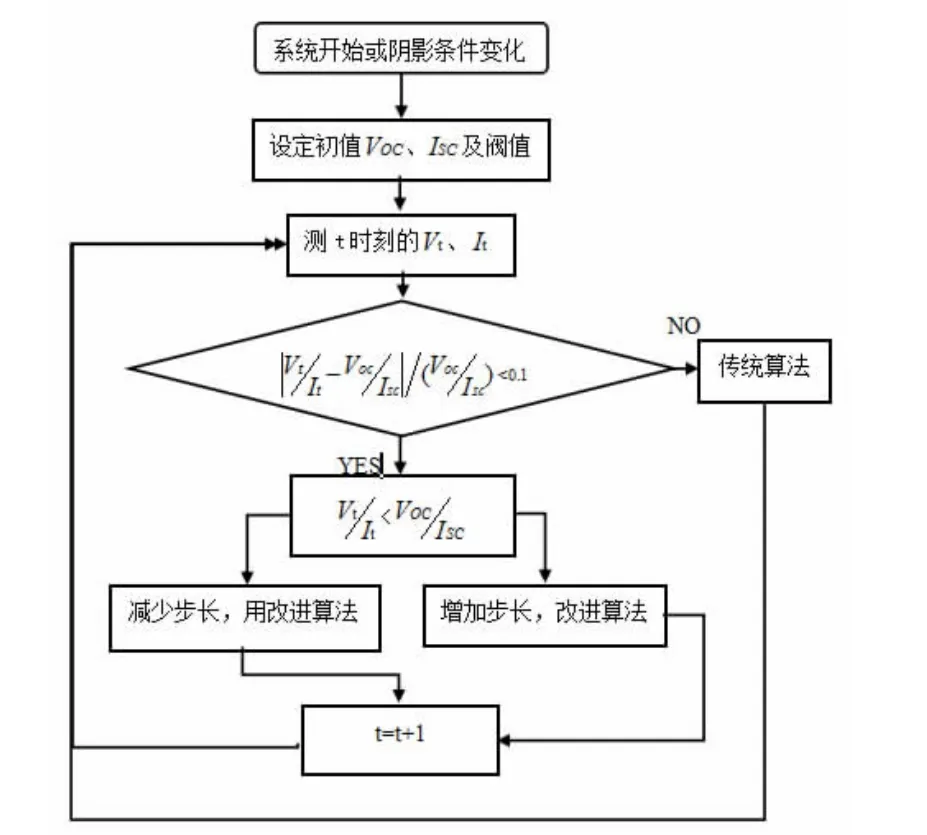
圖5 改進(jìn)算法的流程
3.3 INC的閥值選取
一般INC法的判定條件 (連續(xù)兩次采集電壓差的絕對(duì)值|ΔU|、電流差的絕對(duì)值|ΔI|)在固定的擾動(dòng)步長(zhǎng)下很難保持在MPP處的穩(wěn)定,為了保證準(zhǔn)確性可以將這幾個(gè)判定條件限制在一定范圍內(nèi),而且這幾個(gè)范圍不能太大也不能太小,范圍太大,可能與真實(shí)的MPP誤差太大,范圍太小,就達(dá)不到穩(wěn)定輸出的作用。
圖6給出了閥值取0.5 V時(shí)的仿真效果,可以看出,由于閥值太大,輸出功率震蕩最厲害,系統(tǒng)穩(wěn)定性極差。圖7給出了閥值取0.1 V時(shí)的仿真效果,其輸出具有良好的穩(wěn)定性,但是系統(tǒng)達(dá)到最大值的響應(yīng)時(shí)間較長(zhǎng),系統(tǒng)跟蹤性能較差。圖8給出了閥值取0.2 V時(shí)的仿真效果,此時(shí)系統(tǒng)穩(wěn)定性和響應(yīng)性能都表現(xiàn)優(yōu)良。所以閥值的選取決定了系統(tǒng)輸出的穩(wěn)定性,其值不能太大也不可太小。通過多次實(shí)驗(yàn)對(duì)比選取最合適的閥值,綜合考慮,選取為:|ΔU|≤0.2 V,|ΔI|≤0.02 A。
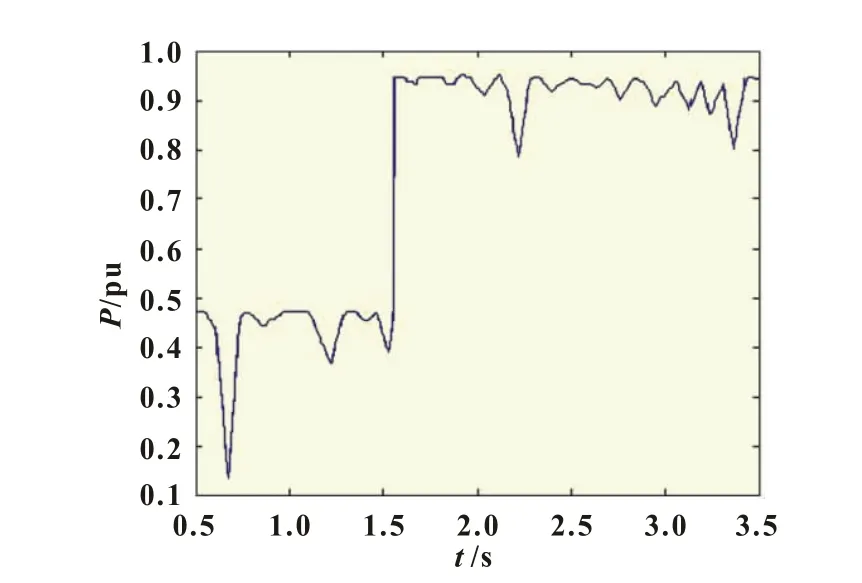
圖6 閥值電壓為0.5 V時(shí)的仿真

圖7 閥值電壓為0.1 V時(shí)的仿真

圖8 閥值電壓為0.2 V時(shí)的仿真
4 實(shí)驗(yàn)與仿真
根據(jù)云電微網(wǎng)實(shí)驗(yàn)系統(tǒng)中15 kW光伏發(fā)電機(jī)組參數(shù),搭建光伏發(fā)電模型(參數(shù)見表1),對(duì)單臺(tái)機(jī)組的光照強(qiáng)度變化時(shí)光伏發(fā)電運(yùn)行特性進(jìn)行仿真分析,仿真結(jié)果如圖9、圖10所示。
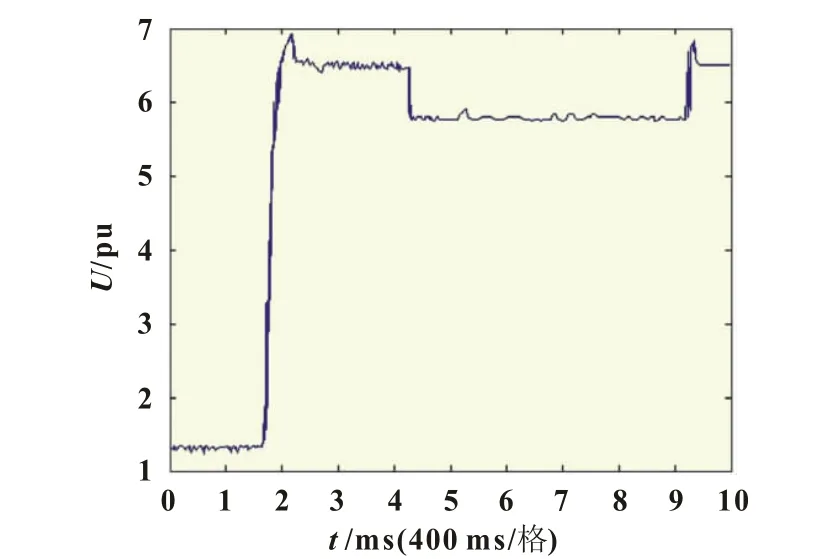
圖9 傳統(tǒng)算法仿真
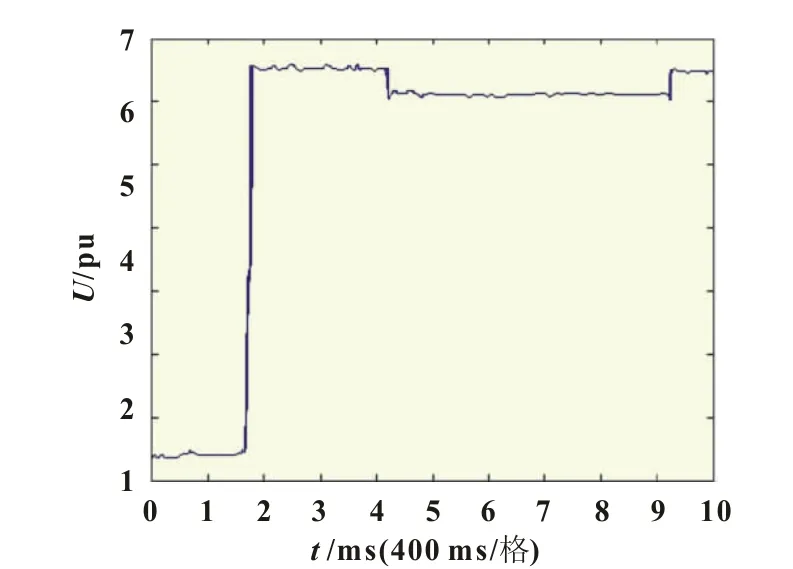
圖10 改進(jìn)算法仿真

表1 光伏發(fā)電參數(shù)
對(duì)圖9、圖10的結(jié)果進(jìn)行對(duì)比可以驗(yàn)證改進(jìn)算法的可行性。(1)陰影條件改變時(shí),本文提出的算法在1 800 ms左右穩(wěn)定在系統(tǒng)最優(yōu)功率6.6 pu處,傳統(tǒng)INC算法卻穩(wěn)定在5.6 pu處,應(yīng)該是陷入局部最優(yōu)值。(2)本文提出的算法用了700 ms的時(shí)間達(dá)到最大功率處,而傳統(tǒng)算法用了900 ms,響應(yīng)速度提高了將近20%,本文算法具有更好的跟蹤性能。(3)對(duì)比圖9、圖10可以看出當(dāng)系統(tǒng)穩(wěn)定在最大功率處時(shí)輸出基本上沒震蕩,具有更穩(wěn)定的輸出,減少了系統(tǒng)震蕩功耗。(4)對(duì)比圖9、圖10可以看出改進(jìn)算法的最大功率比傳統(tǒng)算法的值要大,真正實(shí)現(xiàn)最大功率跟蹤。局部陰影條件下有多個(gè)電導(dǎo)為零即峰值點(diǎn),雖然傳統(tǒng)算法尋找到了峰值但卻不是最大峰值,而KFC算法直接尋找到了所有峰值中的最大峰值,所以改進(jìn)算法避免了陷于局部最優(yōu)的問題。
5 結(jié)論
針對(duì)局部陰影條件下太陽能發(fā)電最大功率跟蹤輸出曲線的多峰值現(xiàn)象,本文提出了基于KFC算法和改進(jìn)的INC算法相結(jié)合的GMMPT控制算法,具有更快的響應(yīng)時(shí)間,能夠?qū)㈨憫?yīng)速度提高將近20%,大大提高了系統(tǒng)的追蹤性能。同時(shí)通過改進(jìn)INC算法的閥值消除了輸出震蕩功耗,具有更穩(wěn)定的輸出,而且解決了陷入局部最優(yōu)的問題。
[1]陸文婷,陳維榮,李奇,等.基于功率預(yù)測(cè)的變步長(zhǎng)擾動(dòng)最大功率跟蹤法[J].電源技術(shù),2014(7):1291-1294.
[2]彭韜,丁坤,劉海皓,等.局部陰影下光伏陣列全局MPPT控制方法[J].可再生能源,2012(7):8-11.
[3]周東寶,陳淵睿.基于改進(jìn)型變步長(zhǎng)電導(dǎo)增量法的最大功率點(diǎn)跟蹤策略[J].電網(wǎng)技術(shù),2015(6):1491-1498.
[4]栗曉政,孫建平.基于分段數(shù)值逼近的自適應(yīng)步長(zhǎng)電導(dǎo)增量法MPPT控制仿真[J].太陽能學(xué)報(bào),2012(7):1164-1170.
[5]陳艷,鄭永.局部陰影下光伏最大功率跟蹤的混沌搜索新算法[J].中國(guó)電機(jī)工程學(xué)報(bào),2013(S1):46-53.
[6]楊飛,惠晶.基于Fibonacci搜索的光伏發(fā)電MPPT控制策略[J].現(xiàn)代電子技術(shù),2009(8):182-185.
[7]朱志宇,原琳,陳迅.遮蔽條件下的光伏陣列最大功率點(diǎn)跟蹤算法[J].電力系統(tǒng)及其自動(dòng)化學(xué)報(bào),2013(4):63-67.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32