雙機械手協同運動模型及其工作空間分析
2018-01-18 05:18:00朱姿娜周玉鳳
制造業自動化 2017年11期
關鍵詞:模型
李 情,茅 健,朱姿娜,周玉鳳
(上海工程技術大學 機械工程學院,上海 201620)
0 引言
現代工業的發展和機械手技術的進步使得機械手的性能不斷提高,機械手應用的領域和范圍正不斷擴展。為了適應不斷提高的任務復雜性、操作智能性以及系統柔順性等要求,雙機械手乃至多機械手之間的協調和協同作業是機械手技術在工業環境中進行推廣和應用急需解決的關鍵技術之一[1]。
國內外對雙機械手協調運動做了非常多的研究工作。在國際上,Clemson大學機器人實驗室[2],通過控制兩臺PUMA-560工業機械手來完成搬運實驗;Duke實驗室[3],通過控制兩臺ABB-IRB140工業機械手來完成協調控制實驗;PRISMA實驗室[4],通過控制兩臺SMART-3S工業機械手來完成協調插孔實驗。在國內,沈陽自動化研究所采用分層結構,根據離散控制原理建立了多級機械手控制系統,該系統成功利用PUMA-560工業機械手和PUMA-760工業機械手完成了位置控制和軌跡控制協調實驗[5];東南大學通過控制兩臺型號為VA1400和HP20的YASKAWA工業機械手完成了雙機械手協同焊接和搬運實驗[6]。
機械手的工作空間是機械手末端執行器所能到達的范圍,是機械手運動靈活程度的重要指標之一[7],同時也是機械手是否有逆解的依據。對于雙機械手工作空間的求解主要有圖解法、解析法和數值法。圖解法和解析法對于多自由度的機械手會有無法準確描述、計算繁瑣等問題。數值法可以分析任意結構的機械手,而且隨著計算機技術的發展得到了廣泛應用[8]。
本文采用D-H變換矩陣法建立雙機械手運動學模型,揭示機械手末端執行器在不同運動形態下笛卡爾坐標空間位姿與機械手各關節變量之間的轉換關系。利用MATLAB中Robotics Toolbox建立雙RCX340機械手三維仿真模型,驗證運動學模型的可靠性。采用蒙特卡洛法對雙機械手的工作空間進行分析,得到雙機械手末端執行器的最佳協調工作空間。
1 雙機械手運動學分析
單機械手與雙機械手運動學分析的整體思路相似,不同的是雙機械手需要考慮協同性與整體性。
1.1 雙機械手坐標系的建立
本文以兩臺SCARA型機械手為研究對象,利用D-H參數方法中的關節方法建立各連桿的坐標系,如圖1所示。首先取兩機械手操作臂的中點為坐標原點(O0-X0Y0Z0),向兩邊增減平移坐標至兩機械手底座中心點,兩機械手基礎坐標系分別記為Pl-XlYlZl和Pr-XrYrZr,即為各個底座為分坐標中心,然后依次向上延伸至各個關節處,其中L1、L2、L3與R1、R2、R3分別代表兩末端不同運動形態的機械手傳動軸。雙機械手各連桿D-H參數如表1所示。
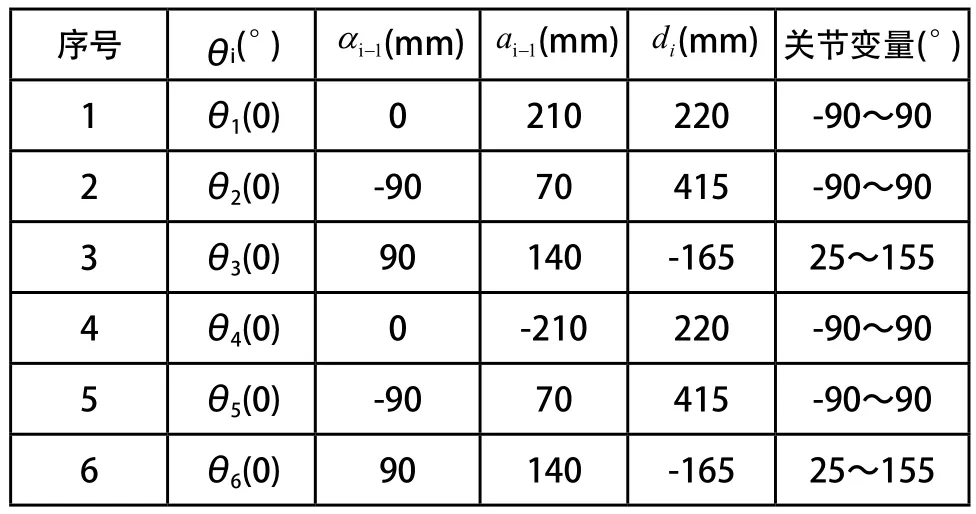
表1 雙機械手連桿的D-H參數
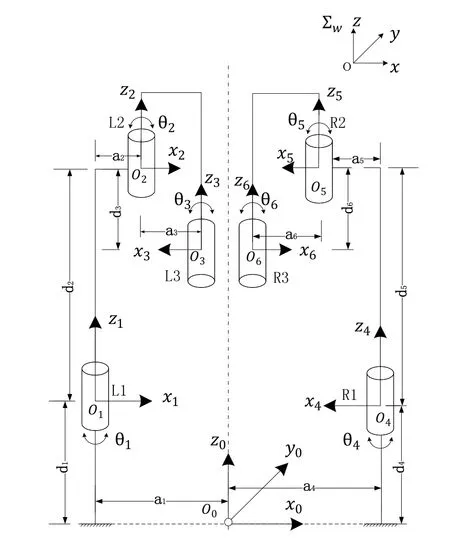
圖1 雙機械手運動關節結構圖
1.2 正向運動學模型
機械手的正向運動學是指由給定的關節值求解機械手手部位姿。在機器人學中,機械手的手部姿態和位置可以用4×4階矩陣來表示:
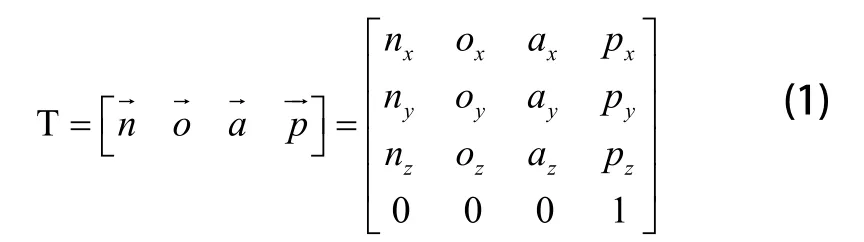
其中為手部接近矢量;為手部姿態矢量;為手部法相矢量。此三個矢量構成右手矢量級,即手部位置可以用從基礎參考系原點指向手部中心的矢量來表示,這里,為手部在基礎坐標系中的坐標。
用A矩陣描述一桿件和下一桿件之間的齊次變換關系,用Denavit-Hartenberg法得到連桿變換的一般表達式為:
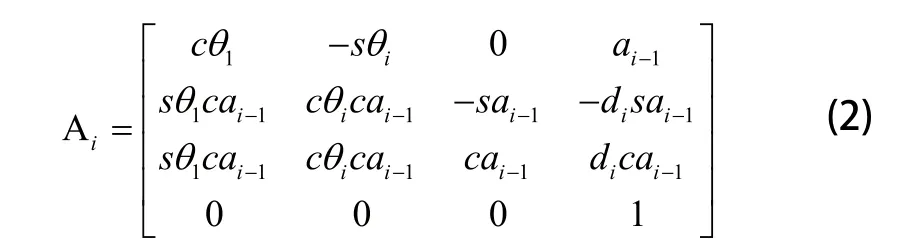
將D-H參數表中的數據帶入連桿變換通式中得到相鄰連桿坐標系之間的齊次變換矩陣為:
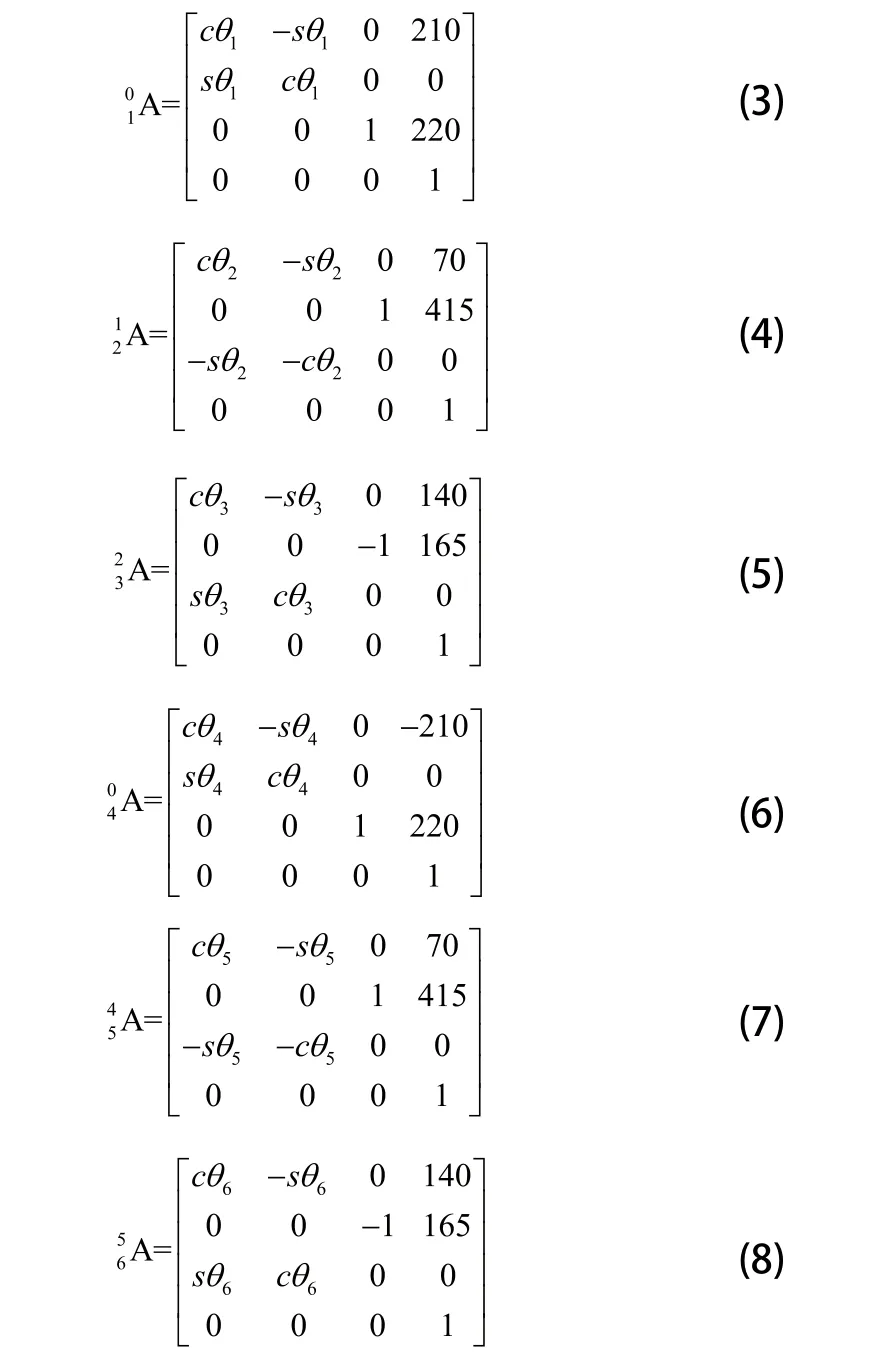

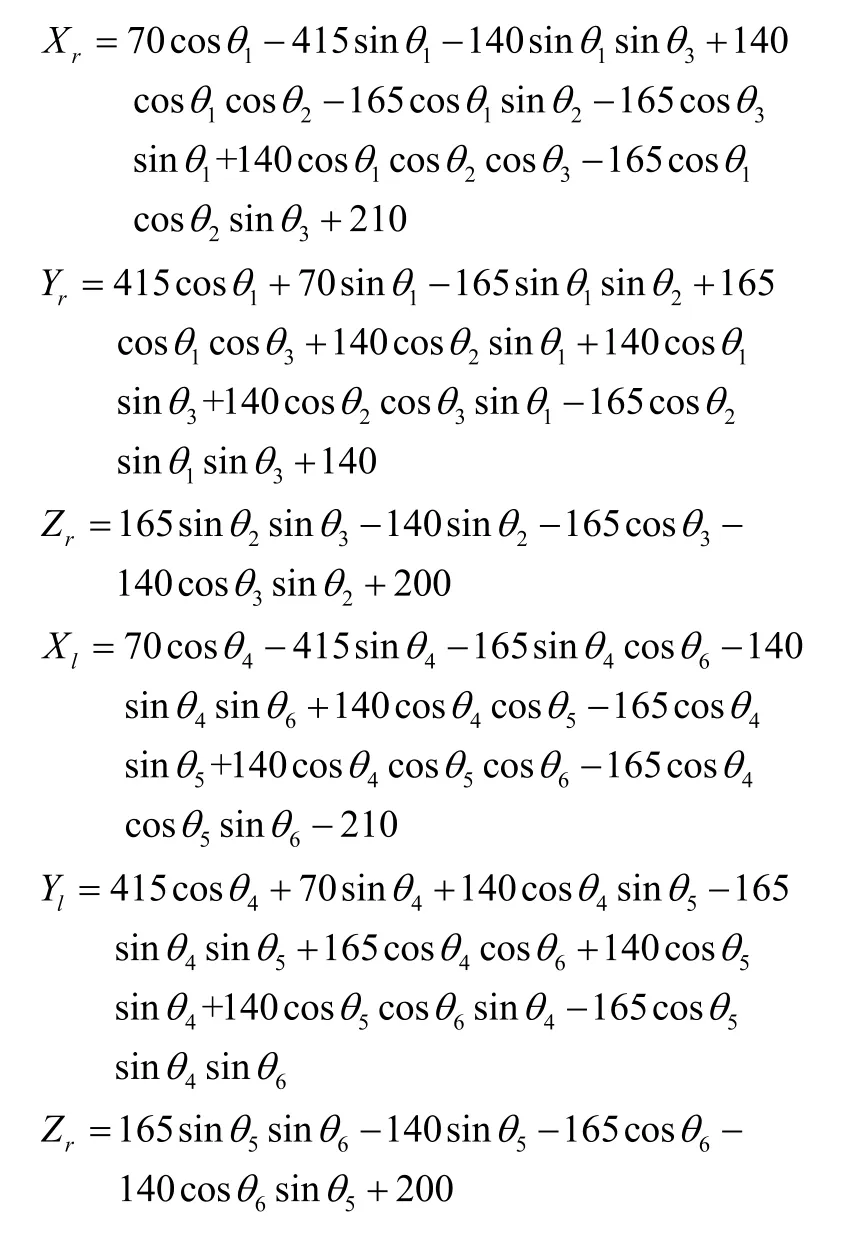
末端執行器在基礎坐標系位置:

這樣可得到雙機械手末端執行器正向運動學模型,即:
1.3 逆向運動學模型
從應用研究的角度來說,逆向運動學是機械手運動規劃和軌跡控制的依據。求解逆運動學問題是已知機械手末端執行器的坐標位置來計算機械手各個關節的角度值,是正向運動學問題的反過程[9]。求解過程復雜:
利用逆變換左乘式(1)兩邊:
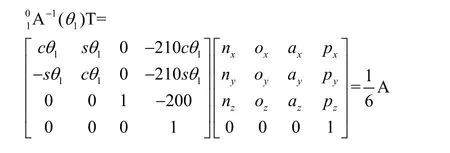
根據三角代換和矩陣的相關運算可依次得出:
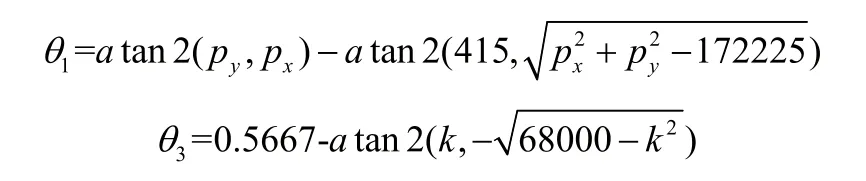
式中:
因雙機械手為并聯對稱放置,故同型號的兩個機械手的關節角度值分別相同,即:

2 雙機械手模型建立與分析
2.1 模型的建立
在MATLAB中建立雙RCX340機械手模型,如圖2所示。
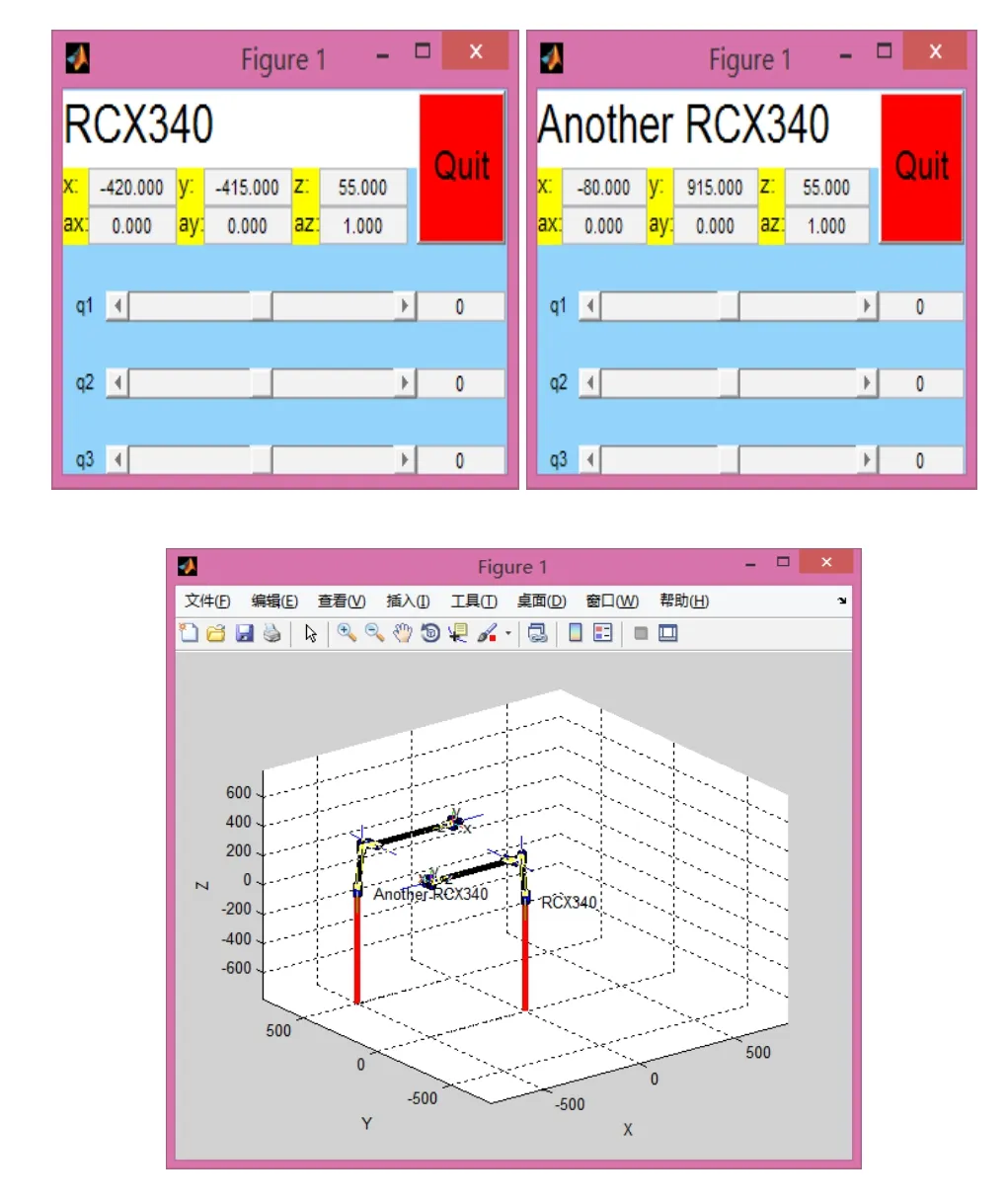
圖2 基于Robotics toolbox的雙RCX340機械手模型
2.2 雙機械手模型分析
通過移動圖2中代表關節角度的左右各3個滑塊驅動雙機械手運動,左右滑塊q1、q2的移動可以改變RCX340和AnotherRCX340的末端執行器的位置,左右滑塊q3的移動可使末端執行器具有不同的姿態。為驗證運動學方程式的正確性,把機械手各桿件的幾何參數和3組隨機選取的關節變量值代入運動學方程,求得末端執行器的位姿;然后將相應的數據輸入到雙機械手滑塊控制面板中直接讀取實際的末端執行器的位姿數據并進行比較。隨機選取的3組關節變量值如表2所示。
滑塊控制面板直接讀取的值和雙機械手末端執行器的方程求解數據比較如表3和表4所示。
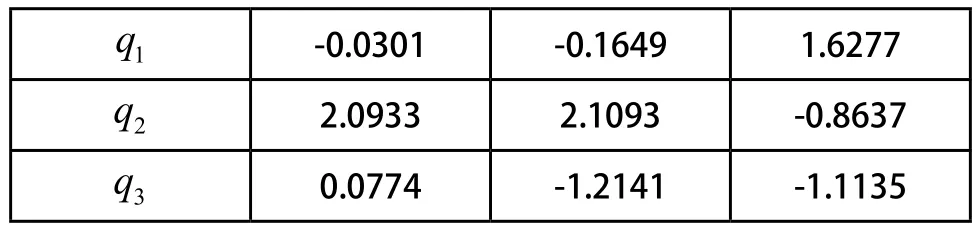
表2 三組隨機關節變量
從表3中可以看出,隨機變量代入運動學方程求取的正解和滑塊控制面板直接讀取的末端坐標數值相比誤差較小,而從表4中不僅可以看出運動學逆解和滑塊控制面板讀取的關節角度數值誤差較小,還可以看出同型號對稱放置的左右機械手對應關節角度值也是相同的。因此,驗證了所求解的運動學方程和利用函數建立的機械手三維模型的可靠性。
3 雙機械手工作空間分析
機械手的活動范圍是由其工作空間的大小所決定的,其形狀和尺寸在機械手設計和優化等方面具有重要意義[10]。蒙特卡洛法基于隨機理論,是常用的求解機械手工作空間的數值方法,其基本思想是:機械手的各關節是在其相應取值范圍內工作的,當所有關節在相應取值范圍內隨機遍歷取值后,末端點的所有隨機值的集合就構成了該機械手的工作空間[11]。
利用蒙特卡洛法求取工作空間的步驟如下:
1)根據機械手運動學正解,求出機械手末端執行器相對于基座坐標系的位置向量P=[px, py, pz]。

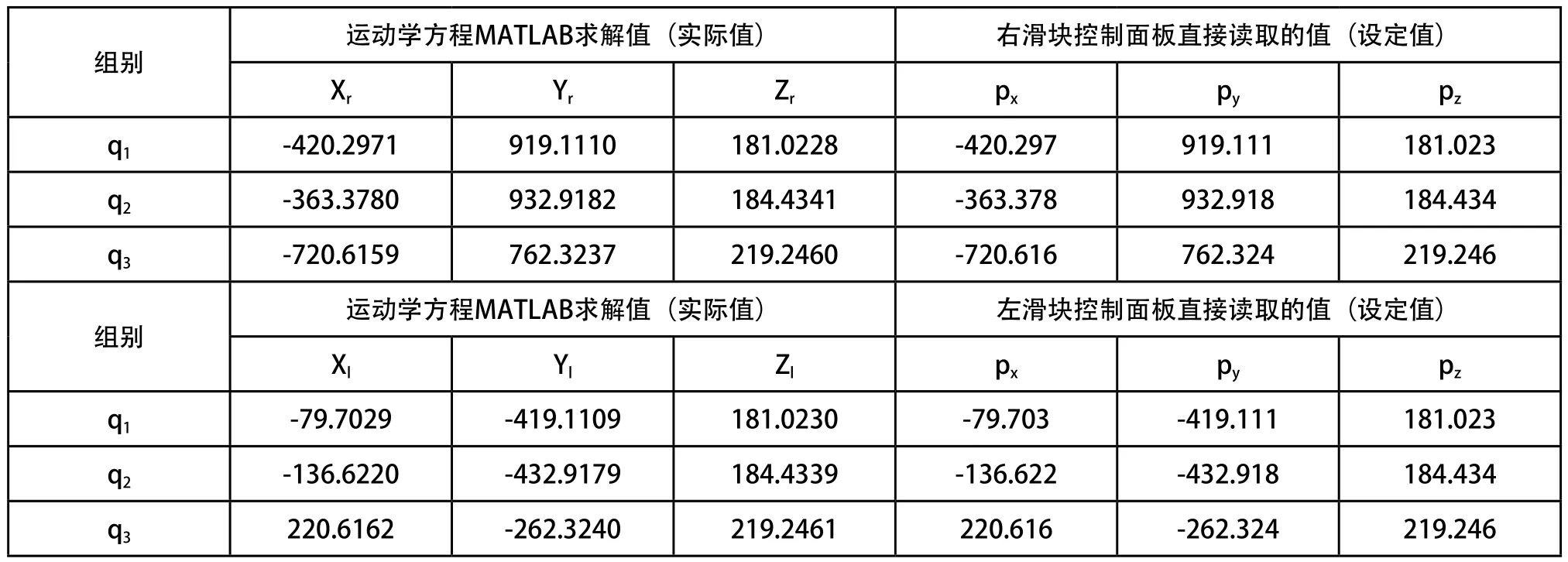
表3 運動學方程MATLAB正解值與兩滑塊設定值比較
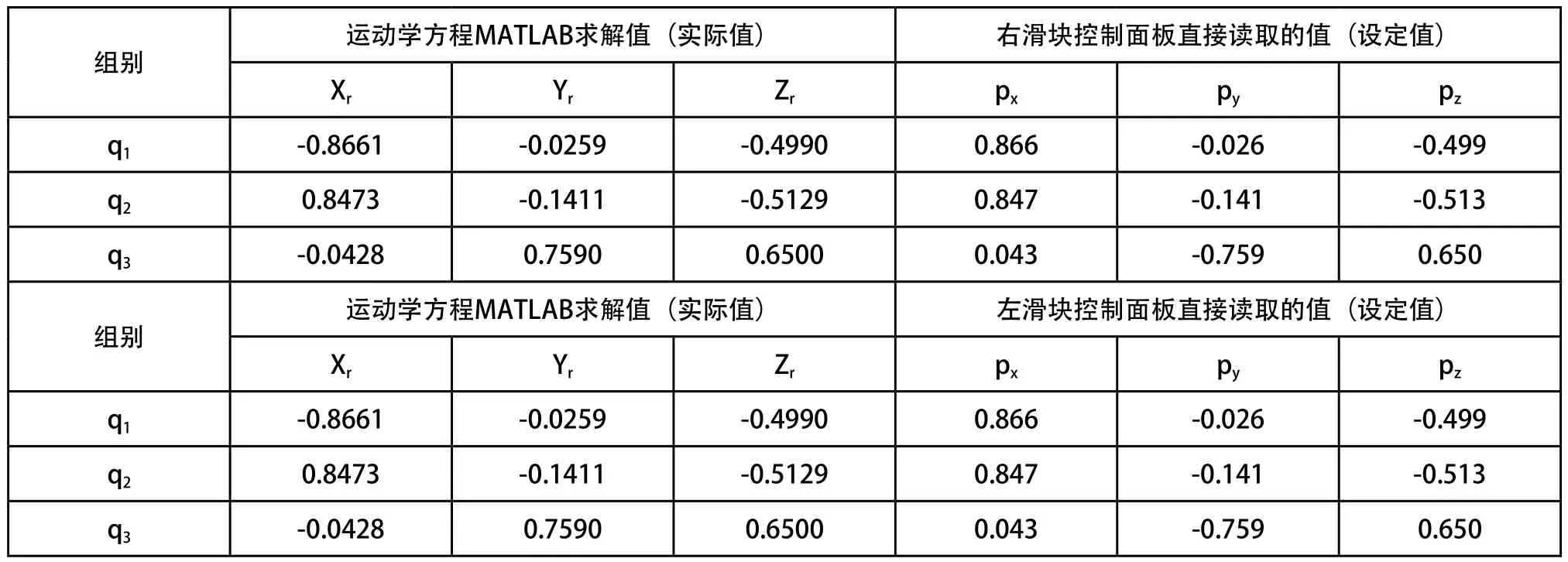
表4 運動學方程MATLAB逆解值與兩滑塊設定值比較
3)將N個關節變量偽隨機值組合代入末端執行器的位置向量P=[px, py, pz],并將其對應的x坐標、y坐標、z坐標分別存于矩陣X、Y和Z中;坐標值數目越多,結果就越接近雙機械手的實際工作空間。
4)將所得位置向量的值用描點的方式顯示出來,即可形成雙機械手工作空間。取N=100000,D=900,利用蒙特卡洛法在MATLAB中求解雙機械手的工作空間如圖3所示。
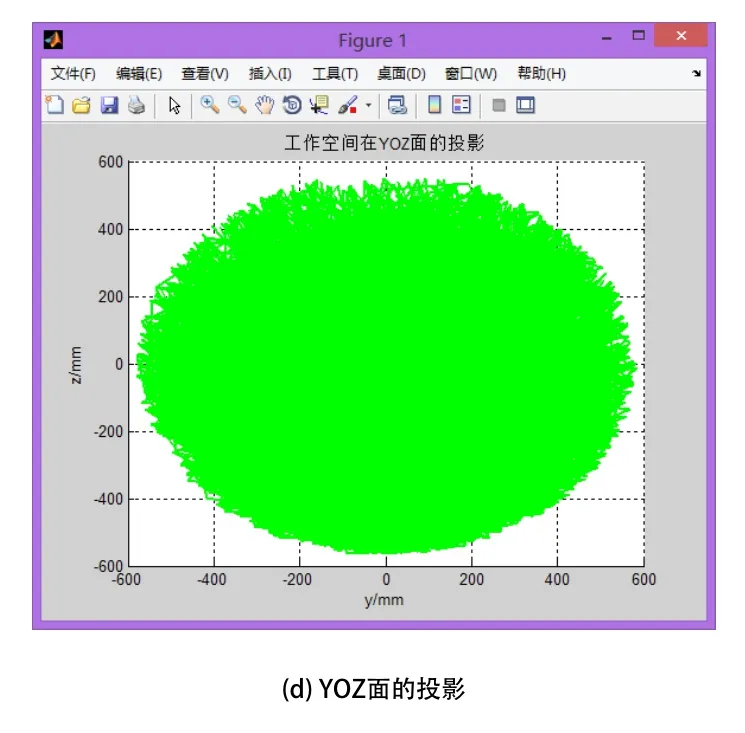
圖3 雙機械手工作空間
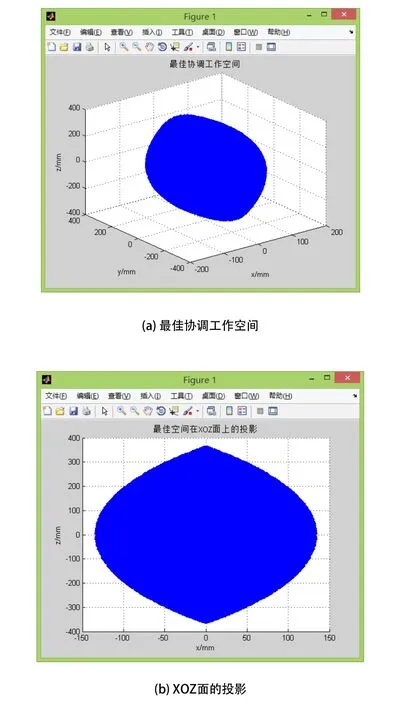
從圖3可知,模擬出雙機械手工作空間的形狀近似兩個橢球體相融,相融部分為雙機械手協調操作的最佳協調工作空間,末端執行器最佳協調工作空間沿X軸的范圍為(-130,130),沿Y軸的范圍為(-360,360),沿Z軸的范圍為(-350,350)。利用邊界條件和蒙特卡洛法,進而模擬出雙機械手最佳協調工作空間的仿真圖,如圖4所示,模擬出的最佳協調工作空間為雙機械手協調軌跡規劃提供了理論依據。
【】【】
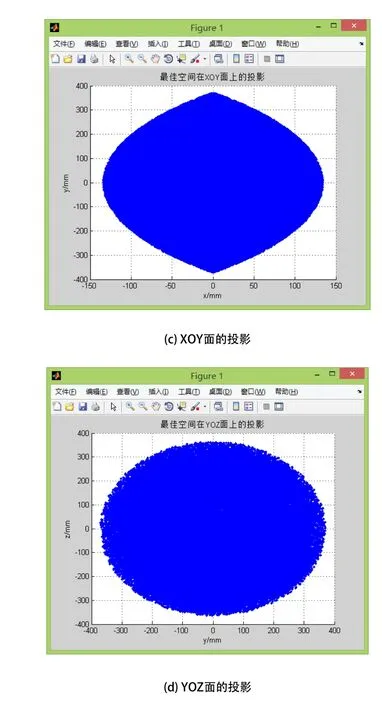
圖4 雙機械手最佳協調工作空間
4 結論
本文建立了雙機械手運動學模型,揭示了機械手末端執行器在不同運動形態下笛卡爾坐標空間位姿與機械手各關節變量之間的轉換關系。仿真結果驗證了所建立的雙機械手運動學方程和基于Robotics Toolbox構建的三維模型的可靠性,直觀地分析了機械手末端執行器位姿和各關節轉角之間的關系。同時,采用蒙特卡洛法對雙機械手工作空間進行了分析,得到雙機械手末端執行器的最佳協調工作空間,為雙機械手協調軌跡規劃提供了理論依據。
[1]歐陽帆.雙機器人協調運動方法的研究[D].廣州:華南理工大學,2013.
[2]Alford C, Belyeu S. Coordinated control of two robot arms[A].IEEE International Conference on Robotics and Automation.Proceedings.IEEE[C],2003:468-473.
[3]Kumar M, Garg D P. Fuzzy logic based control of multiple manipulators in a flexible work cell[A].IEEE International Symposium on Intelligent Control[C].IEEE Xplore,2003:399-404.
[4]Caccavale F, Natale C, Siciliano B, et al. Achieving a cooperative behavior in a dual-arm robot system via a modular control structure[J].Journal of Robotic Systems,2001,18(12):691-699.
[5]曲道奎,談大龍.雙機器人協調控制系統[J].機器人,1991,13(3):6-11.
[6]張曦.多機器人協作焊接系統的算法研究與仿真實現[D].南京:東南大學,2015.
[7]田海波,馬宏偉,魏娟.串聯機器人機械臂工作空間與結構參數研究[J].農業機械學報,2013,44(4):196-201.
[8]Cao Y, Lu K, Li X, et al. Accurate Numerical Methods for Computing 2D and 3D Robot Workspace[J].International Journal of Advanced Robotic Systems,2011,8(6):1-13.
[9]范叔炬.機械臂運動學算法設計[D].杭州:浙江大學理學院 浙江大學,2008.
[10]劉志忠,柳洪義,羅忠,等.機器人工作空間求解的蒙特卡洛法改進[J].農業機械學報,2013,44(1):230-235.
[11]李瑞峰,馬國慶.基于Matlab仿人機器人雙臂運動特性分析[J].華中科技大學學報自然科學版,2013,41(s1):343-347.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
