基于機會螞蟻群集的多頻段融合GPS弱信號跟蹤采集
2018-01-18 09:19:34,,,
計算機工程 2018年1期
,, ,
(1.太原理工大學 電氣與動力工程學院,太原 030024;2.煤礦電氣設備與智能控制山西省重點實驗室,太原 030024;3.山西太原天地方圓電子科技有限公司,太原 030024)
0 概述
GPS是目前應用最廣泛的一種衛星導航系統,在煤礦安全[1]、現代化工業制造、運輸和社會生活[2]等各個行業領域對定位與導航的依賴性越來越強,而GPS擔任著重要角色,正發揮著關鍵作用。
在GPS定位過程中,如何分配資源、控制信號傳輸過程以便提供定位精度成為關鍵因素之一。文獻[3]將螞蟻算法應用于動態虛擬仿真建模,結合指引因子螞蟻算法提出了一種的可行的有效的仿真資源分配方案。文獻[4]針對高速無線網絡的用戶規模對資源分配和信號傳輸的制約問題,提出了一個獨特的蟻群優化方法,可以有效連續消除干擾。但是上述文獻的螞蟻算法的復雜度和自適應能力并未得到深入分析。文獻[5]提出基于連通性保持的分布式群集控制協議,該協議不僅光滑有界有效消除了抖振現象,而且基于群集控制實現了目標個體運動和系統拓撲管理。因此,群集系統與分群運動相結合[6], 進行目標運動建模和管理控制成為有效解決方案。為了消除二階多自主體系統的干擾,文獻[7]基于個體局部信息,研究一種分布式控制協議。該協議可以在外界干擾的環境中依然滿足領航者自主群體群集運動同步條件。
在GPS定位與跟蹤應用中,弱信號是約束GPS信號檢測與采集的重要因素。文獻[8]的弱信號恢復方法充分發揮三維曲波變換傳統的優勢,有效解決了強噪聲環境的弱信號檢測與修復問題。但是,隨著GPS信號強度的降低,容易被噪聲淹沒,因此,文獻[9]借助杜芬振子及其高敏感特性,建立一種變相位周期策動力杜芬振子弱信號檢測方法。該方法很難高效實現多徑干擾和惡劣復雜環境 GPS 信號的跟蹤,于是文獻[10]將碼環跟蹤鑒相算法與修正因子相結合,實現了多徑干擾下 GPS 弱信號的跟蹤。文獻[11]針對信號漂移現象,通過將長時間壓縮感知跟蹤與檢測相融合,準確捕獲復雜或被隱蔽的目標。文獻[12]分析了限制相干積分在采集算法由于導航數據位符號化,提出了一種新的并行采集與轉換檢測算法,以便克服位符號化的局限性。文獻[13]通過重新縮放和自適應隨機共振,提出了一種新的全球導航衛星系統弱信號捕獲方法,解決全球導航衛星系統難以采集高靈敏度信號的問題。然而,GPS信號遇到多徑傳播時,接收到的波形容易發生扭曲失真,降低信號采集精度,文獻[14]將貝葉斯估計和伯努利高斯-拉普拉斯分布相結合,有效提高了GPS信號跟蹤敏感度。文獻[15]提出了一種空間常見的稀疏基于大規模多輸入多輸出頻分雙工自適應信道估計和反饋方案系統,以適應訓練開銷和導頻設計可靠性估計,降低了下行鏈路的信道狀態信息開銷。
上述研究成果對于GPS弱信號的提取和多頻段對信號檢測、采集及跟蹤性能的影響未做詳細分析,因此,本文建立機會螞蟻群集網絡模型,研究多頻段融合模型,從而提出基于機會螞蟻群集的多頻段融合GPS弱信號跟蹤采集算法。
1 機會螞蟻群集模型
基于螞蟻群集算法為信號檢測與跟蹤提供元數據時,以下3個關鍵因素可能會制約螞蟻個體行為分析精度和群體感知能力:1)時變的信號強度;2)動態的目標軌跡;3)未知的外界干擾和內部信號失真。上述3個方面因素會隨著螞蟻群體狀態的變化而不同程度地影響螞蟻群體規模和螞蟻個體行為的可識別性,在最壞情況下將嚴重制約螞蟻群集性能。
基于上述3個方面因素,根據信號源的時空軌跡和相鄰螞蟻個體狀態,以改善螞蟻群集信號捕捉能力和元數據精度為目標,對螞蟻群集進行優化和重組。
螞蟻群集網絡系統架構如圖1所示。其中,有5個螞蟻個體目標分別是a、b、c、d、e。2個螞蟻目標之間的實線箭頭表示螞蟻間有信號傳輸,并定義了傳輸方向。2個螞蟻目標之間的虛線表示螞蟻間的信號時變軌跡,且信號傳輸方向未知。hi表示信號輸入強度。ho表示信號輸出強度,螞蟻個體目標d和e可以向外拓展,與其他螞蟻群集建立網絡架構。

圖1 螞蟻群集系統架構
從信號強度的時變特性和螞蟻個體動態的目標軌跡角度出發,每個螞蟻個體的狀態表征受到各種外界因素約束和信號失真條件限制,這種限制條件組成了一個螞蟻群集網絡架構多時空、高維度的隨機過程。該過程如式(1)所示。
(1)
其中,SC表示螞蟻群集信號強度,dS表示信號維度,Tt表示信號的時間軌跡,TS表示信號的空間軌跡,Mef表示外界干擾因素矩陣,ML_sd表示信號失真矩陣。
函數Ht(x,y)可以統計螞蟻群集網絡內部信號發送隨機序列及信號強度,函數gt(x,y)可以統計螞蟻群集網絡外部信號發送隨機序列及信號強度。
由式(1)可以發現,螞蟻群集信號強度變化具有非線性特征,結合信號時變和螞蟻個體軌跡變化,發現單個螞蟻的隨機性和螞蟻群集網絡系統狀態受到多種因素約束和限制,例如螞蟻群集所處外界環境、信號軌跡控制等。因此,當信號在螞蟻群集網絡中轉發時,任意2個螞蟻個體根據信號的隨機軌跡,可以機會地加入傳輸路徑,以便降低外界干擾因素對函數Ht的影響和信號失真對函數gt的干擾,機會過程控制如圖2所示。其中,在信號發送節點與接收節點之間由機會螞蟻群集網絡覆蓋。W表示激活狀態的螞蟻個體目標,C表示候選螞蟻個體目標,實線矩形中是處于工作狀態的螞蟻群集網絡,該網絡根據式(1),機會地從候選C螞蟻個體群中選擇最佳螞蟻個體加入新的螞蟻群集網絡,從而形成虛線矩形所示的機會螞蟻群集網絡。

圖2 螞蟻群集機會控制過程
因此,機會螞蟻群集信號強度SC_O可由式(2)計算得到。
(2)
其中,δ表示外界干擾因素的信號輸入機會權重系數,ρ表示信號時變軌跡的信號輸出機會權重系數。
2 多頻段融合GPS弱信號跟蹤采集算法
基于機會螞蟻群集網絡架構的GPS信號頻域表征傳播過程具有式(3)所示的特點。
(3)
其中,Fq表示各射頻頻段的上限值,Si表示GPS信號采樣樣本點功率,SSi表示信號序列,α表示GPS信號與螞蟻個體目標天線夾角,K表示信號序列長度,n表示樣本點數,x(f)表示GPS信號發送強度,y(t)表示機會螞蟻群集輸出信號強度,IS表示GPS信號多頻段頻域上的信號強度特征,IS[0]表示GPS弱信號頻域表征傳播過程,將其作為GPS信號跟蹤的初始值,可由機會螞蟻群集的輸出信號計算得到。
因此,基于機會螞蟻群集網絡架構的GPS信號頻域跟蹤流程模型如圖3所示。其中,弱信號頻域融合可由式(4)結合如圖4所示流程加以完成,生成有助于提高GPS弱信號采集和跟蹤的弱信號融合體。

圖3 頻域GPS信號跟蹤流程
(4)
其中,SW_F表示弱信號頻域融合體,β表示提取弱信號的相位偏移弧度。
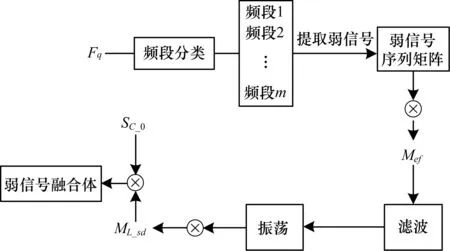
圖4 GPS弱信號融合體生成流程
綜上,多頻段融合GPS弱信號跟蹤敏感度ST如式(5)所示。
(5)
其中,根據GPS信號序列長度和樣本數的比值,結合頻段上限和外界干擾矩陣的秩,判斷多頻段。采集GPS弱信號形式如式(6)所示。
(6)
其中,R(ML_sd)表示矩陣ML_sd的秩。
3 算法性能分析
仿真實驗全面分析了機會螞蟻群集算法(記為OAC)的平均執行時間,多頻段融合GPS弱信號跟蹤采集算法(記為MDF)的跟蹤精度和信號采集敏感度。同時,機會螞蟻群集算法的平均執行時間與靜態螞蟻群集算法(記為SAC)進行比對,所提算法的跟蹤精度和信號采集敏感度與未提取GPS弱信號的跟蹤采集算法(記為NE-WS)進行了比對。
使用 Matlab的Simulink進行GPS信號的建模和仿真,再結合數學分析,驗證和測試本文提出算法的性能。仿真GPS信號從“GPSdata-DiscreteComponents-fs38_192-if9_55.bin”中提取得到。在實驗中,設定螞蟻群集的個體數為5~10的隨機數,螞蟻個體間按照如圖2所示,根據式(2)建立機會網絡架構。GPS發送端的信號漂移軌跡遵循如圖3所示約束條件。該信號軌跡近似固定向東南反向以0 m/s~50 m/s的速度直線漂移。螞蟻群集的整體運動軌跡與 GPS 衛星發送端在二維平面上的方向夾角為10°~35°的隨機數。其他實驗參數如表1所示。

表1 實驗參數
其中,PS表示GPS信號功率。GPS弱信號產生模型如式(7)所示。
(7)
圖5給出了機會螞蟻群集算法(記為OAC)與靜態螞蟻群集算法(記為SAC)的平均執行時間對比結果。其中,橫坐標是被激活的螞蟻個體數。從圖5中可以發現,螞蟻群集網絡系統在外界干擾因素的信號輸入機會權重系數δ和信號時變軌跡的信號輸出機會權重系數ρ的機會控制下,不僅可以有效消除外界干擾和準確獲得信號漂移軌跡,還具有較高的實時性,為捕獲GPS弱信號并進行有效跟蹤提供了基礎。

圖5 2種算法平均執行時間結果對比
跟蹤精度和信號采集敏感度對比結果如圖6、圖7所示。從圖6可以看出,一方面驗證了弱信號的存在對GPS信號跟蹤采集的影響較為嚴重,NE-WS算法未有效提取弱信號而使得敏感度急劇下降。敏感度的下降直接導致跟蹤精度在食欲上始終處于低谷,如圖7所示。然而,MDF算法有效地提取GPS弱信號,并基于多頻段加以融合,所以具有高敏感度和跟蹤精度。

圖6 2種算法敏感度結果對比

圖7 2種算法跟蹤精度結果對比
4 結束語
有效獲取GPS弱信號,消除各種噪聲干擾和抵消信號失真是改善惡劣復雜環境的GPS定位與跟蹤性能的重要保障。本文以螞蟻群集信號檢測與跟蹤元數據為研究對象,通過獲取多時空、高維度的螞蟻群集網絡的隨機分布,基于信號的隨機軌跡機會地控制螞蟻個體狀態。獲取機會螞蟻群集網絡的GPS信號頻域表征后,生成GPS弱信號多頻段融合體,并提出多頻段融合GPS弱信號跟蹤采集算法。仿真實驗結果表明,該算法與靜態螞蟻群集算法相比執行時間更短,與未提取GPS弱信號的跟蹤采集算法相比具有更高的跟蹤精度和信號采集敏感度。
[1] 高斌斌.煤礦員工考勤與井下人員定位系統的研究[J].機械工程與自動化,2015(6):163-164.
[2] 王 汐,周少武,曾照福,等.微小型群機器人室外組合定位系統與方法[J].計算機工程與應用,2015,51(15):261-265.
[3] 鄧承剛,李國徽,楊 浩,等.基于指引因子螞蟻算法的仿真資源分配策略[J].華中科技大學學報(自然科學版),2015,43(9):1-6.
[4] GHANI H A,HAMZAH M H,SYAHALI S,et al.Ant-colony Algorithm with Interference Cancellation for Cooperative Transmission[J].IET Signal Processing,2016,10(6):603-610.
[5] 毛昱天,陳 杰,方 浩,等.連通性保持下的多機器人系統分布式群集控制[J].控制理論與應用,2014,31(10):1393-1403.
[6] 楊盼盼,劉明雍,雷小康,等.群集系統分群行為建模與控制研究進展[J].控制與決策,2016,31(2):193-206.
[7] 褚福芳,楊洪勇.具有干擾的多自主體系統的群集運動與速度同步[J].復雜系統與復雜性科學,2015,12(1):85-91.
[8] 胡 雨,謝 凱, 阮寧君,等.基于三維曲波變換的弱信號恢復方法研究[J].計算機工程與應用,2016,52(18):199-202.
[9] 芮國勝,劉林芳,張 嵩,等.變相位周期策動力杜芬振子弱信號檢測方法[J].電子測量與儀器學報,2015,29(11):1662-1668.
[10] 衛 潔,范勝林,周 超,等.多徑干擾下GPS弱信號跟蹤算法研究[J].云南民族大學學報(自然科學版),2014,23(5):373-378.
[11] 董世明,陳一民,黃 晨,等.基于壓縮感知的長時間實時跟蹤技術研究[J].計算機應用與軟件,2015,32(5):207-211.
[12] ZHU C,FAN X.A Novel Method To Extend Coherent Integration for Weak GPS Signal Acquisition[J].IEEE Communications Letters,2015,19(8):1343-1346.
[13] LANG R,LI X,GAO F,et al.Re-scaling and Adaptive Stochastic Resonance as a Tool for Weak GNSS Signal Acquisition[J].Systems Engineering and Electronics,2016,27(2):290-296.
[14] BRAHIM F,CHONAVEL T,TRUBUIL J,et al.Precise Acquisition of Global Navigation Satellite System Signals in the Presence of Multipath and Influence on Tracking Capability[J].IET Radar Sonar Navigation,2015,9(7):790-801.
[15] GAO Z,DAI L,WANG Z,et al.Spatially Common Sparsity Based Adaptive Channel Estimation and Feedback for FDD Massive MIMO[J].IEEE Transactions on Signal Processing,2015,63(23):1.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25