立體車(chē)庫(kù)存車(chē)排序問(wèn)題及緩沖車(chē)道控制方案研究
2018-01-18 18:02:56劉亞萍計(jì)三有萬(wàn)會(huì)雄彭繼業(yè)
自動(dòng)化與儀表 2017年6期
關(guān)鍵詞:檢測(cè)
劉亞萍,計(jì)三有,萬(wàn)會(huì)雄,彭繼業(yè)
(武漢理工大學(xué) 物流工程學(xué)院,武漢 430063)
立體車(chē)庫(kù)的有效推廣是目前解決城市 “停車(chē)難”問(wèn)題的一個(gè)重要途徑,國(guó)家發(fā)改委已明確指出將立體停車(chē)設(shè)備作為國(guó)家重點(diǎn)支持的產(chǎn)業(yè)[1]。隨著各城市對(duì)立體車(chē)庫(kù)的需求日益增長(zhǎng),越來(lái)越多的學(xué)者將目光投向這一行業(yè)并取得研究成果。文獻(xiàn)[2]建立了不同存取策略下的時(shí)耗與能耗模,并利用改進(jìn)的遺傳算法實(shí)現(xiàn)了存取策略的優(yōu)化;文獻(xiàn)[3]針對(duì)巷道堆垛式立體車(chē)庫(kù)的存取過(guò)程提出了添加載車(chē)板緩存裝置的改進(jìn)方案,并建立了立體車(chē)庫(kù)在改進(jìn)前后的實(shí)體模型,通過(guò)仿真求解驗(yàn)證了該方案的有效性;文獻(xiàn)[4]給出了立體車(chē)庫(kù)總體控制設(shè)計(jì)方案并開(kāi)發(fā)了對(duì)應(yīng)的管理軟件,并針對(duì)立體車(chē)庫(kù)升降機(jī)構(gòu)的運(yùn)行速度進(jìn)行了參數(shù)優(yōu)化;文獻(xiàn)[5-6]從庫(kù)位路徑選擇上論證了堆垛機(jī)的服務(wù)時(shí)間與庫(kù)位的具體位置有正相關(guān)聯(lián)系,并且給出了多次循環(huán)存取的最短路徑走法的選擇方法;文獻(xiàn)[7-8]分析了立體倉(cāng)庫(kù)倉(cāng)位不同路線的耗時(shí)情況,反應(yīng)了倉(cāng)位遠(yuǎn)近有著不同的耗時(shí)系數(shù)。
在此,針對(duì)巷道堆垛式立體車(chē)庫(kù)高峰時(shí)期排隊(duì)問(wèn)題,合理安排存車(chē)的順序及具體庫(kù)位,利用整數(shù)規(guī)劃方法,以最小化停車(chē)高峰排隊(duì)存車(chē)時(shí)間為目標(biāo),構(gòu)建了相應(yīng)數(shù)學(xué)模型;考慮到停車(chē)高峰的存車(chē)策略對(duì)后續(xù)取車(chē)(高峰)效率的影響,按照庫(kù)存時(shí)間的長(zhǎng)短決定存車(chē)順序的先后,通過(guò)一個(gè)算例驗(yàn)證該模型滿足最小化存車(chē)時(shí)間和取車(chē)時(shí)間,提高低位區(qū)利用率。同時(shí),為了進(jìn)一步提高車(chē)庫(kù)存取效率,減少用戶的排隊(duì)等待時(shí)間,提出了一種基于PLC的立體車(chē)庫(kù)緩沖車(chē)道的控制方案。
1 立體車(chē)庫(kù)存車(chē)排序問(wèn)題
立體車(chē)庫(kù)在停車(chē)高峰期存放的車(chē)輛,在后續(xù)取車(chē)高峰時(shí)期要完成多個(gè)車(chē)主取車(chē)任務(wù),在以往的研究中很少有人考慮存車(chē)高峰期的存車(chē)操作會(huì)影響后續(xù)取車(chē)高峰期的操作效率。為此,在停車(chē)高峰存車(chē)就應(yīng)該考慮后續(xù)取車(chē)高峰取車(chē)情況,即在存車(chē)時(shí)考慮車(chē)輛在后續(xù)取車(chē)高峰需要先后取出的情況。
假設(shè)在停車(chē)高峰時(shí)車(chē)庫(kù)有1個(gè)車(chē)輛集合,該集合的車(chē)輛擬存放到車(chē)庫(kù)庫(kù)位。存車(chē)時(shí),要求滿足車(chē)庫(kù)為單巷道,單出入口,具備單堆垛機(jī)的服務(wù)系統(tǒng)等現(xiàn)實(shí)約束。目標(biāo)是最小化車(chē)庫(kù)在停車(chē)高峰的存車(chē)總操作時(shí)間和后續(xù)取車(chē)高峰的取車(chē)總操作時(shí)間。
在圖1中,圖(a)為停車(chē)高峰時(shí)期在車(chē)庫(kù)排隊(duì)等待的車(chē)輛集合,以方塊表示車(chē)輛,共有6輛車(chē),方塊中數(shù)字為車(chē)輛順序編號(hào),其左邊的數(shù)字按照車(chē)輛預(yù)計(jì)庫(kù)存時(shí)間的從短到長(zhǎng)進(jìn)行編號(hào)排序,右邊的數(shù)字按照車(chē)輛到達(dá)時(shí)間先后進(jìn)行編號(hào)排序;圖(b)為獨(dú)立式單巷道堆垛式單側(cè)庫(kù)位結(jié)構(gòu),共有72個(gè)庫(kù)位。存車(chē)排序問(wèn)題就是研究停車(chē)高峰時(shí)車(chē)庫(kù)待存車(chē)輛按照怎樣的順序分別存放到車(chē)庫(kù)的哪個(gè)庫(kù)位,使得車(chē)庫(kù)存、取車(chē)總等待時(shí)間最短問(wèn)題。
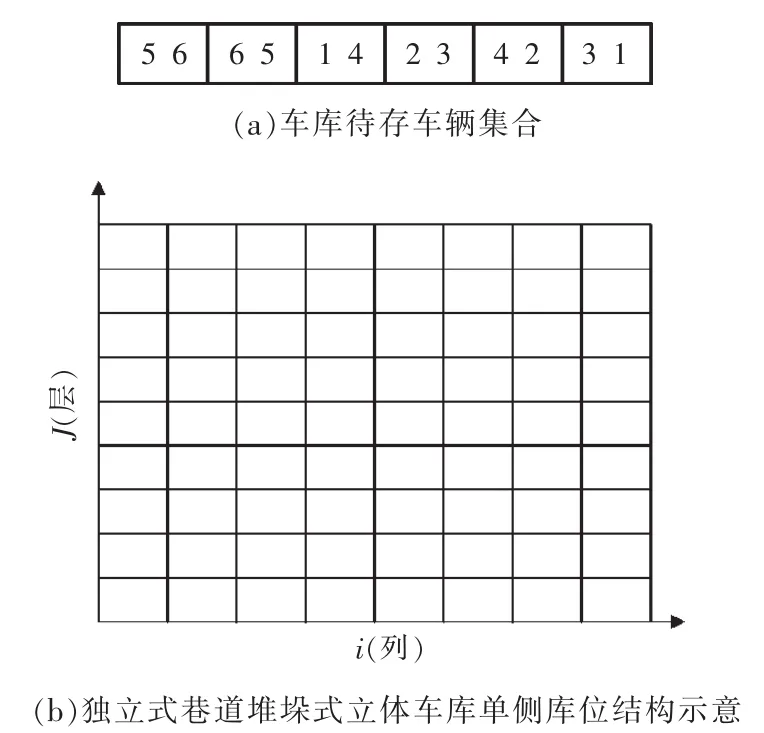
圖1 立體車(chē)庫(kù)存車(chē)排序問(wèn)題示意Fig.1 Schematic of storage sequence problem in a stereo garage
2 立體車(chē)庫(kù)存車(chē)時(shí)間模型建立
2.1 模型假設(shè)
立體車(chē)庫(kù)的各庫(kù)位尺寸規(guī)格相同,并且存放車(chē)輛尺寸都滿足立體車(chē)庫(kù)泊車(chē)位所要求的最大尺寸;規(guī)定每個(gè)庫(kù)位能且只能存放一輛車(chē);本模型研究對(duì)象為單巷道,單出入口,單堆垛機(jī)的獨(dú)立式立體車(chē)庫(kù);以就近分配的原則進(jìn)行庫(kù)位分配即每次存放的車(chē)輛首先從剩余空閑的車(chē)位中選取出存取車(chē)操作時(shí)間最短的庫(kù)位,但若時(shí)間相同時(shí),考慮能耗則選取距離出入口最近的庫(kù)位;堆垛機(jī)在停車(chē)高峰采取停車(chē)優(yōu)先的策略,且以同步運(yùn)行的方式運(yùn)動(dòng);因?yàn)閷⒋孳?chē)輛存放到庫(kù)位的過(guò)程,在車(chē)輛到達(dá)車(chē)庫(kù)入口之前包括從隊(duì)列到緩沖車(chē)道的時(shí)間以及在緩沖車(chē)道上的時(shí)間,幾乎是固定不能再進(jìn)行優(yōu)化的,故假設(shè)其存車(chē)操作時(shí)間為將車(chē)輛從車(chē)庫(kù)入口放到庫(kù)位上的時(shí)間;考慮到經(jīng)濟(jì)效益和管理效率,規(guī)定在超出約定存放時(shí)間而沒(méi)來(lái)取車(chē)的客戶,要對(duì)存放的車(chē)輛在保管費(fèi)用的基礎(chǔ)上要加上超時(shí)費(fèi)用。
2.2 基本參數(shù)
根據(jù)“鏡像原則”可以將獨(dú)立式單巷道堆垛式立體車(chē)庫(kù)模型進(jìn)行簡(jiǎn)化,即選巷道一側(cè)(圖2選取第2行)的庫(kù)位建立以堆垛機(jī)在出入口位置右側(cè)車(chē)位為零點(diǎn)的庫(kù)位坐標(biāo)圖,該簡(jiǎn)化模型能夠清楚地反映出整個(gè)立體車(chē)庫(kù)的存取車(chē)模擬過(guò)程。庫(kù)位編碼平面如圖2所示。
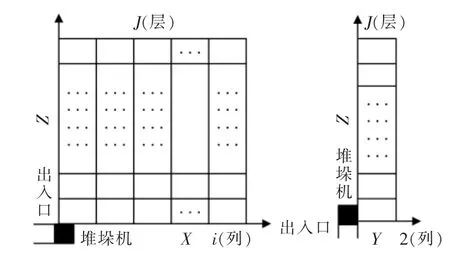
圖2 庫(kù)位編碼示意Fig.2 Location coding
為方便模型的表達(dá),設(shè)定以下基本參數(shù):L,H,D分別為立體車(chē)庫(kù)單個(gè)庫(kù)位的X軸向長(zhǎng)度、Z軸向高度、Y軸向的深度;νx為堆垛機(jī)在X軸向的水平橫移速度;νy為堆垛機(jī)雙向伸縮機(jī)構(gòu)沿Y軸方向的速度;νz為堆垛機(jī)在Z軸方向的升降速度;s為車(chē)庫(kù)里待存放到立體車(chē)庫(kù)的車(chē)輛編號(hào),對(duì)應(yīng)其存放順序,s∈N={1,2,…,n};p=(i, j)為車(chē)庫(kù)中第 i列第 j層的庫(kù)位,其中 i∈I={1,2,…,║I║}, j∈J={1,2,…,║J║};dp為車(chē)庫(kù)中p庫(kù)位距離出入口的距離;tp為車(chē)輛存放到車(chē)庫(kù)p庫(kù)位的存車(chē)操作時(shí)間。
如圖3所示,堆垛機(jī)在初始狀態(tài)下停靠在立體車(chē)庫(kù)的入口處待命,在存車(chē)優(yōu)先策略下,存取車(chē)所用的時(shí)間只與本次命令目標(biāo)車(chē)位的位置有關(guān),故存取車(chē)耗時(shí)為

決策變量:xsp為車(chē)輛s是否存放到p庫(kù)位,為0~1決策變量。
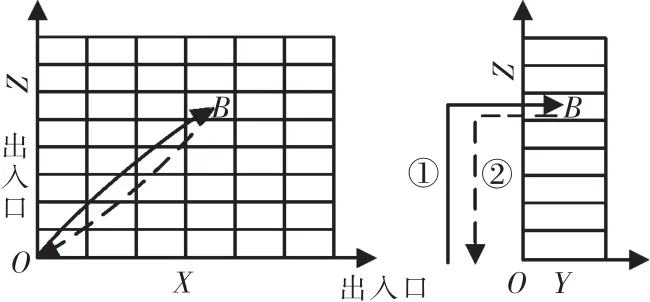
圖3 堆垛機(jī)行走路線Fig.3 Stacker walking roadmap
2.3 模型
為了表示停車(chē)高峰期車(chē)庫(kù)待存車(chē)輛的存車(chē)操作等待時(shí)間,目標(biāo)函數(shù)為

由此可見(jiàn),主要是通過(guò)對(duì)xsp停車(chē)高峰期車(chē)庫(kù)排隊(duì)待存車(chē)輛與立體車(chē)庫(kù)庫(kù)位的匹配進(jìn)行優(yōu)化,以獲取最小的存車(chē)操作等待時(shí)間,同時(shí)得到后續(xù)取車(chē)或取車(chē)高峰最小的取車(chē)操作等待時(shí)間。
模型約束條件:
1)同一個(gè)庫(kù)位最多放1輛車(chē),即:

2)1輛車(chē)必須占用1個(gè)庫(kù)位,即:

3)根據(jù)就近分配的庫(kù)位原則,存車(chē)時(shí)按存車(chē)的先后優(yōu)先考慮存車(chē)時(shí)間最短庫(kù)位,即:

4)根據(jù)就近分配的庫(kù)位原則,優(yōu)先考慮的存車(chē)時(shí)間相同時(shí)則選取離出入口近的庫(kù)位,即:

2.4 模型驗(yàn)證
在此,對(duì)一個(gè)小案例進(jìn)行cplex求解,以驗(yàn)證所構(gòu)建模型程序的正確性以及模型的效果。根據(jù)以往工程的實(shí)踐經(jīng)驗(yàn)以及某泊車(chē)有限公司所提供的數(shù)據(jù),給出該公司生產(chǎn)自動(dòng)化立體車(chē)庫(kù)的基本參數(shù):立體車(chē)庫(kù) H為2.15 m,L為2.80 m,D為5.60 m;堆垛機(jī)的控制方式為PLC控制,升降速度vz為63.8 m/min,行走速度vx為41.8 m/min,存取速度vy為36.4 m/min。
其中,假設(shè)當(dāng)前停車(chē)高峰存車(chē)系統(tǒng)中共有10輛待存車(chē),以方塊代替車(chē)(如圖4所示),并對(duì)其進(jìn)行編號(hào)。其編號(hào)規(guī)則為方塊右邊數(shù)字為車(chē)輛按到達(dá)時(shí)間先后的編號(hào),左邊數(shù)字為對(duì)到達(dá)車(chē)輛統(tǒng)計(jì)其預(yù)計(jì)庫(kù)存時(shí)間后按庫(kù)存時(shí)間從短到長(zhǎng)進(jìn)行的編號(hào)。

圖4 車(chē)庫(kù)當(dāng)前待存車(chē)輛集合Fig.4 Garage current deposited vehicle collection
若存取順序采取庫(kù)存時(shí)間從短到長(zhǎng)進(jìn)行先后存放車(chē)輛,由cplex求解得,目標(biāo)函數(shù)值(存車(chē)操作等待時(shí)間)為28.8147 min,車(chē)輛庫(kù)位配載結(jié)果如圖5所示。
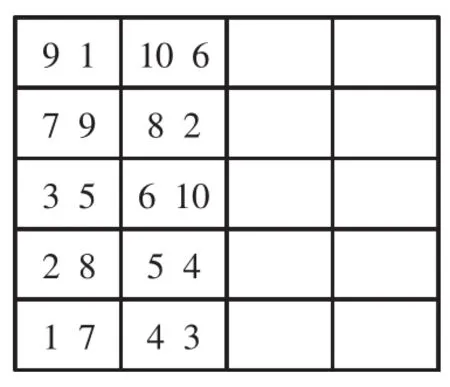
圖5 車(chē)輛庫(kù)位配載Fig.5 Vehicle location allocation
根據(jù)圖5所示數(shù)據(jù),人工計(jì)算存車(chē)操作等待時(shí)間為 10tp(1,1)+9tp(1,2)+8tp(1,3)+7tp(2,1)+6tp(2,2)+5tp(2,3)+4tp(1,4)+3tp(2,4)+2tp(1.5)+1tp(2,5)=28.8147 min。 其 結(jié)果 與 cplex程序的計(jì)算結(jié)果一致,表明該模型程序是正確的,可以滿足最小化存車(chē)時(shí)間和取車(chē)時(shí)間,提高低位區(qū)利用率。
3 緩沖車(chē)道控制系統(tǒng)設(shè)計(jì)
緩沖車(chē)道,這一裝置在以往的車(chē)庫(kù)研究中未曾被提及。當(dāng)待存車(chē)輛駛?cè)刖彌_車(chē)道,堆垛機(jī)對(duì)車(chē)道上的車(chē)輛進(jìn)行裝載時(shí),緩沖車(chē)道需要保持靜止?fàn)顟B(tài),從而保證待存車(chē)輛平穩(wěn)入庫(kù)。當(dāng)堆垛機(jī)完成車(chē)輛的裝載動(dòng)作后,緩沖車(chē)道需要將下一輛待存的車(chē)運(yùn)至最前端,以保證當(dāng)堆垛機(jī)到達(dá)時(shí)可以直接對(duì)其進(jìn)行裝載。緩沖車(chē)道控制系統(tǒng)可以在不需要人工操作的情況下,根據(jù)傳感器所反饋的信息,通過(guò)控制器的邏輯判斷,完成自動(dòng)化操作。
3.1 緩沖車(chē)道PLC控制系統(tǒng)功能需求
緩沖車(chē)道控制系統(tǒng)包括自動(dòng)控制和信息采集兩部分。自動(dòng)控制部分是以驅(qū)動(dòng)電機(jī)為控制對(duì)象,通過(guò)PLC控制使緩沖車(chē)道自動(dòng)運(yùn)行、停止;信息采集部分是該控制系統(tǒng)的輸入環(huán)節(jié),壓力傳感器、光電傳感器可以檢測(cè)緩到?jīng)_車(chē)道上每個(gè)車(chē)位的壓力值以及位置信息,這些數(shù)據(jù)將會(huì)作為判斷下一步行為的依據(jù)傳遞給PLC。
緩沖車(chē)道的控制要求為當(dāng)堆垛機(jī)對(duì)緩沖車(chē)道上的車(chē)輛進(jìn)行裝載時(shí),緩沖車(chē)道禁止運(yùn)行;當(dāng)車(chē)輛駛?cè)胲?chē)道時(shí),緩沖車(chē)道禁止運(yùn)行;當(dāng)緩沖車(chē)道上沒(méi)有車(chē)輛,則緩沖車(chē)道禁止運(yùn)行;若駛?cè)氲能?chē)輛沒(méi)有停放在安全范圍內(nèi),則系統(tǒng)發(fā)出警報(bào),緩沖車(chē)道無(wú)法運(yùn)行;若駛?cè)氲能?chē)輛沒(méi)有被固定裝置成功固定,則系統(tǒng)發(fā)出警報(bào),緩沖車(chē)道無(wú)法運(yùn)行。
除上述基本控制要求以外,緩沖車(chē)道還會(huì)根據(jù)每個(gè)車(chē)位有無(wú)車(chē)輛而決定電機(jī)是否轉(zhuǎn)動(dòng)。
3.2 傳感器信號(hào)采集方案設(shè)計(jì)
緩沖車(chē)道傳感器信號(hào)采集部分是控制系統(tǒng)的輸入環(huán)節(jié),也是判斷執(zhí)行部分是否工作的依據(jù),它包括壓力傳感器、限位傳感器、溫度傳感器等。當(dāng)壓力傳感器檢測(cè)到緩沖車(chē)道上有車(chē)輛停靠時(shí),會(huì)根據(jù)緩沖車(chē)道上各車(chē)位車(chē)輛的停靠情況,生成對(duì)應(yīng)的作業(yè)指令。若超過(guò)額定電流的6倍,該模塊會(huì)輸出高電平,PLC控制驅(qū)動(dòng)電機(jī)停止工作,防止超載損壞。緩沖車(chē)道控制系統(tǒng)如圖6所示。
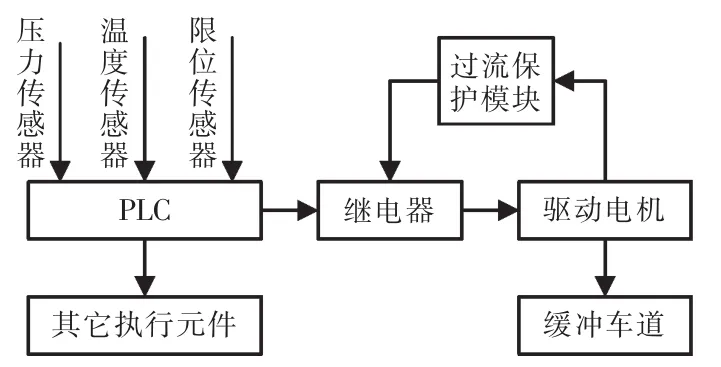
圖6 緩沖車(chē)道控制系統(tǒng)示意Fig.6 Buffer lane control system overall block
傳感器數(shù)據(jù)采集單元通過(guò)壓力檢測(cè)、位置檢測(cè)、溫度檢測(cè)完成對(duì)緩沖車(chē)道相關(guān)數(shù)據(jù)的獲取,然后將緩沖車(chē)道數(shù)據(jù)傳遞給PLC,PLC再根據(jù)所傳遞的數(shù)值進(jìn)行判斷分析,最后驅(qū)動(dòng)執(zhí)行部分完成對(duì)應(yīng)操作。
以限位傳感器為例,限位傳感器安裝在緩沖車(chē)道相鄰車(chē)位相接處,用于檢測(cè)該車(chē)位車(chē)輛是否安全停放。若限位傳感器檢測(cè)到該車(chē)位有車(chē)輛越過(guò)安全位置,傳感器會(huì)發(fā)送高電平信號(hào)至控制器PLC的I/O端口,該端口會(huì)執(zhí)行中斷服務(wù)程序,系統(tǒng)發(fā)出警報(bào)提示用戶調(diào)整車(chē)輛位置,直至用戶將車(chē)輛安全停放在規(guī)定范圍之內(nèi)方可解除警報(bào),從而達(dá)到車(chē)輛安全停靠的目的。
緩沖車(chē)道上每個(gè)車(chē)位均需要安裝壓力傳感器,用于檢測(cè)該車(chē)位是否有車(chē)輛駛?cè)耄瑝毫鞲衅骺梢詫①|(zhì)量信號(hào)轉(zhuǎn)變?yōu)榭蓽y(cè)量的電信號(hào)進(jìn)行輸出,若壓力傳感器檢測(cè)到的數(shù)值不斷變化,表示有車(chē)輛正駛?cè)朐撥?chē)位,該傳感器的反饋值是PLC進(jìn)行控制的依據(jù)。其它車(chē)位安裝了光電傳感器,用于檢測(cè)該車(chē)位是否有車(chē)輛停靠;驅(qū)動(dòng)電機(jī)附近安裝了溫度傳感器,用于檢測(cè)系統(tǒng)工作環(huán)境是否符合安全標(biāo)準(zhǔn)。各傳感器的安裝位置如圖7所示。
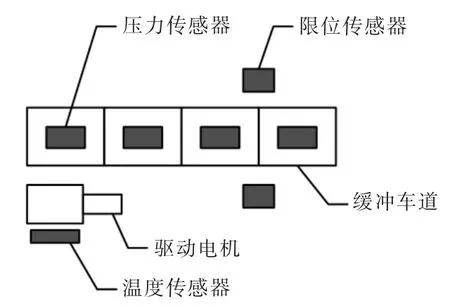
圖7 傳感器的安裝位置Fig.7 Sensor installation location
3.3 緩沖車(chē)道控制流程設(shè)計(jì)
緩沖車(chē)道控制系統(tǒng)主程序?qū)崿F(xiàn)的功能為緩沖車(chē)道根據(jù)不同車(chē)位壓力傳感器所檢測(cè)的數(shù)值自行啟動(dòng)、停止;若電機(jī)溫度過(guò)高,系統(tǒng)報(bào)警并停止運(yùn)行;若首車(chē)位限位傳感器檢測(cè)到車(chē)輛越過(guò)安全位置,系統(tǒng)給予提示。此外為了安全起見(jiàn)系統(tǒng)設(shè)置了強(qiáng)行停止按鈕。
為了便于描述,在此將緩沖車(chē)道的4個(gè)車(chē)位由車(chē)道入口處依次命名為S1,S2,S3,S4。緩沖車(chē)道控制系統(tǒng)流程如圖8所示。
緩沖車(chē)道控制系統(tǒng)的安全檢測(cè)流程如下:PLC循環(huán)檢測(cè)各傳感器所傳遞的數(shù)據(jù),并進(jìn)行數(shù)據(jù)采集。檢測(cè)驅(qū)動(dòng)電機(jī)溫度是否超標(biāo),如若超標(biāo),系統(tǒng)會(huì)給予警報(bào)信息并斷電保護(hù)。確定電機(jī)正常運(yùn)轉(zhuǎn)后,檢測(cè)S1車(chē)位車(chē)輛是否安全停放,若停放的車(chē)輛越過(guò)安全警示線,系統(tǒng)則發(fā)出警報(bào)提示用戶進(jìn)行車(chē)位調(diào)整,直至停放的車(chē)輛在安全線以內(nèi)方可解除警報(bào),系統(tǒng)才能繼續(xù)運(yùn)行。以上兩步為常規(guī)安全檢測(cè),也是緩沖車(chē)道進(jìn)行車(chē)輛運(yùn)載的基礎(chǔ)。
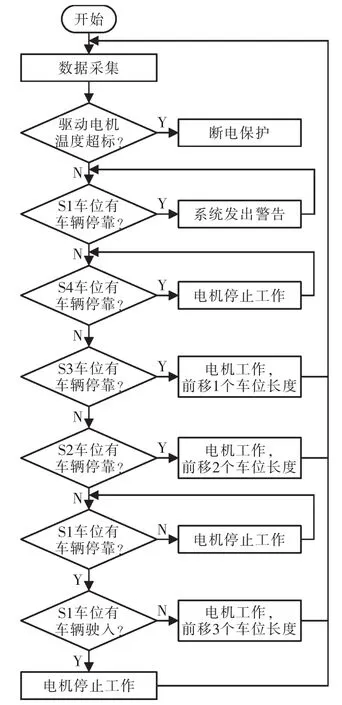
圖8 緩沖車(chē)道PLC控制系統(tǒng)流程Fig.8 Flow chart of PLC control system of buffer Lane
緩沖車(chē)道控制系統(tǒng)在確定數(shù)據(jù)采集完成以及安全檢測(cè)達(dá)標(biāo)之后,會(huì)根據(jù)每個(gè)車(chē)位是否停靠車(chē)輛而執(zhí)行不同的操作,從而保證所承載車(chē)輛依次被堆垛機(jī)叉取至載車(chē)臺(tái)上。具體控制流程描述如下:首先,判斷S4車(chē)位是否有車(chē)輛停放,如果檢測(cè)到該車(chē)位有車(chē)輛存放,則表示該車(chē)輛正在或即將被堆垛機(jī)叉取,需要緩沖車(chē)道驅(qū)動(dòng)電機(jī)停止工作,以保證堆垛機(jī)順利叉取。如果檢測(cè)到S4車(chē)位沒(méi)有車(chē)輛停靠,則繼續(xù)檢測(cè)S3車(chē)位,如果S3車(chē)位有車(chē)輛停靠,即表示該車(chē)位有車(chē)輛需要被存儲(chǔ),而此刻S4車(chē)位處于空閑狀態(tài),執(zhí)行電機(jī)正轉(zhuǎn)指令,該車(chē)位前移1個(gè)車(chē)位長(zhǎng)度的距離,S3車(chē)位停靠的車(chē)輛運(yùn)送至S4車(chē)位。如果檢測(cè)到S3車(chē)位無(wú)車(chē)輛停靠,繼續(xù)檢測(cè)S2車(chē)位工作狀態(tài),如果檢測(cè)到S2車(chē)位有車(chē)輛停靠,而此時(shí)S3、S4車(chē)位均處于空閑狀態(tài),電機(jī)正轉(zhuǎn),該車(chē)位前移2個(gè)車(chē)位長(zhǎng)度的距離,S2車(chē)位停靠的車(chē)輛運(yùn)送至S4車(chē)位。如若檢測(cè)到S2車(chē)位處于空閑狀態(tài),將繼續(xù)檢測(cè)S1位置車(chē)位。如若檢測(cè)到S1車(chē)位是沒(méi)有車(chē)輛停靠,表示當(dāng)前緩沖車(chē)道沒(méi)有工作任務(wù),電機(jī)停止工作。PLC根據(jù)S1車(chē)位壓力傳感器所檢測(cè)的數(shù)值變化可以判斷出該車(chē)位是否有車(chē)輛正在駛?cè)耄绻麢z測(cè)到該車(chē)位有車(chē)輛駛?cè)耄彌_車(chē)道停止運(yùn)動(dòng),如果檢測(cè)到該車(chē)位車(chē)輛已經(jīng)停靠完畢,電機(jī)正轉(zhuǎn),該車(chē)位前移3個(gè)車(chē)位長(zhǎng)度的距離。
該程序?yàn)檠h(huán)執(zhí)行程序,當(dāng)電機(jī)按控制指令工作完成之后,系統(tǒng)會(huì)跳轉(zhuǎn)至數(shù)據(jù)采集環(huán)節(jié)繼續(xù)執(zhí)行,從而保證了緩沖車(chē)道連續(xù)工作的能力。
4 結(jié)語(yǔ)
本文提出了以解決停車(chē)高峰巷道堆垛式立體車(chē)庫(kù)把待存車(chē)輛集合存放到車(chē)庫(kù)某個(gè)確定庫(kù)位的存車(chē)排序問(wèn)題,構(gòu)建了該問(wèn)題的混合整數(shù)規(guī)劃模型。此模型可以利用cplex中的分支界定算法進(jìn)行求解。此外,還提出一種基于PLC的緩沖車(chē)道控制研究方案,提高了車(chē)庫(kù)存取效率,減少了用戶的排隊(duì)等待時(shí)間。綜上該研究可為后續(xù)研究提供算法和理論支持。
[1]顏申文.電子智能化立體車(chē)庫(kù)現(xiàn)狀與發(fā)展走向[J].智富時(shí)代,2016,32(3):226.
[2]方二喜,陳小平.基于遺傳算法的立體車(chē)庫(kù)車(chē)位調(diào)度研究[J].計(jì)算機(jī)與數(shù)字工程,2007,35(12):43-45.
[3]凌赟.帶載車(chē)板緩存裝置巷道堆垛式立體停車(chē)庫(kù)存取策略的研究[D].太原:太原理工大學(xué),2014.
[4]陸波,王榮揚(yáng).基于PLC的升降橫移立體車(chē)庫(kù)控制系統(tǒng)設(shè)計(jì)[J].自動(dòng)化儀表,2015,36(7):22-25.
[5]Potr? I,Lerher T,Kramberger J,et al.Simulation model of multishuttle automated storage and retrieval systems[J].Journal of Materials Processing Technology,2004(4):236-244.
[6]Yamamoto M,Hayashi Y,Mohri A.Garage parking planning and control of car-like robot using a real time optimization method[C]//The IEEE International Symposium on Assembly and Task Planning:From Nano To Macro Assembly and Manufacturing.IEEE Xplore,2005:248-253.
[7]Park B C,Park B C.Analytical models and optimal strategies for automated storage/retrieval system operations[J].Georgia Institute of Technology,1991.
[8]Moon G,Kim G P.Effects of relocation to AS/RS storage location policy with production quantity variation[J].Computers&Industrial Engineering,2001,40(1):1-13.
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48