基于輕量化的全地形巴哈賽車車架設計與優化
2018-01-18 05:18:00馬其華黃天柱黎勁宏
制造業自動化 2017年11期
陶 超,馬其華,黃天柱,黎勁宏
(1.上海工程技術大學 汽車工程學院,上海 2016202;2.西安建筑科技大學 機電工程學院,西安 710055;3.東華大學 機械工程學院,上海 201620)
0 引言
全地形賽車要求各參賽隊按照賽事規則和賽車制造標準,在規定時間,使用同一型號發動機,設計制造一輛單座、發動機中置、后驅,完成各種嚴厲路況要求考驗的小型越野車。由于在全地形路面上賽車受到的振動、沖擊等影響更大,而這些影響將直接反應到車架上,所以車架的模態及剛強度要求需要經過嚴格分析,以滿足要求。
利用有限元分析法對全地形賽車車架進行評價分析,對于保證設計可靠性和一致性具有重要作用。汪俊[1]等對某方程式賽車車架做了滿載彎曲、滿載加速、滿載轉彎和扭轉工況下的強度和剛度分析,并通過分析結果對車架鋼管尺寸進行了優化,減輕了車架重量;周明華[2]等對某農用車車架進行自由模態分析,得到車架的前6階彈性模態振型及頻率特性,從而驗證了該車架結構設計的合理性;陳旭[3]等計算了某全地形車架的自由模態,并對比實驗模態頻率,驗證了有限元模型及其分析結果的正確性。以上的研究對于常規行駛條件分析已經比較完善了,對于適應全地形要求的賽車車架設計需要根據實際情況提出對保證輕量化的情況下車架設計的可靠性要求。本文從全地形路況對賽車性能的影響出發,運用有限元分析法探討了全地形巴哈賽車車架進行優化設計方法。
1 多條件要求下的巴哈賽車車架設計
全地形巴哈賽車的賽道由單駝峰、飛坡、炮彈坑、連續彎道、泥坑、雙駝峰、輪胎陣、三駝峰、亂石堆等惡劣路況組成,賽車行駛過程中受到的振動和沖擊將通過懸架直接傳到車架上,故對車架設計要求更高。賽規要求車架結構必須由直或彎曲的鋼管組成,兩個支撐點之間的直管結構件必須足夠支撐整個車架的受力,同時長度不得超過711mm。
駕駛艙前部是安放轉向機構、前剎車制動缸及其管線的位置,駕駛艙后部是安放發動機、CVT、減速器、差速器、半軸、排氣裝置、后剎車制動缸及其管線等部件。要保證這些零部件及其總成有足夠的安裝位置和合適的安裝點,并且能合理高效的利用有效空間,使得巴哈賽車整體布局緊促合理。車架的設計還需要考慮安裝好上述所有零件及總成后,整車總寬即后輪兩輪胎外側的直線距離不超過1620mm。車架與整車裝配如圖1所示。
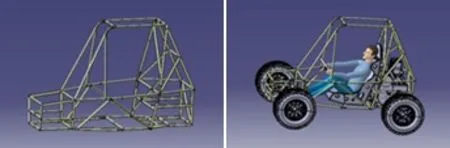
圖1 車架與整車裝配模型
2 巴哈賽車車架的有限元分析
2.1 賽車車架有限元模型的建立
將車架的幾何模型導入到HyperMesh有限元建模軟件中,通過對模型做幾何清理并畫出滿足有限元分析要求的網格。巴哈賽車車架由等厚度的薄壁管件構成,所以選用2D殼單元的結構作為車架網格的結構單元類型,單元的尺寸設置為3mm,網格的類型設置為四邊形和三角形混合網格。建立車架有限元模型如圖2所示。
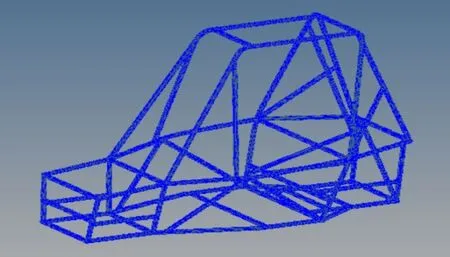
圖2 車架有限元模型
2.2 車架自由模態分析
分析巴哈車架的前12階固有頻率,由于前6階為剛體模態,故提取第7階到第12階的6階模態進行分析,并將第7階頻率記為第1階,如表1所示。第1、2階振型如圖3所示。
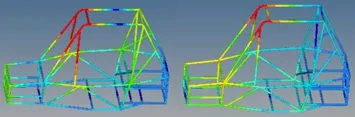
圖3 一、二階模態振型圖
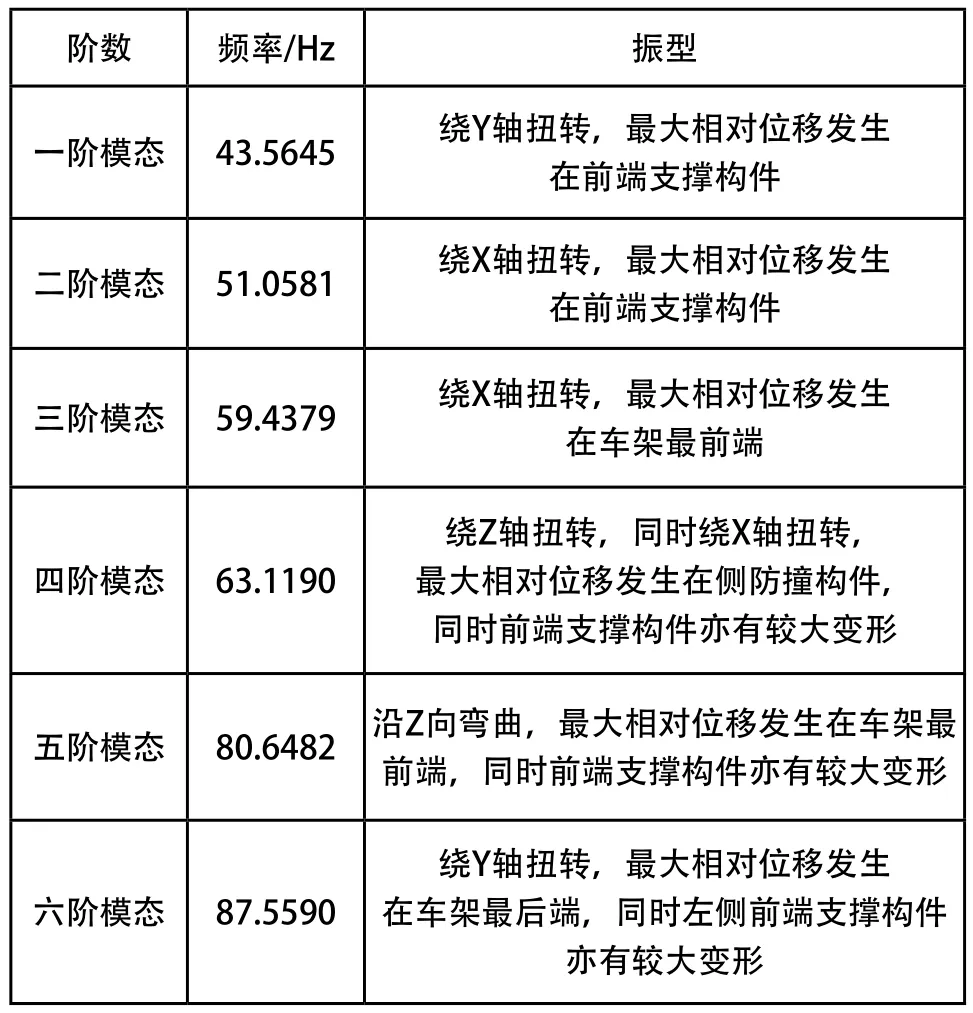
表1 前6階自由模態的固有頻率和振型
巴哈賽車在行駛過程中主要受到兩種外部激勵:
1)來自各種復雜路面凹凸不平的激勵傳到車架會導致車架振動,全地形車懸架系統彈簧以上的部分質量偏頻大致在2~3Hz,簧下質量的偏頻大約在20Hz以下[4]。遠遠低于車架的固有頻率,故不會發生共振;
2)由發動機在不同工作狀態內部產生的振動。賽車在怠速、正常行駛和加速等不同工況下的發動機轉速不同,不同轉速下的激振頻率可由下式求得。
本賽車選用的是指定的百利通M20單缸四沖程風冷發動機,其轉速從怠速到最高轉速的范圍是2000~3600r/min,經式(1)計算得振動頻率范圍為16.67~30Hz,因為其頻率低于車架的固有頻率,故不會發生共振。
2.3 滿載彎曲工況分析
滿載彎曲工況指的是賽車在滿負載的狀態下,前、后四個車輪均著地,在平坦道路上行駛時的工況。此時約束后懸架Y向,前懸架X、Y、Z向的平動自由度。在此工況下,取動載系數1.8,車架受到的力的大小為所有載荷乘以動載系數,方向為Y方向。
車架自重等效點即重心位置處施加的合力為:

駕駛員質量等效點即駕駛員重心處施加的合力為:

發動機及傳動系統等效點即其重心處施加的合力為:

將上述的力作用到巴哈車架上。
由圖4可以看出,在滿載彎曲工況下,巴哈車架最大應力值為55.05MPa,出現在發動機及傳動系統在車架上的安裝位置,小于4130鋼的屈服極限386Mpa;巴哈車架最大位移量為0.036mm,遠小于賽規要求的最大允許撓度,該位移出現在座椅在車架上的安裝位置。
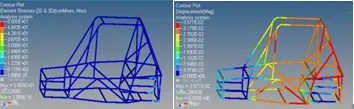
圖4 滿載彎曲工況下車架應力、位移云圖
2.4 急轉彎工況分析
當巴哈賽車在轉彎時會產生指向轉彎半徑圓心的向心力,在向心力的作用下,車架會承受側向荷載,同時在急轉彎時還存在一個縱向制動力[6]。在一個急轉彎實際賽車的向心力是很難計算的,而且向心力和汽車的速度及轉彎半徑的大小有關,因此我們選擇重力加速度g(9.8m/s2)為向心加速度。賽車的制動減速度等于重力加速度和制動力系數的乘積,制動力系數取0.6,動載系數取1.5。因此,車架受到向心力為:

車架受到制動力為:

車架受到的制動力和向心力的作用點在前懸架和后懸架的約束點處[7]。同時約束前懸架X、Y向的平動自由度,左后懸架Y向及右后懸架X、Y、Z向的平動自由度。
由圖5可以看出,在急轉彎工況下,巴哈車架的最大應力為243.5MPa,小于4130鋼的屈服極限386MPa,該應力出現在車架底部與后部防滾環連接點處;巴哈車架最大位移量為6.17mm,小于大賽要求的最大撓度,該位移出現在前懸架的安裝位置。
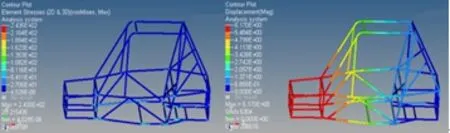
圖5 急轉彎工況下車架應力、位移云圖
2.5 緊急制動工況分析
緊急制動時,賽車車架承受的力將和行駛方向相反。據文獻[5],賽車以減速度進行制動,制動力在前后輪上的分配比為7:3,動載荷系數取1.6,故整車制動力為:

前輪制動力為:

后輪制動力為:

本文將制動力作用在前后懸架的連接點處。約束前懸架X、Y、Z向的平動自由度及后懸架Y、Z向的平動自由度。
由圖6可以看出,在緊急制動工況下,車架最大應力為37.79MPa,遠小于4130鋼的屈服極限386MPa,該應力出現在后懸架與車尾連接點處;車架的最大位移量只有0.151毫米,比大賽要求的最大撓度要小很多,該位移出現在左后懸架的安裝位置。
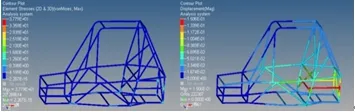
圖6 緊急制動工況下車架應力、位移云圖
2.6 強度校核
巴哈車架整體強度的安全系數是車架材料4130合金鋼管的屈服極限值與車架在不同工況下計算出來的最大應力值之比。當安全系數>l時,說明巴哈車架的強度符合要求,在行駛過程出不會出現問題,安全可靠[8];當安全系數<l 時,說明車架的強度不滿足要求,車架很可能在行駛過程中發生損壞,這是不被允許的[9];但是安全系數太大也不好,這說明對材料的利用率太低,一般情況下不大于2.5。巴哈車架再三種工況下的安全系數如表2所示。

表2 巴哈車架在三種工況下的安全系數
對比表2中的安全系數,可見車架安全系數過于保守,最小的安全系數也有1.59,最大達到了10.21,這說明車架整體的強度、剛度富冗余太大,需要進行優化。
3 巴哈賽車車架的輕量化優化
3.1 車架鋼管尺寸的DOE優化
DOE(Design Of Experiment)技術方法提供了運行一系列試驗的計劃和分析工具。在HyperStudy中實現DOE的基本過程為:首先通過設定目標函數來確定試驗的評價目標;然后確定一套試驗方案,隨后運行設計好的試驗方案得到DOE設計結果,最后通過分析結果確定最終的參數匹配方案[10,11]。HyperStudy中的DOE技術可采用用戶自定義的試驗矩陣,也可采用全因子試驗法,本文采用的是全因子試驗法。
結合有限元分析結果將車架所用鋼管的尺寸分為主要部件和次要部件,圖7中紅色部分為主要部件,綠色部分為次要部件。
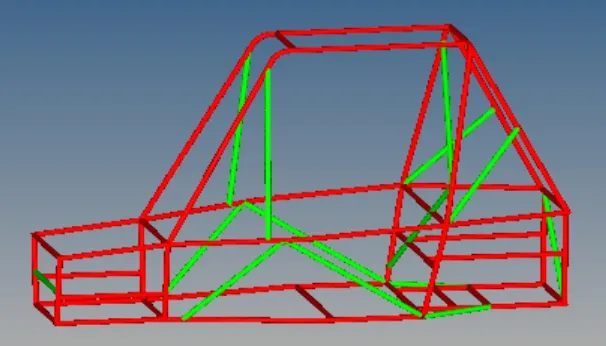
圖7 車架的主要部件和次要部件
通過對靜力分析結果及整車要求建立兩個響應。第一個響應為在保證強度、剛度的基礎上使質量最小;因為在急轉彎工況下,最大應力值最大為243.5Mpa,安全系數為1.59,故我們建立第二個響應為在急轉彎工況下的最大應力值在160Mpa和320Mpa之間,即安全系數在1.2和2.5之間。計算結果如表3所示。
根據計算結果,同時結合現在市面上能夠買到的4130合金鋼管的尺寸,將2.6mm壁厚的鋼管作為主要部件,1.5mm壁厚的鋼管作為次要部件。原車架的總質量達到了66.2kg,優化后車架總質量52.3kg,前后相比減輕了13.9kg。
3.2 優化前后車架模態結果對比
計算優化車架的前12階固有頻率,去掉前6階剛體模態,并將第7階頻率記為第一階,對比優化前后車架的模態,如圖8所示。
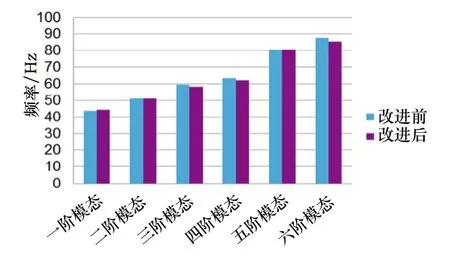
圖8 優化前后車架模態結果對比圖
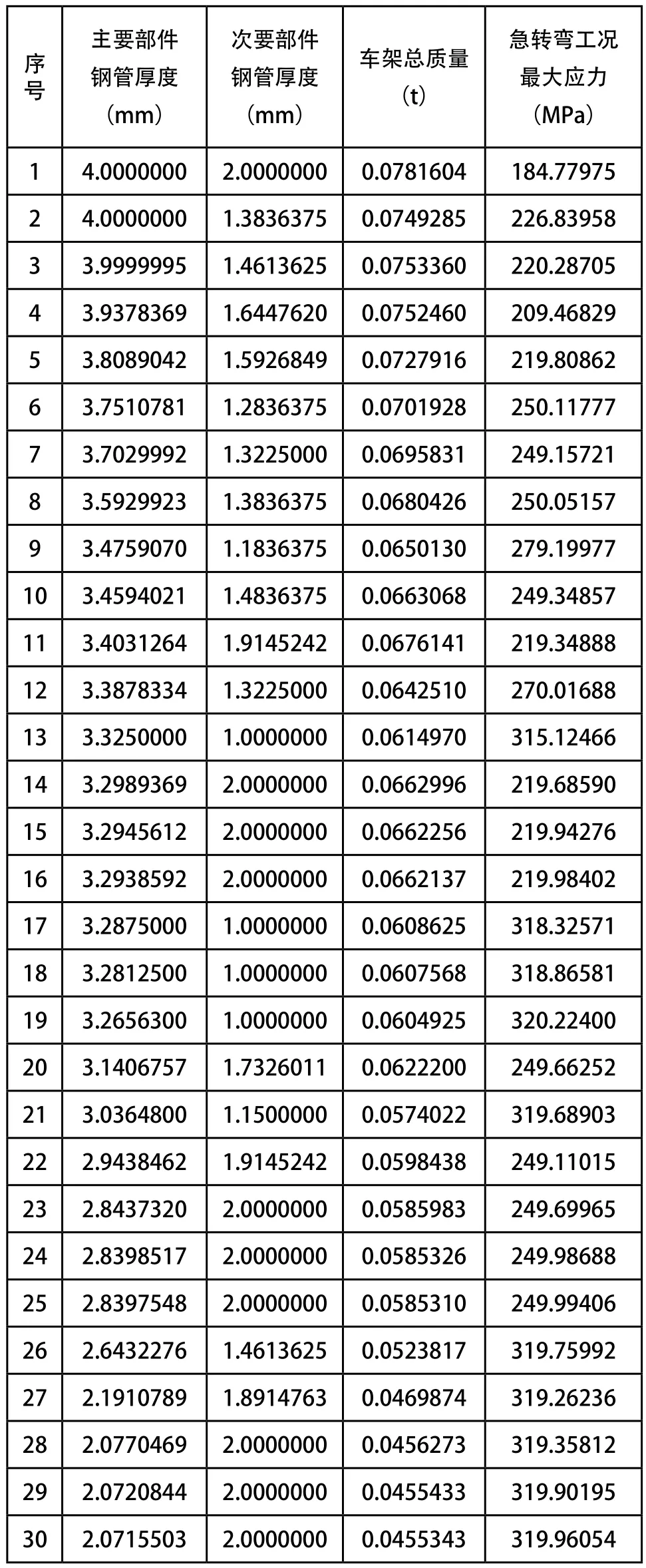
表3 HyperStudy計算結果
優化前后車架各階模態固有頻率數值變化不大,在4Hz以內,且遠高于各激振源頻率,說明新優化的巴哈車架在實際使用時不會發生共振現象,動態特性理想。
【】【】
3.3 優化后車架各工況分析
改變原車架有限元模型的各部分鋼管厚度(主要部件2.6mm,次要部件1.5mm)后再做一次滿載彎曲工況、急轉彎工況和緊急制動工況,其約束和受力情況與原車架相同。分析結果如圖9所示。

圖9 優化前后各工況最大應力應變對比圖
通過對比各工況計算結果,可以看出優化后車架的應力應變分布更加均勻,剛強度富余量明顯減小,雖然使用了更薄的鋼管,但三個工況中出現的最大應力值319.8MPa,也比4130鋼管的屈服極限更低。且安全系數更加合理,表明優化車架的設計安全合理,同時也達到了節約材料、降低車架重量的目的。
4 結論
本文通過對全地形巴哈賽車車架的設計、分析及優化,得出以下結論。
1)通過人體工程學分析及整車裝配,使得設計的車架能滿足實際使用要求。
2)在車架剛強度均有冗余的情況下,采用DOE技術對車架進行尺寸優化,優化后車架重量由66.2kg下降到52.3kg,前后相比減輕了13.9kg,輕量化效果明顯。
3)通過模態分析,保證賽車在行駛中車架不會與其他激振頻率發生共振,動態性能良好。
4)通過各工況的靜力分析,計算結果表明車架應力應變在要求范圍內,設計安全合理。
針對此全地形賽車車架的設計、分析及優化流程,可以推廣并應用到其他鋼管桁架式車架的開發中。
[1]汪俊,馬雷廷.基于Hyperworks的FSAE車架有限元分析及優化[J].AGRICULTURAL EQUIPMENT & VEHICLE ENGINEERING,2014,52(8).
[2]周明華,李紅,駱群.全地形車車架的有限元建模和模態分析[J].機械工程與自動化,2015(6):34-35.
[3]陳旭,婁威振,蔣亞東.全地形車車架靜動態特性分析與輕量化設計[J].重慶理工大學學報:自然科學版,2015,29(2):1-6.
[4]黃云濤.全地形車車架動態特性分析與結構優化[D].重慶理工大學,2015.
[5]于淼,杜俊廷,魯植雄.基于ANSYS的FSC車架有限元分析[J].農業裝備與車輛工程,2014,52(9):20-22.
[6]趙帥,隰大帥,王世朝.FSAE 賽車車架的強度和剛度分析[J].計算機輔助工程,2011,20(4):53-56.
[7]趙帥,隰大帥,王世朝.FSAE賽車車架的強度和剛度分析[J].計算機輔助工程,2011,20(4):53-56.
[8]許佩霞,蔡炳芳.基于ANSYS的全地形車車架結構優化設計[J].機械設計,2008,25(12):56-58.
[9]張心光,高賓,王巖松.基于不同工況下的FSC賽車車架有限元分析[J].制造業自動化,2015,37(19):44-46.
[10]Christopher Scott Baker. FOES Formula SAE-A Space Frame Chassis Design[J].Master Dissertation of University of Southern Queensland,2004.
[11]LuqueP, MantarasD.A.Pneumatic suspensions in semi-trailers[J].Heavy Vehicle Systems,2003(10):309-320.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
